


Bras robotique Arduino IoT
Composants et fournitures
 |
| × | 1 | |||
| × | 5 |
Applications et services en ligne
 |
| |||
 |
|
À propos de ce projet
C'est mon premier bras robotique avec les caractéristiques suivantes :
- Robot 5DOF, en fait 4 si l'on exclut la pince
- le cerveau est un Arduino Yun avec des capacités IoT
- l'interface de contrôle est intégrée à l'application Blynk
- les cinématiques avant sont implémentées dans Matlab à l'aide de Robotics Toolbox
- une nouvelle bibliothèque que j'ai écrite qui réalise un mouvement fluide
Je suis très content du résultat. Par conséquent, je voudrais partager avec vous mon expérience et comment la construire.
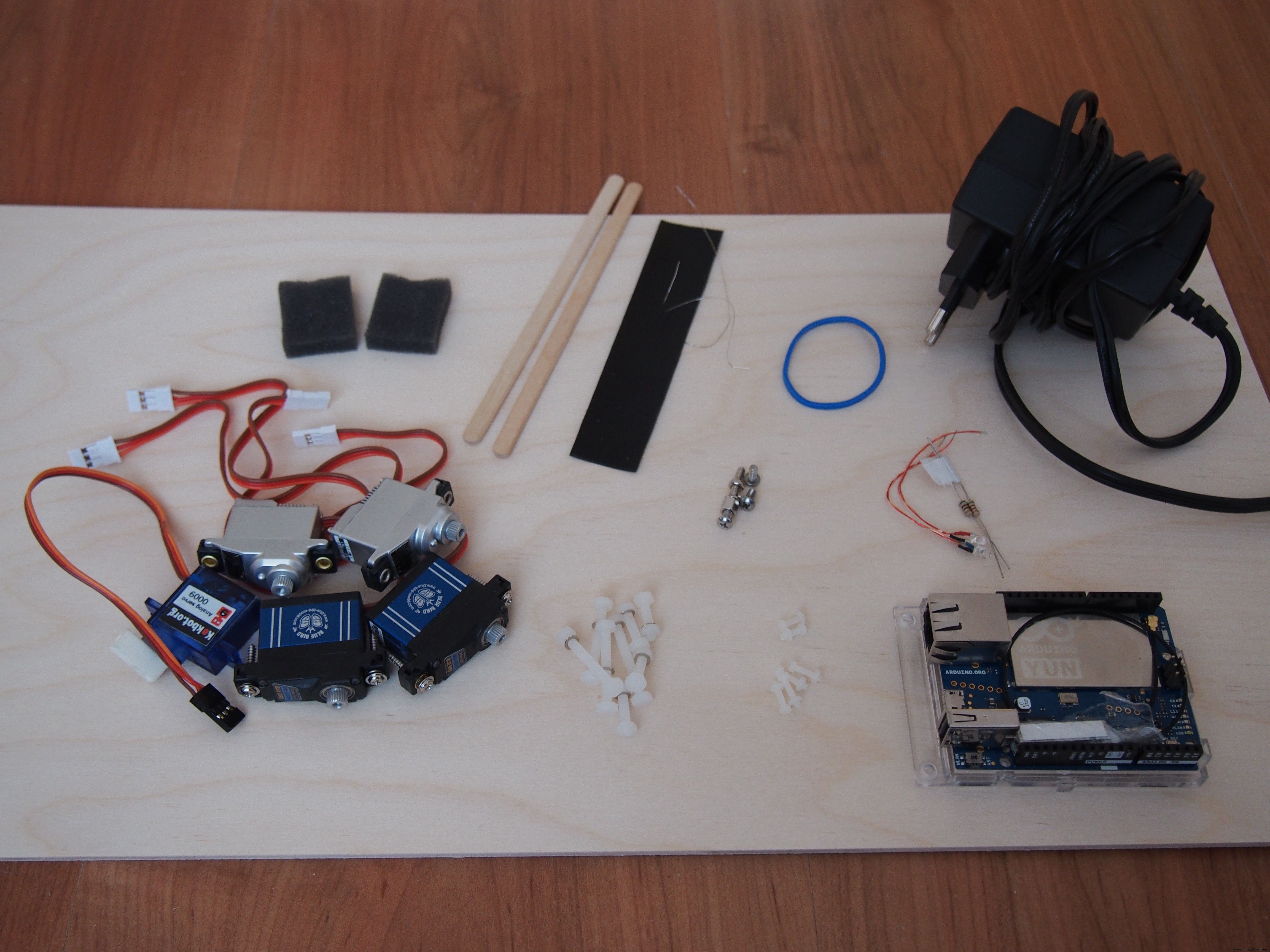
Composants et matériaux
Pour construire le robot dont vous avez besoin :
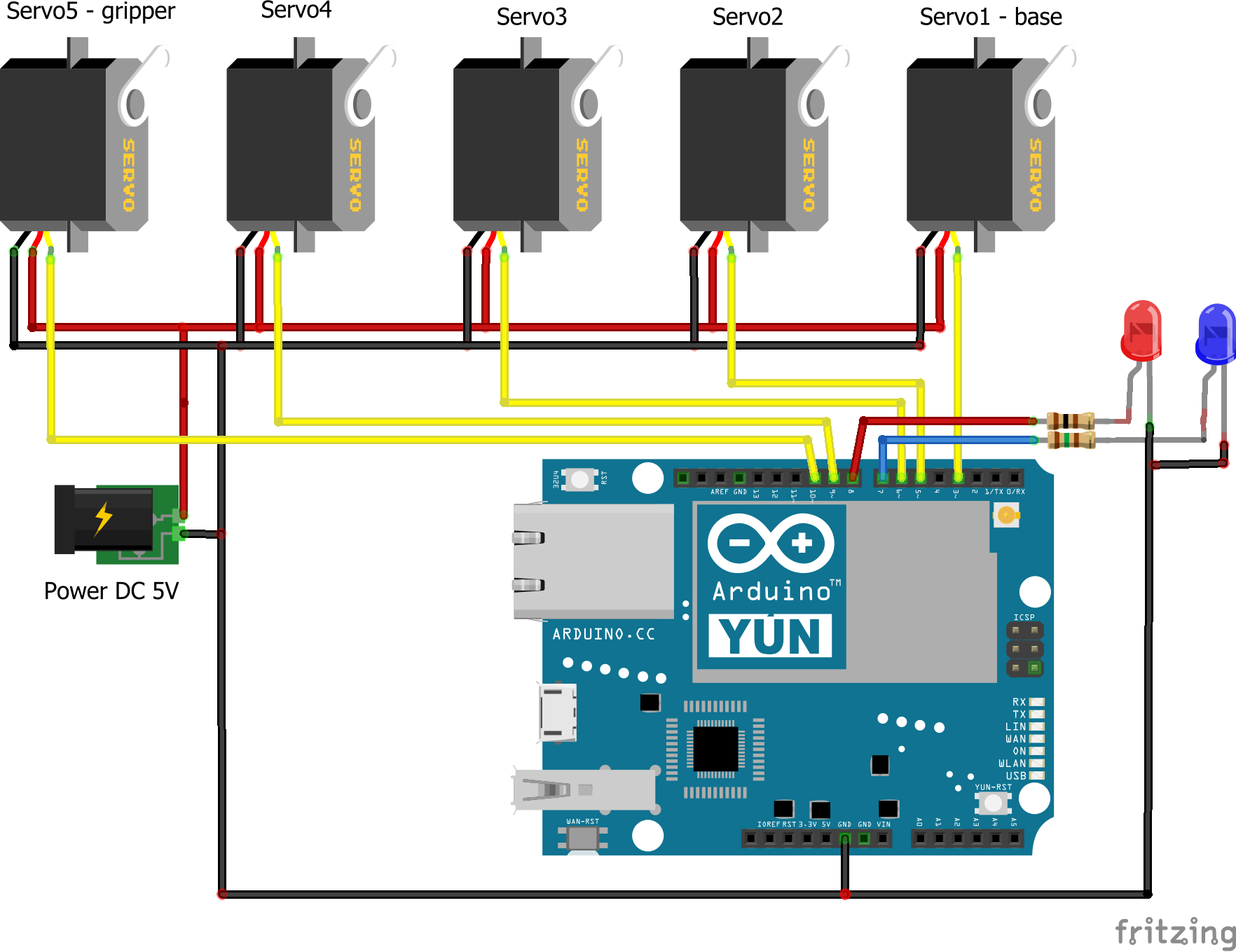
- 1 x Arduino Yun (ou n'importe quelle carte Arduino)
- 5 x servomoteurs
- 1 chargeur 5 V, min 2,5 A
- 2 x LED
- 2 résistances, 100 ohms (pour la led rouge) et 150 ohms (pour la led bleue), respectivement
- 2 x bâtons de mélange en bois
- 1 x fil métallique (ou similaire)
- 1 feuille de plastique (je l'ai prise dans une bouteille de gel douche)
- 1 x élastique
- 2 x petites éponges (voir coin supérieur gauche)
- 9 vis M3 en plastique
- 6 vis M2.5 en plastique
- 1 x plaque de bois 3mm (30cm x 50cm devrait être plus que suffisant)
- 1 x colle à bois
