


Distributeur de désinfectant pour les mains bricolage utilisant Arduino
Composants et fournitures
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
| |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Outils et machines nécessaires
 |
|
Applications et services en ligne
 |
|
À propos de ce projet



Dans ce scénario actuel d'épidémie mondiale, il est conseillé par l'OMS (organisation mondiale de la santé) pour maintenir en bonne santé Lavage des mains et habitudes d'hygiène, mais le principal problème est la façon dont nous le faisons, c'est-à-dire par toucher physique à la bouteille, ce qui en bref ne sert pas notre objectif, donc dans ce tutoriel, nous allons apprendre comment faire un D.I.Y. Distributeur de savon ou de désinfectant pour les mains à base d'Arduino.
Fournitures :
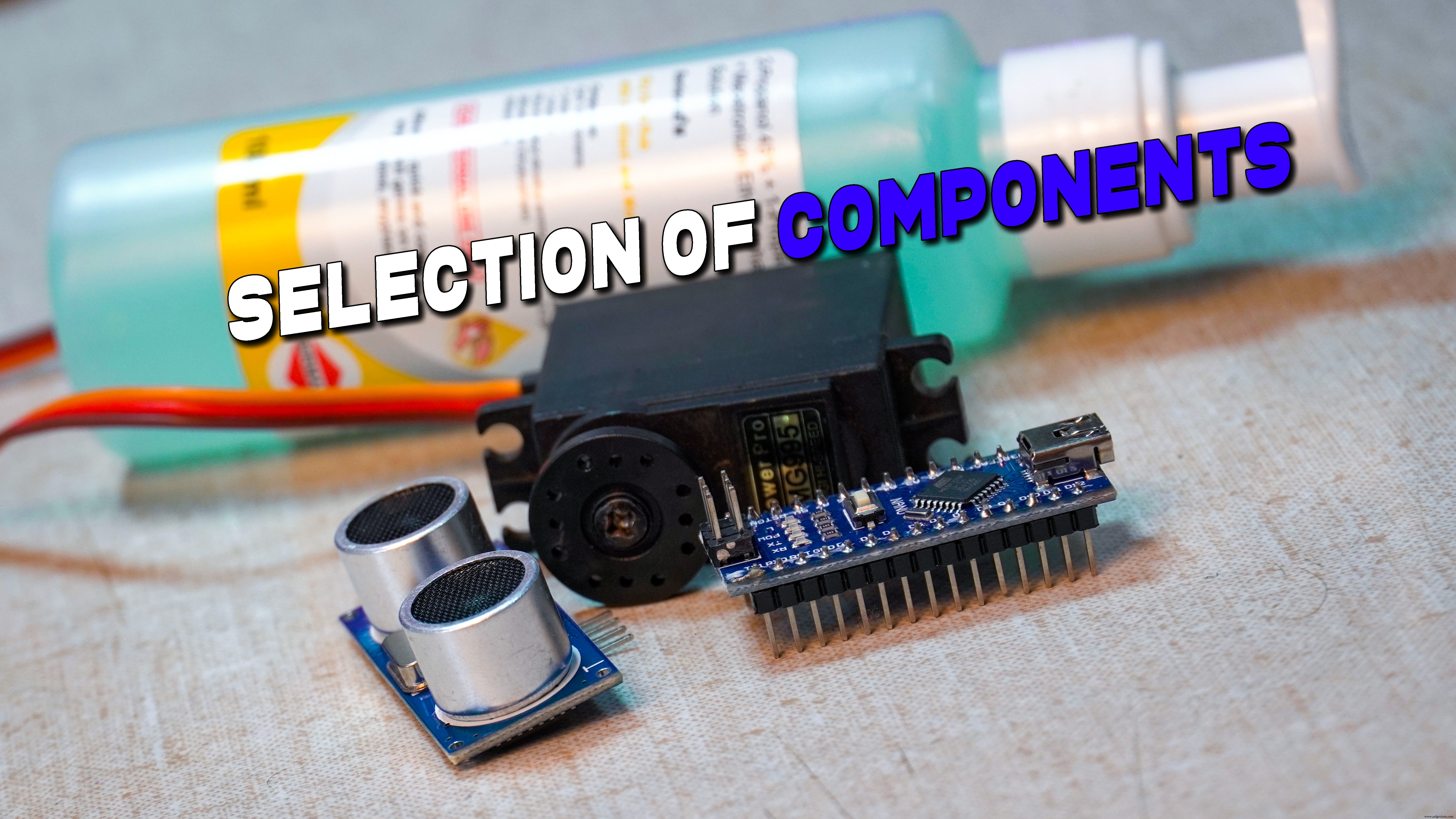
Électronique :
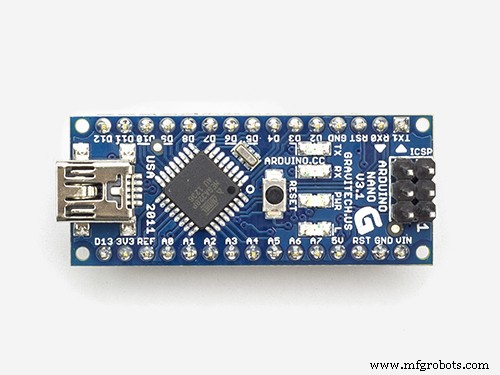
- Arduino Nano (ou n'importe quel Arduino).
- Capteur à ultrasons ( HC-SR04)
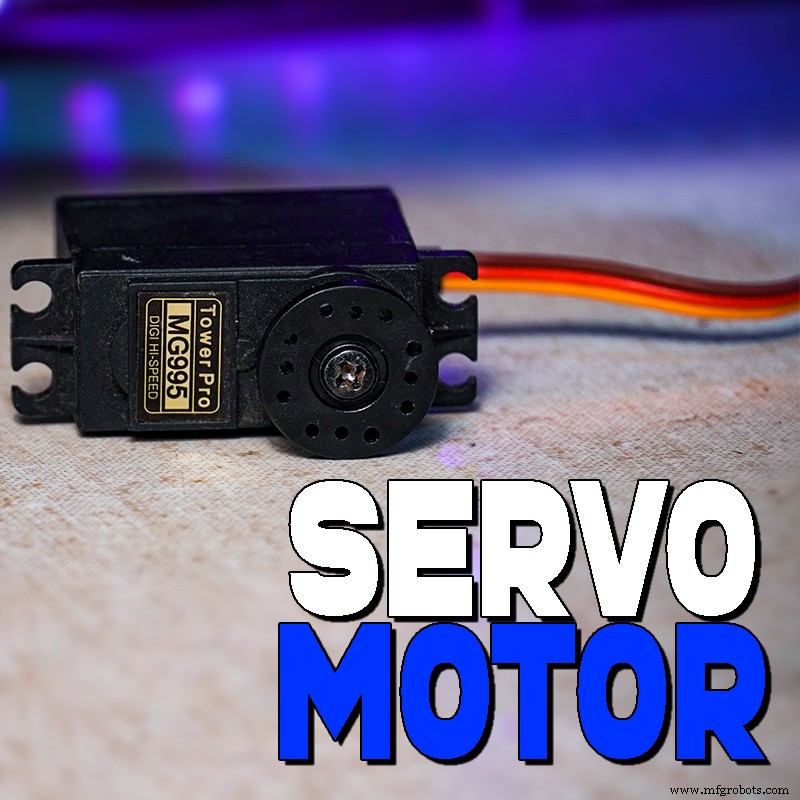
- Servomoteur (métal à engrenage préféré).
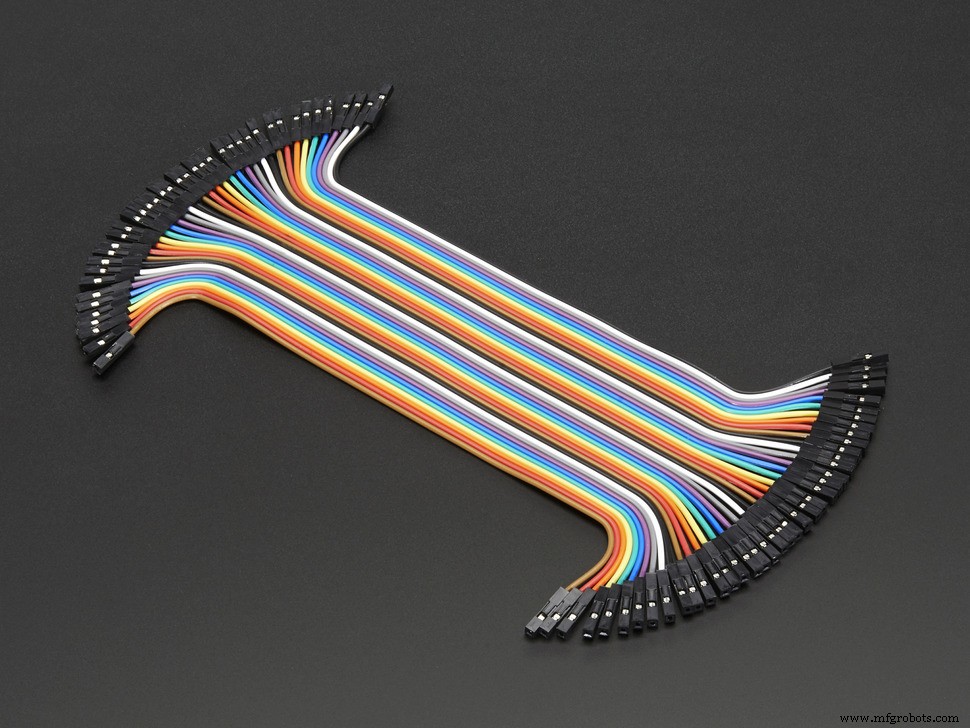
- Câbles de pontage (femelle à femelle).
Outils :
- Pistolet à colle chaude.
- Ordinateur ou portable.
Divers :
- Frotter ou désinfectant pour les mains à base d'alcool. (le plus important)
- Vis autotaraudeuse (1 pièce).
- Fil de cuivre de 0,8 mm (0,5 mètre).
- récipient en plastique (qui s'adapte confortablement à tout à l'intérieur)
- Stationnaire (échelle marqueur et règle).
Étape 1 : Regardez la vidéo
Étape 2 :Sélectionnez le liquide

La première chose et la plus importante dont nous aurons besoin pour cette construction est un désinfectant pour les mains ou un désinfectant pour les mains à base d'alcool, comme suggéré par l'OMS. ( organisation mondiale de la santé ) trouvez plus d'informations ici.
pour cette construction, il est très important d'avoir le bon type de distributeur, puisque nous fabriquons juste un distributeur et n'imprimons pas l'ensemble du mécanisme, nous aurons besoin d'alcool ou de désinfectant pour les mains dans un distributeur ou une bouteille de type poussoir.
