


5 façons expertes de programmer un robot FANUC
Vous avez décidé qu'un robot FANUC est le meilleur choix pour l'application que vous avez choisie.
Mais, quelle est la meilleure façon de programmer un FANUC ?
Avez-vous vraiment le choix ou devez-vous utiliser l'option par défaut fournie par le fabricant ?
Avec ses robots jaune vif distinctifs, le fabricant de robots japonais FANUC est un choix populaire pour les personnes qui cherchent à ajouter l'automatisation robotique à leur entreprise.
Vous voulez vous assurer de tirer le meilleur parti du robot que vous avez choisi… et cela signifie choisir la meilleure méthode de programmation.
Pourquoi la manière par défaut de programmer un FANUC est restrictive
Vous pouvez supposer que vous devez utiliser la méthode de programmation par défaut fournie par FANUC. C'est une hypothèse courante; il est certainement vrai que de nombreuses personnes utilisent la méthode par défaut pour programmer leurs robots FANUC.
Il existe 2 méthodes de programmation par défaut avec un robot FANUC.
Ce sont :
- TP — Il s'agit du langage utilisé par les pendentifs d'apprentissage FANUC. Ils sont modifiables par le pendentif d'apprentissage et stockés sous forme de fichier binaire.
- Karel — Il s'agit d'un langage de programmation dérivé de Pascal (comme le sont de nombreux langages de robots industriels). Cela peut être utilisé pour programmer le robot à l'aide d'un éditeur de texte.
Si vous ou quelqu'un de votre équipe avez de l'expérience en programmation Karel, ou si vous avez de l'expérience avec les pendentifs d'apprentissage FANUC, ces méthodes de programmation pourraient être une option viable pour vous.

Cependant, les méthodes par défaut de programmation des robots sont souvent beaucoup plus difficiles à utiliser qu'elles ne le devraient. Ils manquent également la fonctionnalité puissante qui vient avec d'autres méthodes de programmation.
Vous pourriez manquer une programmation plus intuitive et puissante si vous optez simplement pour l'option par défaut.
5 méthodes expertes pour programmer un robot FANUC
La meilleure façon de programmer un robot est celle qui utilise au maximum vos compétences existantes. Celui qui vous permet également d'accéder à toutes les fonctionnalités dont vous avez besoin du robot.
Voici 5 excellentes façons de programmer votre robot FANUC ; façons d'utiliser au mieux vos compétences et les capacités du robot :
1. Avec le pendentif d'enseignement
Bien sûr, la manière par défaut de programmer un robot est largement utilisée par les experts en programmation FANUC. Le pendentif d'apprentissage fourni avec le robot vous permettra d'accéder à de nombreux aspects de ses fonctionnalités de base.
Enseigner la programmation pendante implique beaucoup de travail; en appuyant sur un bouton, en naviguant dans les menus et en poussant le robot vers la position souhaitée à l'œil nu (une technique connue sous le nom de "jogging"). La création d'un programme d'une taille et d'une complexité raisonnables est un long processus. Il s'agit d'un processus tout aussi laborieux pour apporter des modifications au programme ultérieurement.
Enseigner la programmation du pendentif peut être puissant entre de bonnes mains. Cependant, le problème majeur est qu'il s'agit d'une méthode de programmation en ligne qui prend beaucoup de temps. Cela signifie que le robot doit être mis hors service pour le reprogrammer, ce qui dégrade sa productivité.
2. Avec la programmation hors ligne basée sur du texte
Vous pouvez réduire les effets négatifs de la programmation en ligne en utilisant plutôt la programmation hors ligne avec votre robot FANUC. Cela signifie que vous créez le programme sur un ordinateur. Vous pouvez ensuite le télécharger sur le contrôleur du robot lorsqu'il est terminé.
La forme la plus rudimentaire de programmation hors ligne consiste à coder le programme dans un éditeur de texte; en utilisant le langage de programmation Karel de FANUC. Cependant, cela nécessite que vous ayez beaucoup d'expérience dans la programmation de robots FANUC. Il vous manque un moyen de déboguer le programme au fur et à mesure. Par conséquent, la phase de débogage sur le robot physique sera plus longue et entraînera des retards similaires à la programmation en ligne.
3. Avec programmation graphique hors ligne
Une meilleure façon de programmer votre robot FANUC hors ligne consiste à utiliser un logiciel de programmation hors ligne dédié. Cela vous permet de créer et de déboguer le programme du robot. Vous pouvez le faire à l'aide d'un simulateur graphique avant d'avoir à retirer le robot de la production.
Bien sûr, certains outils de programmation hors ligne sont plus faciles à utiliser que d'autres. Par exemple, RoboDK est un logiciel de programmation et de simulation hors ligne que tout le monde peut utiliser, même sans expérience en robotique.
