


Ajouter LiDAR à ADAS pour la sécurité des piétons
La plupart des véhicules neufs vendus aux États-Unis aujourd'hui incluent des systèmes avancés d'aide à la conduite (ADAS) équipés du freinage d'urgence automatique des piétons (PAEB) en tant que fonctionnalité standard ou optionnelle. Bien que l'ADAS à la pointe de la technologie ait amélioré la conduite sur autoroute et à grande vitesse, le besoin fondamental d'atténuation des collisions avec les piétons et les cyclistes est resté en grande partie sans réponse.
Plus de 6000 piétons sont tués chaque année dans des accidents liés à la circulation aux États-Unis, a rapporté la National Highway Traffic Safety Administration (NHTSA). Un rapport de la Governors Highway Safety Association a noté que 75 % de ces décès surviennent la nuit. L'utilisation d'ADAS basée sur des technologies de caméra et de radar s'est avérée insuffisante pour relever ce défi. Des tests indépendants menés par la NHTSA et l'American Automobile Association (AAA) révèlent que les systèmes PAEB ne parviennent souvent pas à protéger les piétons dans l'obscurité.
Tester le PAEB dans l'obscurité

Les systèmes PAEB pourraient sauver des milliers de vies chaque année en améliorant les performances dans l'obscurité. Entre 2009 et 2018, les décès de piétons ont augmenté de 53 %. De cette augmentation, 90% ont été causés par des accidents nocturnes, selon les rapports de l'Insurance Institute for Highway Safety (IIHS) et de la Governors Highway Safety Association. La NHTSA a rapporté qu'en 2018, 76 % des 6 283 piétons tués dans des accidents aux États-Unis se sont produits dans l'obscurité.
Les évaluations de l'AAA et de la NHTSA ont montré que les fonctionnalités PAEB échouent souvent à éviter les accidents la nuit. Le rapport de l'AAA indique qu'« il existe peu ou pas d'informations accessibles au public concernant les performances des systèmes de détection des piétons dans des conditions de faible luminosité. Sur la base des statistiques d'accidents de véhicules / piétons, cet environnement est particulièrement critique à évaluer. Ajouter que tester le PAEB dans des conditions sombres comblerait ce vide. "Bien que ce paramètre soit très difficile, il s'agit néanmoins d'un scénario de test raisonnable compte tenu du manque d'éclairage dans de nombreux environnements naturalistes."
AAA a constaté que dans un test de quatre véhicules, aucun n'a alerté le conducteur ou n'a automatiquement ralenti pour un piéton traversant la route dans l'obscurité. Sur la base de ces résultats, AAA conseille que "les conducteurs ne doivent pas compter sur l'assistance des systèmes de détection de piétons actuels pendant la conduite de nuit ou dans d'autres environnements à visibilité réduite". Concluant son analyse, le rapport d'AAA a noté que même si "le manuel du propriétaire de chaque véhicule d'essai indique que le système de détection des piétons intégré peut ne pas discerner les piétons la nuit ou par mauvais temps comme la pluie, la neige, le grésil ou le brouillard... il est irréfutable que l'assistance d'un système de détection de piétons serait bénéfique pendant les conditions nocturnes et pourrait éventuellement être le moment où le besoin est le plus grand. »
Cependant, l'examen des protocoles actuels employés par le programme d'évaluation des voitures neuves (NCAP) de la NHTSA, le programme européen d'évaluation des voitures neuves (Euro NCAP) et l'IIHS démontre que les performances dans des conditions nocturnes ne sont que rarement testées comme base pour les évaluations et les récompenses de sécurité des véhicules.
Velodyne LiDAR (San Jose, CA) propose donc que les organismes d'évaluation incluent dans leurs protocoles de test PAEB, des scénarios menés dans des conditions d'obscurité. Adopter cette approche garantira que les consommateurs de véhicules équipés de fonctionnalités PAEB comprennent les limites des performances de leur véhicule et encouragera les constructeurs automobiles à améliorer les fonctionnalités ADAS qui peuvent sauver des milliers de vies chaque année. Plus précisément, ces tests doivent être effectués avec un éclairement ambiant inférieur à un lux, en utilisant les feux de croisement du véhicule testé et sans l'aide de lampadaires.
Comparaison des systèmes LiDAR et caméra/radar PAEB
Les solutions PAEB basées sur LiDAR ont des atouts inhérents par rapport aux combinaisons caméra et radar.