Étape 3 :Sélection des composants
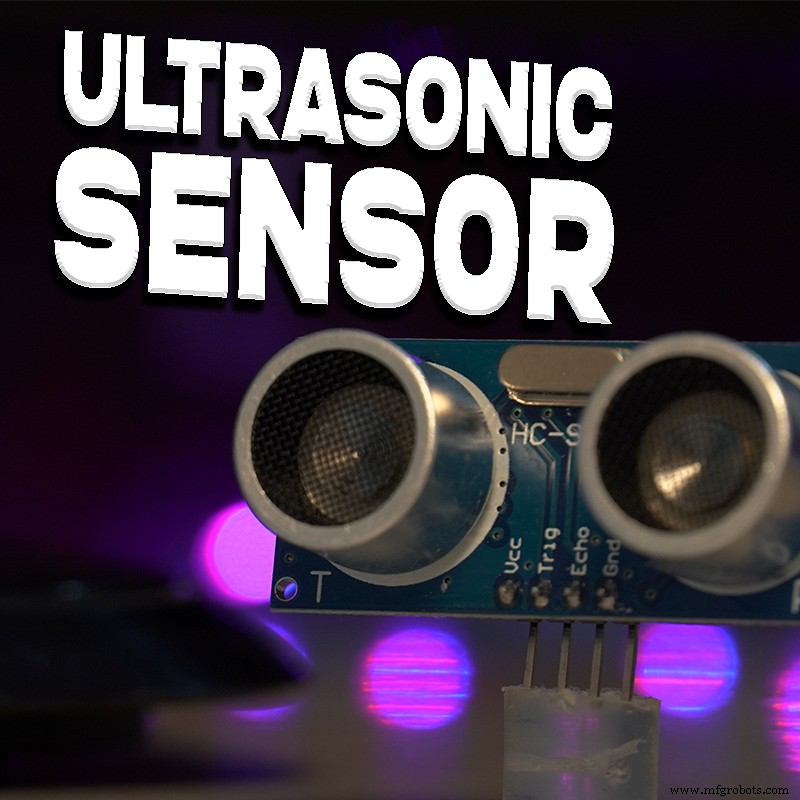

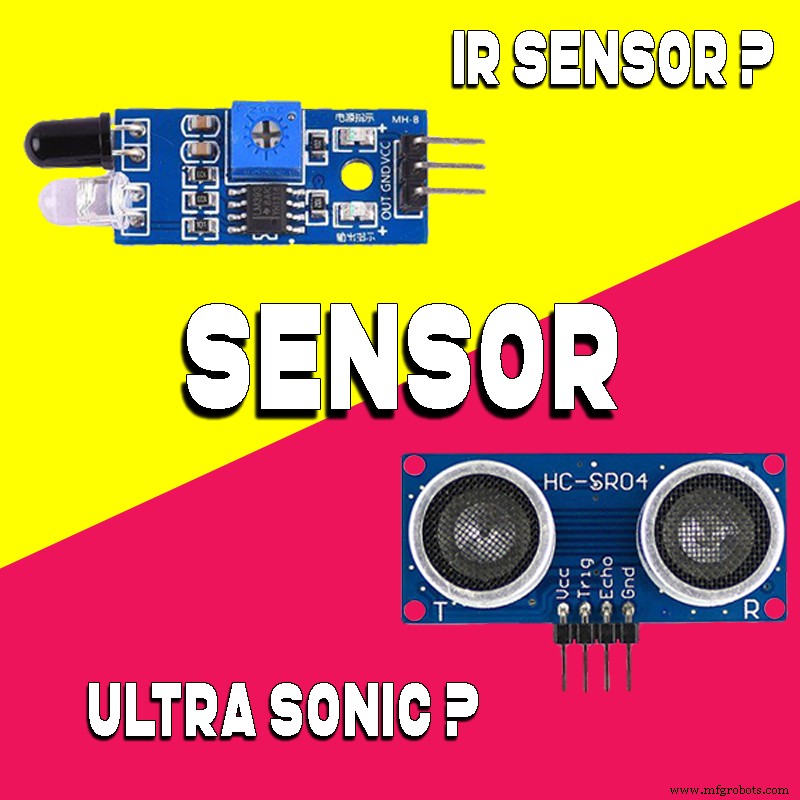
Capteur :
Nous aurons besoin d'un capteur pour détecter notre proximité ou notre présence, qui agira essentiellement comme un déclencheur ou un interrupteur sans contact pour ce système. Nous avons ici deux choix, c'est-à-dire que nous pouvons utiliser soit un module de capteur IR, soit un module de capteur à ultrasons. Nous pouvons utiliser le module de capteur IR, qui est fondamentalement une option bon marché et efficace, mais parfois inexacte, ou nous pouvons utiliser le capteur à ultrasons HC-SR04, qui est assez précis au-dessus de la plage de 2 cm, et une option légèrement chère, mais nous utiliserons un capteur à ultrasons pour ce Tutoriel, pour une meilleure précision.
Moteurs :
Pour le mouvement ou pour traiter la Sortie , nous pourrions avoir besoin d'une pompe , soit moteur , ou un composant électronique qui convertira le signal électrique en déplacement mécanique du désinfectant ou du désinfectant pour les mains à base d'alcool à travers le distributeur, le meilleur choix serait d'utiliser un servomoteur avec des engrenages en métal pour un couple maximal. Nous éviterons d'utiliser des micro pompes, car elles doivent être insérées dans le conteneur, ce qui crée à nouveau un point de confinement vulnérable. L'utilisation d'un mécanisme externe avec l'aide d'un servo serait donc un choix judicieux.
Microcontrôleur :
