


Temps de cycle du robot :comment calculer et optimiser votre temps
Si vous souhaitez maximiser votre investissement dans la robotique, vous devez optimiser le temps de cycle du robot.
Le temps (comme on dit) c'est de l'argent. Les robots effectuent plusieurs cycles par jour. Lorsqu'un robot se déplace inutilement lentement ou de manière inefficace, cela peut signifier que vous perdez de l'argent.
Même gagner 2 secondes sur le temps de cycle du robot peut économiser des centaines d'heures de travail au cours d'une année.
Comment le calculez-vous ?
Et comment pouvez-vous vous assurer que vous ne perdez pas d'argent sans le savoir ?
Voici un guide clair pour vous.
Qu'est-ce que le temps de cycle du robot ?
Le temps de cycle du robot est le temps qu'il faut à un robot pour effectuer un cycle complet de sa tâche programmée. Il comprend à la fois le temps à valeur ajoutée (lorsque le robot se déplace ou effectue l'opération) et tout temps d'attente sans valeur ajoutée.
La recherche a montré que des temps de cycle plus courts entraînent une réduction des coûts par pièce. Plus votre temps de cycle est long, plus la création de vos produits coûte cher.
Parce que les robots sont très cohérents, le temps de cycle a un impact puissant sur la productivité globale du robot. Toute inefficacité ou perte de temps se produira à chaque cycle. Ainsi, l'inefficacité est multipliée.

Le temps, c'est de l'argent ! La nécessité d'optimiser le temps de cycle
Pourquoi est-il important de réduire le temps de cycle d'un robot ? Parce que le temps c'est de l'argent !
Imaginez que vous ayez un robot effectuant 1000 cycles par jour pendant 5 jours chaque semaine. Raser seulement 2 secondes sur le temps de cycle vous ferait gagner 33 minutes par jour. C'est une économie de 144 heures par an !
Comme le dit l'intégrateur de systèmes Adil Shafi, le temps de cycle est "l'une des justifications financières les plus importantes dans l'analyse de rentabilisation de la robotique. Chaque fraction de seconde pendant laquelle quelque chose peut être rendu plus rapide se traduit directement en dollars. »
Vous devez toujours être à l'affût des moyens de réduire le temps de cycle de votre robot, même si ce n'est que légèrement. Au fil du temps, cela peut représenter d'énormes économies.
Quels facteurs affectent le temps de cycle du robot ?
Divers facteurs affectent le temps de cycle de votre robot. Certains d'entre eux sont sous votre contrôle pour changer. D'autres non.
Les facteurs qui l'affectent incluent :
- Le modèle du robot
- Le modèle et la configuration du contrôleur
- Caractéristiques de la tâche que vous effectuez
- La vitesse et l'accélération du robot
Certains facteurs sont liés à des différences subtiles entre les robots physiques. Par conséquent, il n'est pas toujours possible d'obtenir un calcul de temps de cycle complètement précis dans un simulateur de robot. Mais vous pouvez vous en approcher assez avec le bon outil.
Comment calculer le temps de cycle du robot avec RoboDK
Avant de pouvoir améliorer votre temps de cycle, vous devez d'abord le calculer. C'est là que vous pouvez bénéficier d'un bon simulateur de robot.
RoboDK inclut l'estimation du temps de cycle en tant que fonctionnalité principale du logiciel.
Les étapes pour estimer votre temps de cycle dans RoboDK sont :
- Définissez la vitesse et l'accélération des articulations de votre robot aussi précisément que possible.
- Ajoutez des arrondis à tous les mouvements de robot pertinents (voir ci-dessous).
- Soyez conscient des retards et des pauses dans le programme du robot. Le logiciel les ajoutera également au temps de cycle.
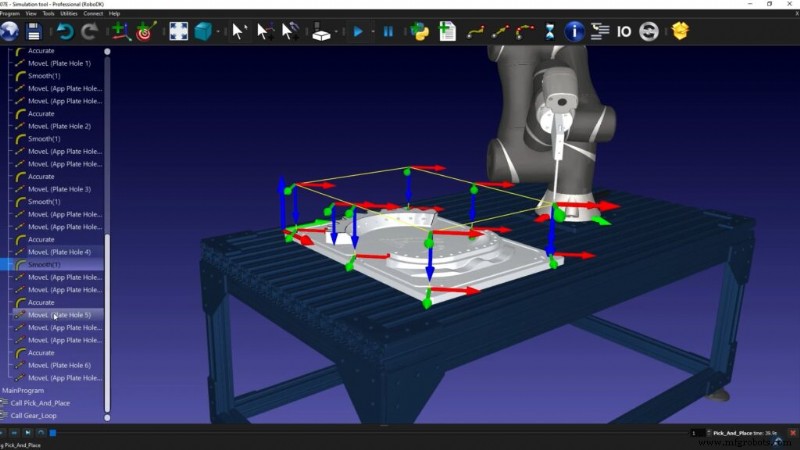
- Déplacez votre robot jusqu'à la position de départ souhaitée. Cela garantit que RoboDK n'ajoute pas de mouvement inutile au début du calcul.
- Exécutez complètement le programme du robot. Une fois le programme terminé, vous verrez le temps de cycle estimé dans le coin inférieur droit de l'écran.
Simple !
Quelle est la précision de l'estimation du temps de cycle de RoboDK ?
Pour les raisons expliquées ci-dessus, l'estimation du temps de cycle ne peut pas être complètement précise. Il ne peut pas vous dire le temps de cycle exact que vous obtiendrez sur le robot physique.
