


Navigateur à l'aveugle
Composants et fournitures
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 |
Applications et services en ligne
 |
| |||
|
À propos de ce projet
L'histoire a commencé lorsque j'ai vu un aveugle s'efforçant de marcher à travers des obstacles comme un trou dans la route, des escaliers, etc. avec sa canne aveugle traditionnelle. Cela m'a vraiment poussé à essayer de construire ce prototype même si je ne suis pas assez expert en manipulation d'appareils électroniques. En utilisant différents types de sources sur Internet, j'arrive à le terminer l'année dernière lors de mon projet de dernière année. En plus de cela, j'améliore également le prototype en ajoutant la localisation GPS. Grâce à 1Sheeld, cela m'aide vraiment à terminer ce prototype en 6 mois.
Étape 1
Pour allumer le Blind Stick Navigator, il doit être alimenté par une alimentation externe. J'utilise une batterie 9v comme introduction sur la façon dont elle est capable de s'éteindre. D'après ce que j'ai vu, mon prototype avait l'inconvénient de fournir une consommation d'énergie à long terme. Ainsi, il a besoin d'une amélioration comme un panneau solaire/une puissance d'une manière ou d'une autre.
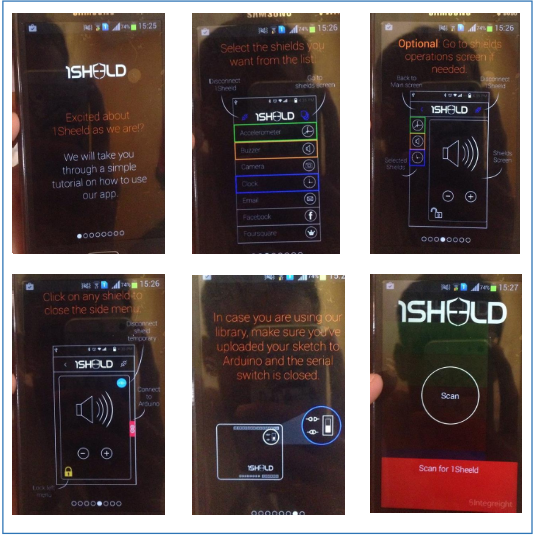
Étape 2
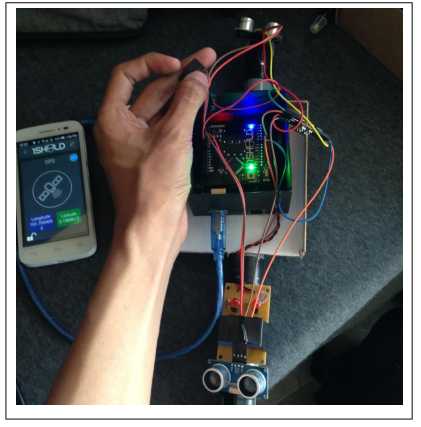
Après l'avoir allumé à l'aide de la batterie qui se connecte à l'adaptateur d'alimentation USB du microcontrôleur Arduino Uno, le tuteur doit toujours laisser la connexion Bluetooth (smartphone Android) se connecter au microcontrôleur. Ensuite, vous devez ouvrir les applications 1Sheeld déjà installées sur le smartphone et activer les fonctionnalités GPS et SMS.
** Oui, je sais que les personnes aveugles ne peuvent pas voir et accéder au smartphone, mais au moins si moi ou vous parvenez à faire la modification sur le smartphone Android OS, cela sera beaucoup plus facile. J'ai déjà fait de mon mieux pour trouver un meilleur smartphone doté d'un bouton braille, mais j'ai échoué. Ainsi, j'espère qu'à l'avenir, il y aura une mise à niveau pour mon prototype.
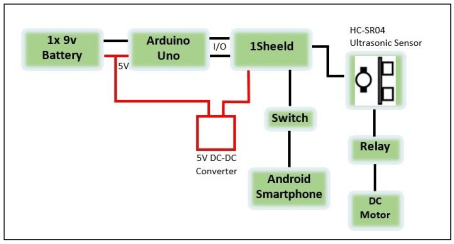
Étape 3
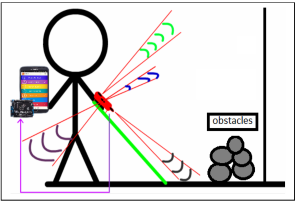
Sur la base du schéma fonctionnel ci-dessus, comme vous pouvez le voir, c'est ainsi que la connexion entre les appareils se produit. Une fois ces deux allumés, les personnes aveugles peuvent commencer à utiliser le Blind Stick Navigator. Sur la base de l'observation sur la canne blanche traditionnelle, les aveugles se balanceront toujours autour du bâton aveugle pour obtenir une confirmation de leur environnement. Mais, avec Blind Stick Navigator, cela les aidera à obtenir une notification par vibration sur l'obstacle au milieu et au bas de la vue. L'obstacle détecté à l'aide du capteur à ultrasons HC-SR04. Il a été attaché en haut du bâton et en bas du bâton. J'utilise un tuyau en PVC car je peux mettre le moteur vibrant à courant continu à l'intérieur du tuyau en PVC. Le mode de vibration peut être modifié dans le code fourni à l'aide du logiciel Arduino IDE.
