


Boucles de contrôle :ouvertes ou fermées
 La boucle de contrôle de rétroaction est probablement l'outil le plus innovant et le plus fiable dans le domaine de l'ingénierie de contrôle. Les boucles de contrôle dans leur ensemble sont efficaces des outils pour déterminer les problèmes et les problèmes dans un système, atteindre des valeurs de consigne dans les processus et maintenir la stabilité d'un système. Il existe trois principaux types de systèmes de boucle de contrôle :en boucle fermée, en boucle ouverte et en boucle ouverte et fermée combinées. La boucle fermée repose davantage sur la rétroaction, contrairement à la boucle ouverte. Combined utilise à la fois la rétroaction et l'anticipation pour stabiliser un processus.
La boucle de contrôle de rétroaction est probablement l'outil le plus innovant et le plus fiable dans le domaine de l'ingénierie de contrôle. Les boucles de contrôle dans leur ensemble sont efficaces des outils pour déterminer les problèmes et les problèmes dans un système, atteindre des valeurs de consigne dans les processus et maintenir la stabilité d'un système. Il existe trois principaux types de systèmes de boucle de contrôle :en boucle fermée, en boucle ouverte et en boucle ouverte et fermée combinées. La boucle fermée repose davantage sur la rétroaction, contrairement à la boucle ouverte. Combined utilise à la fois la rétroaction et l'anticipation pour stabiliser un processus.
Le schéma suivant illustre l'ensemble de la boucle de contrôle de rétroaction :
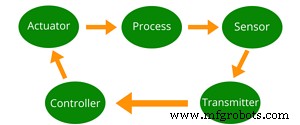
En divisant cela, nous obtenons :
- Le processus qui doit être contrôlé
- Un capteur qui mesure le paramètre physique du processus
- Un émetteur qui convertit les informations sensorielles via des signaux électroniques
- Un contrôleur qui compare le signal et la consigne
- Un actionneur qui effectue un effort correctif en réponse au signal envoyé par le contrôleur
Dans un système de contrôle en boucle fermée, la séquence est répétée jusqu'à ce que la consigne soit atteinte. Quelques exemples courants sont le thermostat pour la température du four ou le régulateur de vitesse dans une voiture. Mais cela ne signifie pas que toutes les opérations automatiques nécessitent une rétroaction pour fonctionner correctement. Les configurations en boucle ouverte, qui supposent que la séquence n'est nécessaire qu'une seule fois, peuvent servir plusieurs opérations sans avoir besoin de confirmations constantes par retour d'information.
Types de contrôle en boucle fermée
Contrôle continu en boucle fermée
Tous les processus en boucle fermée ne se ressemblent pas. Pour un processus de contrôle continu, la boucle de rétroaction maintient la valeur de la variable de contrôle définie par l'utilisateur, également appelée point de consigne. Le contrôleur effectue une simple soustraction de la dernière mesure sensorielle à la consigne. L'ampleur du résultat détermine l'effort correctif qui serait appliqué par le contrôleur, à travers l'actionneur.
Par exemple, une voiture dont le régulateur de vitesse est activé utiliserait le compteur de vitesse comme capteur pour mesurer sa vitesse. Si la vitesse est inférieure à la valeur définie, le contrôleur accélère la voiture en alimentant plus de carburant. Si la voiture roule trop vite, l'apport de carburant est diminué proportionnellement. Ce processus de mesure-décision-actionnement se poursuit jusqu'à ce que la vitesse de la voiture atteigne la consigne.
Contrôle discret en boucle fermée
Avec un contrôle continu en boucle fermée, la variable d'intérêt est mesurée à tout moment, mais avec des systèmes de contrôle discrets, un événement déclencheur se traduirait par la séquence mesure-décision-actionnement. Par exemple, les humains utilisent leurs yeux pour déterminer l'état de la lumière ambiante à l'extérieur avant de conduire et s'il faut ou non allumer les phares. Aucun autre ajustement n'est nécessaire jusqu'à un événement déclencheur tel qu'une forte couverture nuageuse ou le début du voyage suivant.
Les boucles de rétroaction discrètes sont beaucoup plus simples que les boucles continues car elles n'impliquent pas de surveillance continue ou de problèmes tels que des dépassements brusques. Des résultats instantanés sont obtenus lorsque les phares sont allumés par rapport aux résultats progressifs avec le régulateur de vitesse.