Pour cette construction de projet, nous aurons besoin d'un Microcontrôleur pour contrôler la Entrée et Sortie , pour Calculer la distance ou sens le Déclencheur à partir du capteur et traitez la sortie sous forme de balayage servo dans notre exemple, pour lequel nous pouvons utiliser n'importe quel arduino, ce qui facilite le réglage des paramètres, affine les sorties, de sorte que vous pouvez utiliser n'importe quel Arduino, nous utiliserons Arduino Nano pour notre cas de travail.
Étape 4 : Comprendre la mécanique
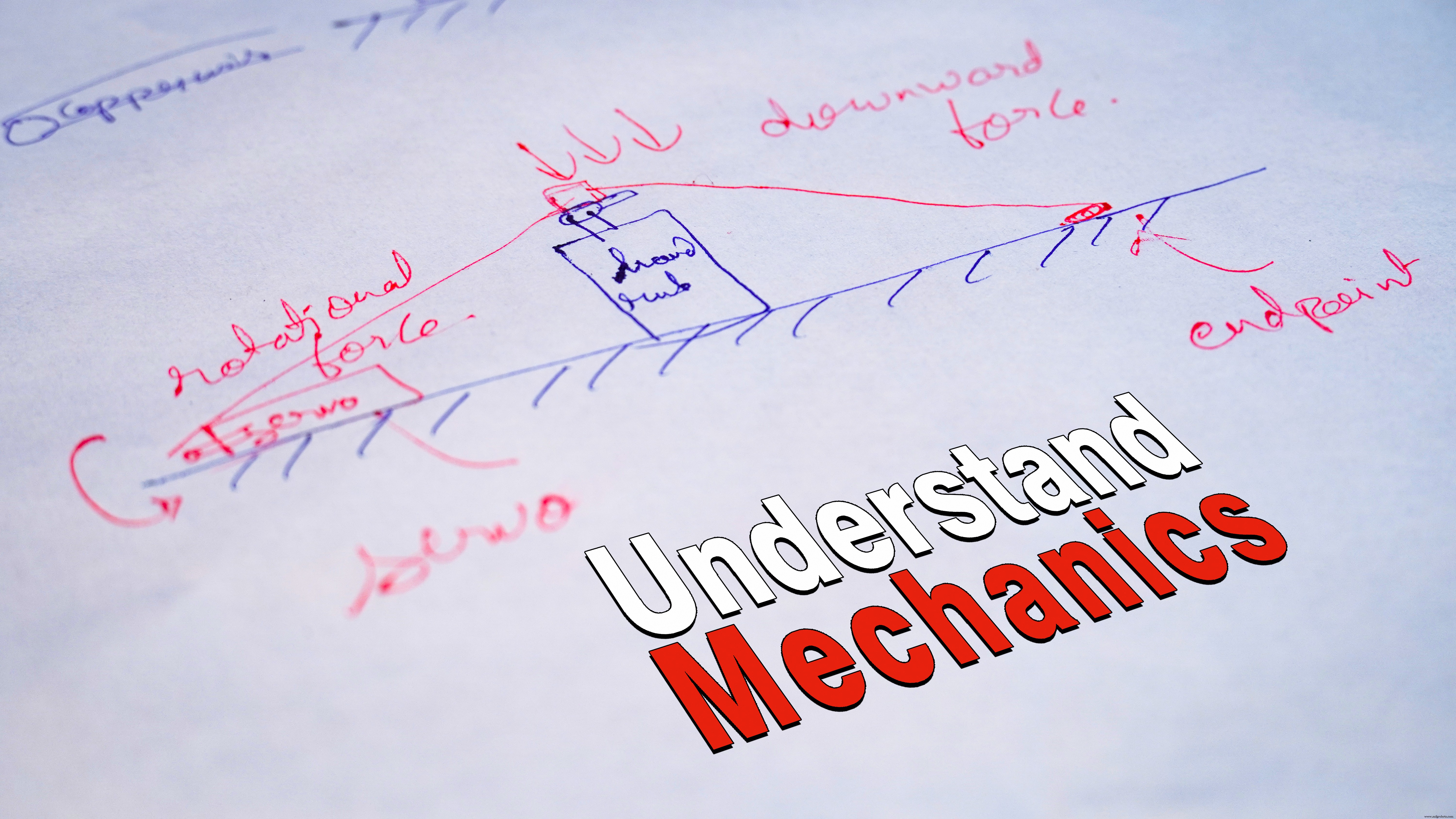
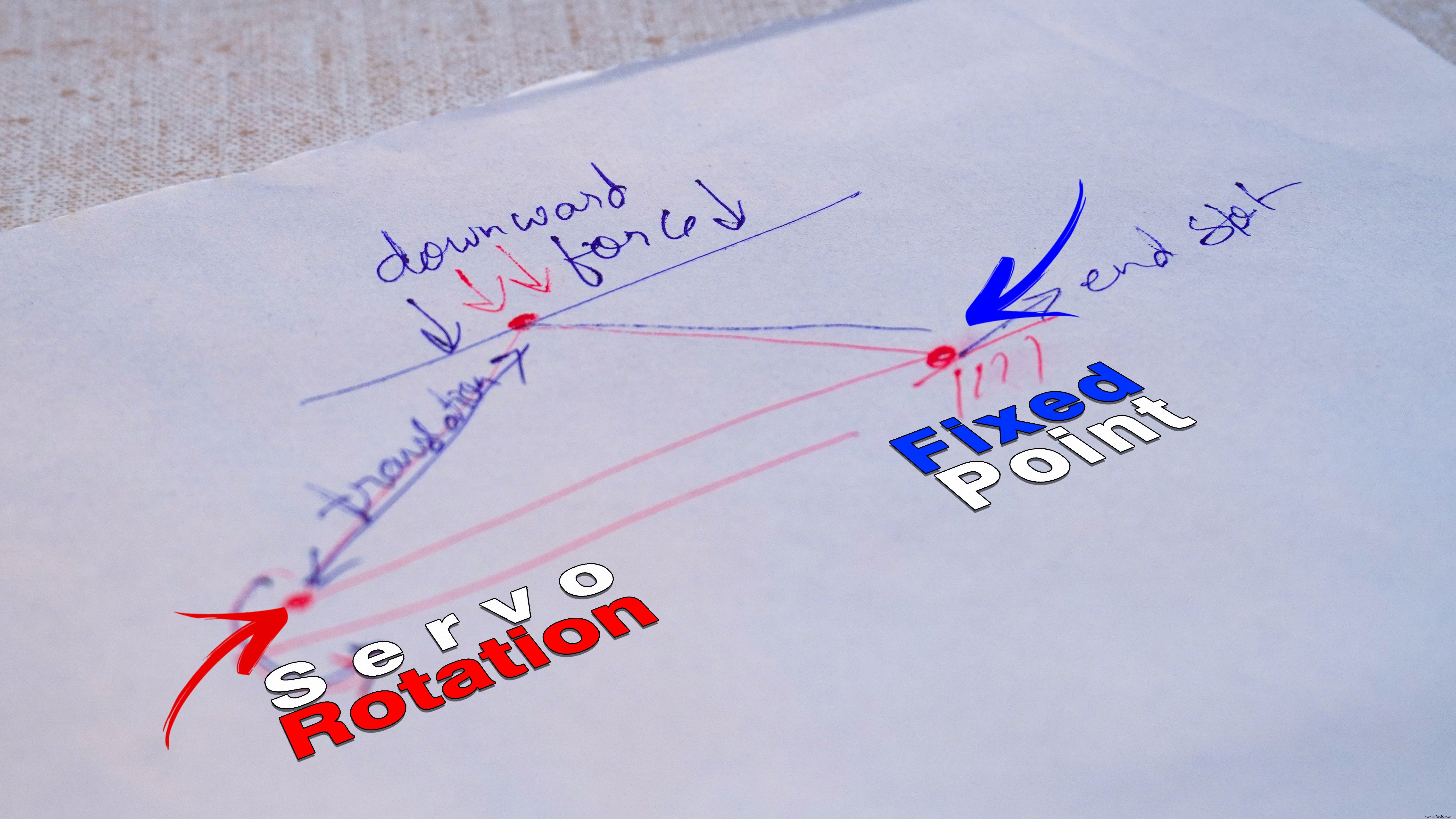
Comprenons l'arrangement mécanique avant de commencer à le faire. Nous aurons besoin d'un mécanisme ce qui créera une force pour pousser la buse vers le bas et distribuer le liquide, puisque nous utilisons un servomoteur, qui fournit un mouvement circulaire, il ne peut à lui seul créer une force vers le bas, nous aurons besoin d'une sorte d'arrangement mécanique pour y arriver, nous utiliserons un mécanisme de poulie pour fixer une extrémité et convertir la force de rotation en poussée, nous pouvons le faire en utilisant du fil de cuivre pour créer une force vectorielle vers le bas pour la transmission, ce qu'il fait essentiellement, c'est convertir la force circulaire du servo en un vecteur de force agissant vers le bas, pour simuler la poussée. mais tout cela semble compliqué, alors exécutons cette tâche petit à petit, en suivant les étapes suivantes
Étape 5 :Connexions
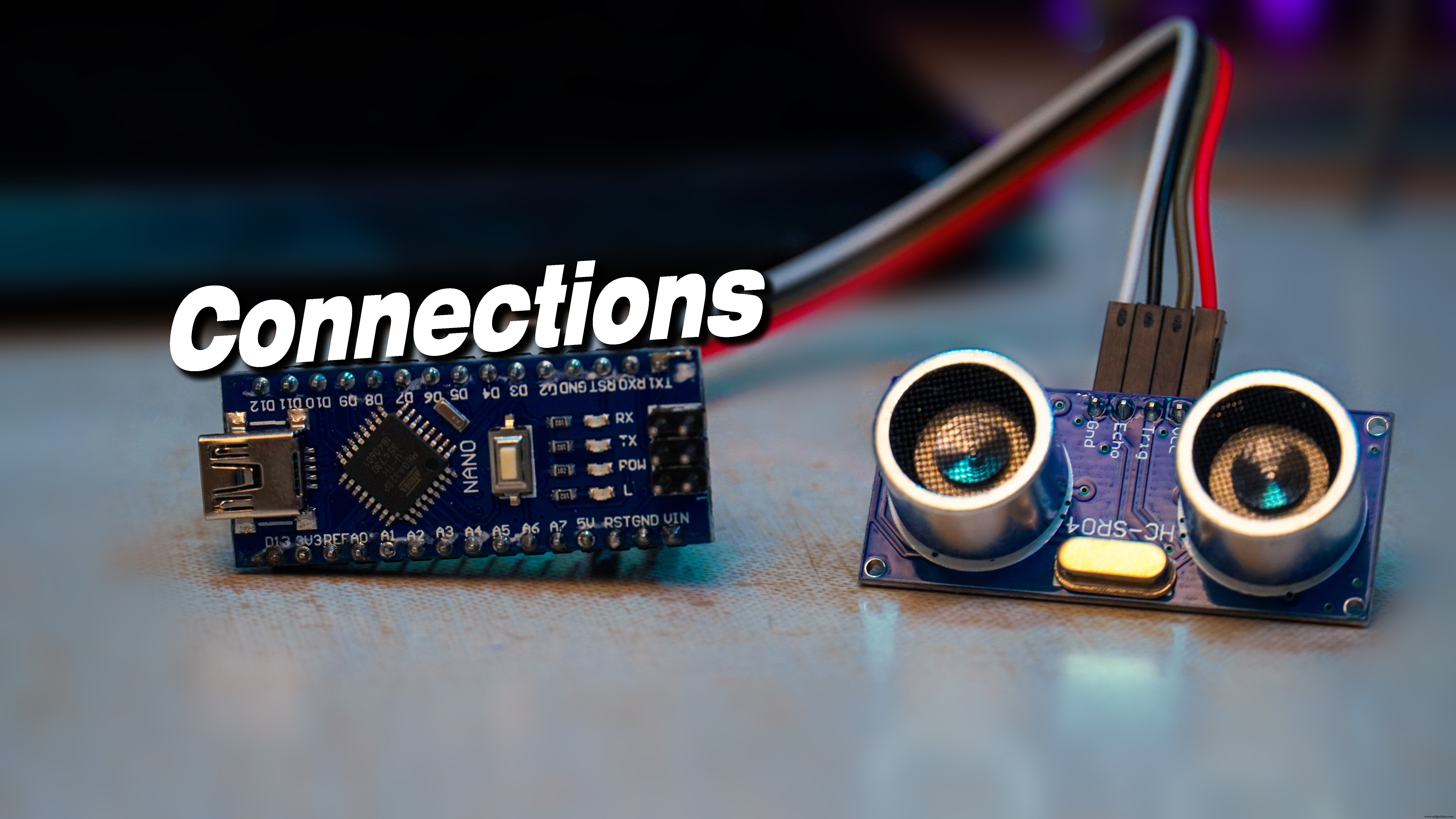
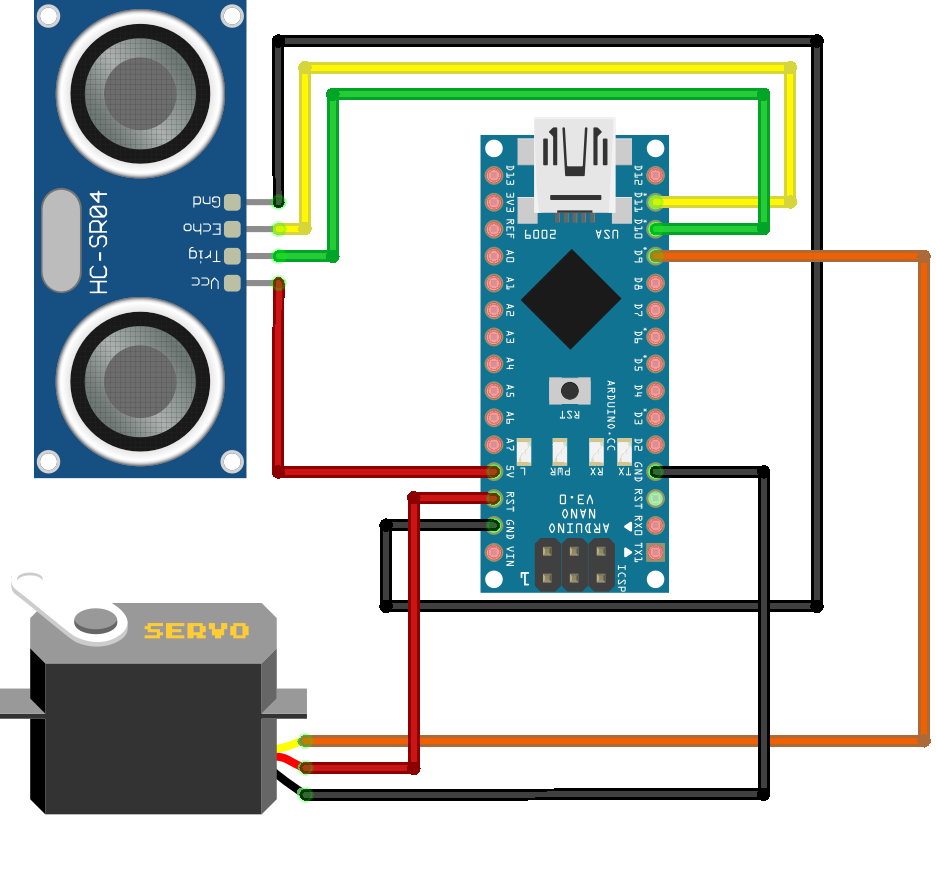
Les connexions pour cette version sont très simples !
