


Comment décider quel robot est le meilleur avec la visualisation de l'espace de travail
Comment savoir si un robot conviendra aux besoins d'espace de votre tâche avant de l'acheter ?
Même lorsque vous avez réduit votre sélection à l'aide de toutes les spécifications et mesures habituelles, vous pouvez toujours avoir des doutes tenaces.
Le robot sera-t-il si grand qu'il ne rentrera pas dans l'espace dont vous disposez ?
Si vous optez pour un robot plus petit, pourra-t-il atteindre toutes les zones dont vous avez besoin pour la tâche ?
Existe-t-il un moyen d'optimiser la taille du robot pour qu'il soit le plus efficace ?
Avant d'acheter un robot en particulier, il est difficile de dire ce que ce sera de l'avoir dans votre établissement à côté de vous. Vous pouvez regarder toutes les vidéos YouTube que vous aimez, lire toutes les fiches techniques et même regarder d'autres robots dans les installations d'autres personnes…
Sans voir comment le robot s'adaptera à votre tâche spécifique, cela peut parfois se transformer en un jeu de devinettes. Vous faites autant de calculs que vous le pouvez, puis vous espérez juste.
Ou vous choisissez d'être trop conservateur et de céder d'énormes quantités d'espace au sol à un robot qui n'en a pas besoin.
Peut-être avez-vous déjà parcouru notre Guide de choix d'un robot pour la fabrication.
Vous avez identifié le type de robot dont vous avez besoin, l'effecteur final et les accessoires. Vous avez réduit vos options à une sélection de robots en fonction de leur charge utile et de leur répétabilité. Et vous avez utilisé nos outils pour sélectionner une portée qui vous semble plus ou moins raisonnable.
Mais, vous n'êtes toujours pas en mesure de visualiser tout l'espace que chaque robot occupera.
Pourquoi il est difficile d'imaginer l'espace qu'un robot occupera
Le problème avec les robots, c'est qu'ils sont si dynamiques.
Avec une machine CNC, par exemple, vous pouvez vous approcher d'une machine lors d'un salon professionnel et voir exactement combien d'espace elle occupera sur votre lieu de travail. La taille réelle de la machine est simple à calculer :il s'agit essentiellement d'un grand cuboïde.
Avec un robot, l'espace qu'il occupe n'est pas si simple. En plus des dimensions physiques du robot lui-même, il occupe également un espace étendu contenant tous les emplacements que l'effecteur final du robot atteindra lorsque le robot se déplacera. C'est ce qu'on appelle l'"espace de travail" du robot.
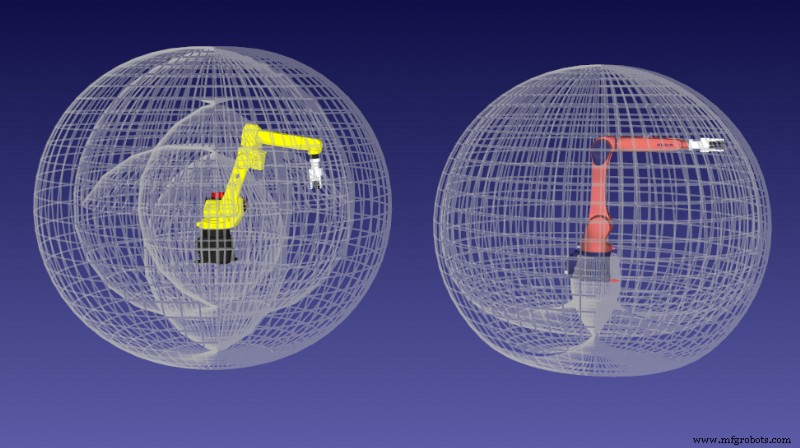
La plupart des robots industriels 6 DoF ont un espace de travail qui ressemble un peu à une sphère. Les robots Delta ont un espace de travail complexe qui ressemble à un arc tridimensionnel. Les robots SCARA ont un espace de travail cylindrique.
Il est difficile de dire simplement en regardant un robot à quoi ressemblera son espace de travail.

Comment pouvez-vous vous assurer que le robot que vous envisagez disposera d'un espace de travail adapté à vos besoins ?
La visualisation de l'espace de travail vous aide à prendre une meilleure décision
Heureusement, il existe un moyen de voir facilement l'espace de travail du robot et de découvrir comment cela affectera votre tâche spécifique.
Et vous pouvez le faire avant même de choisir le robot que vous souhaitez acheter.
La visualisation de l'espace de travail est un outil qui vous permet de visualiser les limites extérieures de l'espace de travail d'un robot sous forme de forme 3D. Dans RoboDK, cet espace est représenté par un contour gris placé autour du modèle simulé du robot.
Vous pouvez utiliser cette fonctionnalité pour éclairer votre décision sur le robot le mieux adapté à votre tâche.
En créant une maquette virtuelle de votre application, vous pouvez rapidement basculer entre différents modèles de robots (sans avoir à programmer la tâche elle-même) et utiliser la fonction de visualisation de l'espace de travail pour voir si chaque robot spécifique sera le mieux adapté à vos besoins.
Une fois que vous avez trouvé un robot qui correspond à la tâche - en fonction de son espace de travail - vous pouvez programmer l'application dans le simulateur pour vous assurer que le robot que vous avez choisi sera vraiment capable de faire le travail.