Dans les tests que nous avons effectués, il est courant que le temps de cycle ait une précision d'environ 95 à 99 % par rapport à l'exécution de la même tâche sur le robot physique. C'est généralement plus que suffisant pour commencer à optimiser la tâche de votre robot.
Plus votre simulation est précise, plus l'estimation du temps de cycle sera précise.
Outil bonus :étude approfondie du temps de cycle
Il existe un outil supplémentaire dans RoboDK qui vous donne des informations supplémentaires utiles sur le temps de cycle de votre tâche.
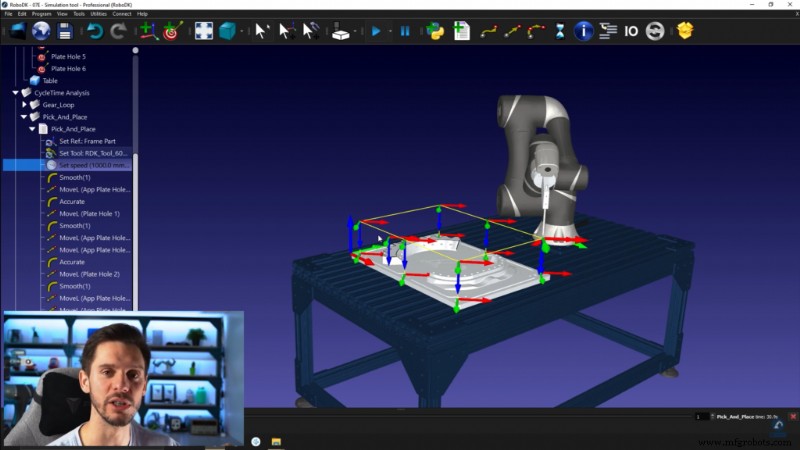
Lorsque vous accédez au menu Outils et sélectionnez "Exécuter le script", vous verrez les 3 outils suivants :
- CycleTimeStudy — Cela vous aide à choisir les meilleures vitesses d'articulation pour votre robot. Il vous donne une comparaison détaillée des différentes vitesses linéaires et articulaires de votre robot, avec le temps de cycle estimé pour chacune avec votre programme actuel.
- Affichage du temps de cycle — Cela affiche le temps de cycle de votre robot actuel tel que calculé ci-dessus pour un programme de robot spécifique.
- CycleTimeDisplayAll — Cela affiche les estimations de temps de cycle pour tous les programmes de robot dans votre arborescence de projet actuelle.
3 façons astucieuses d'optimiser le temps de cycle du robot
Maintenant que vous connaissez le temps de cycle de votre robot, comment pouvez-vous l'optimiser ?
Voici 3 excellentes façons d'optimiser le temps de cycle :
1. Ajoutez des arrondis à vos mouvements de robot
L'arrondi est une méthode pour réduire cet arrêt-démarrage en faisant avancer le robot le long d'une légère courbe au lieu d'aller vers le coin. Cela réduit le temps de cycle. Vous ne devez l'utiliser que pour les chemins où vous n'avez pas besoin d'un mouvement très précis.
Chaque fois que votre robot se déplace dans un coin d'un mouvement, il devra s'arrêter et redémarrer son mouvement. Par exemple, pour un robot suivant une trajectoire carrée, il s'arrêtera à chacun des coins du carré.
2. Optimisez la vitesse et l'accélération du robot
Il y a un équilibre délicat entre la vitesse et l'accélération du robot. Changer l'un d'entre eux, ou les deux, peut avoir un impact significatif sur votre temps de cycle.
La vitesse et les accélérations sont différentes pour chaque modèle de robot. Expérimentez avec différentes vitesses et accélérations pour trouver la meilleure configuration pour votre robot et votre tâche.
3. Suivez les métriques et améliorez continuellement
La meilleure façon d'optimiser quoi que ce soit est de le suivre et de l'améliorer continuellement au fil du temps. Cela vous oblige à choisir les bonnes statistiques.
La première mesure à suivre lors de l'optimisation de la tâche de votre robot est le "temps de cycle" lui-même. Pour chaque modification apportée au programme du robot, notez son effet sur le temps de cycle. Au fil du temps, vous pouvez également suivre des statistiques telles que "nombre de cycles par jour" ou "cycles terminés".
Regardez notre formation gratuite sur le temps de cycle du robot
Voulez-vous voir comment utiliser la fonctionnalité de RoboDK pour améliorer votre propre cellule robot ?
Vous pouvez en apprendre encore plus grâce à notre formation vidéo gratuite. Dans la leçon sur le temps de cycle, vous découvrirez le processus du début à la fin.
Vous pouvez regarder la leçon sur le temps de cycle ici.
Tout d'abord, c'est une bonne idée de regarder d'abord la leçon sur l'arrondi et la leçon sur l'accélération du robot.
Quelles questions avez-vous ? Dites-le nous dans les commentaires ci-dessous ou rejoignez la discussion sur LinkedIn, Twitter, Facebook, Instagram ou sur le forum RoboDK. Consultez également notre vaste collection de vidéos et abonnez-vous à la chaîne YouTube RoboDK
Robot industriel
- Comment obtenir la date et l'heure actuelles en Python ?
- Comment optimiser les systèmes de fabrication et gagner du temps
- Comment construire et optimiser un programme de maintenance préventive
- Livre blanc :Comment trouver le potentiel de votre robot
- Comment calculer et améliorer la disponibilité des machines
- Comment choisir sa machine industrielle ?
- Comment rationaliser votre fabrication et votre expédition
- Comment réduire le temps de formation pour le soudage robotisé
- Comment savoir qu'il est temps d'acheter un robot ?