Capteur vers Arduino :
Déclenchement à D10
Écho à D11
Vcc à Vcc
Gnd à Gnd
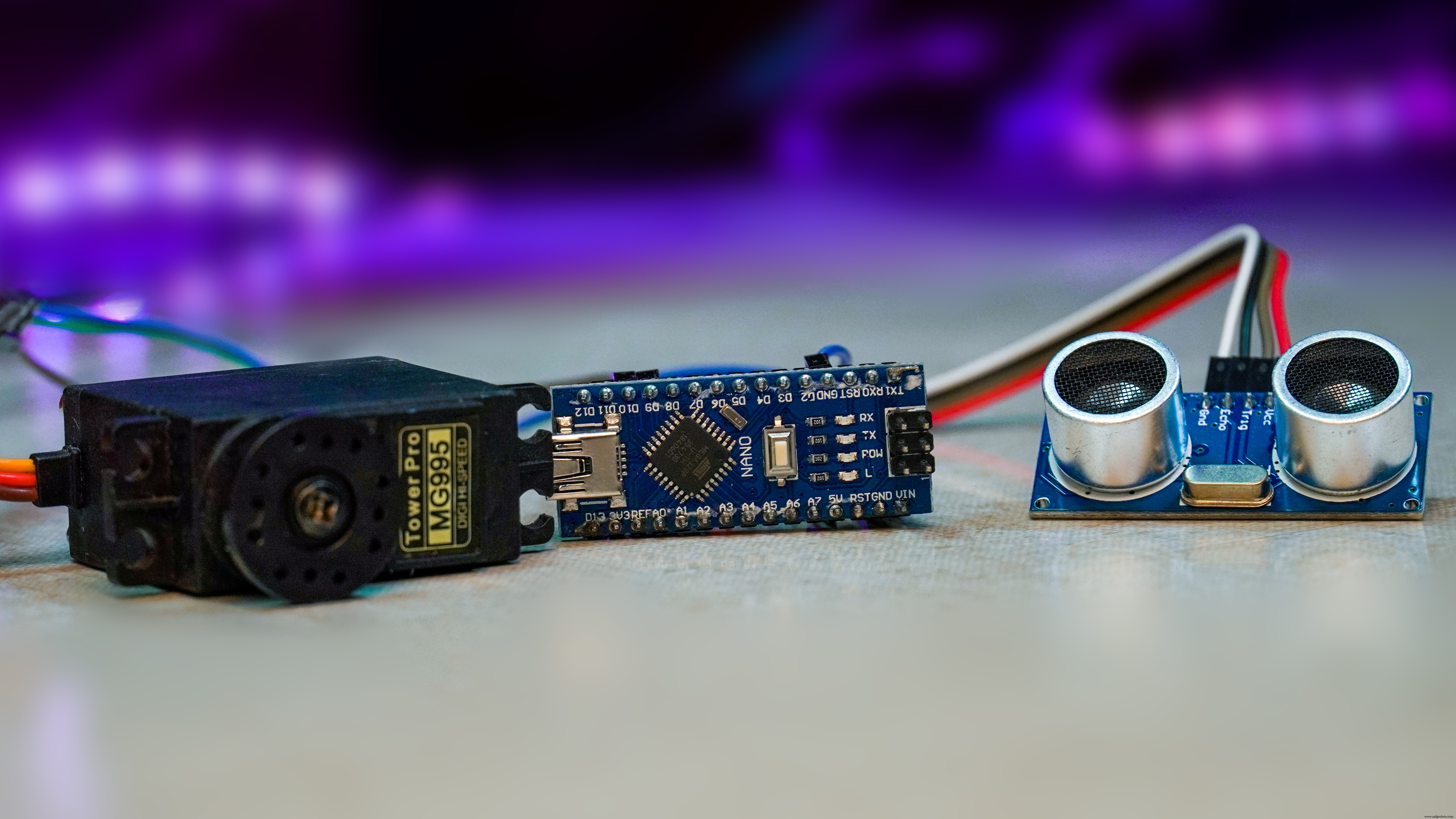
Servo vers Arduino :
Signal à D9
Vcc à Vin
Gnd à Gnd
(vous pouvez vous référer à ce message pour les bases et le fonctionnement des ultrasons, consultez également www.utsource.net pour les composants)
Connexions.fzz
Étape 6 :Attachez le servo à la base



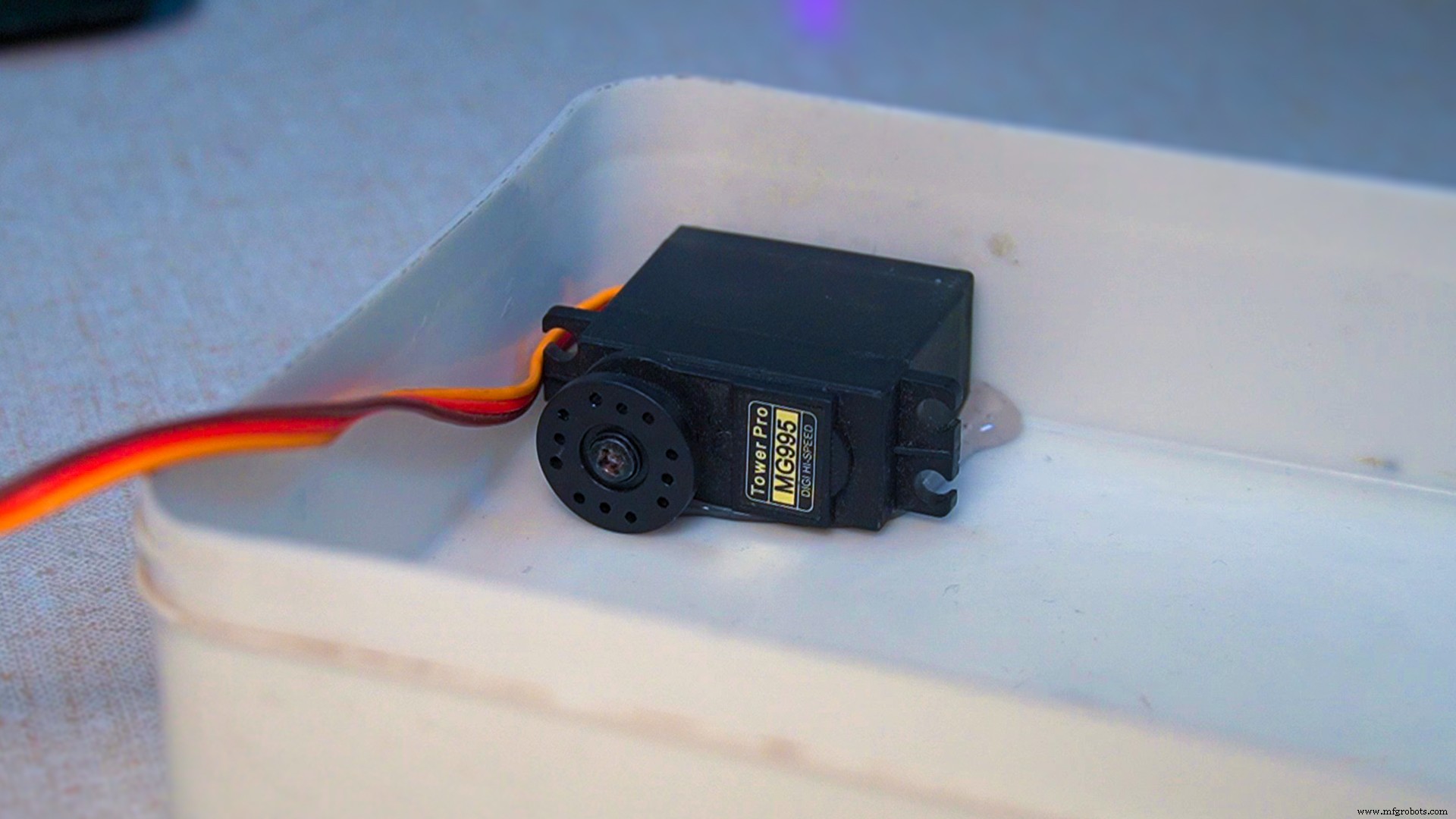
La première étape de l'arrangement mécanique consiste à fixer le servomoteur à une surface rigide à l'intérieur de la boîte, en utilisant de la colle chaude
(attention lors de l'utilisation de la colle chaude)
Étape 7 :passez le fil de cuivre à travers le bras servo
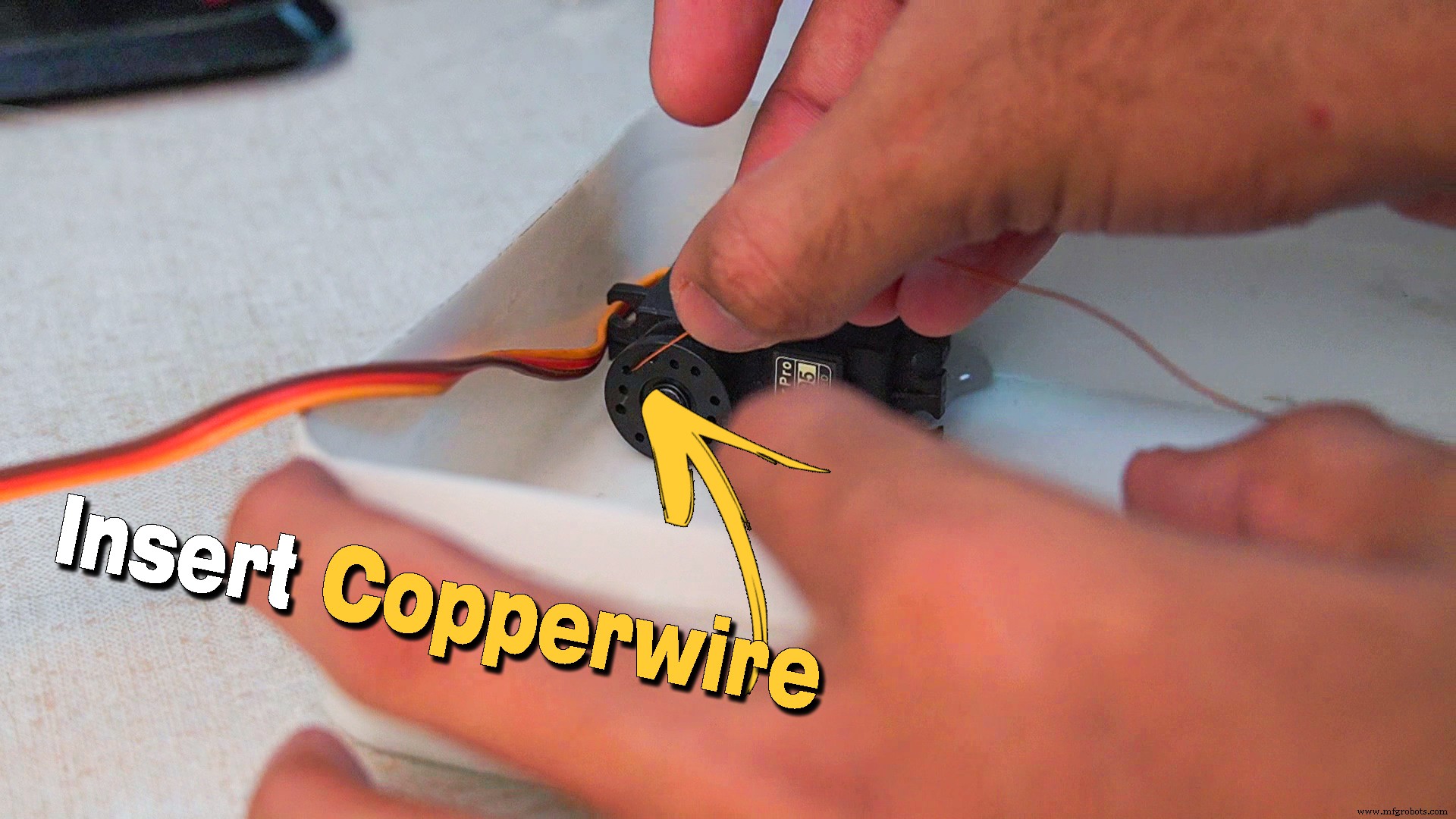
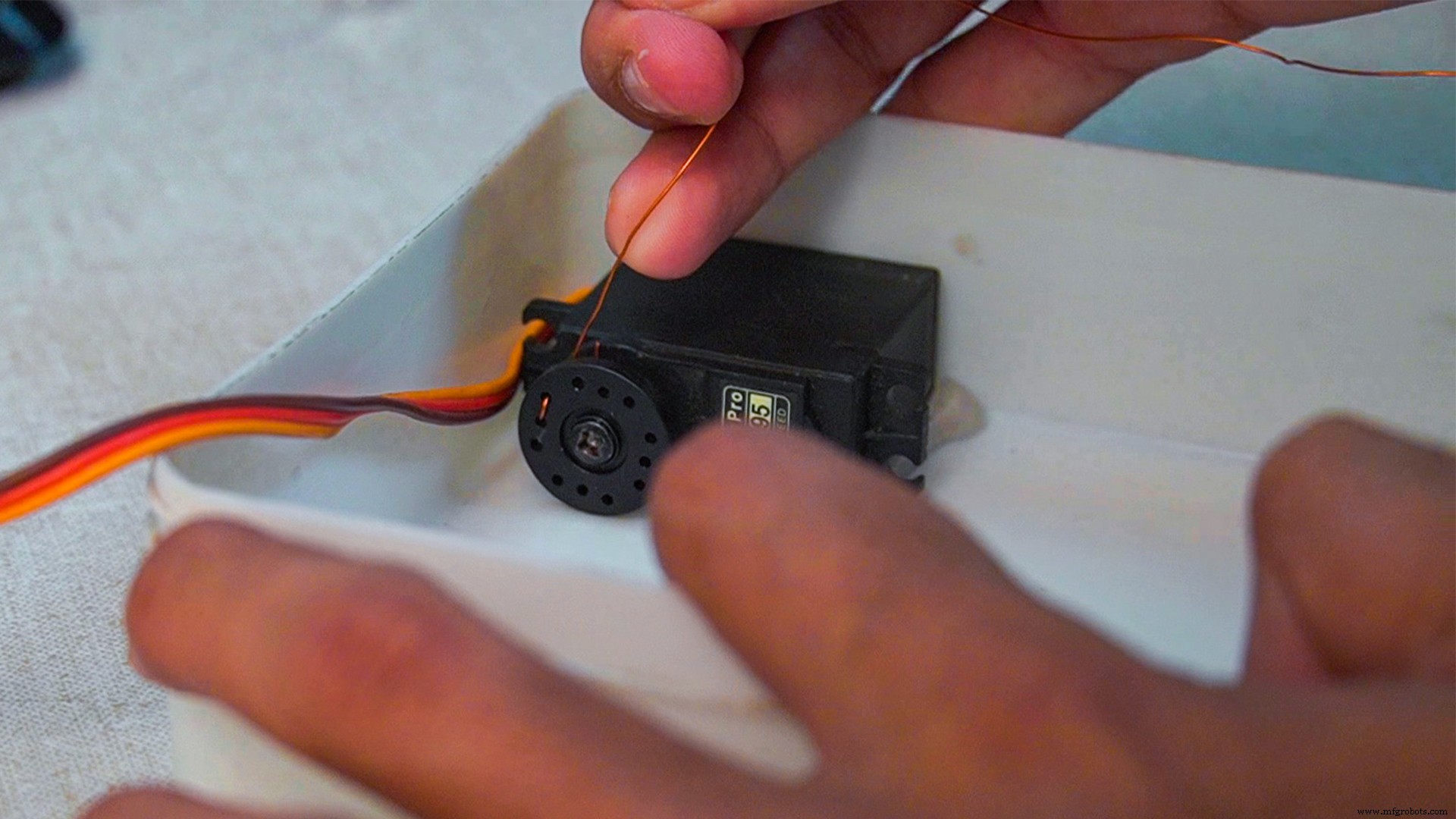
Passer le fil de cuivre à travers Servomoteur utilisant les trous sur le bras de fixation, passer au moins à travers 2 trous pour assurer une tension appropriée est obtenue en utilisant le bras de fixation circulaire serait un meilleur choix, car un droit peut se coincer à l'intérieur de l'enceinte.
