


AirOwl - Sachez ce que vous respirez !
Composants et fournitures
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 10 | |||
 |
| × | 3 |
Applications et services en ligne
 |
| |||
 |
|
À propos de ce projet
AirOwl est l'appareil de surveillance de la qualité de l'air en temps réel. Il est utilisé pour surveiller la qualité de l'air et récupère les données du capteur et donne une sortie sur l'application Blynk à l'aide du BLE d'Arduino/Genuino 101. Un projet qui peut nous aider à savoir ce que nous respirons !
Les activités humaines affectent l'environnement. Nous avons donc décidé de créer un appareil qui aide à connaître l'environnement et à prendre des mesures en fonction de celui-ci.
L'image ci-dessous est l'image de l'AirOwl fonctionnant sur arduino 101.
La qualité de l'air peut être connue à travers 3 facteurs :-
1) Application Blynk (BLE)

2) Couleur des yeux d'Airowl

Si la couleur des yeux est verte, vous êtes dans un environnement plus sûr.
si la couleur des yeux est bleue, faites attention.
si la couleur des yeux est rouge, il y a danger.
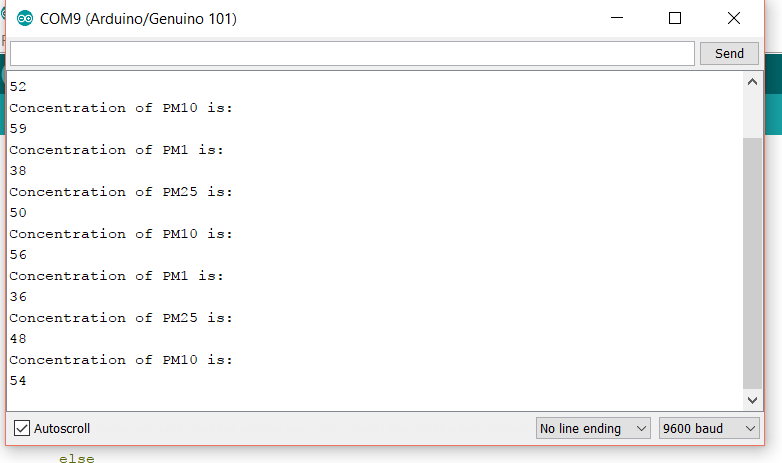
3) Moniteur série
Pour les schémas et la conception de l'Airowl, veuillez visiter :-
https://github.com/anithp/AirOwl_Genuino101
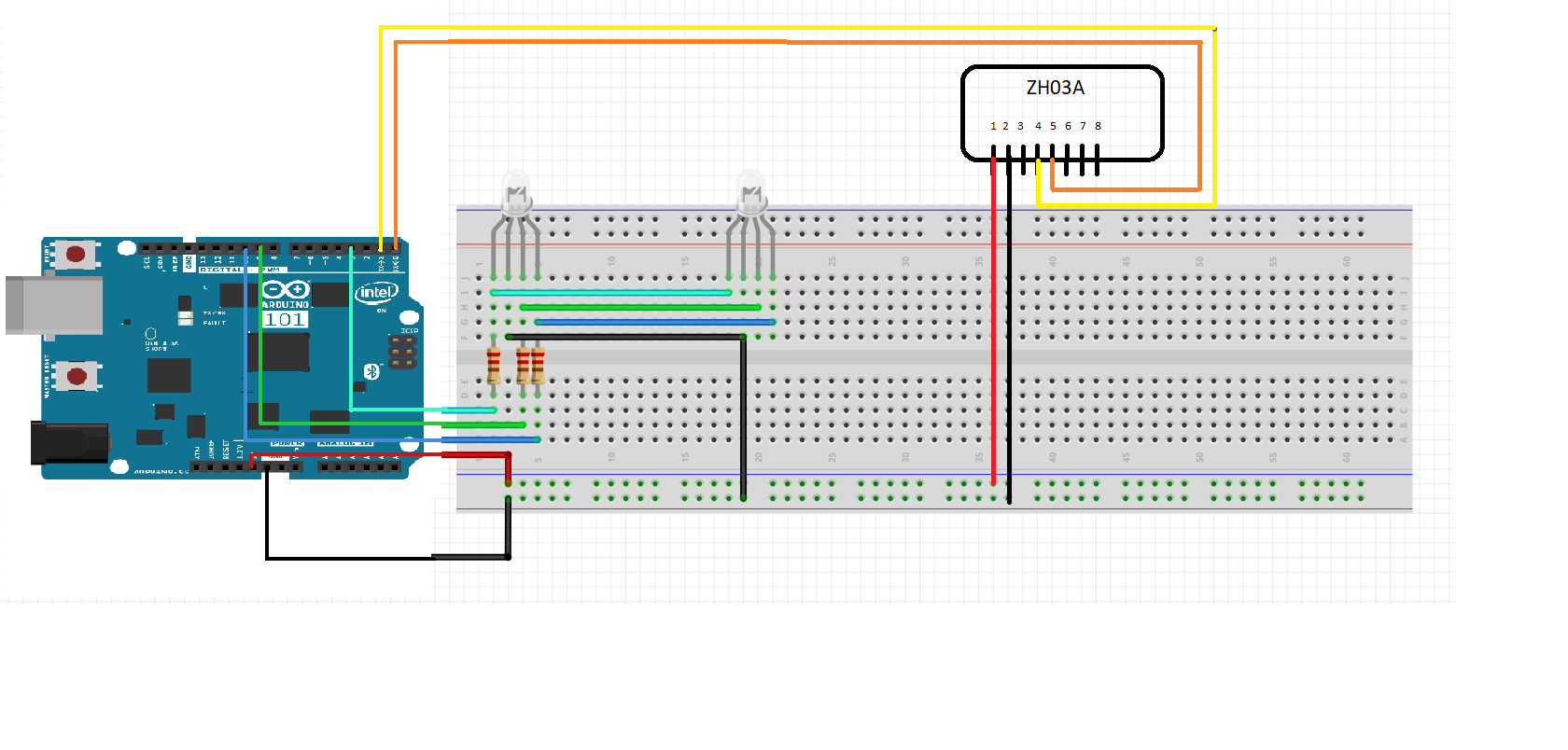
Après avoir parcouru les schémas, connectez le circuit.
Un schéma de base du projet est présenté ci-dessous.
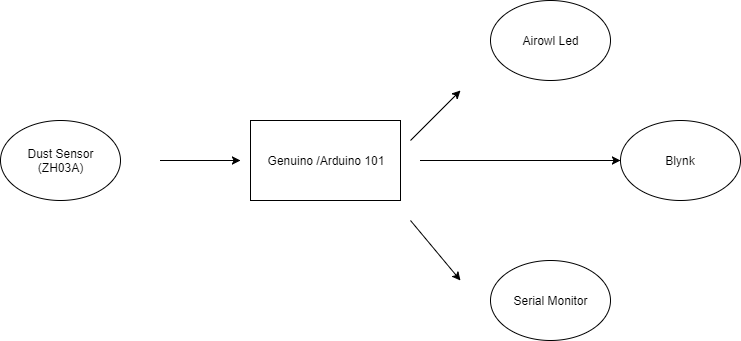
La fiche technique du capteur de poussière est donnée ci-dessous pour plus d'informations sur le capteur :
https://goo.gl/17Vgeg
Commençons maintenant à faire les choses :-
Après avoir effectué les connexions à partir des schémas, téléchargez le code. (En supposant que vous ayez installé les bibliothèques requises.)