Étape 4
En plus de cela, le Blind Stick Navigator peut fournir la longitude et la latitude de l'emplacement des personnes aveugles. En effet, le smartphone agit en tant que fournisseur et fournit une localisation GPS pour ce processus. L'interrupteur à bascule est ajouté pour permettre aux personnes aveugles de cliquer plus facilement sur le bouton d'urgence pour informer le destinataire qu'il est déjà perdu ou en danger. En cliquant dessus une ou plusieurs fois, le smartphone enverra un message informant qu'il a besoin d'aide et veuillez le rechercher sur la base du lien GPS et Google Map. Le numéro du destinataire peut être défini si le message doit être envoyé à l'autorité ou au tuteur des personnes aveugles uniquement. La longueur du bâton est réglable en fonction de la taille de l'utilisateur. Pour ce prototype, j'utilise une longueur spécifique et la longueur de la détection peut être modifiée dans le code.
Étape 5
Enfin, j'espère que mon prototype sera utilisé dans le monde entier ou qu'il sera commercialisé afin d'aider les personnes aveugles au cours de leur voyage/vie. De plus, je suis vraiment désolé pour ma grammaire car mon anglais n'est pas très bon. Je ne sais pas décrire plus dans ce post. Toutes les informations que j'ai déjà compilées dans la pièce jointe. Vous pouvez vous référer plus sur ce projet basé sur le lien que j'ai fourni ci-dessous.
Document du Projet :
- FYP 1
- FYP 2
Affiche du Projet :
- FYP 1
- FYP 2
Vidéo du Projet :
- Vidéo 1
- Vidéo 2
Code
- OneSheeldBlindStickNavigator
OneSheeldBlindStickNavigatorC/C++
#define CUSTOM_SETTINGS#define INCLUDE_GPS_SHIELD#define INCLUDE_SMS_SHIELD/* Inclut la bibliothèque 1Sheeld.*/#include#include #define trigPinL 4#define echoPinL 5#define trigPinH 6#define trigPinH 6#define #define Vib1 12#define Vib2 13#define SW 8/* Définit un indicateur booléen. */boolean isInRange =false;float lat;float lon;String PhoneNumber ="0134087286";String Message;String Message1;String Message2;char latitude[10];char longitude[10];void setup() { pinMode(trigPinL, SORTIR); pinMode(echoPinL, INPUT); pinMode(trigPinH, SORTIE); pinMode(échoPinH, INPUT); pinMode(Vib1, SORTIE); pinMode(Vib2, SORTIE); pinMode(SW, INPUT); /* Démarrer la communication.*/ OneSheeld.begin(); // Serial.begin(9600);}boucle vide(){ longue duréeL, distanceL, duréeH, distanceH, MixDist; digitalWrite(trigPinL, LOW); // Ajout de cette ligne delayMicroseconds(2); // Ajout de cette ligne digitalWrite(trigPinL, HIGH); délaiMicrosecondes(10) ; // Ajout de cette ligne digitalWrite(trigPinL, LOW); duréeL =pulseIn(echoPinL, HIGH); distanceL =(duréeL/2) / 29,1 ; digitalWrite(trigPinH, LOW); // Ajout de cette ligne delayMicroseconds(2); // Ajout de cette ligne digitalWrite(trigPinH, HIGH); délaiMicrosecondes(10) ; // Ajout de cette ligne digitalWrite(trigPinH, LOW); duréeH =pulseIn(echoPinH, HIGH); distanceH =(duréeH/2) / 29,1; // Serial.println(distanceL); // Serial.println(distanceH); // retard(1000); if (distanceL> 40){ digitalWrite(Vib1,HIGH); } if (distanceL <40){ digitalWrite(Vib1,LOW); } if (distanceH <100){ digitalWrite(Vib1,HIGH); retard (200); digitalWrite(Vib1,LOW); retard (200); } /* Vérifiez toujours si le GPS du smartphone et une longitude et une latitude données sont dans une plage de 100 mètres. */ //if(GPS.isInRange(30.0831008,31.3242943,100)) // { // if(!isInRange) // { /* Envoyer un SMS. */ lat =GPS.getLatitude(); lon =GPS.getLongitude(); Message1 =Chaîne(lat,8) ; Message2 =Chaîne(lon,8) ; if (digitalRead(SW) ==0){ Message ="J'ai besoin d'aide ! Je suis à la latitude :" + Message1 + " et à la longitude :" + Message2; Message ="Google Maps - https://www.google.co.in/maps/place/" + Message1 + "," + Message2 ; SMS.send (numéro de téléphone, message); retard (3000); } // isInRange =true; // } // } // else // { // if(isInRange) // { /* Envoyer un SMS. */ // SMS.send("+601123413946", "Le smartphone n'est pas à portée."); // isInRange =false; // } // } délai(1000);}
Schémas
OneSheeldTONGKAT.fzzProcessus de fabrication
- Détecteur de langage TinyML basé sur Edge Impulse et Arduino
- Jeu de gyroscope Arduino avec MPU-6050
- Dés numériques Arduino
- Jeu de roulette DIY 37 LED
- Mini arcade ATtiny85 :Serpent
- Détecteur de portée portable
- Lampe de bureau réactive audio Arduino
- voiture robot intelligente de suivi du visage
- La galvanoplastie avec du cuivre