


Qu'est-ce qui retient l'intégration des robots industriels ?
L'intégration de robots industriels est un processus hautement spécialisé, hautement créatif et astucieux, tandis que les personnes qui le pratiquent font souvent honneur à l'idée même d'ingéniosité humaine et de débrouillardise elle-même. À bien des égards, les intégrateurs robotiques représentent un corps d'architectes de solutions hautement spécialisés et hautement compétents qui aident les fabricants à augmenter leur productivité.
Malheureusement, il y a eu quelques éléments qui détiennent la portée et la portée de retour d'intégration de robots industriels. De plus, ce sont les artisans éprouvés - les intégrateurs de robotique en qui nous avons confiance - qui en souffrent le plus. Ce n'est pas seulement parce qu'il est difficile de trouver des personnes possédant les bonnes compétences pour l'intégration de la robotique, mais aussi parce que le travail lui-même peut être exigeant, fastidieux et avoir des bénéfices limités dans de nombreux scénarios de fabrication.
Qu'est-ce qui les retient dans la robotique ? Eh bien, d'une part, la programmation est un processus si exigeant que les efforts pour le rendre plus facile n'ont pas eu l'impact matériel qu'ils devraient pour de nombreux intégrateurs. Même là où la programmation est plus facile, les robots d'aujourd'hui ne sont pas conçus pour s'adapter à une grande variété de pièces ou d'environnements non structurés, ce qui les maintient efficacement à l'écart de nombreuses usines. La vision 3D, la fusion de capteurs et une variété de technologies promettent de rendre les robots plus autonomes, mais les bonnes compétences et les bons logiciels n'ont tout simplement pas encore été là pour rendre les choses assez faciles.
Heureusement, les bonnes solutions peuvent aider les intégrateurs de robots à enfin s'attaquer à tous ces problèmes à la fois. Lorsqu'ils le feront, ils ouvriront les portes à une variété d'industries, de processus et d'opportunités de service qui n'étaient tout simplement pas possibles dans le passé.
Simplifier la programmation n'a pas été assez simple
Le concept de robotique lui-même est, par rapport à d'autres pratiques de l'ingénierie moderne, encore quelque peu à la frontière du territoire de la science-fiction. Comment automatiser de manière fiable un processus cent, mille voire un million de fois sans risque de panne, d'arrêt ou de dégradation catastrophique ?
Les robots industriels fournis aujourd'hui - qu'ils proviennent de FANUC, Kuka, ABB, Kawasaki, Universal Robots ou de fournisseurs plus émergents et de niche - répondent généralement à ce type de normes de performance, où bien sûr leurs contraintes de processus et leurs exigences de maintenance sont respectées.
Les progrès des matériaux ont encore rendu les robots de chacun de ces fournisseurs de premier plan, plus légers, plus agiles, plus précis au-delà de ce que nous attendrions jamais des travailleurs humains. Cela a permis à chacun de développer différentes secousses, capacités de pilote et plus encore.
Dans tous ces cas, des choix de développement et d'ingénierie essentiels ont été faits pour atteindre les fonctionnalités et les niveaux de convivialité nécessaires. Bien que ce processus soit laborieux, il crée également une divergence dans les capacités, la programmation et l'adéquation de différents robots pour différentes opérations. Les intégrateurs de robots experts savent comment gérer les modèles et travailler dans des scénarios préférés, mais lorsqu'il s'agit de la rareté des compétences et des environnements dans lesquels se déployer - où ils pourraient autrement développer et diversifier leurs activités - ce mélange d'exigences de programmation de robots peut sembler être un obstacle. façon.

Dans cette brèche, un middleware unificateur pourrait être considéré par certains comme le principal moyen par lequel chaque type et fonction de robot pourrait être « harmonisé » afin de simplifier la planification et la programmation des opérations du robot.