Pour plus d'informations, consultez :- http://docs.blynk.cc/
Maintenant, configurons blynk :
Première installation de blynk depuis playstore/appstore
Playstore - https://play.google.com/store/apps/details?id=cc.blynk&hl=en
Appstore - https://itunes.apple.com/us/app/blynk-iot-for-arduino-rpi-particle-esp8266/id808760481?mt=8
Après l'installation, créez un compte.
Créez d'abord un nouveau projet dans Blynk

Ensuite, sélectionnez Tableau et donnez le nom du projet
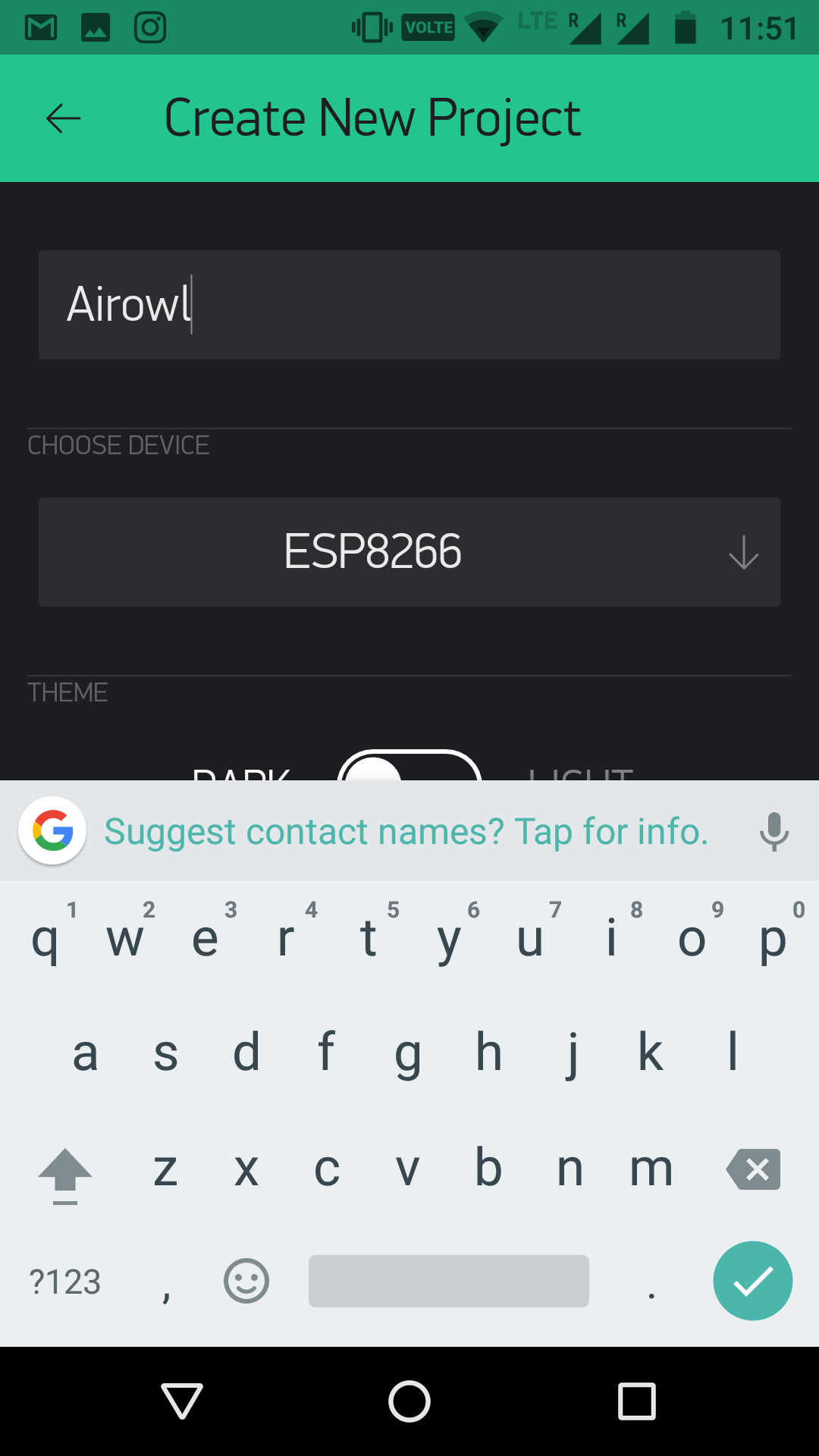
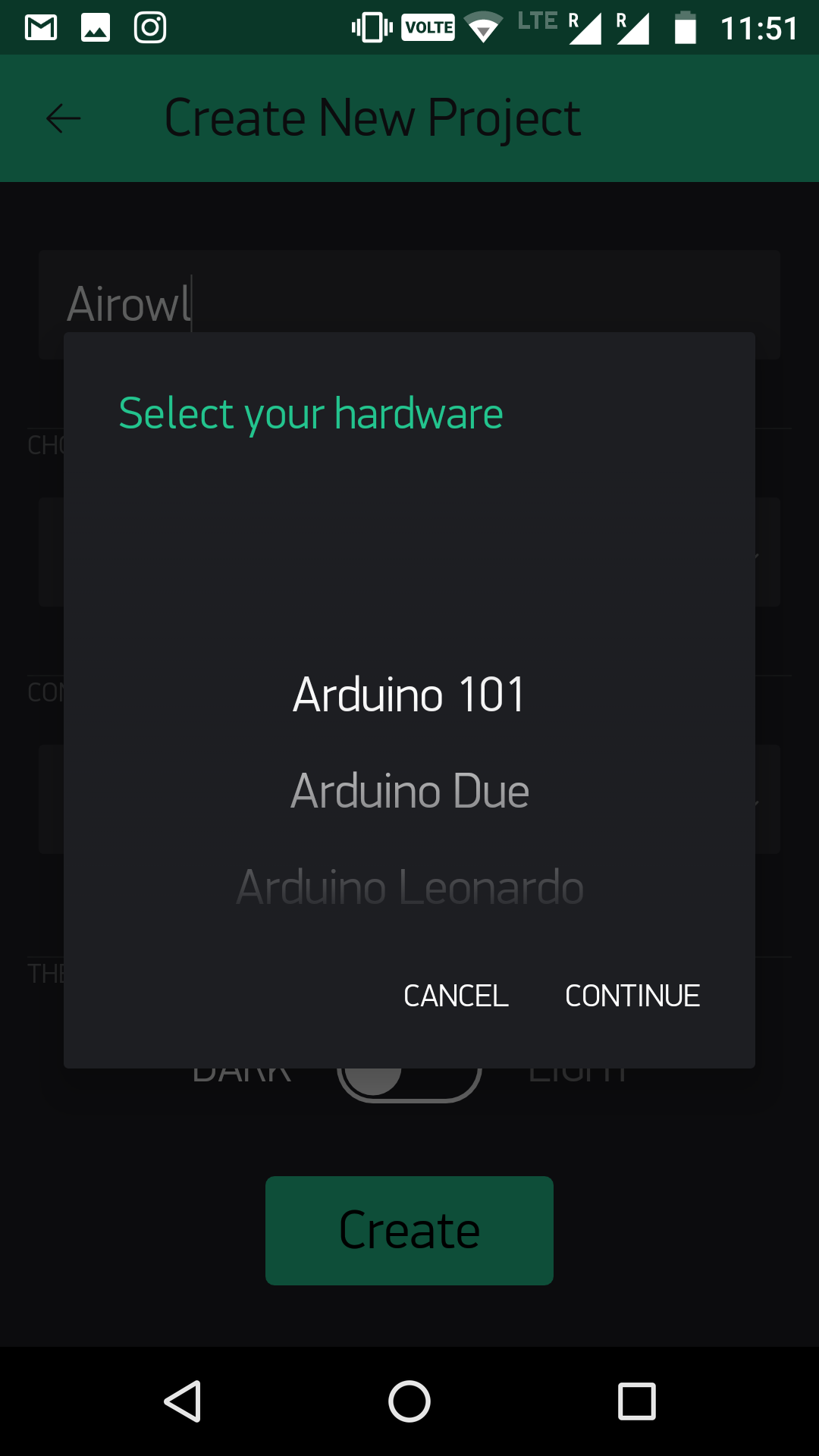
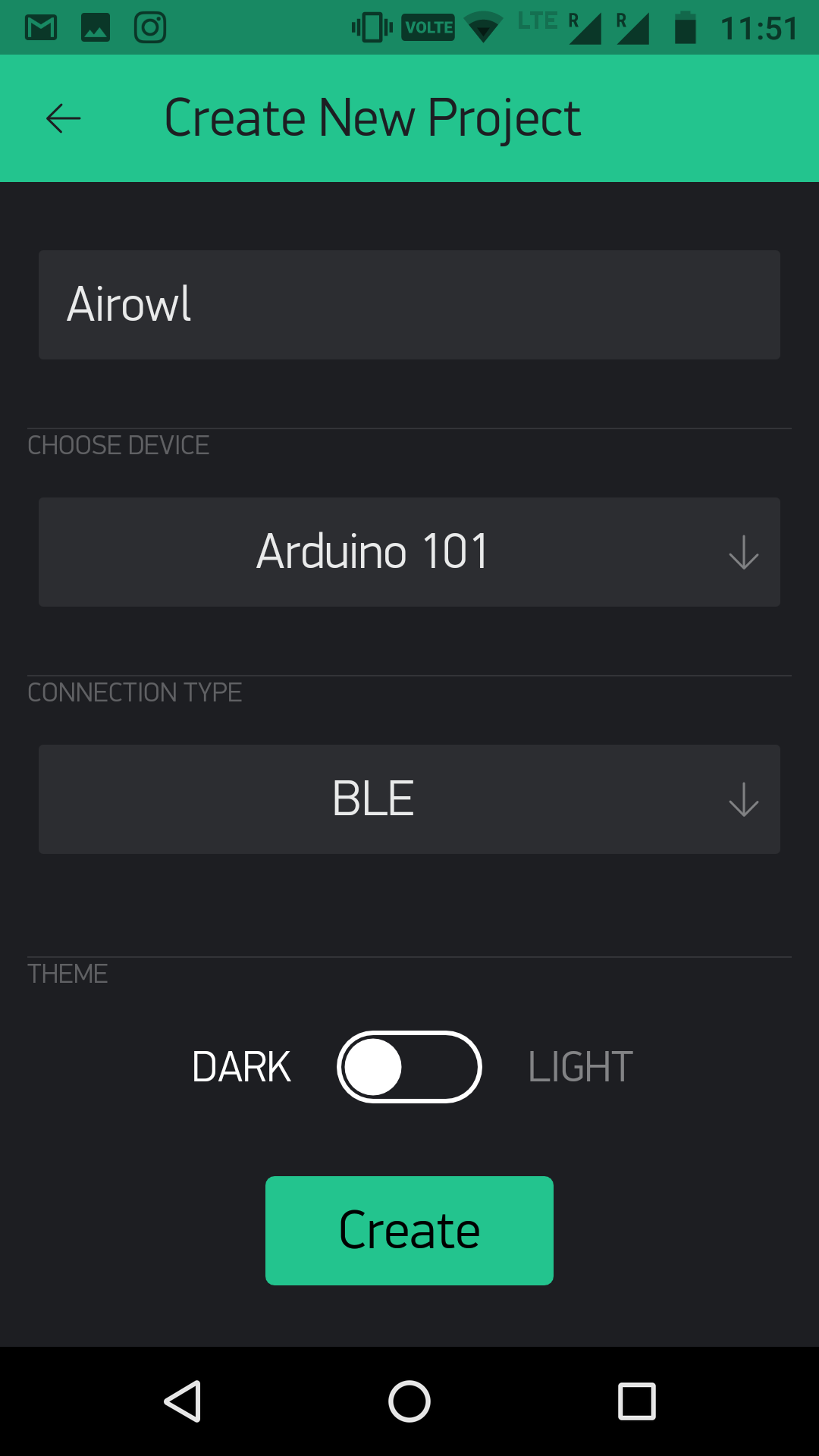
Après avoir sélectionné le tableau, cliquez sur créer.
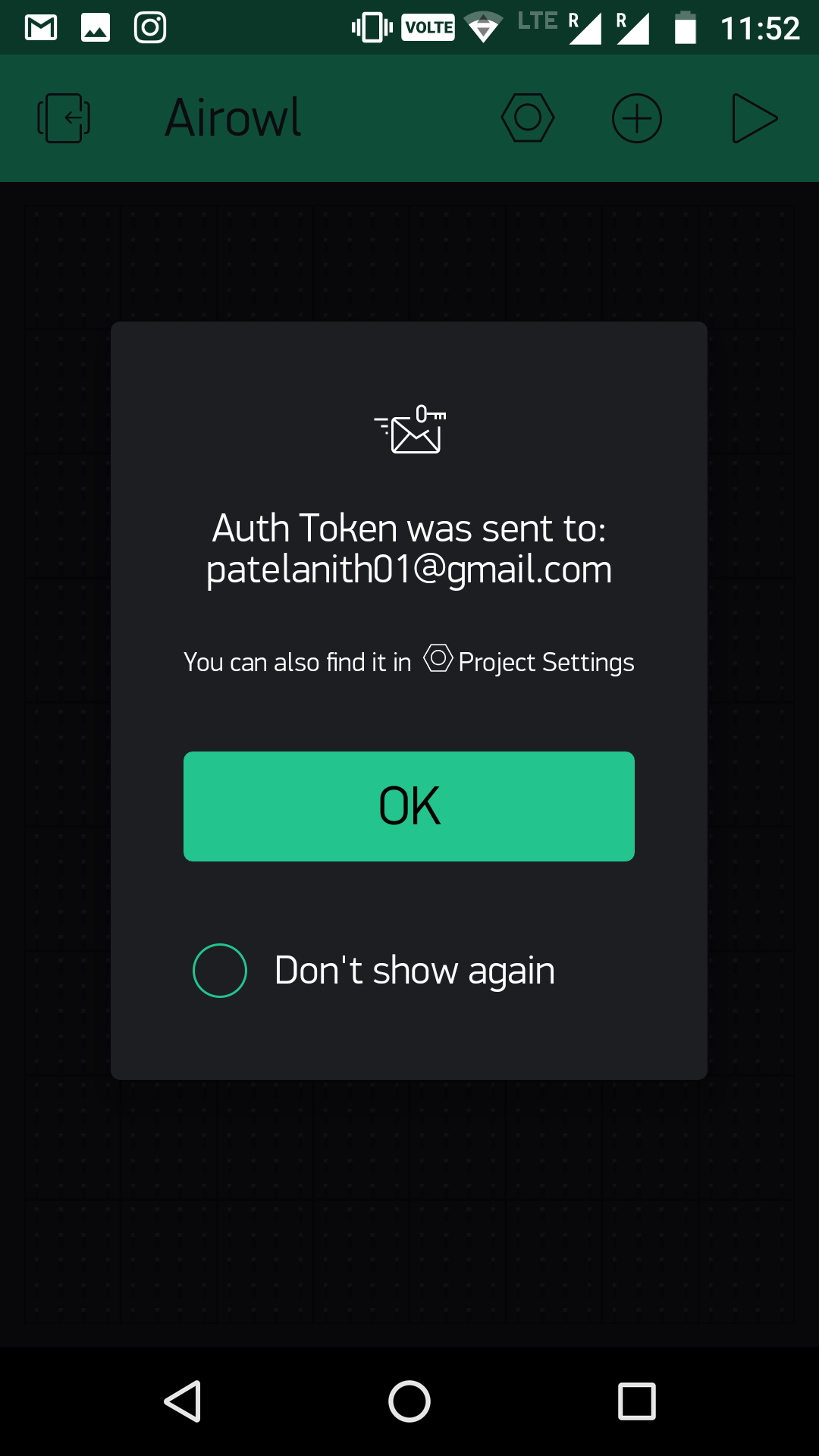
Après avoir sélectionné créer, il enverra la clé d'authentification à votre compte enregistré. Et vous pouvez également renvoyer un e-mail à partir du paramètre.