Étape 8 :Ajoutez un morceau de bâton de colle chaude avec un trou au milieu



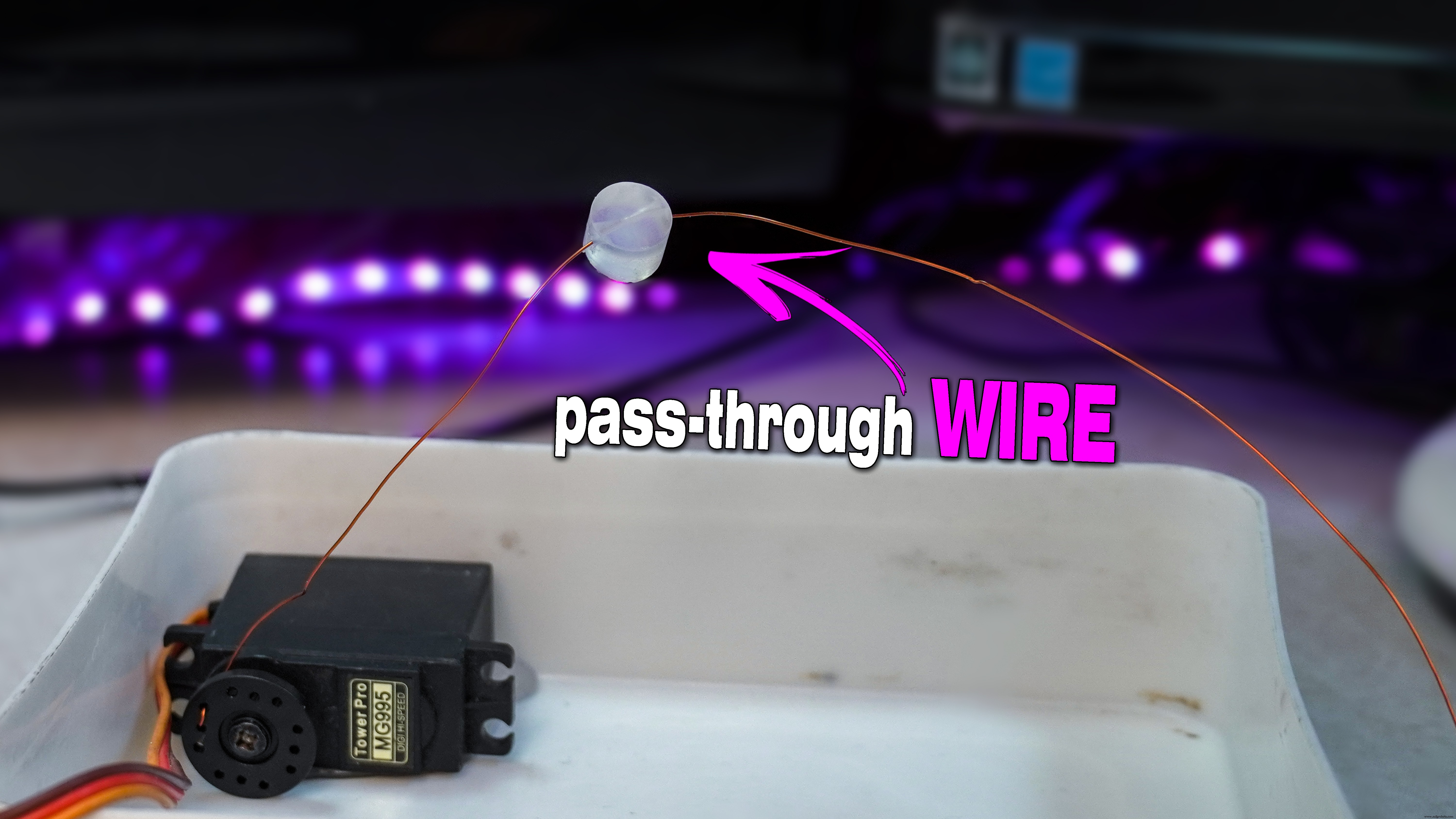
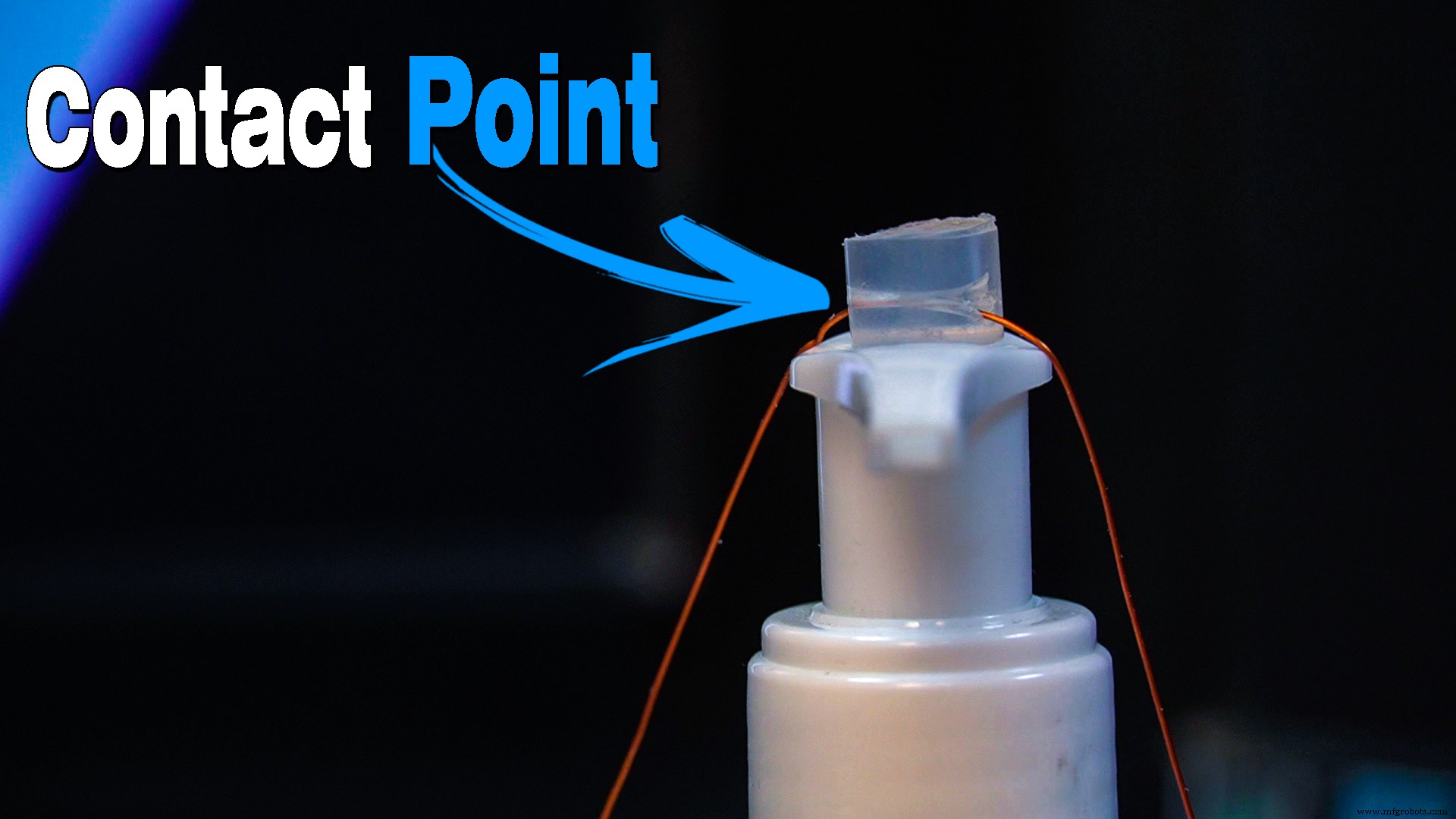
Couper environ 2 cm long morceau de Bâton de colle chaude et faire un trou au milieu, passez le fil de cuivre à travers le morceau de bâton de colle chaude, ce qui contribuera en effet à augmenter la surface au point de contact,
Étape 9 :Vis d'extrémité
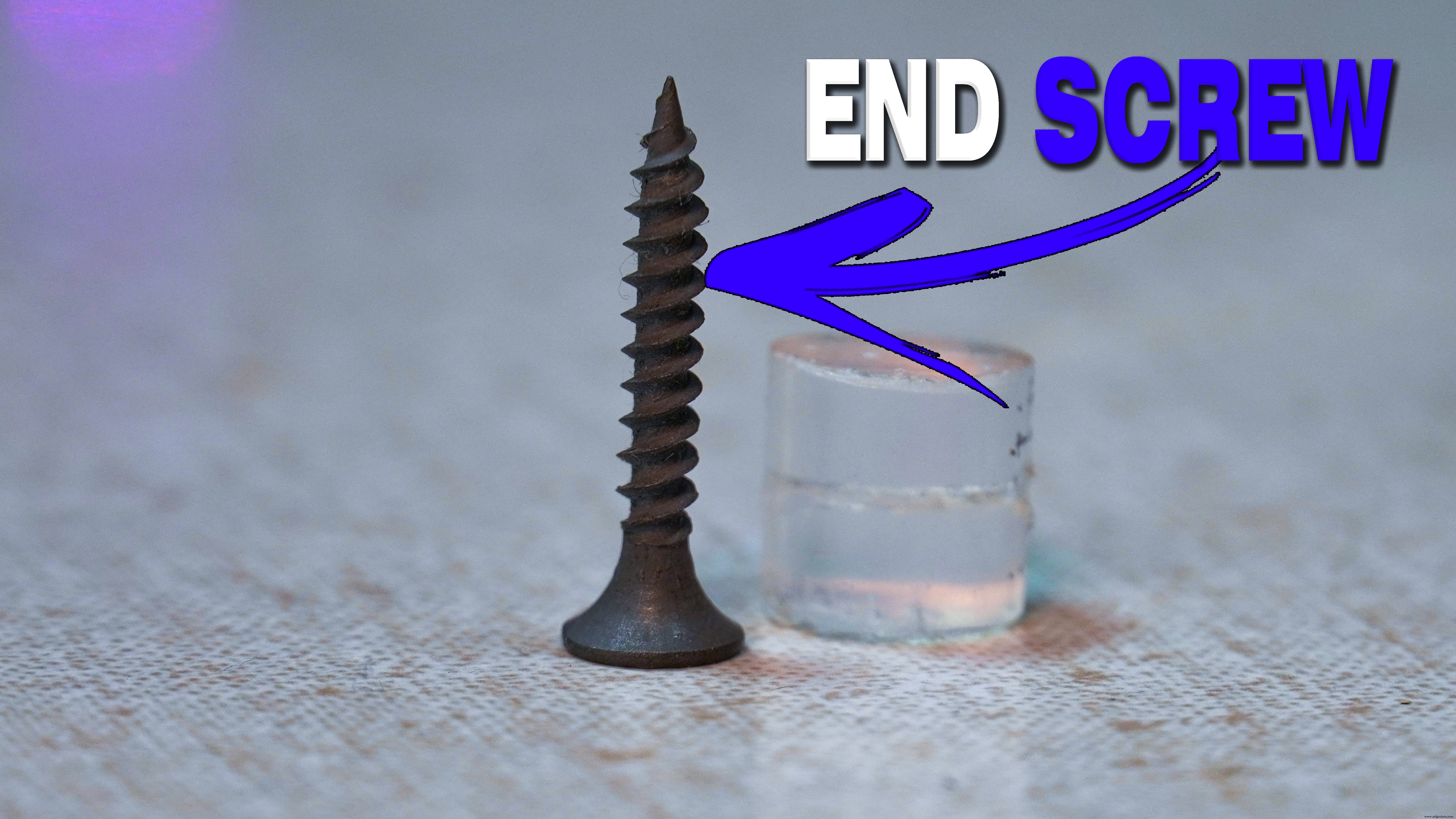
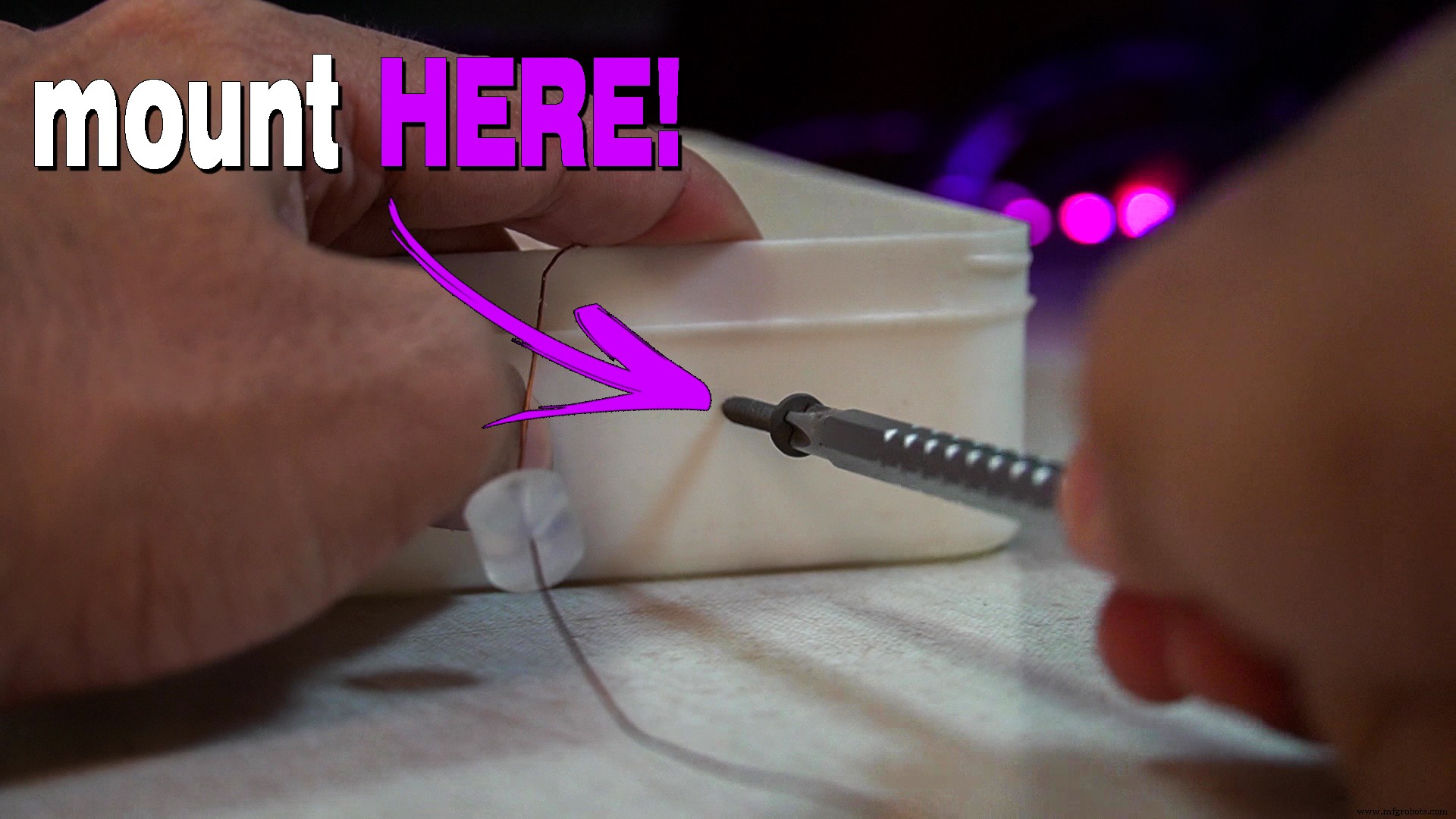

Joindre la deuxième extrémité du fil à une autre surface rigide (face opposée du servomoteur), à l'aide de une vis autotaraudeuse ou un clou ici serait un choix d'étau puisqu'il nous permettra d'ajuster la tension ou de retirer le flacon pour le remplir.