Fonctionnement de la visualisation de l'espace de travail
Lorsque vous regardez la fiche technique d'un robot, vous verrez normalement une représentation graphique de base de l'espace de travail de ce robot. Habituellement, il s'agit d'une vue de côté et d'une vue du dessus du robot.
De telles images sont utiles, mais pas assez.
Une visualisation de l'espace de travail est essentiellement une version 3D de ces images. Il est produit en déplaçant de manière algorithmique toutes les articulations du robot dans toutes les positions possibles et en cartographiant la position résultante de l'effecteur final dans une forme 3D.
Comme le calcul est effectué en 3D, il vous donne une perspective beaucoup plus holistique sur les capacités d'un robot particulier que vous n'auriez si vous regardiez simplement la fiche technique du robot.
L'impact de l'ajout d'un effecteur terminal
Les modifications que vous apportez au robot affectent parfois également son espace de travail. Par exemple, lorsque vous ajoutez un effecteur terminal, les dimensions de cet effecteur terminal modifient la taille et parfois aussi la forme de l'espace de travail. Dans RoboDK, vous pouvez choisir de voir l'espace de travail du robot avec et sans son effecteur final.
Chaque fois que vous ajoutez un effecteur terminal à votre robot, il est recommandé d'utiliser la fonction de visualisation de l'espace de travail pour voir son impact sur l'espace de travail du robot.
Comment commencer à utiliser la visualisation de l'espace de travail
Avec RoboDK, il est très facile d'utiliser la visualisation de l'espace de travail pour vous aider dans vos décisions d'achat de robots.
Voici les étapes pour afficher l'espace de travail d'un robot particulier :
- Chargez le modèle de robot dans RoboDK à partir de notre vaste bibliothèque de robots.
- Ouvrez le panneau des propriétés du robot en cliquant dessus avec le bouton droit de la souris dans l'arborescence du programme.
- Allez à la section intitulée WorkSpace et choisissez d'afficher l'espace de travail du robot lui-même (à partir de sa bride) ou avec l'outil actuel attaché.
- Vous verrez maintenant l'espace de travail du robot visualisé autour du robot lui-même.
Bien sûr, vous n'êtes pas limité à la visualisation de l'espace de travail d'un seul robot à la fois. Vous pouvez charger plusieurs robots dans la simulation et comparer leurs espaces de travail côte à côte.
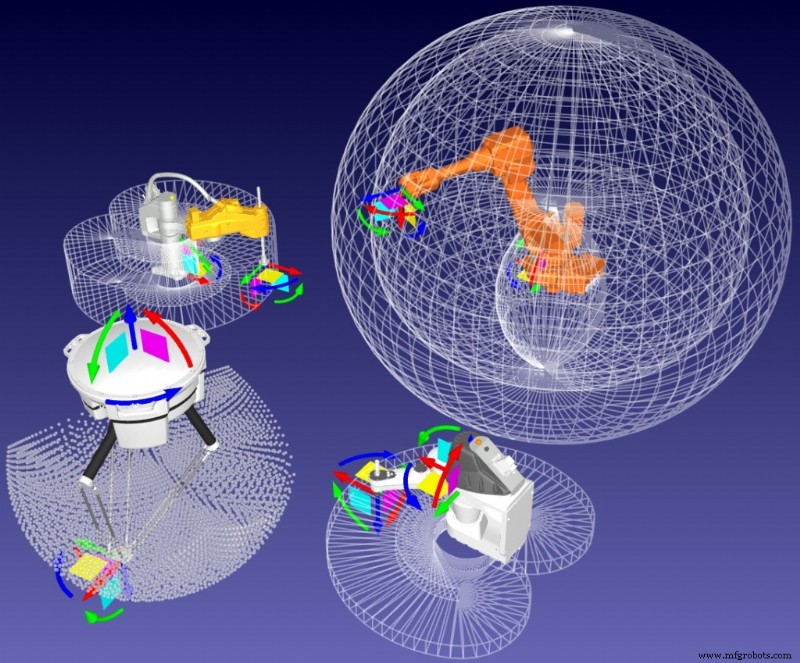
Cela peut être utile lorsque vous essayez de choisir entre deux modèles de robots différents. Mais cela peut également être utile lorsque vous utilisez plusieurs robots sur une seule tâche et que vous souhaitez savoir comment leurs espaces de travail peuvent interagir et se chevaucher.
Comment la visualisation de l'espace de travail pourrait-elle aider au déploiement de votre robot ? Dites-le nous dans les commentaires ci-dessous ou rejoignez la discussion sur LinkedIn, Twitter, Facebook, Instagram ou sur le forum RoboDK.
Robot industriel
- Quels robots de peinture industrielle fonctionnent le mieux ?
- Les 10 meilleurs fabricants de robots SCARA
- Comment choisir la société d'ingénierie qui vous convient
- Formation robotique gratuite avec RoboDK
- Robot Drilling 101 :Comment déployer un système de forage robotisé
- Comment Hollywood fabrique des accessoires époustouflants avec Robot Milling
- 10 astuces pour obtenir les meilleurs résultats avec le soudage robotisé
- Comment démarrer avec la programmation du robot Yaskawa
- Étalonnage du robot :quelles pièces doivent être étalonnées ?