Maintenant, une fenêtre s'ouvrira où nous verrons un espace de travail vide.
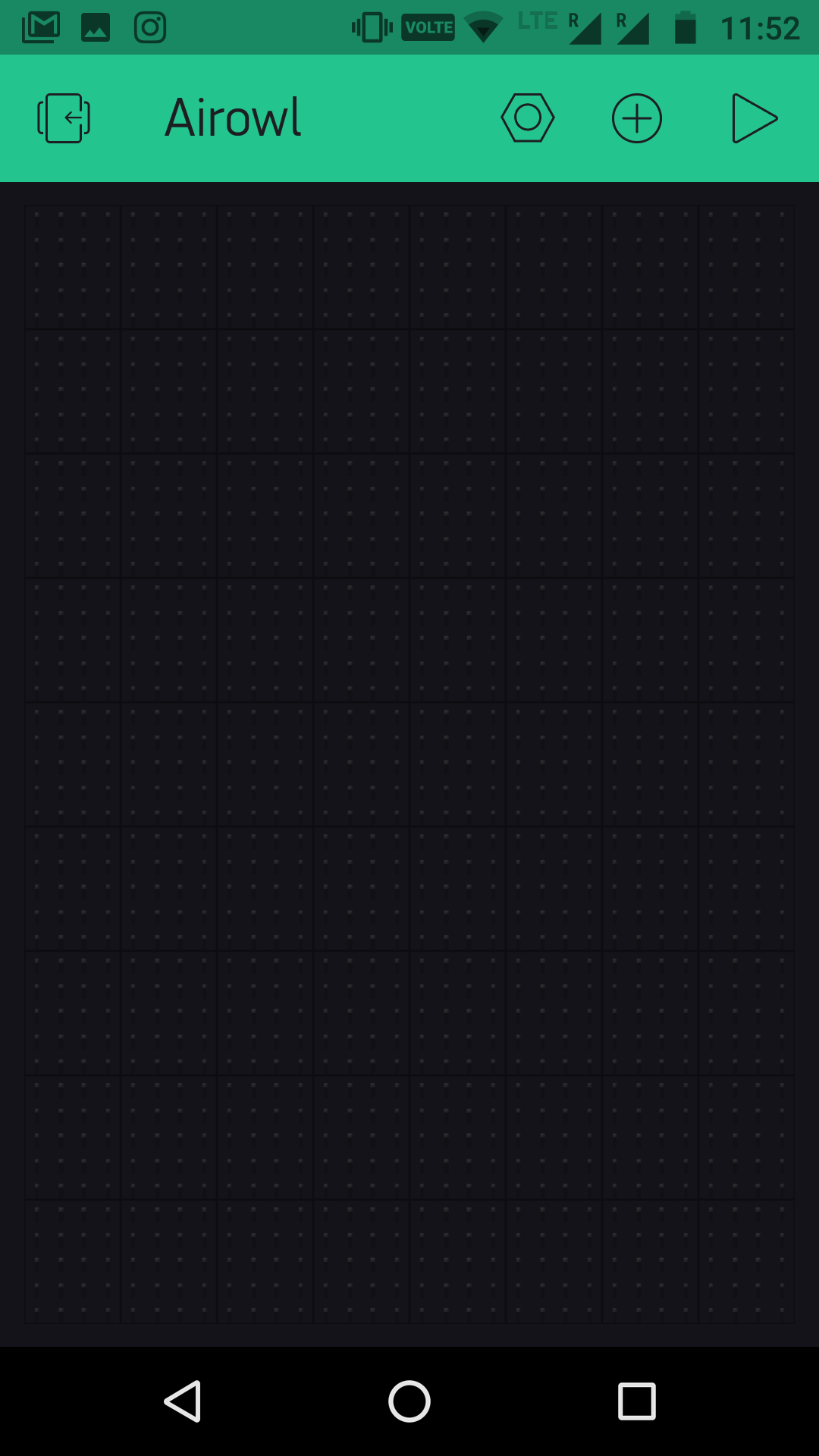
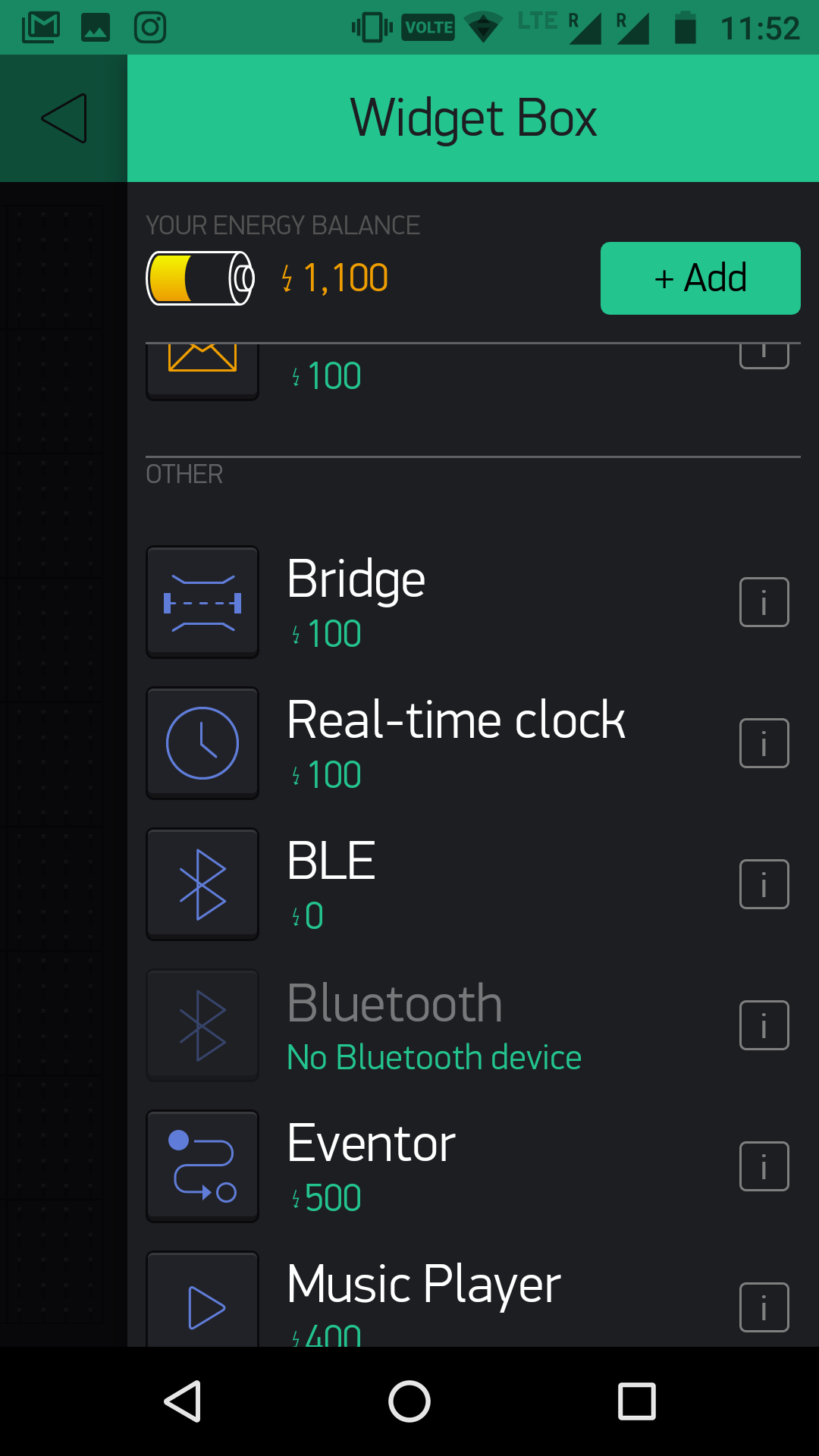
