


Projet de fin d'études en mécatronique
C'était mon projet de fin d'année en mécatronique à la Faculté de génie mécanique de Skopje. Son objectif était de développer un dispositif qui permettra l'interaction des mouvements réels du bras avec des modèles informatiques 3D. J'ai intégré trois champs différents dans un seul appareil, t.e. génie mécanique, électrique et informatique :
Dans la vidéo suivante, vous pouvez voir une présentation du projet. Voici son contenu :
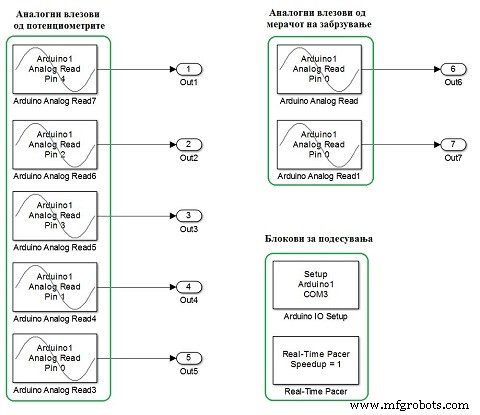
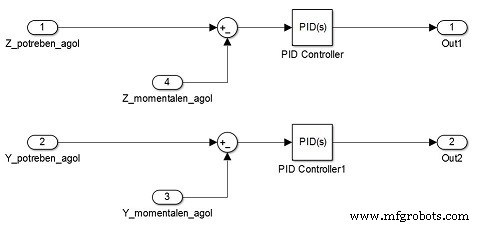
L'accéléromètre est utilisé pour suivre l'orientation du bras. Au fur et à mesure que le bras bouge, les valeurs des axes X, Y et Z de l'accéléromètre changent et sont lues dans les entrées analogiques de la carte Arduino. Selon eux, le modèle 3D bouge également.
Les potentiomètres sont utilisés pour suivre la position des doigts. J'ai attaché un ressort (ressort de stylo) à chacun des potentiomètres. Le ressort maintient le curseur du potentiomètre à une certaine position et lorsque les doigts bougent, le curseur est tiré et la résistance du potentiomètre change. Ces valeurs sont lues dans les entrées analogiques de la carte Arduino et selon elles, les doigts du modèle 3D bougent également.
J'ai utilisé un couvercle en plastique d'une calculatrice comme base sur laquelle j'ai fixé les cinq potentiomètres. Au-dessus d'eux, j'ai mis la planche à pain sur laquelle j'ai fixé la carte Arduino et l'accéléromètre à l'aide d'un ruban adhésif. Sur l'image ci-dessous, vous pouvez voir l'apparence finale de l'appareil.
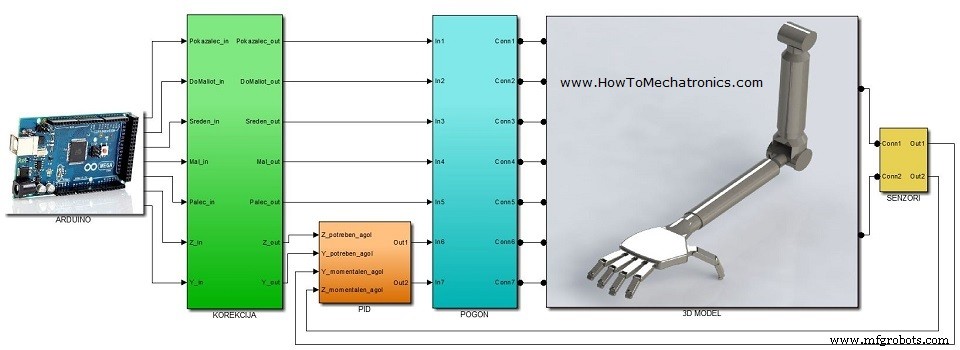
Le modèle 3D est une représentation d'un bras humain. Tout d'abord, je l'ai modélisé à l'aide de Solidworks puis je l'ai transféré dans Matlab/Simulink à l'aide de SimMechanicsLink de Matworks.
Avant de construire le modèle Simulink, j'ai d'abord dû installer le package Arduino IO qui consiste en la bibliothèque Simulink pour la communication avec la carte Arduino. En utilisant également l'IDE Arduino, j'ai dû télécharger le code sur la carte Arduino fournie avec le package pour activer la bibliothèque Simulink. Ici, je recommande vivement mon tutoriel pour Matlab et Arduino IO Package afin que vous puissiez comprendre le principe de fonctionnement et voir le code.
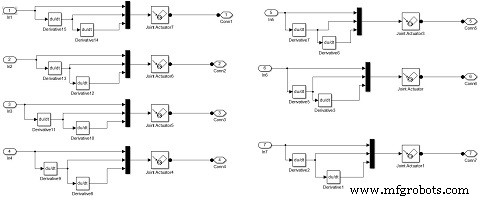
J'ai organisé mon modèle Simulink en six sous-systèmes :
Vous pouvez télécharger le modèle Simulink ici :
Vérifiez mon extension de ce projet.
J'ai reprogrammé le gant Arduino pour qu'il fonctionne comme contrôleur de jeu.
Construire l'appareil
Pièces utilisées dans ce projet