ROS (ou, de manière assez créative, « Robot Operating System ») a été publié en 2007 pour y parvenir. ROS a au moins fourni un système utile aux universitaires pour développer et partager des applications de robot. Malheureusement, cela n'a finalement pas résolu le problème que les intégrateurs industriels devaient résoudre :la capacité à ignorer fondamentalement bon nombre des limitations liées à la planification, la programmation et le traitement à travers diverses pièces et contraintes spatiales. Tout cela pourrait plutôt leur permettre d'incorporer, d'intégrer et de vendre plus de robots dans de nouveaux processus et industries.
Le besoin de séries de pièces limitées ou minimales
En fin de compte, un middleware de robot n'accélère pas fondamentalement l'intégration du robot car la « boucle reste ouverte » :avec chaque produit, processus et programme qu'un robot entreprend, chaque étape doit être programmée, testée et validée dans un ensemble de scénarios 100 % prévisible. . Cela signifie en fin de compte que, peu importe à quel point un scénario est incrémentiel ou d'assistance, sa préparation prendra le même temps que votre processus robotique le plus important. Même si vous facilitez la programmation, un processus qui nécessite une répétition constante, ce n'est pas assez facile.
Alors que certains fournisseurs de robots industriels annoncent des langages et des méthodologies de programmation plus faciles - y compris l'utilisation accrue des IHM (interfaces homme-machine) - chaque processus doit toujours être programmé manuellement dans une certaine mesure. Ce programme, tel qu'il est généré par un être humain, doit être validé. Cela signifie qu'un temps limité peut finalement être économisé dans le processus d'intégration de la robotique.
Par exemple, il existe une tendance croissante parmi les ateliers d'usinage à utiliser des robots avec une programmation limitée en personne pour un processus reproductible. Ce processus permettra, par exemple, d'automatiser rapidement une série de quelques centaines de pièces métalliques avec un degré de précision décent, mais nécessitera finalement une quantité importante d'efforts humains, de surveillance et de reprise.
Bien que cela puisse être considéré comme accomplissant une grande partie du « travail sur le terrain », cela n'ajoute qu'un degré limité de productivité à un magasin donné et, en outre, cela présente des opportunités limitées pour les intégrateurs de robots de se développer en vendant des services dans de nouveaux environnements clients. En même temps, cela ne résout pas le problème du changement de robot entre les pièces ou dans des environnements non structurés, ou simplement ceux qui n'impliquent pas de jigging étendu.
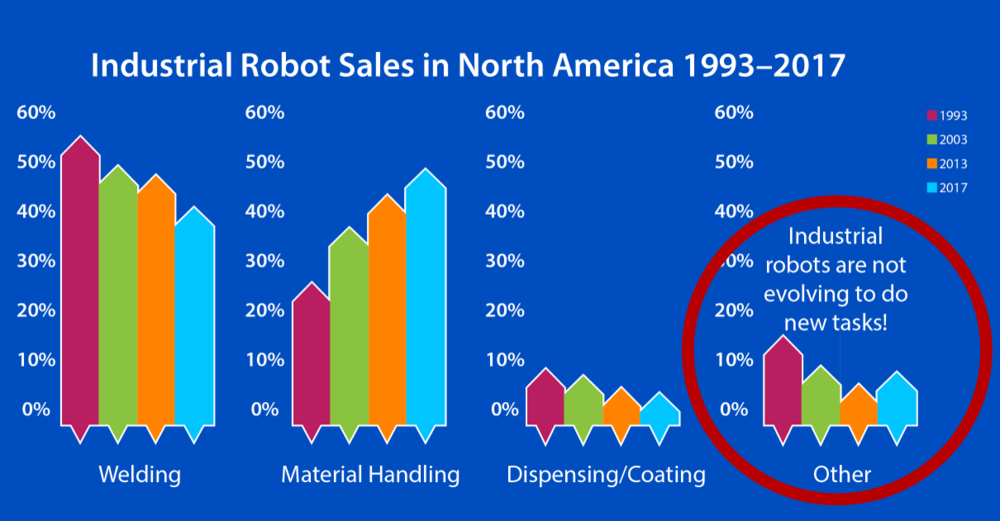
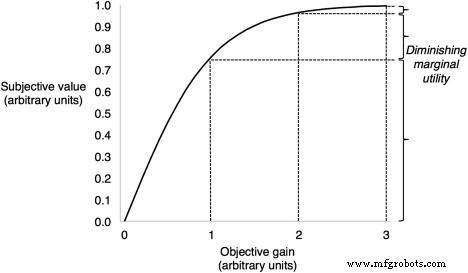
En fin de compte, celui-ci est toujours victime de la loi de « l'utilité marginale décroissante ». Pour les fabricants de masse, l'utilité marginale des robots est relativement élevée. Pour les ateliers d'usinage, il est maintenant plus élevé qu'auparavant, mais il est encore trop bas pour offrir une clientèle fiable aux intégrateurs de robotique. Pour les fabricants à mélange élevé - ceux qui possèdent des milliers de SKU et qui constituent la majeure partie de l'industrie manufacturière - l'utilité marginale des robots est si faible que peu, voire aucun, utilisent régulièrement la robotique.