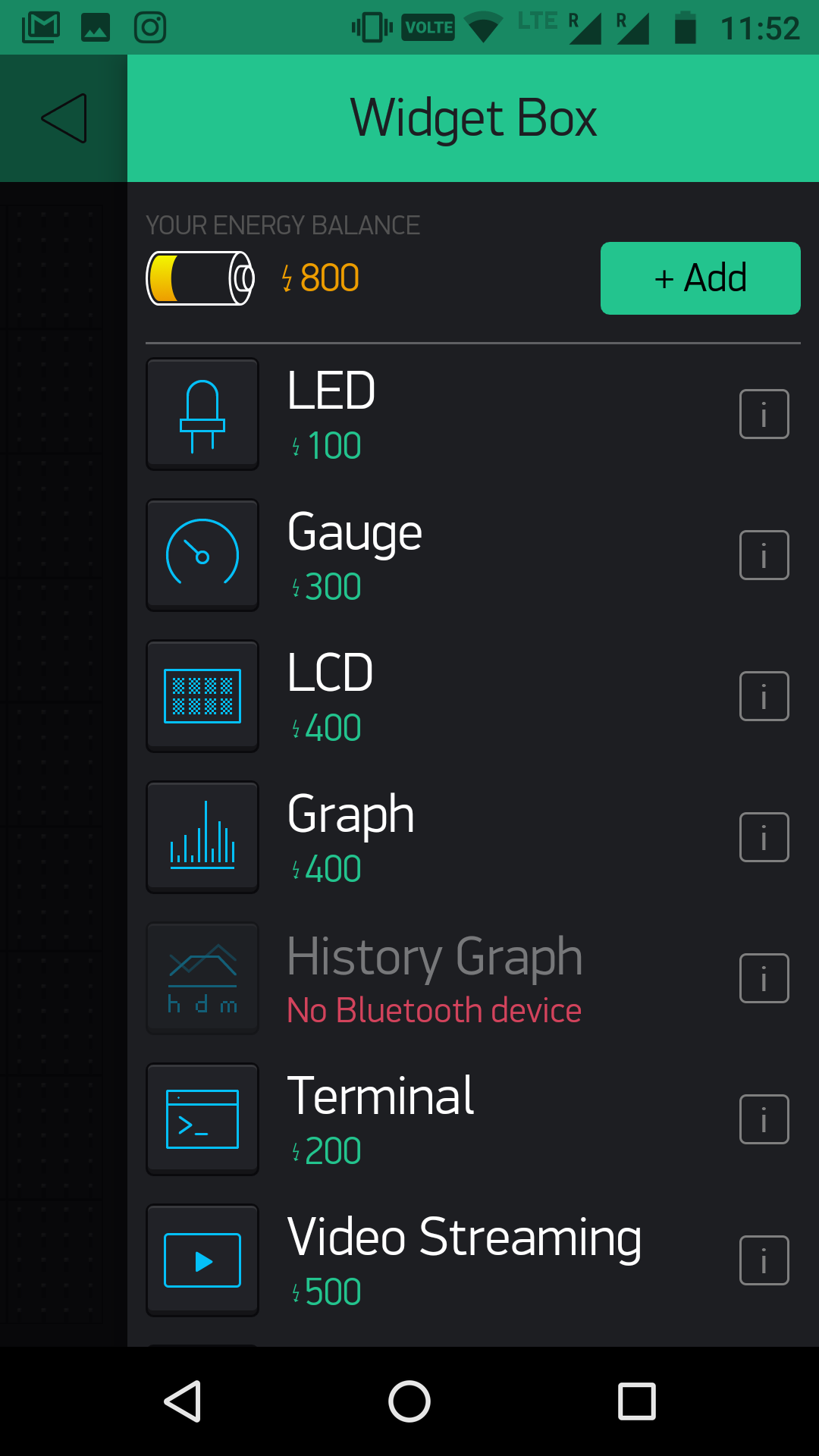
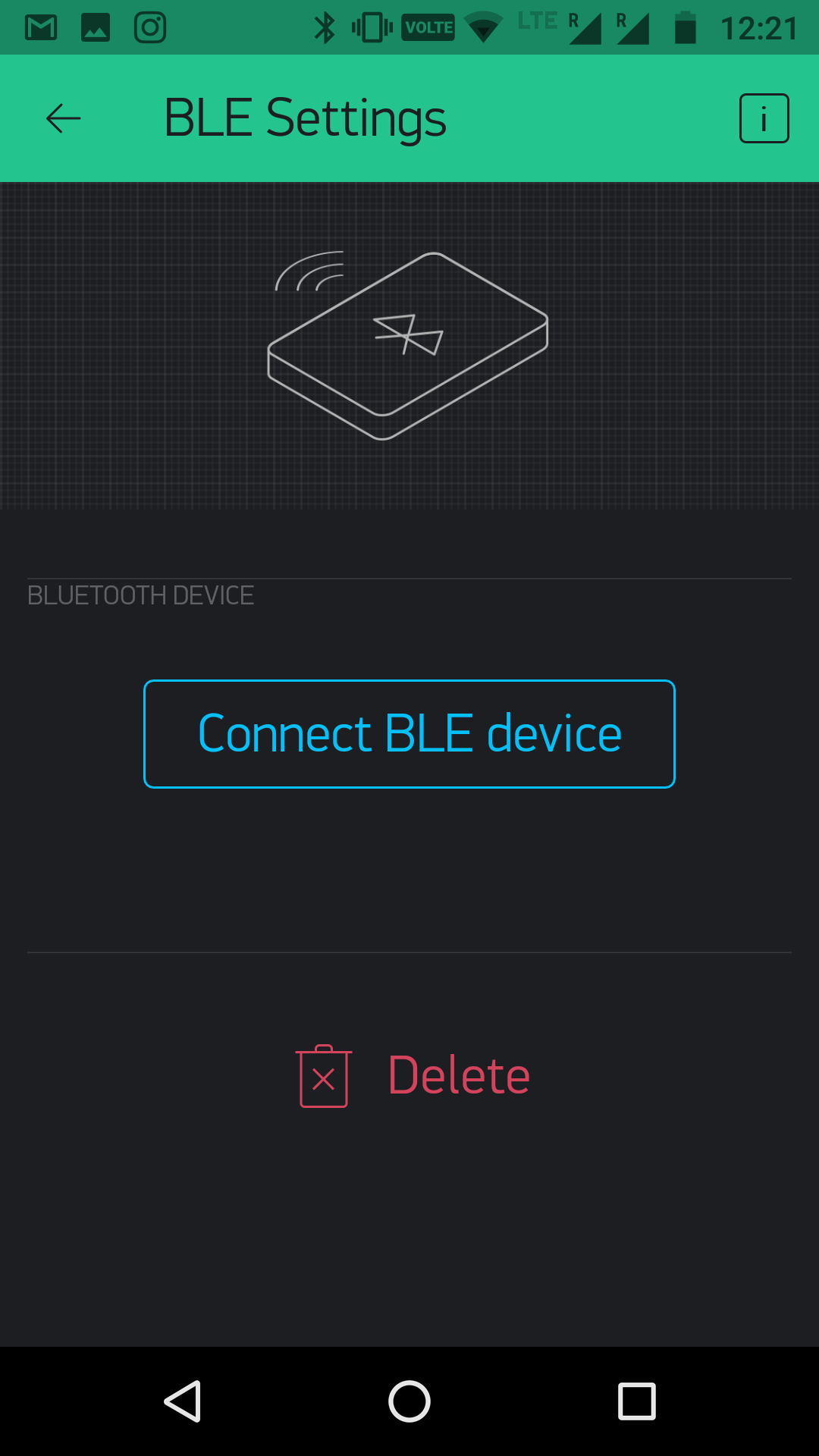
Cliquez sur le bouton Ajouter et ajoutez BLE et 3 Gage.