Étape 10 : Télécharger le code
En théorie, notre idée semble parfaite, codons cet Arduino et testons notre idée dans le monde réel.
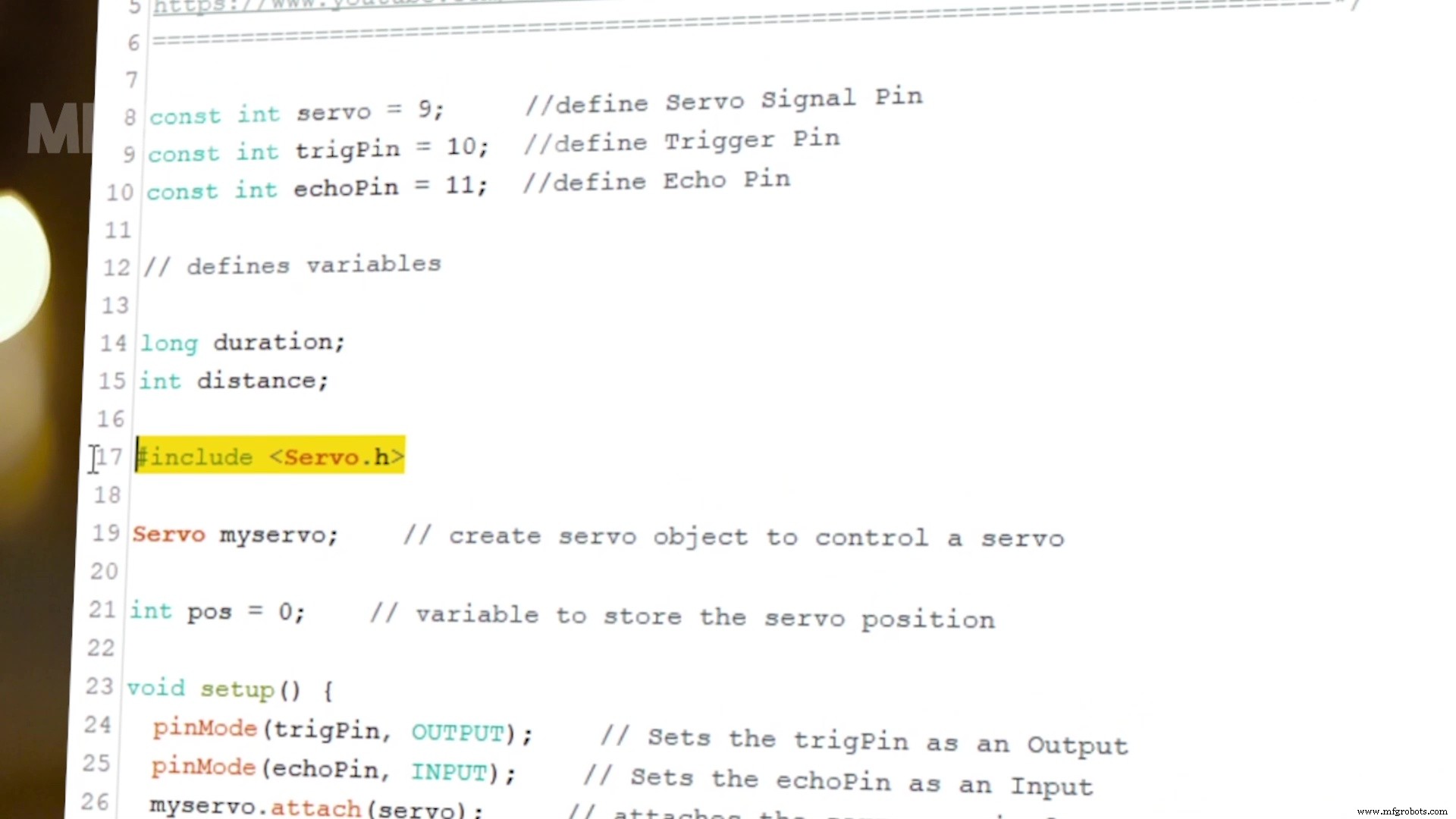
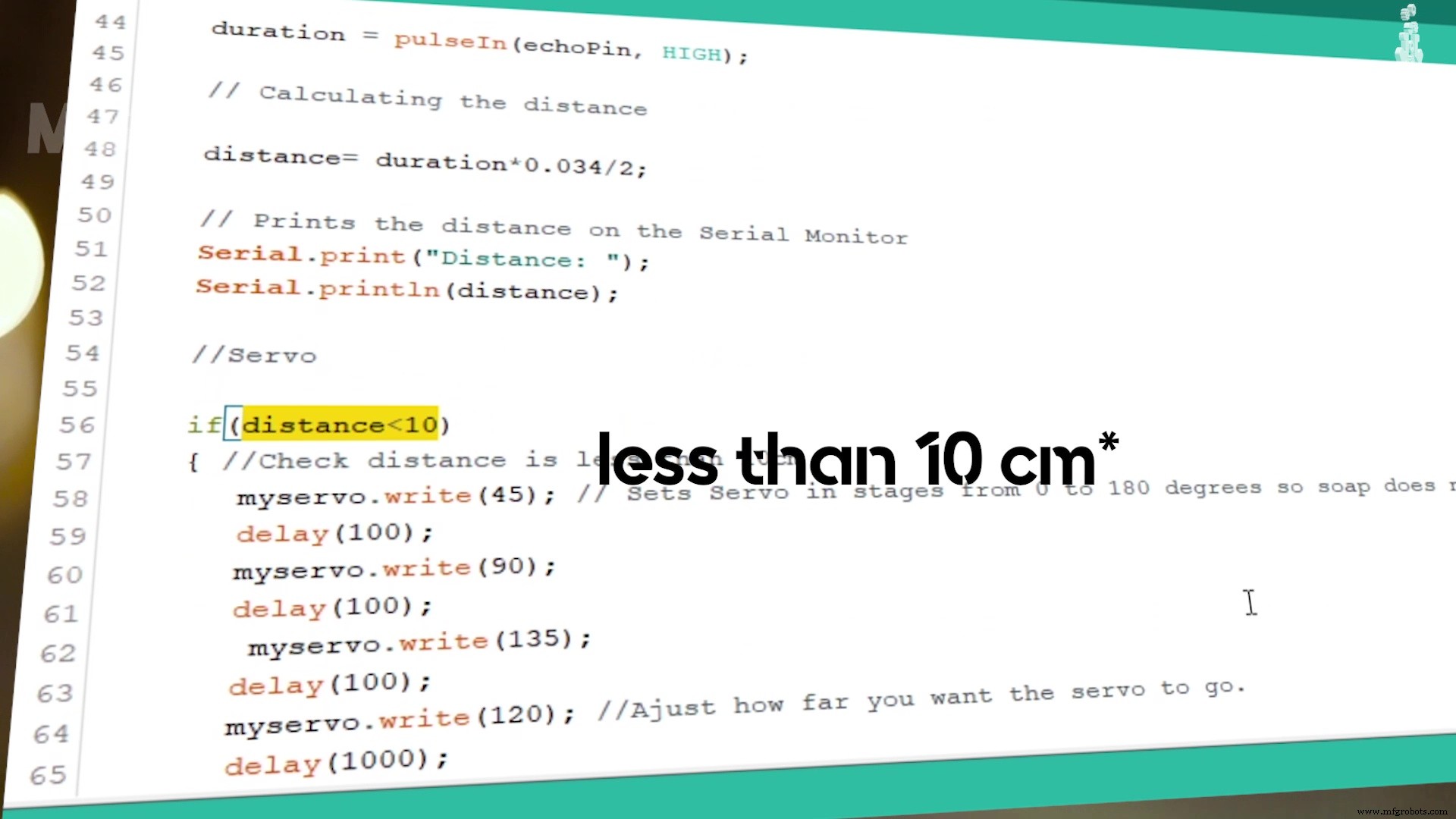
Le code est très simple à comprendre, nous avons utilisé la bibliothèque servo , et configurations de base définies et variables, le code principal est tel qu'il calcule la distance en centimètres et si la distance est inférieure à 10 cm le servo le moteur effectue un balayage mouvement pour libérer le liquide.
vous pouvez trouver la bibliothèque pour Servo ici.
il y a quelques mises à jour dans le code, veuillez trouver le code ici https://minov.in/diy-hand-sanitizer-dispenser-using-arduino/ le code est joint à cette étape (parfois, la copie du code ci-dessus ne fonctionne pas, veuillez donc le télécharger de https://minov.in/diy-hand-sanitizer-dispenser-using-arduino/)
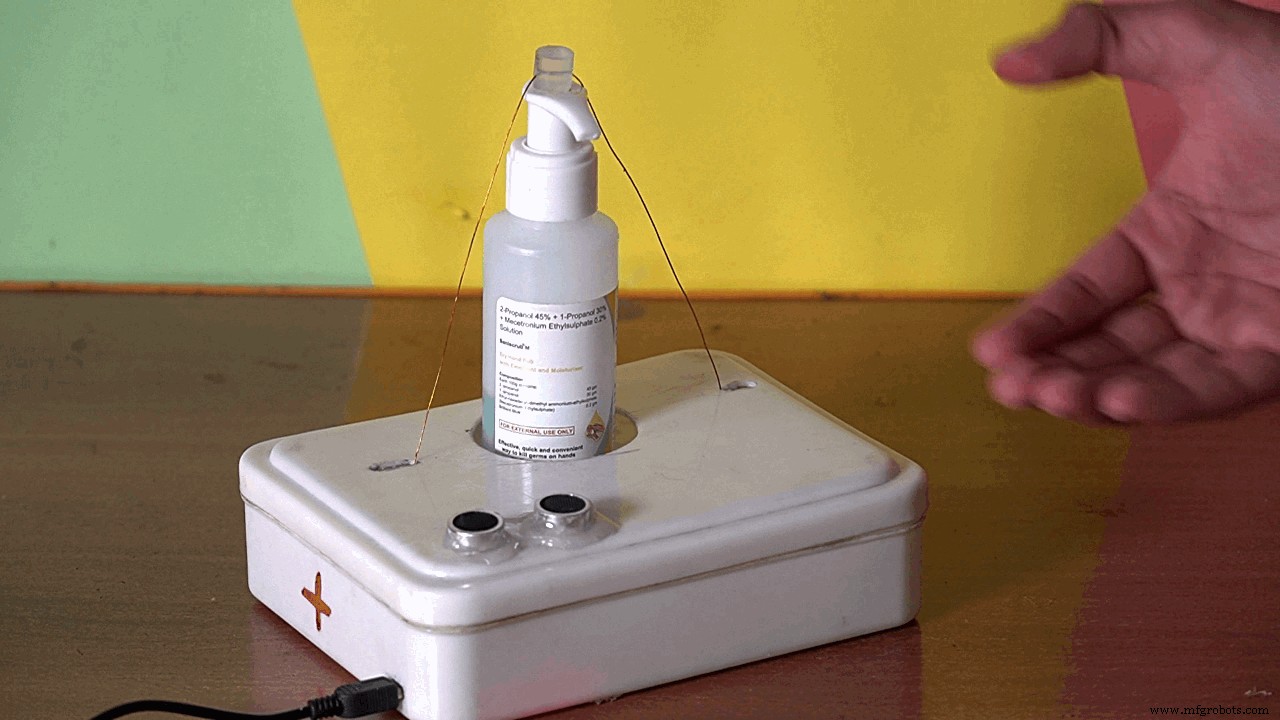
Étape 11 :Tester

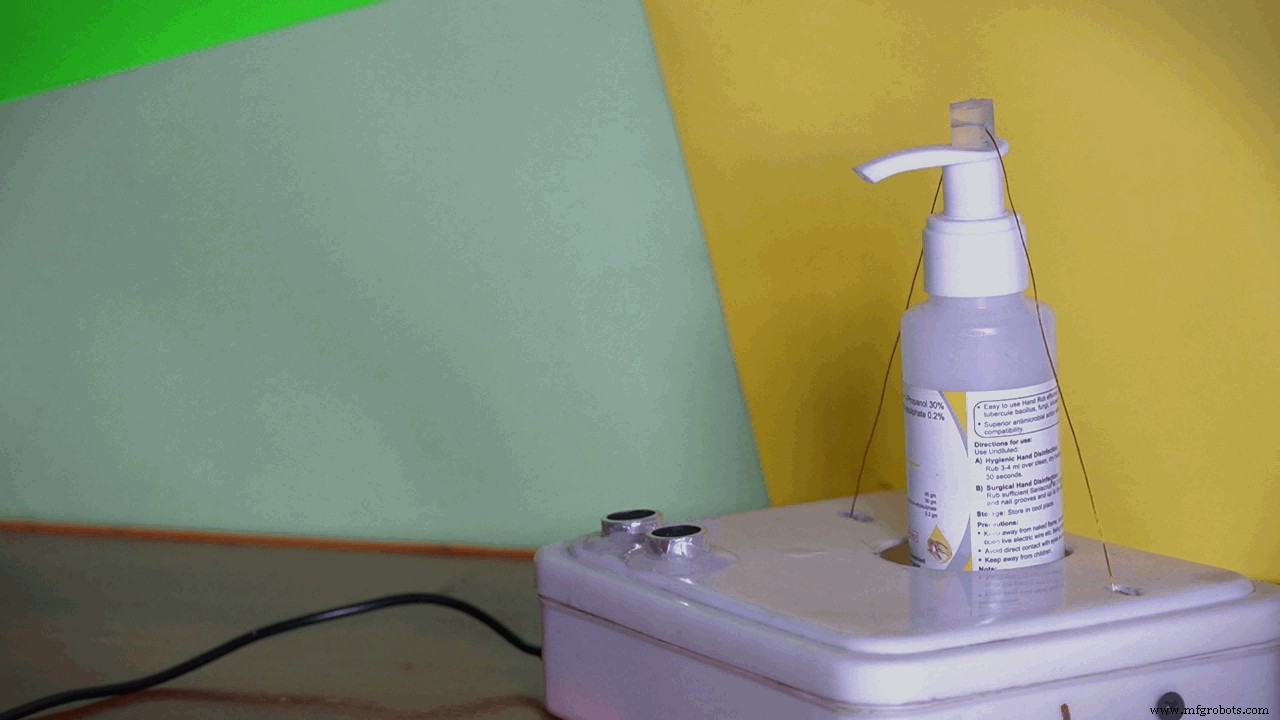
Une fois notre code téléchargé, il serait judicieux de Test ce projet avant de terminer cette enceinte.
dans ce test nous pouvons clairement voir quand notre main est placé au-dessus du capteur et distance pour les chutes ultrasonores inférieures à 10 cm, servo le moteur est enclenché et un désinfectant alcoolisé pour les mains est distribué.
une fois que le projet fonctionne correctement, nous pouvons passer à l'étape suivante !