Dans ces cas, les robots doivent être capables de répondre réellement aux pièces et aux environnements de manière aussi proche que possible du « temps réel ». Les nouvelles avancées de la vision 3D offrent aux intégrateurs robotiques une opportunité de donner aux robots ces sens et, finalement, de surmonter leurs défis de programmation une fois pour toutes - si, bien sûr, les robots peuvent avoir la capacité de se programmer eux-mêmes.
Capacités de détection et de vision limitées
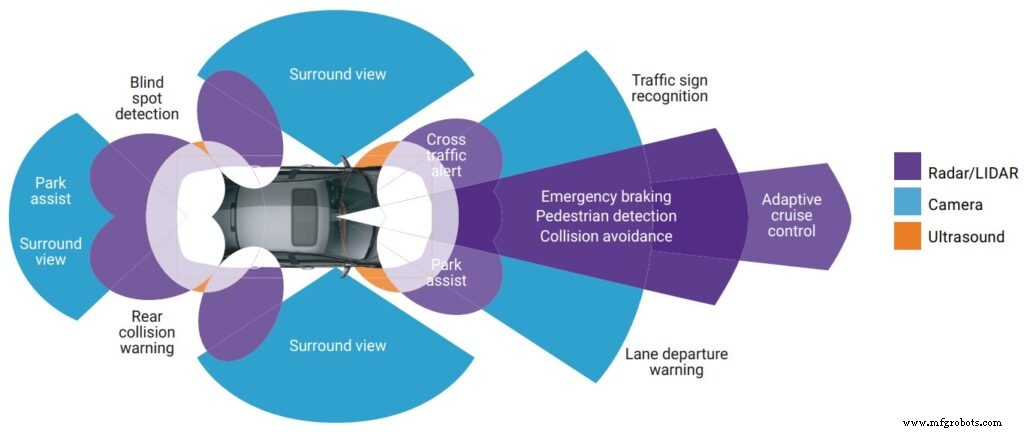
À peu près au même moment où ROS en était à ses balbutiements, une toute nouvelle façon d'aborder la vision 3D était en cours de développement. Sensor Fusion - initialement développé pour les environnements virtuels 3D comme ce qui a été accompli avec le système Xbox Kinect de Microsoft - a permis un rendu relativement précis des objets et des environnements d'une manière qu'un ordinateur peut comprendre.
Avance rapide quelques années plus tard et la fusion de capteurs est intégrée dans les voitures autonomes et les robots mobiles autonomes tout en trouvant encore plus d'utilisations dans les systèmes de réalité virtuelle qui les ont engendrés. Le concept - plutôt que des capteurs purement visuels - a ses racines dans le système de positionnement global (GPS) tout en trouvant également une traction relative dans tout, de la surveillance CVC aux dispositifs médicaux.