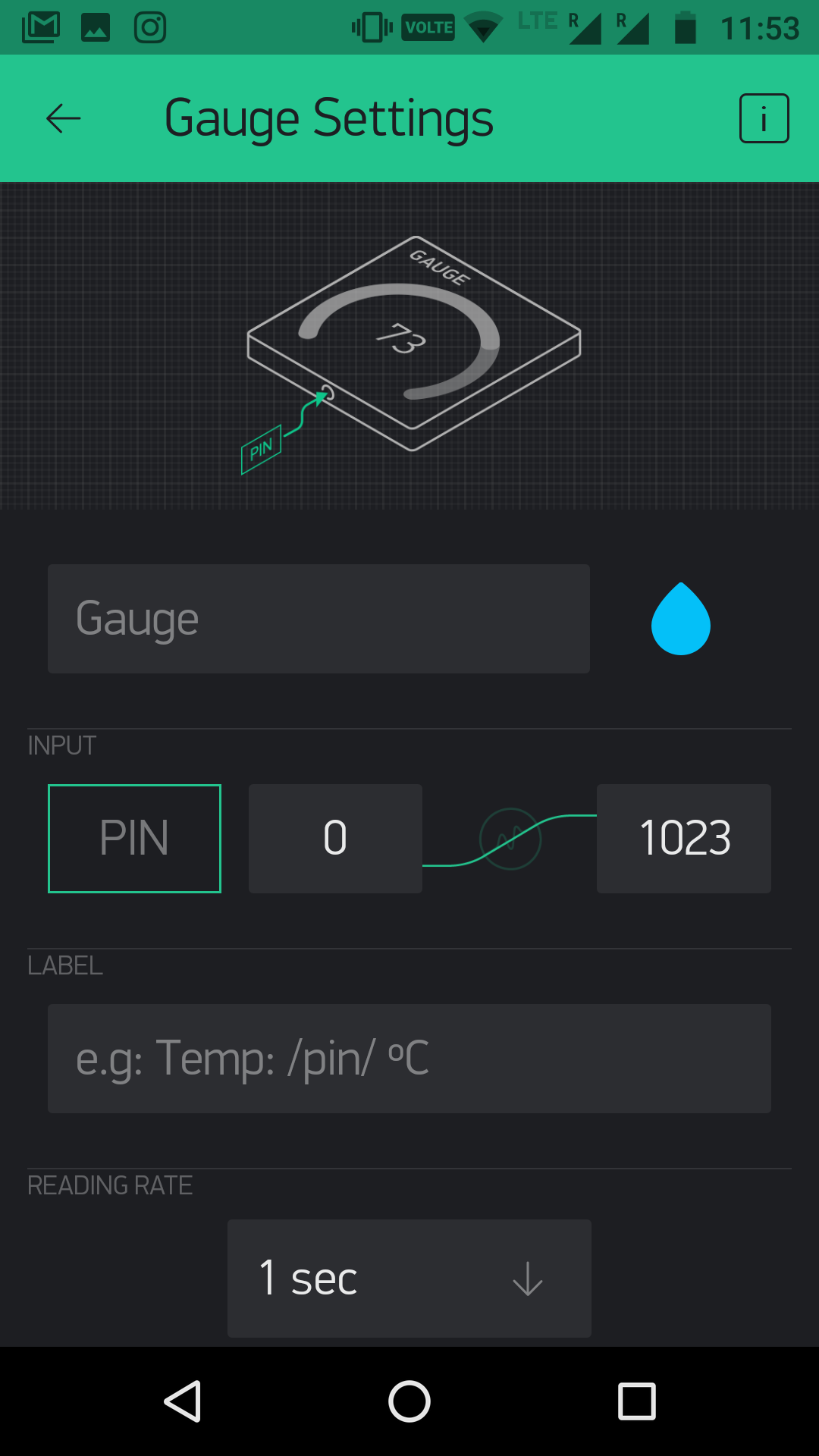
Après avoir sélectionné la jauge, sur l'espace de travail, cliquez sur la jauge et sélectionnez la broche comme V1, V2, V3 pour toutes les jauges respectivement.
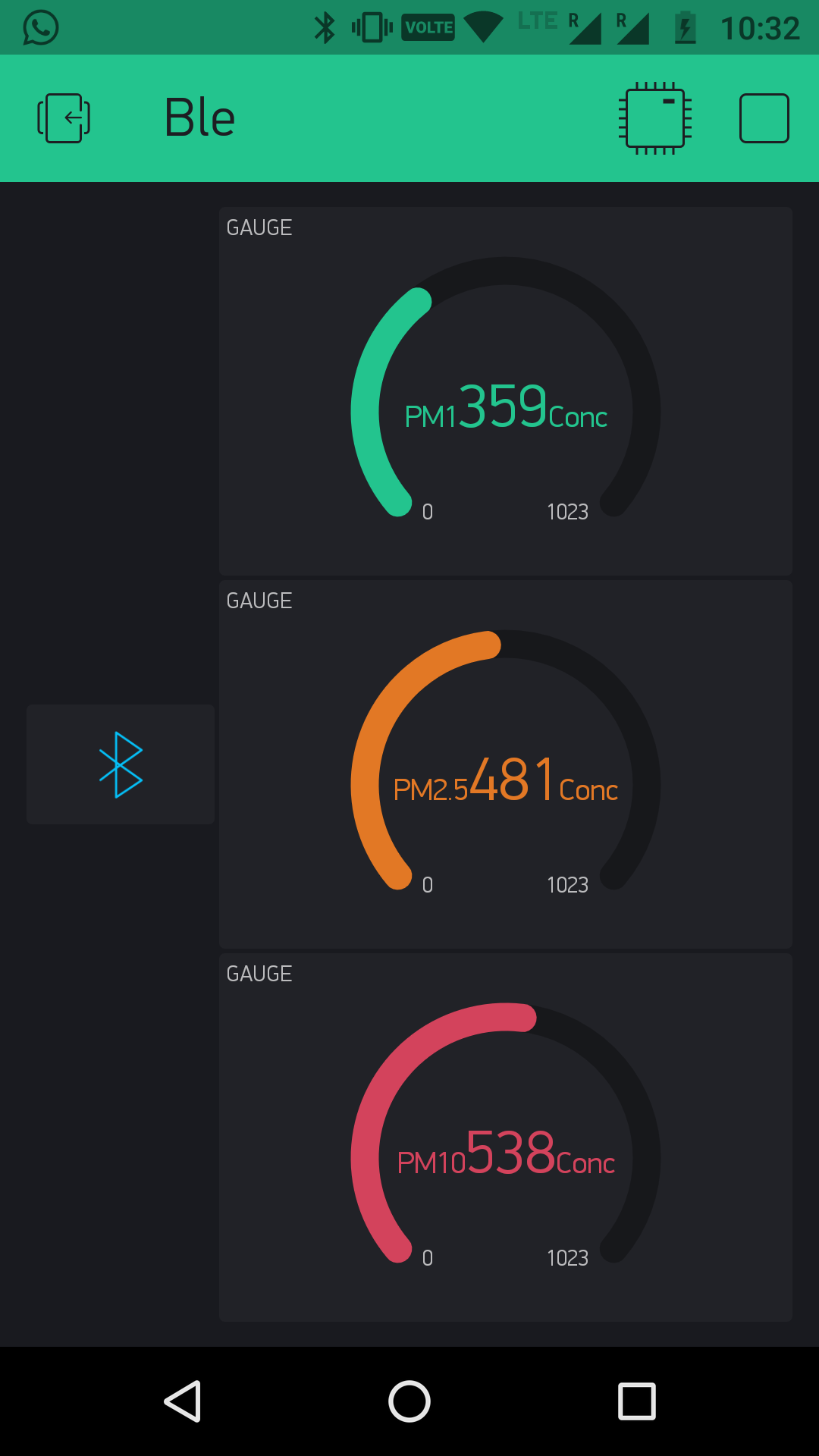
Après avoir défini cet espace de travail final ressemblera à
Maintenant, gardez l'arduino 101 connecté à l'alimentation, puis sélectionnez l'icône Bluetooth sur l'espace de travail pour définir le Bluetooth (PS-Gardez le Bluetooth du mobile activé).