- il est temps de coder
Construire le robot
Pour construire le robot, commencez par mesurer la taille des servos et vérifier le couple des servos. Cela vous donnera une indication sur la taille des bras et éventuellement la taille du robot. Dans mon cas, j'ai commandé 2 micros servos différents à couple élevé :la première paire et la deuxième paire. Ceux-ci peuvent voyager jusqu'à 140 degrés même s'ils sont spécifiés pour voyager à 120 degrés. Cependant, je conseille d'acheter des servos à 180 degrés afin d'avoir plus d'angle de course.
Pour la pince, il n'y a pas besoin d'un servo à couple élevé. Le micro-servo le moins cher sur ebay peut faire le travail.
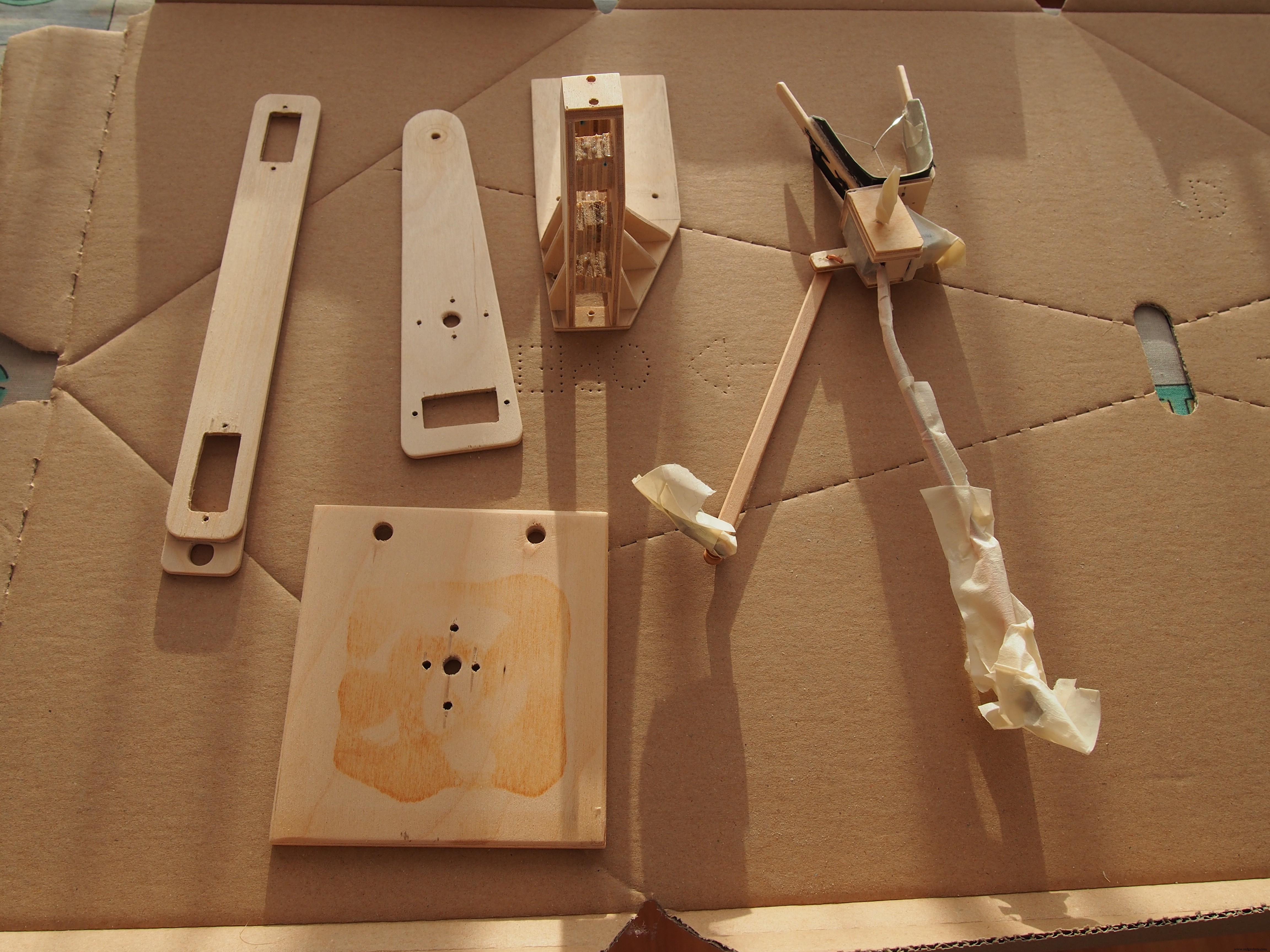