Pour les fabricants industriels, cependant, la fusion de capteurs ne fait que commencer en tant qu'application utile. Alors que beaucoup surfent sur la vague de l'industrie 4.0/IoT et essaient d'intégrer des capteurs dans plus d'endroits afin de réaliser une surveillance à distance, des cas d'utilisation de traitement de pointe ou une maintenance prédictive, l'intégration de la vision industrielle et de la robotique est en fait le meilleur moyen pour eux de réagir. leurs robots dans les processus industriels. En donnant aux robots la capacité d'identifier et de traiter des objets dans l'espace, ils peuvent apporter aux robots de leur usine la même autonomie que celle de la technologie des voitures autonomes.
Certaines de ces applications existent aujourd'hui, mais uniquement pour des scénarios hautement raffinés ou des kits de développement de capteurs prêts à l'emploi provenant des principaux fabricants de robots industriels et d'équipements périphériques. Ceux-ci offrent un excellent point de départ pour intégrer davantage de robots dans des environnements à forte mixité, mais ils se limitent principalement à la sélection de cas d'utilisation et non de processus à valeur ajoutée, où les goulots d'étranglement de production sont les plus courants. En fin de compte, jusqu'à ce qu'un robot ait la capacité de générer lui-même un programme à partir de ce qu'il voit, il n'offrira que des améliorations incrémentielles dans des environnements très variés.
Faciliter l'accès à de nouvelles industries
En tant qu'intégrateur de robotique, vous n'avez peut-être pas vraiment le temps de générer de nouvelles solutions intégrant la vision 3D, la fusion de capteurs ou de nouveaux types d'offres plus élaborées. Beaucoup peuvent être très satisfaits de leur activité dans l'automobile et les industries similaires. Beaucoup d'autres peuvent être heureux d'entrer lentement dans davantage d'ateliers d'usinage et d'opérations à mélange élevé où la taille des lots est suffisamment importante pour justifier une solution robotique.
Cependant, pour les intégrateurs qui recherchent un moyen de déployer davantage de solutions robotiques dans des industries qui ne les ont pas encore vues et ne savent pas par où commencer, la technologie Shape-to-Motion™ d'Omnirobotic peut offrir un moyen. Cette technologie VOIT, PLANIFIE et EXÉCUTE les processus de pulvérisation industrielle en identifiant les objets selon leur forme - quel que soit leur positionnement dans l'espace - à l'aide de la vision 3D, puis utilise l'IA et le savoir-faire des processus pour générer un mouvement robotique unique pour chaque pièce en cours de traitement. Il peut ensuite exécuter le processus avec un degré élevé de raffinement, de qualité et une productivité accrue en travaillant avec les pilotes de mouvement de robots industriels existants.
Cette technologie permet finalement aux intégrateurs de robotique de gérer la mise en œuvre dans des scénarios très variés, qu'il s'agisse de l'aérospatiale, de l'équipement lourd, des principaux meubles et appareils électroménagers. Ce ne sont là que quelques-uns, mais pas tous, des scénarios dans lesquels les applications de revêtement peuvent bénéficier d'opérations robotiques plus améliorées et plus précises, tout en ayant simplement trop de types de pièces pour justifier le temps de programmation requis de l'une des solutions de programmation manuelle d'aujourd'hui.
Omnirobotic fournit une technologie d'auto-programmation pour les robots qui leur permet de voir, de planifier et d'exécuter des processus de pulvérisation et de finition industriels critiques. L'équipe d'Omnirobotic combine des décennies d'expérience avec de nouvelles capacités d'IA pour fournir cela grâce à ce qu'on appelle la technologie Shape-to-Motion™, qui génère des mouvements de robot uniques en temps réel pour chaque pièce et exigence spécifique. Voyez quel type de retour vous pouvez en tirer ici .
Robot industriel
- Quels robots de peinture industrielle fonctionnent le mieux ?
- Robot industriel
- Robots articulés :Guide du robot industriel le plus connu
- Types de robots industriels et leurs différentes utilisations
- Les 12 principales applications et utilisations des robots industriels
- Maintenance préventive des robots industriels
- 6 étapes pour une intégration réussie d'un robot industriel dans votre installation
- Équiper des robots industriels pour les environnements d'entrepôt extrêmes
- Top 3 des mythes sur l'intégration robotique industrielle