Ensuite, allez dans l'espace de travail principal et commencez à simuler le projet.
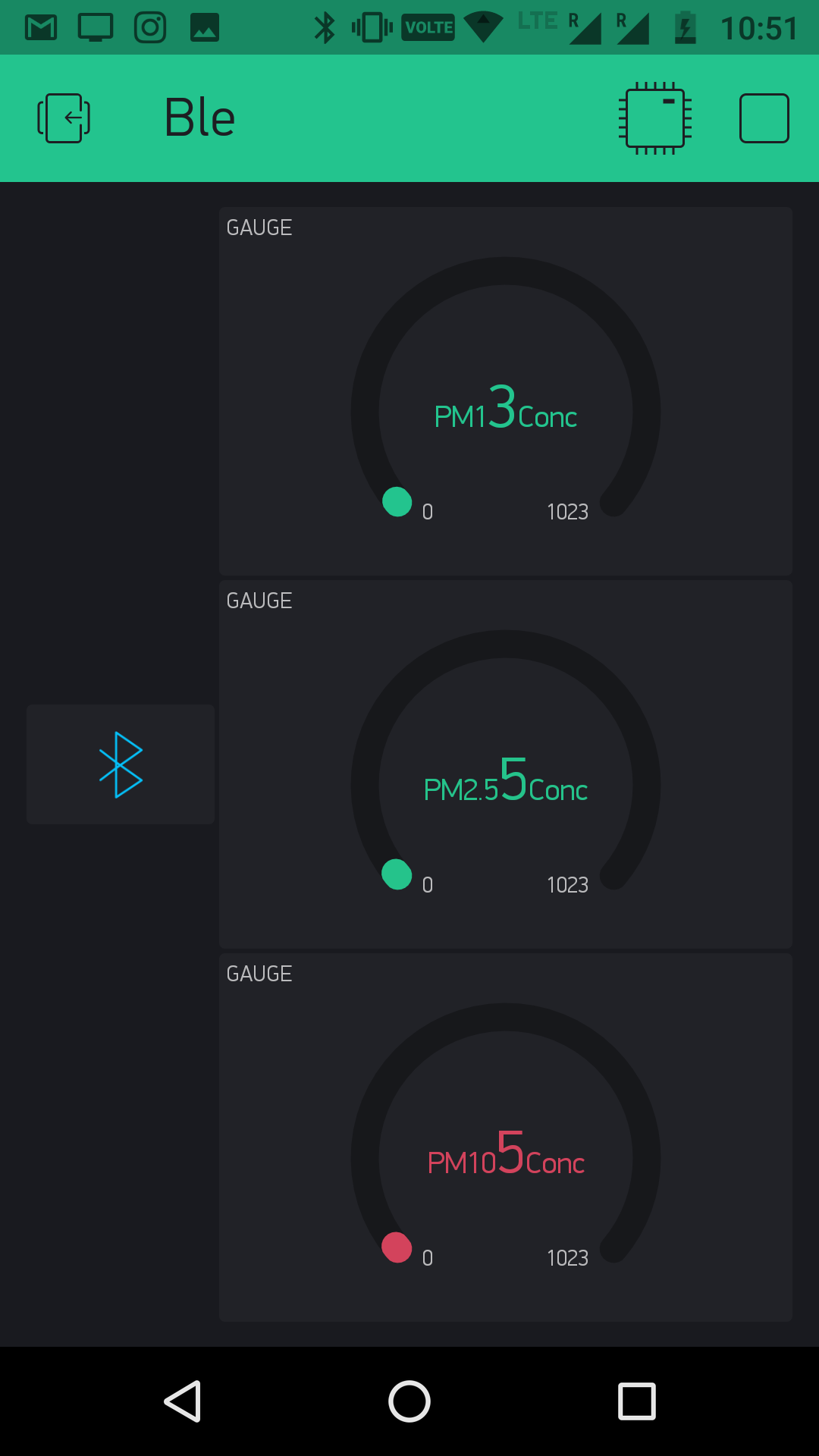
Les données seront affichées dans la fenêtre blynk.
Pour celui qui souhaite prototyper cela à l'aide d'une maquette, le schéma suivant est pour vous, j'espère qu'il pourra rendre votre expérience avec Airowl géniale.
Les données peuvent également être vues sur le moniteur série.
Le schéma du PCB est montré ci-dessous.