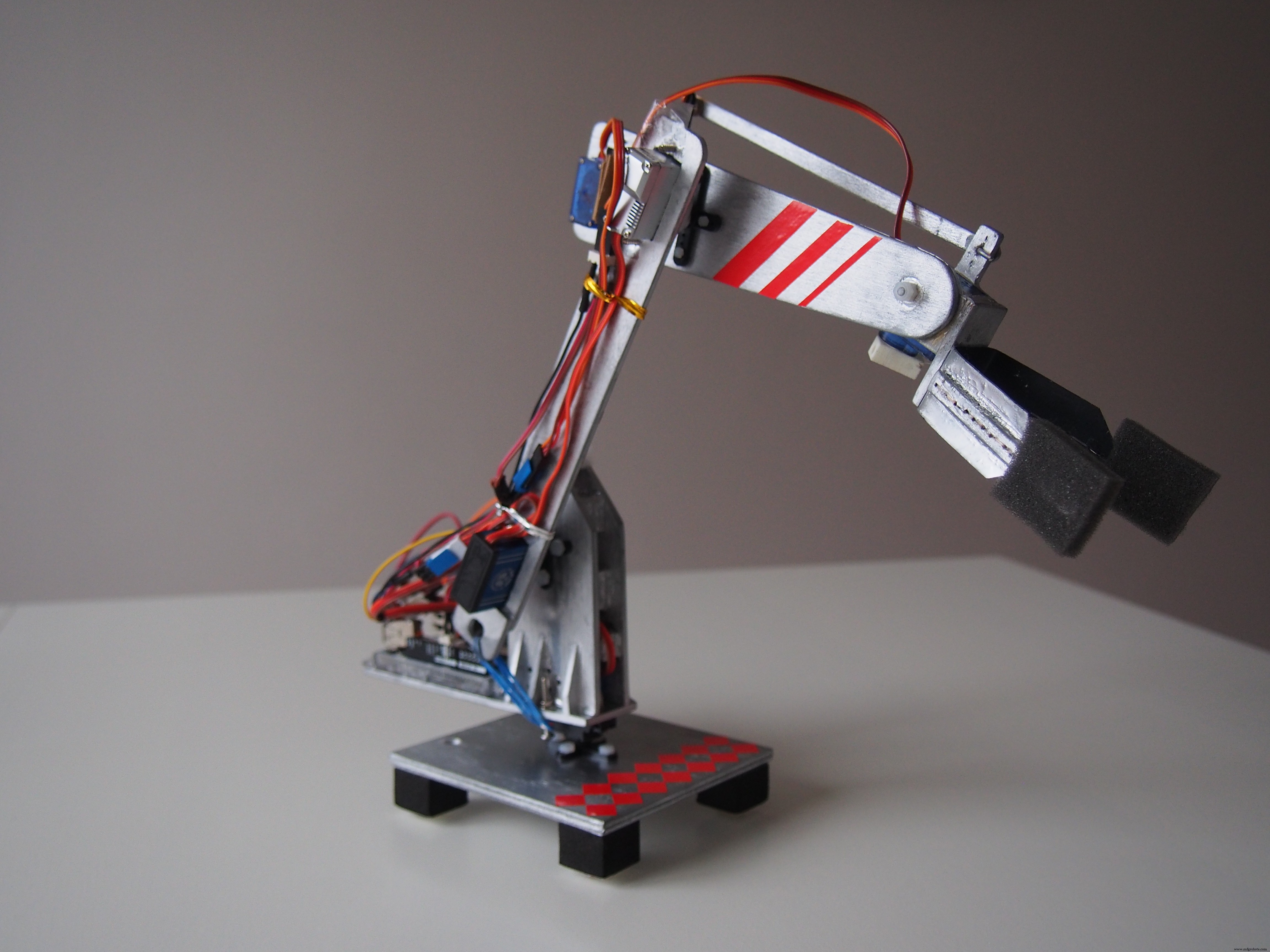
Commencez par couper les bras comme vous le voyez sur la photo 1. Ici, vous pouvez être créatif, il n'y a pas de design fixe, vous pouvez créer votre propre design. Ensuite, construisez la pince en utilisant un bâton mélangeur coupé en deux et la feuille de plastique comme ressort de rappel. Avec des fils connectés au côté intérieur, vous pouvez fermer et ouvrir la pince. Pour mon robot, j'ai utilisé une vis M3 pour faire pivoter la pince. Le pivotement de la pince est assuré par un servomoteur situé de l'autre côté du bras afin d'obtenir l'équilibre du poids. La puissance est transmise via un autre bâton mélangeur (voir Photo 2, haut du robot).