Les caméras peuvent avoir une résolution très élevée, mais elles nécessitent généralement plusieurs modules et un traitement supplémentaire pour calculer les distances entre les objets et un véhicule. De plus, comme l'œil humain, les caméras fonctionnent relativement mal dans des conditions sombres. Un rapport du ministère des Transports (DOT) de 2018 indique que "les systèmes basés sur la vision sont plus capables [que les systèmes basés sur le radar] de détecter les personnes immobiles, mais sont limités à un fonctionnement à la lumière du jour dans des environnements bien éclairés."
Par rapport aux caméras, note le rapport du DOT, le radar fonctionne bien la nuit et peut fournir des mesures de distance. Mais le radar n'a pas une résolution suffisamment élevée pour percevoir l'emplacement précis d'un objet ou faire la distinction entre plusieurs objets proches les uns des autres. Le radar peut également ne pas détecter les objets immobiles ou se déplaçant lentement. En raison de ces lacunes, les fonctions PAEB basées sur des caméras et des radars ont du mal à protéger les piétons dans des conditions nocturnes.
L'imagerie thermique a parfois été proposée comme complément potentiel à la caméra et au radar dans les applications PAEB. Cependant, cette technologie présente ses propres faiblesses et ne répond pas adéquatement à celles des systèmes de caméras et de radars actuels. Comme pour les caméras optiques, la capacité d'un système de véhicule à détecter des objets avec des données de capteur thermique dépend de la capacité du capteur à percevoir et à transmettre correctement le contraste entre un objet et son environnement. En conséquence, les deux modalités de détection peuvent manquer des objets qui se fondent dans leur arrière-plan. Dans le cas de l'imagerie thermique, cela résulterait du mélange de caractéristiques thermiques similaires, plutôt que de couleurs similaires ou d'illusions d'optique, comme avec les caméras.
En revanche, LiDAR ne souffre d'aucun de ces inconvénients caractéristiques des caméras, radars et capteurs thermiques. LiDAR agit comme sa propre source de lumière, il fonctionne donc bien dans l'obscurité et à la lumière du jour. Il fournit également des données de mesure rapides et précises avec une résolution suffisamment élevée pour une détection précise en temps réel de l'espace libre tout en suivant plusieurs objets dans une scène.
Les solutions PAEB abordables basées sur LiDAR qui sont actuellement disponibles amélioreraient considérablement les performances dans toutes les conditions d'éclairage. Cela serait confirmé si les agences de réglementation et de test ajoutaient des tests sombres à leurs protocoles d'évaluation.
Test du système PAEB basé sur LiDAR par rapport à la technologie basée sur caméra et radar
Pour démontrer qu'il est possible d'améliorer les performances nocturnes du PAEB en mettant en œuvre des technologies facilement disponibles, Velodyne a testé son système PAEB basé sur LiDAR par rapport à un système PAEB hautement coté construit autour d'une caméra et d'un radar. Les tests ont été effectués à une vitesse contrôlée par le conducteur ciblant 30 mph sur une piste droite, une heure après le coucher du soleil, avec un éclairage ambiant inférieur à un lux.
Les deux véhicules d'essai avaient chacun leurs feux de croisement allumés pendant les essais. Les cibles factices stationnaires pour piétons enfants et adultes utilisées dans les tests étaient compatibles avec les protocoles de test actuels prescrits par des organisations telles que l'IIHS et l'Euro NCAP.