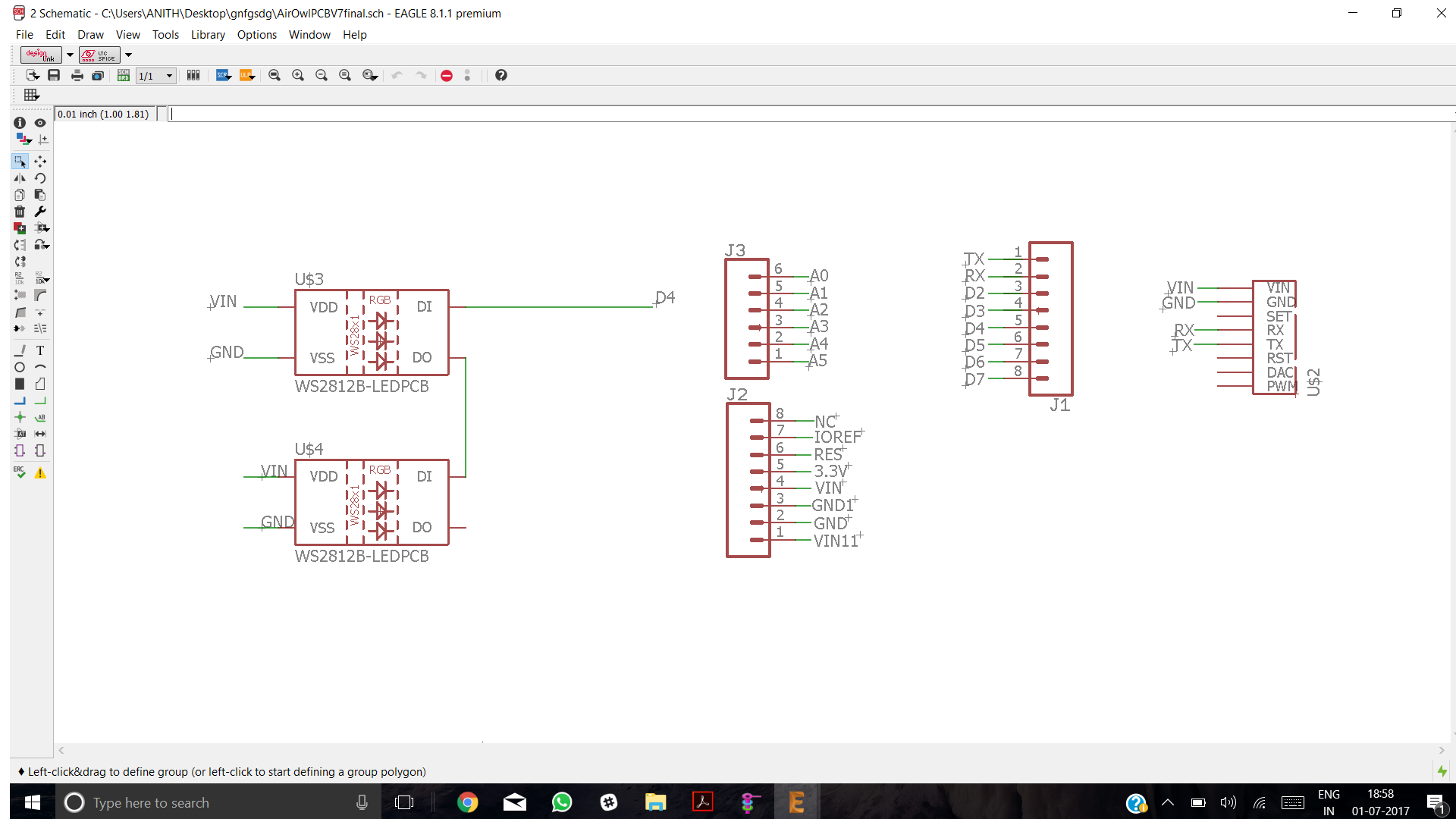
Le fichier du tableau est présenté ci-dessous.
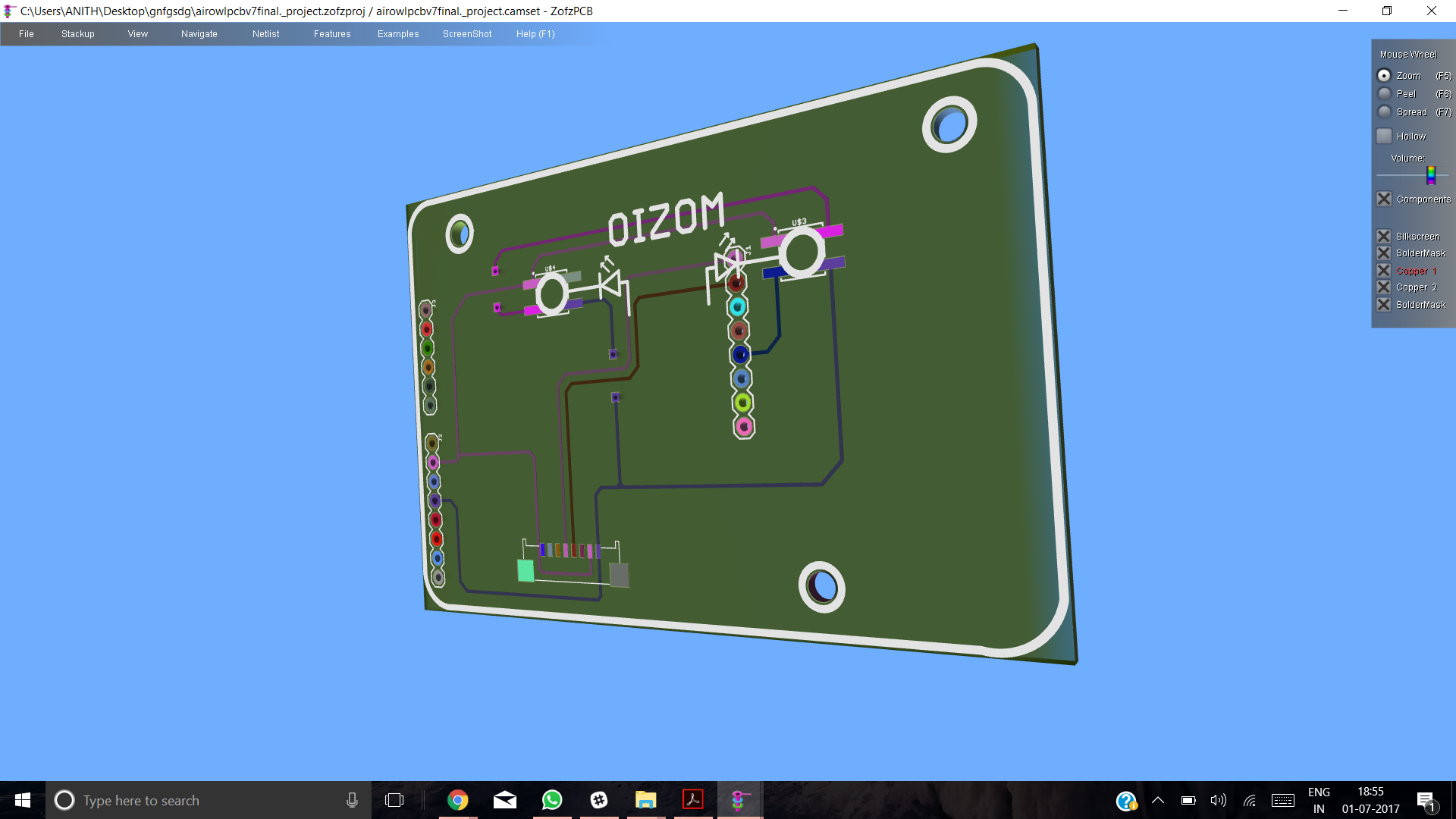
L'image 3D du PCB ressemble.
Tous les fichiers de ces images peuvent être trouvés sur le lien github mentionné ci-dessous.
https://github.com/anithp/AirOwl_Genuino101
Maintenant, vous pouvez utiliser l'Airowl et savoir ce que vous respirez, j'espère que cela vous aidera.
Merci :)
Code
- Air_owl
Air_owlC/C++
Pièces et boîtiers personnalisés
AirOwl
https://github.com/IndiaOpenDataAssociation/AirOwlSchémas
AirOwl Genuino 101
https://github.com/anithp/AirOwl_Genuino101Processus de fabrication
- Maintenance prédictive – Ce que vous devez savoir
- 7 bibliothèques React que vous devriez connaître
- Savez-vous ce que vaut votre entreprise ?
- Que sont les boutons Jig Feet ? Voici ce que vous devez savoir
- Moteurs AC et DC :ce que vous devez savoir
- Ce que vous devez savoir sur la fabrication de PCB
- Ce que vous devez savoir sur le financement d'équipement
- Ce que vous devez savoir sur les pompes à moteur submersibles ?
- Ce que vous devez savoir sur la pompe centrifuge