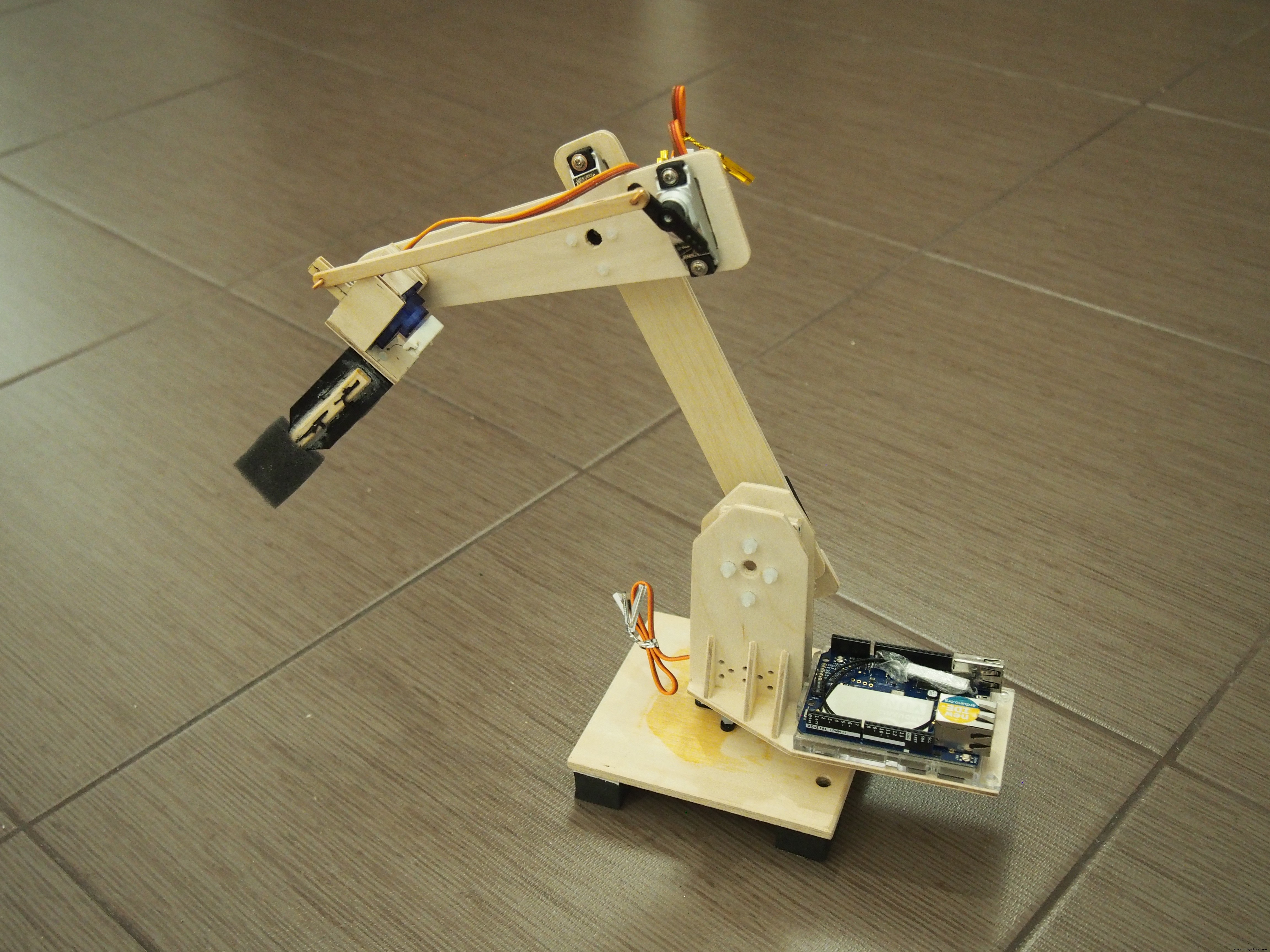
Ensuite, construisez la base et la plaque qui contient le servo de base et la carte Arduino Yun (ou une autre carte). Mettez le tout ensemble et vous devriez avoir quelque chose comme sur la photo 2.
Si vous voulez un design plus beau, poncez les composants en bois et peignez-les (comme sur la photo 3) avec votre couleur préférée. Pour mon robot, j'ai opté pour une couleur argentée (pour imiter le métal) avec des rayures rouges. Le résultat final est montré sur la photo 4.

Logiciel
Pour le logiciel, j'ai commencé par faire d'abord une interface en Blynk. Si vous n'avez jamais utilisé Blynk auparavant, veuillez consulter leur site Web pour savoir comment le faire. Devrait être très simple et direct.
Remarque : Si vous n'avez pas de carte pouvant se connecter à Internet, ne vous inquiétez pas, vous pouvez toujours utiliser Blynk avec une carte normale, par exemple Arduino Uno, via le port USB. Pour ce faire, lisez ici.
Ensuite, passons à l'IDE Arduino et écrivons du code. Pour votre commodité, j'ai joint le code, vous pouvez donc simplement l'utiliser :) Pour l'exécuter, vous devez procéder comme suit :
- Configurez la carte Arduino Yun.
- Installez la bibliothèque Blynk dans votre IDE Arduino en allant dans Sketch>Inclure la bibliothèque>Gérer les bibliothèques, recherchez Blynk et installez-le.