Contrôle en boucle ouverte
Comme mentionné précédemment, les contrôleurs en boucle ouverte supposent que la consigne sera atteinte en une seule fois et appliquent un seul effort de contrôle lorsque le déclenchement se produit. Ces contrôleurs peuvent également avoir la possibilité de mesurer les résultats. Par exemple, le moteur a-t-il démarré ou s'est-il arrêté ? Ces mesures sont principalement pour des raisons de sécurité et ne font pas partie de la séquence.
Parfois, un contrôleur en boucle fermée peut fonctionner comme un contrôleur en boucle ouverte en raison d'une panne de capteur ou d'une prise en charge manuelle par un opérateur. L'opérateur doit intervenir lorsqu'un contrôleur de rétroaction ne peut pas maintenir sa stabilité. Par exemple, un contrôleur de pression puissant peut ne pas être en mesure de compenser correctement une chute de la pression de ligne, ce qui entraîne des dépassements et des oscillations fréquents. Dans ces cas, l'opérateur doit prendre manuellement le contrôle pour stabiliser le système.
Il existe également plusieurs processus pour lesquels les commandes stables sont trop difficiles à configurer, nécessitant la prise en charge très fréquente d'opérateurs expérimentés. Les opérateurs peuvent utiliser leur expérience pour manipuler les entrées de processus et maintenir le point de consigne souhaité beaucoup plus rapidement que le contrôleur. Mais ce n'est pas la situation idéale avec l'utilisation de boucles de contrôle. Que se passerait-il donc si les contrôles en boucle ouverte et fermée étaient combinés ?
Combiner des contrôles en boucle ouverte et fermée
Le contrôle en boucle ouverte comporte l'inconvénient de l'imprécision, car la suppression de la partie de rétroaction supprime également la garantie de l'effort de contrôle faisant l'effort de contrôle nécessaire. Contrôles en boucle ouverte et fermée peuvent être combinés pour former une stratégie d'anticipation si la vitesse et la précision sont requises en parallèle.
Un contrôleur prédictif est construit sur un modèle mathématique du processus de sorte que tous les efforts de contrôle seraient similaires à ceux d'un ingénieur expérimenté fonctionnant en mode manuel. Il mesure les résultats des efforts d'une boucle ouverte initiale et applique des corrections supplémentaires pour éliminer les erreurs et atteindre le point de consigne. Ce type de contrôleur est pratique lorsque les bons capteurs sont disponibles pour mesurer une multitude de critères. Si son effet futur peut être prédit, le contrôleur peut alors prendre des mesures préventives pour s'assurer que l'erreur est supprimée dans un délai minimal.
Par exemple, si une voiture est équipée d'un radar ainsi que d'un régulateur de vitesse, elle pourrait voir une colline monter et accélérer pour compenser la force supplémentaire nécessaire pour gravir la colline. Sans le préavis, le régulateur de vitesse ne saurait jamais qu'il doit accélérer, ce qui conduit la boucle fermée à appliquer des efforts correctifs jusqu'à ce que la consigne soit à nouveau atteinte.
Chaque type de boucle de régulation a ses applications. Le contrôle en boucle ouverte est le mieux adapté aux situations où le point de consigne est réalisable en une seule fois. Les commandes en boucle fermée sont idéales pour les situations qui nécessitent des essais et des erreurs pour atteindre le point de consigne. Et le contrôle combiné en boucle ouverte et fermée nécessite des modèles mathématiques et parfois des capteurs pour fonctionner correctement. La gamme d'options permet aux opérateurs de choisir correctement la boucle de contrôle adaptée à leurs besoins.
Système de contrôle d'automatisation
- Boucles à verrouillage de phase
- Circuits de contrôle
- Neon A Shop Open/Closed Makerspace Sign sur Raspberry Pi 2 (El Paso, Texas)
- Open CV Robot
- Meilleurs moyens de dépanner les boucles d'automatisation et de contrôle des processus
- Avantages de la convergence du contrôle industriel
- Croissance du marché du contrôle basse tension
- Survivre à un projet de migration du système de contrôle
- Comprendre les panneaux de contrôle industriels