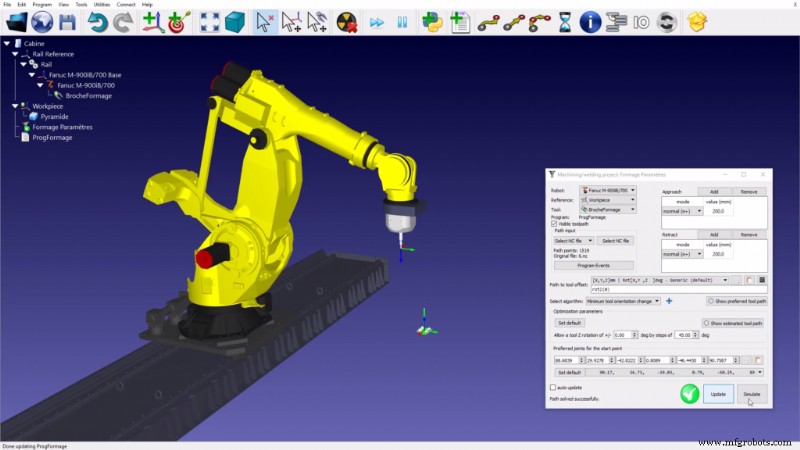
RoboDK fournit une interface graphique intuitive et apporte des fonctionnalités supplémentaires à la programmation de votre robot. Ceux-ci ne sont pas disponibles avec les méthodes conventionnelles telles que; assistant d'usinage dédié, capacité d'impression 3D et bien plus encore.
4. Avec votre langage de programmation préféré
Si vous êtes un programmeur expérimenté mais que vous n'avez pas beaucoup d'expérience spécifique avec les FANUC ou la robotique, vous vous demandez peut-être si vous pouvez programmer votre robot en utilisant votre langage préféré.
Dans le passé, cela aurait été difficile car cela aurait impliqué de créer des bibliothèques d'encapsulation et éventuellement des bibliothèques de communication réseau pour s'interfacer avec le contrôleur du robot. Mais maintenant, c'est à la fois possible et facile.
Avec RoboDK, vous pouvez utiliser l'un des nombreux langages de programmation de haut niveau pour programmer votre FANUC. Vous pouvez tester le programme hors ligne dans le simulateur avant de le télécharger sur le robot.
5. Avec une sonde portable
Les quatre méthodes précédentes impliquent au moins une certaine compréhension de la géométrie et de la programmation du robot. Même avec un logiciel graphique hors ligne, où vous pouvez faire glisser le robot dans la simulation graphique. Vous devez toujours réfléchir à la relation entre l'environnement simulé et l'environnement réel.
Cela étant dit, il existe une autre façon experte de programmer un robot FANUC qui est encore plus facile à utiliser que tout le reste.
Avec RoboDK TwinTrack, vous pouvez créer le programme simplement en traçant le mouvement souhaité du robot à l'aide d'une sonde portable. Le robot rejoue ensuite ce mouvement exact. TwinTrack est également compatible avec la programmation hors ligne, il n'a donc pas besoin d'impacter la production du robot.
Quelle est la meilleure façon de programmer votre robot FANUC ?
Alors, laquelle de ces méthodes de programmation vous conviendra le mieux ?
Comme mentionné, la meilleure méthode de programmation est celle qui utilise au mieux vos compétences existantes en tant que programmeur et vous permet d'accéder à la plupart des capacités du robot.
Bien sûr, la méthode par défaut fournie avec les robots FANUC peut répondre à ces critères.
Avec les autres options répertoriées dans cet article, vous pouvez accéder plus facilement à des fonctionnalités plus puissantes. Vous n'avez pas besoin d'appuyer sans fin sur les boutons du pendentif d'apprentissage du robot ou de vous attacher avec le langage de programmation Karel.
Si vous souhaitez essayer de programmer votre FANUC avec RoboDK, vous pouvez obtenir une version d'essai gratuite sur la page de téléchargement de RoboDK.
Pour plus d'instructions sur la programmation d'un robot FANUC avec RoboDK, consultez notre page de documentation dédiée.
Quelles difficultés rencontrez-vous pour programmer des robots FANUC ? Dites-le nous dans les commentaires ci-dessous ou rejoignez la discussion sur LinkedIn, Twitter, Facebook, Instagram ou sur le forum RoboDK.
Robot industriel
- Programmation du microprocesseur
- 5 étapes pour utiliser la programmation hors ligne avec un robot FANUC
- Programmation de robots CNC en 7 étapes faciles
- Les 11 bases de programmation de robot les plus utiles
- Programmation de robots industriels pour débutants
- De nouvelles façons d'automatiser avec la robotique en 2022
- Le marché des robots :Fanuc Robotics
- Robot d'enduction Fanuc :le P-250iA
- Le robot de peinture Fanuc P-50iB