- Ajoutez la bibliothèque SimpleTimer dans un dossier portant le nom SimpleTimer à votre dossier de bibliothèque Arduino, généralement Arduino\libraries\
- Ajoutez la bibliothèque MotionGenerator que j'ai écrite, dans un dossier nommé MotionGenerator au dossier de la bibliothèque Arduino
- Compilez et téléchargez RobotArm_instructables.ino (Remarque :n'oubliez pas de mettre à jour votre jeton Blynk)
Remarque : La bibliothèque MotionGenerator est une solution analytique qui vous offrira de belles transitions en douceur d'un point à un autre. Il permet des limitations sur la vitesse et l'accélération maximales.
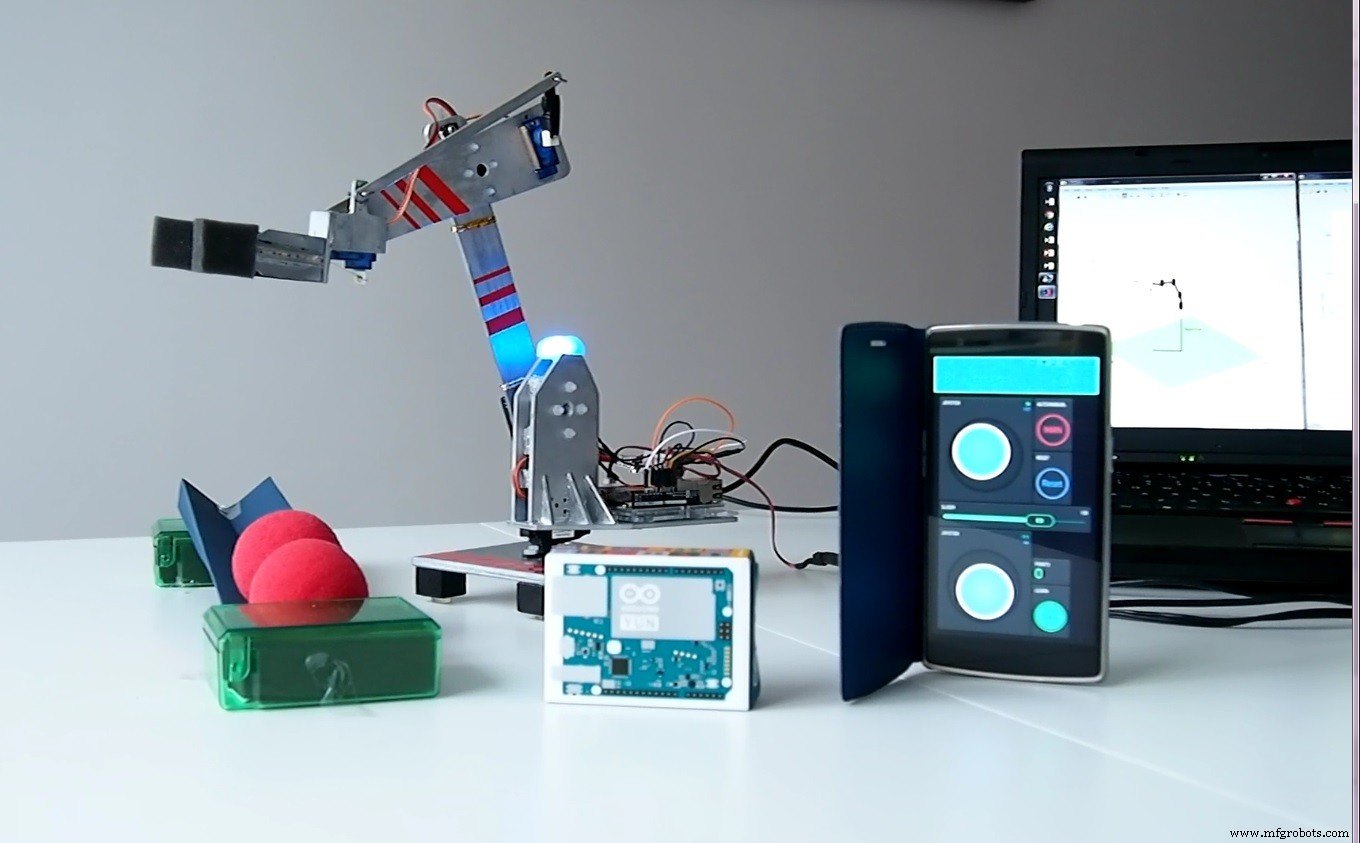

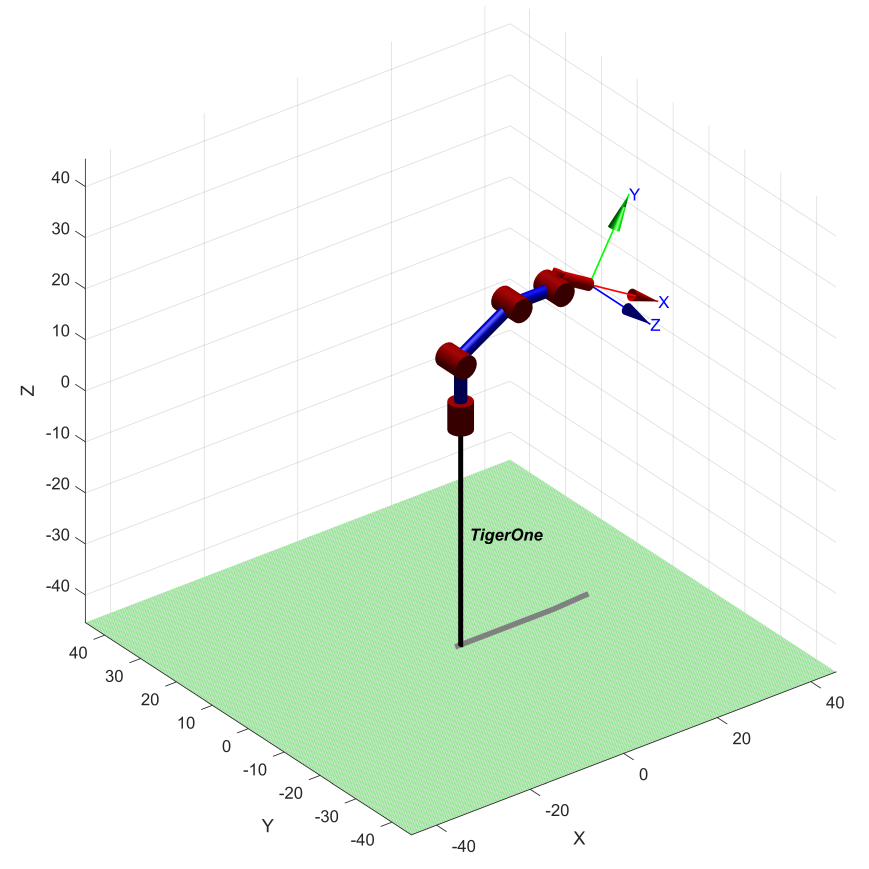
Facultatif (cinématique avant, voir photo 3 ci-dessus) : Pour cela, vous avez besoin de Matlab et de Robotics Toolbox. Si vous disposez de tous ces éléments, assurez-vous que votre robot est connecté à Blynk et connecté au port USB de votre ordinateur. Matlab collectera les informations de l'Arduino via la communication série. Assurez-vous donc de remplir le bon port COM dans le fichier MainScrip.m. Enfin, exécutez simplement MainScrip.m.
Remarque :la cinématique du robot est pour mon propre robot. Pour votre robot, les dimensions peuvent être différentes (n'hésitez pas à ajuster dans robotKinematicsFcn.m).
Code
- Fichiers sources
Fichiers sourcesC/C++
Archive zip contenant les fichiers du code source.Aucun aperçu (téléchargement uniquement).
Schémas
Processus de fabrication
- Makerarm :un bras robotique super cool pour les makers
- La carte Arduino cible l'IoT industriel
- Bras robotique :comment est-il fabriqué ?
- Moniteur de fréquence cardiaque utilisant l'IoT
- Utiliser l'IoT pour contrôler à distance un bras robotique
- Bras robotique Arduino imprimé en 3D
- Bras robotique contrôlé par Nunchuk (avec Arduino)
- Piscine Azure IoT
- Le bras robotique industriel - Un boom de la fabrication