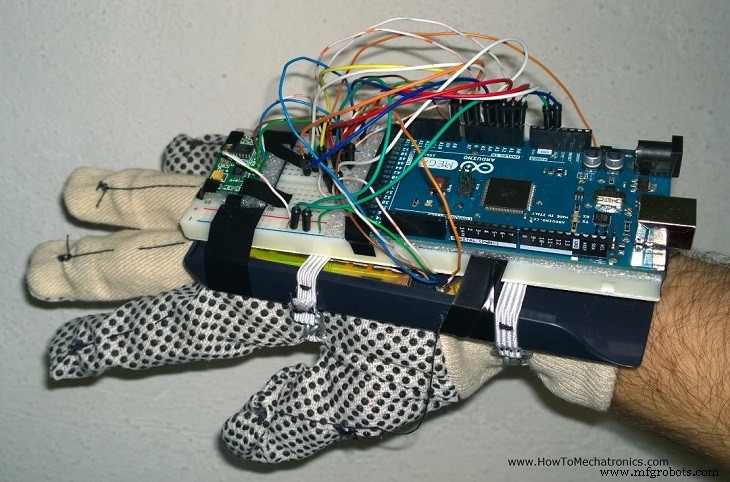
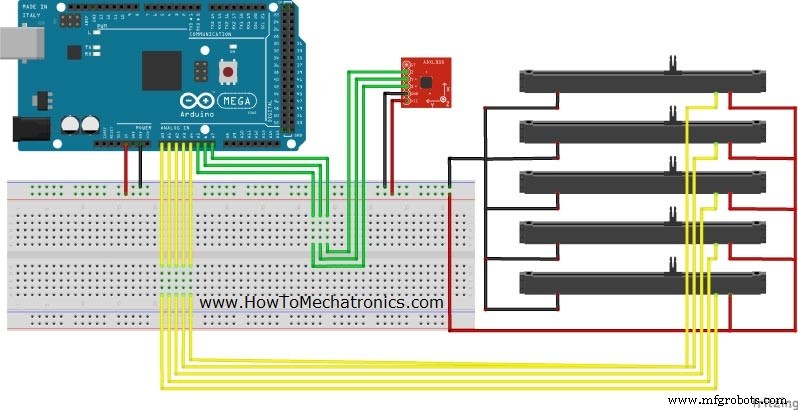
Schéma du circuit de l'appareil
Le modèle 3D

Le modèle MATLAB / Simulink

Processus de fabrication
- Idées de projets basés sur des capteurs pour les étudiants en dernière année d'ingénierie
- Stylo intelligent :projet final pour ECE5725
- Créer un moniteur Ambilight à l'aide d'Arduino
- Jeu Arduino Pong - Écran OLED
- Détecteur de fréquence audio
- clone Arduino Tamagotchi - animal numérique
- Manipulateur d'interrupteur d'éclairage sans fil
- Tech-TicTacToe
- Pistolet à eau à détecteur de mouvement