Les scénarios dans lesquels les véhicules ont été évalués comprenaient :
-
Croisement adulte à 50 % de chevauchement (au centre de la largeur du véhicule d'essai)
-
Passage adulte à 25 % de chevauchement
-
Croisement de l'enfant à 50 % de chevauchement
-
Passage enfant à 25 %, adulte à 75 %, 10 pieds derrière l'enfant
-
Adulte traversant au coin côté conducteur
-
Adulte tombé à 50 % de chevauchement
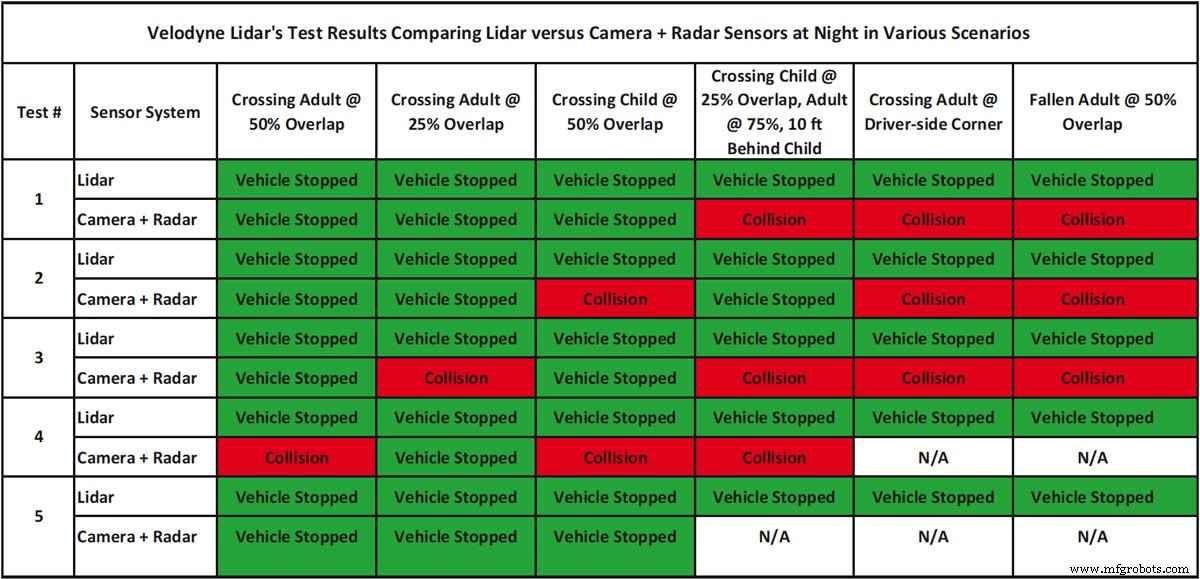
Velodyne a testé les deux véhicules cinq fois dans chaque scénario, ou jusqu'à ce que le véhicule entre en collision avec la cible trois fois, afin de minimiser les dommages aux cibles et aux véhicules.
Les résultats des tests nocturnes confirment les conclusions de l'AAA et de la NHTSA selon lesquelles les caméras et les radars
Les systèmes PAEB échouent fréquemment dans des conditions sombres. Les tests ont révélé que le taux d'échec était particulièrement évident dans les scénarios impliquant un enfant, plusieurs piétons, un adulte au coin du véhicule ou un adulte tombé devant le véhicule.
En revanche, le système PAEB basé sur Velodyne LiDAR, équipé du capteur Velarray H800 de Velodyne et du logiciel Vella™, s'est arrêté avec succès à temps pour éviter un crash cinq fois sur cinq pour chaque scénario testé. Ces composants matériels et logiciels sont développés pour répondre aux exigences de sécurité fonctionnelle automobile définies dans la norme ISO-26262. Combinant Vella et Velarray, la solution PAEB de Velodyne est conçue pour la conduite urbaine, suburbaine et sur autoroute jusqu'à 80 mph.
Conclusion
Étant donné que les conditions nocturnes sombres s'avèrent dangereuses pour les piétons, Velodyne propose que les organismes d'évaluation des véhicules étendent les tests PAEB pour inclure des conditions d'éclairage ambiant inférieures à un lux. Les tests effectués par AAA et NHTSA démontrent que les performances nocturnes représentent une opportunité majeure d'amélioration des systèmes PAEB actuels. Les tests montrent qu'une solution basée sur LiDAR est efficace et prête à être mise en œuvre.
Cet article a été écrit par David Hall, fondateur et président exécutif du conseil d'administration, Velodyne LiDAR (San Jose, CA). Pour plus d'informations, contactez M. Hall à Cette adresse e-mail est protégée contre les robots spammeurs. Vous devez activer Javascript pour le voir. ou visitez ici .
Capteur
- Pourquoi l'excellence en matière de fiabilité est impérative pour la sécurité
- Conseils de sécurité sur le lieu de travail pour les machinistes CNC
- Développer une nouvelle ère pour une sécurité alimentaire plus intelligente
- Conseils de sécurité pour le déplacement de machinerie lourde
- Rappels de sécurité pour l'utilisation des chariots élévateurs
- 5 conseils de sécurité pour la préparation d'équipement lourd
- Arrêtez ! 3 conseils pour la sécurité des ponts roulants
- 3 conseils d'entretien de sécurité pour les palans à chaîne de grue
- 7 conseils de sécurité intelligents pour les plates-formes offshore