


Caméras hyperspectrales et qualité des données
L'imagerie hyperspectrale combine à la fois l'imagerie et la spectroscopie. Il existe de nombreuses architectures optiques différentes utilisées pour créer des systèmes hyperspectraux, mais l'objectif final est le même :créer une image dans laquelle chaque pixel de l'image contient des informations provenant de nombreuses bandes spectrales (de nombreuses couleurs ou longueurs d'onde différentes).
Faire de bons systèmes hyperspectraux n'est pas facile, mais, si vous n'avez que la qualité à l'esprit, votre priorité absolue devrait être la fidélité spectrale de chaque pixel - c'est-à-dire que le spectre capturé par un pixel est une représentation physique réelle de la scène imagée par ce pixel spécifique . Il existe de nombreux paramètres de qualité clés qui influencent la fidélité spectrale d'un système hyperspectral. L'influence sur la fidélité spectrale des différents paramètres de qualité de clé dépend de nombreux facteurs mais, en général, les paramètres les plus importants sont :
-
Erreur de repérage spatial
-
Mauvais enregistrement spectral
-
Lumière parasite
-
F#
-
Fonction de réponse spectrale
-
Paramètres du détecteur
-
Stabilité environnementale
Pour évaluer les performances d'un système hyperspectral, nous devons introduire le terme fonction d'étalement de points (PSF). Il s'agit de la forme de la courbe d'intensité de l'énergie qui frappe le détecteur à travers l'optique à partir d'une source ponctuelle.
Idéalement, dans un système hyperspectral pushbroom, l'échantillonnage spatial est le même pour toutes les bandes. En réalité, cela n'est jamais vrai et entraîne un mauvais repérage spatial.
Pour une position dans le FOV, la forme, la taille et la position du centre de gravité de la PSF doivent être les mêmes dans toutes les bandes. Un objectif de conception est de rendre la forme et la taille de la PSF aussi similaires que possible pour toutes les positions dans le FOV. Dans les applications réelles, le mauvais repérage spatial lui-même 1 et les différentes sources à l'origine du mauvais repérage spatial 2 sont d'une grande importance, et on peut montrer comment les différences de sa gravité 3 peut compromettre les résultats du traitement des données.
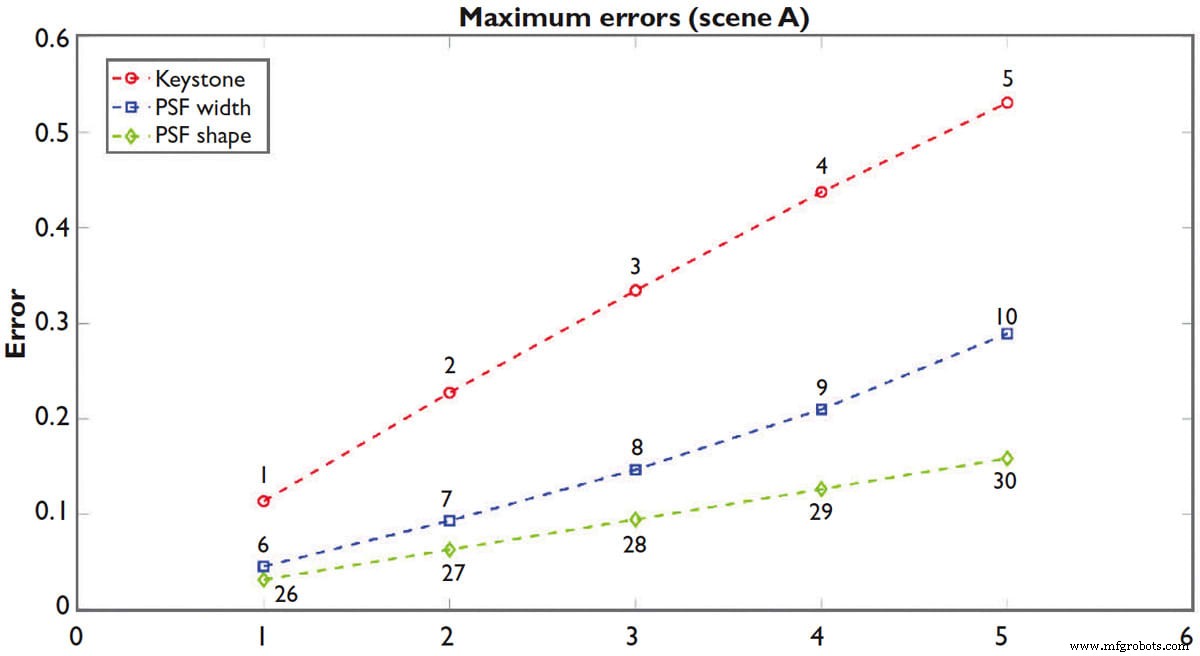
Le défaut de repérage spectral est également très important pour la fidélité spectrale d'un système hyperspectral. Comme pour le mauvais repérage spatial, la forme, la taille et la position de la PSF spectrale sont importantes. Pour éviter le crénelage spectral, la largeur de la PSF doit être maintenue proche de deux bandes spectrales, mais dans de nombreuses situations, des optiques plus nettes que cela sont préférées.
Il existe de nombreuses raisons de créer des optiques nettes par pixel et par bande. Pour tout détecteur donné, avec un pas de détecteur donné, le spectromètre imageur produira toujours plus d'informations avec une optique nette. D'autre part, échantillonner la PSF avec plus d'un pixel donne plus d'informations sur la PSF, mais pour un détecteur donné, cela réduira la résolution du système. Tout système optique donné produira toujours plus d'informations, plus vous avez de pixels par fonction d'étalement de points (PSF) 4 .

Il existe de nombreux compromis lors du choix du système à fabriquer ou, pour l'utilisateur, des systèmes à acheter. La netteté de l'optique en fait partie.
Un autre paramètre clé de la qualité est la lumière parasite du système optique. En général, la lumière parasite est la lumière qui atteint le détecteur à partir d'endroits où elle ne devrait pas. Cela peut être dû aux réflexions à l'intérieur de l'optique, à la diffusion des surfaces optiques, aux réflexions sur les surfaces mécaniques, etc. L'effet de lumière parasite peut également être différent pour différentes gammes spectrales. Il n'y a pas de norme industrielle sur la façon de mesurer la lumière parasite des systèmes hyperspectraux aujourd'hui et différents fournisseurs le font différemment.
La capacité de collecte de lumière de l'optique est généralement un paramètre très important (fa# bas). Plus il y a de pixels spatiaux et de bandes spectrales dans le système, moins il y a de lumière qui atteint chaque pixel/bande. Cela signifie qu'un système d'imagerie hyperspectrale à haute résolution doit être très sensible à la lumière. Ce paramètre peut varier en importance selon la plateforme. Si le système hyperspectral est déployé sur un avion ou dans un environnement industriel, la vitesse est généralement un paramètre important et un faible F # est alors très important pour obtenir un bon rapport signal sur bruit (SNR) pour toute la gamme spectrale. À l'inverse, les applications de laboratoire peuvent généralement collecter plus de lumière en utilisant des taux de capture d'image plus lents et en intégrant plus longtemps, ce qui permet une plus grande flexibilité sur l'ouverture.

Un SNR élevé pour toute la gamme spectrale est un paramètre très important du système hyperspectral et la hauteur du SNR dépend de la fonction de réponse spectrale de l'ensemble du système. Le SNR de crête spécifie uniquement le SNR maximum d'une bande proche de la saturation et, par conséquent, ne donne pas toute l'histoire. Il faudrait également savoir quelle est l'efficacité quantique totale de l'ensemble du système en fonction de la longueur d'onde. Pour fournir des informations utiles, la courbe SNR doit être spécifiée pour une luminance d'entrée donnée et un temps d'intégration/exposition donné (et opérationnellement réaliste/pertinent).
Le détecteur est une partie importante des systèmes hyperspectraux et, dans de nombreux cas, définit l'objectif de conception des systèmes optiques. La gamme spectrale SWIR (900-2500nm) a un nombre très limité de détecteurs disponibles et le prix augmente considérablement avec l'augmentation du nombre de pixels du détecteur. Il s'agit d'un scénario où l'optique est conçue pour le détecteur et généralement conçue pour être aussi nette que possible.
Pour la gamme VNIR (400-1000 nm), de nombreux détecteurs sont disponibles et le détecteur qui convient le mieux au système optique peut être choisi. Pour les gammes VNIR et SWIR, de nombreux paramètres du détecteur sont d'une grande importance. Il s'agit de la pleine capacité du puits, du bruit de fond, des modes de lecture, de la vitesse de lecture, du pas des pixels, de l'efficacité quantique en fonction de la longueur d'onde, etc. Le marché des détecteurs est en constante évolution, et il est important pour les fabricants d'hyperspectraux de suivre le marché des détecteurs pour intégrer les meilleurs détecteurs disponibles.

Les procédures d'étalonnage et les normes utilisées (y compris les précisions) doivent être disponibles pour les utilisateurs et avoir un étalonnage radiométrique traçable aux normes NIST ou PTB (ou similaires) est donc très important.
Tout système hyperspectral doit maintenir un étalonnage radiométrique et spectral stable et précis en dehors d'un environnement contrôlé. Il est inutile d'avoir un système parfaitement calibré en sortie d'usine s'il n'est pas stable et valide après le transport et pendant les opérations. Cela signifie que l'étalonnage spectral, radiométrique et géométrique doit être stable à différentes températures, pressions et sous fortes vibrations, afin de garantir que le système fournira des résultats reproductibles et fiables dans des conditions exigeantes, telles que les opérations UAV. 5, 6

Il est très difficile de discriminer différents systèmes hyperspectraux à partir des fiches techniques de haut niveau des fournisseurs. Lors de la comparaison de systèmes de différents fabricants (ou de différents modèles du même fabricant), un rapport détaillé spécifiant les paramètres susmentionnés pour ce modèle de caméra particulier doit être fourni par le fournisseur. De plus, il est conseillé de demander des exemples de données d'une scène pertinente pour l'application de l'utilisateur.
Il y a actuellement une action pour faire une norme commune pour caractériser les caméras hyperspectrales, organisée par IEEE 7 . HySpex soutient et est fortement impliqué dans ce groupe, visant à rendre les offres plus transparentes pour les utilisateurs finaux de systèmes d'imagerie hyperspectrale.
Cet article a été écrit par Trond Løke, PDG, Norsk Elektro Optikk, AS (Oslo, Norvège). Pour plus d'informations, contactez Cette adresse e-mail est protégée contre les robots spammeurs. Vous devez activer le JavaScript pour la voir., ou visitez ici .
Références
- https://www.spiedigitallibrary.org/conference-proceedings-of-spie/8706/1/Resampling-in-hyperspectral-cameras-as-an-alternative-to-correcting-keystone/10.1117/12.2015491.short
- https://www.spiedigitallibrary.org/journals/Optical-Engineering/volume-59/issue-08/084103/Spatial-misregistration-in-hyperspectral-cameras-lab-characterization-and-impact/10.1117/1 .OE.59.8.084103.full?SSO=1
- https://www.hyspex.com/keystone/
- https://www.hyspex.com/sharp_optics_many_pixels/
- https://www.hyspex.com/scientific_grade_uav/
- https://www.hyspex.com/quality_vs620/
- https://standards.ieee.org/project/4001.html
Capteur
- Termes et concepts de la mémoire numérique
- Créer une IA responsable et digne de confiance
- Le système utilise des caméras de smartphone ou d'ordinateur pour mesurer la santé
- La fibre programmable fournit de l'énergie et transmet des données
- Le système de vision voit à travers les nuages et le brouillard
- Le système aide les drones à détecter et à éviter les lignes électriques
- « Stéthoscope » surveille la qualité et la fonctionnalité de la machine
- Système de caractérisation des circuits et des matériaux à microruban
- La caméra 3D fusionne les données de profondeur et spectrales