Étape 12 :Remplissez le boîtier


Une fois que notre projet semble fonctionner, il est temps de terminer l'enceinte.
suivez les étapes pour le compléter :
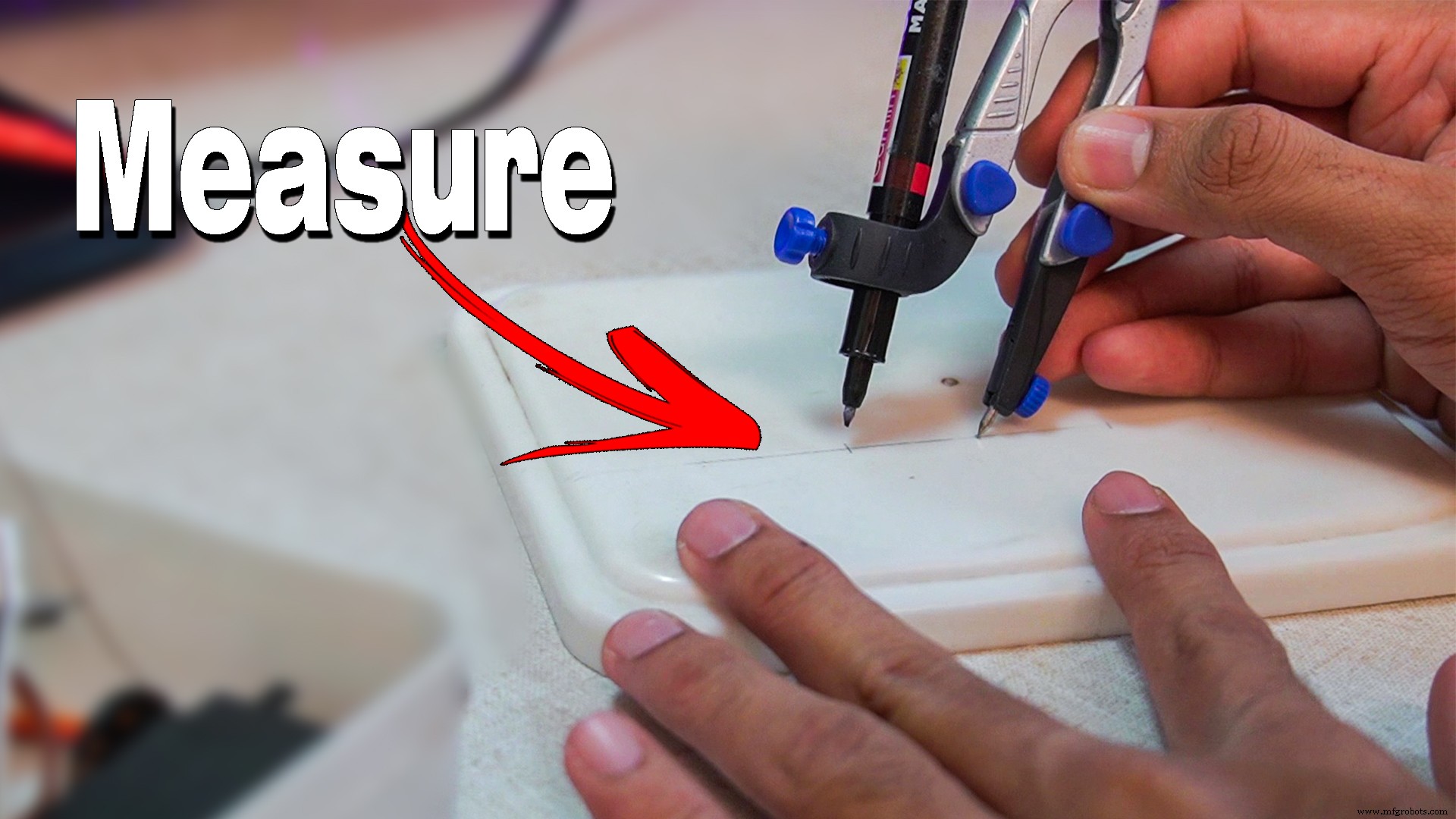
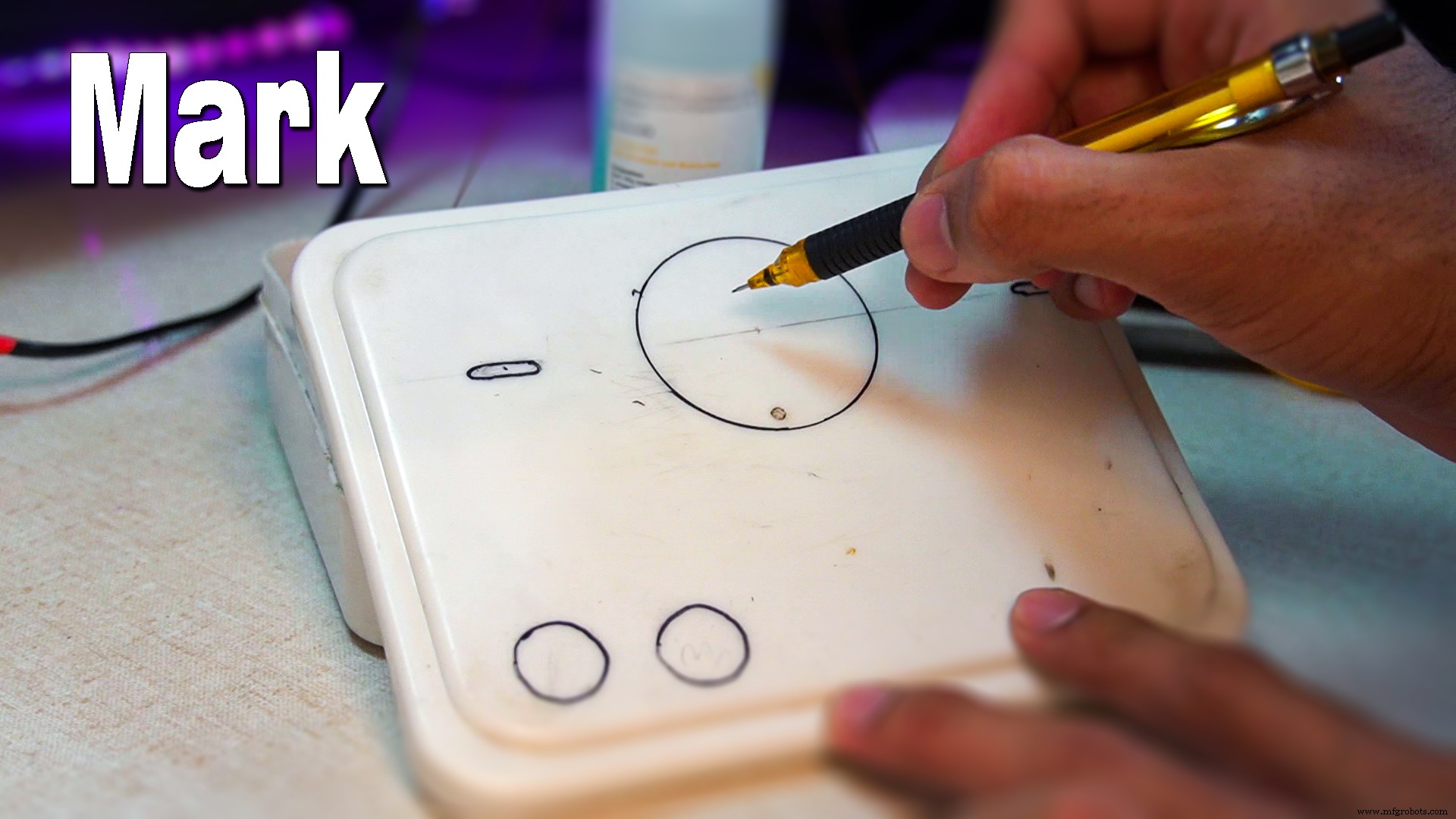
- mesurez les dimensions du capteur à ultrasons et des trous pour la bouteille.
- créez une fente pour le fil de cuivre avec un espace supplémentaire pour le moment.
- marquez tous les trous de coupe.
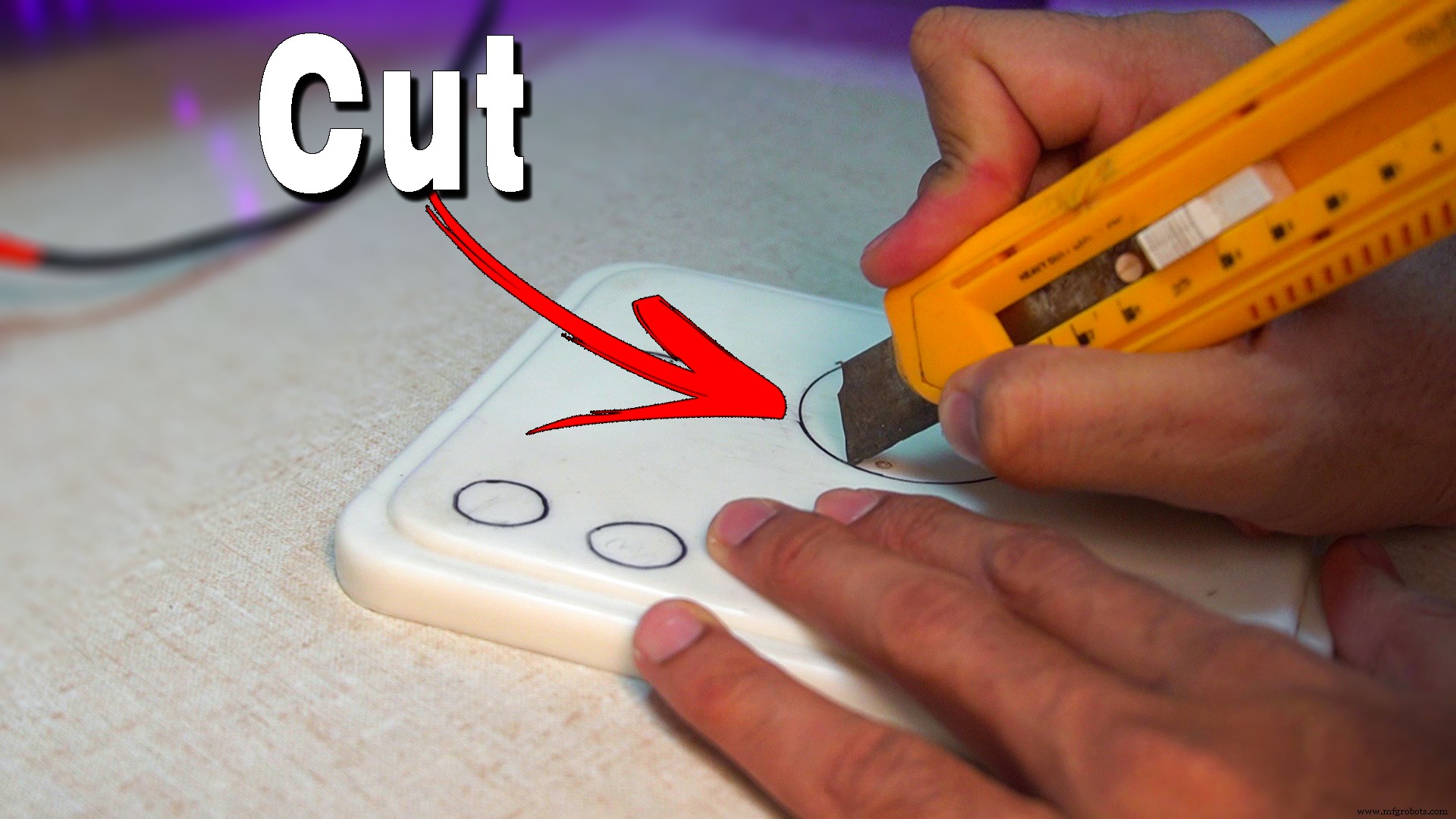
- utilisez une lame tranchante ou une perceuse pour tracer les trous.
- réparez tout à l'aide de colle chaude.
Et enfin ce projet prend vie.
Étape 13 :Tout est prêt !
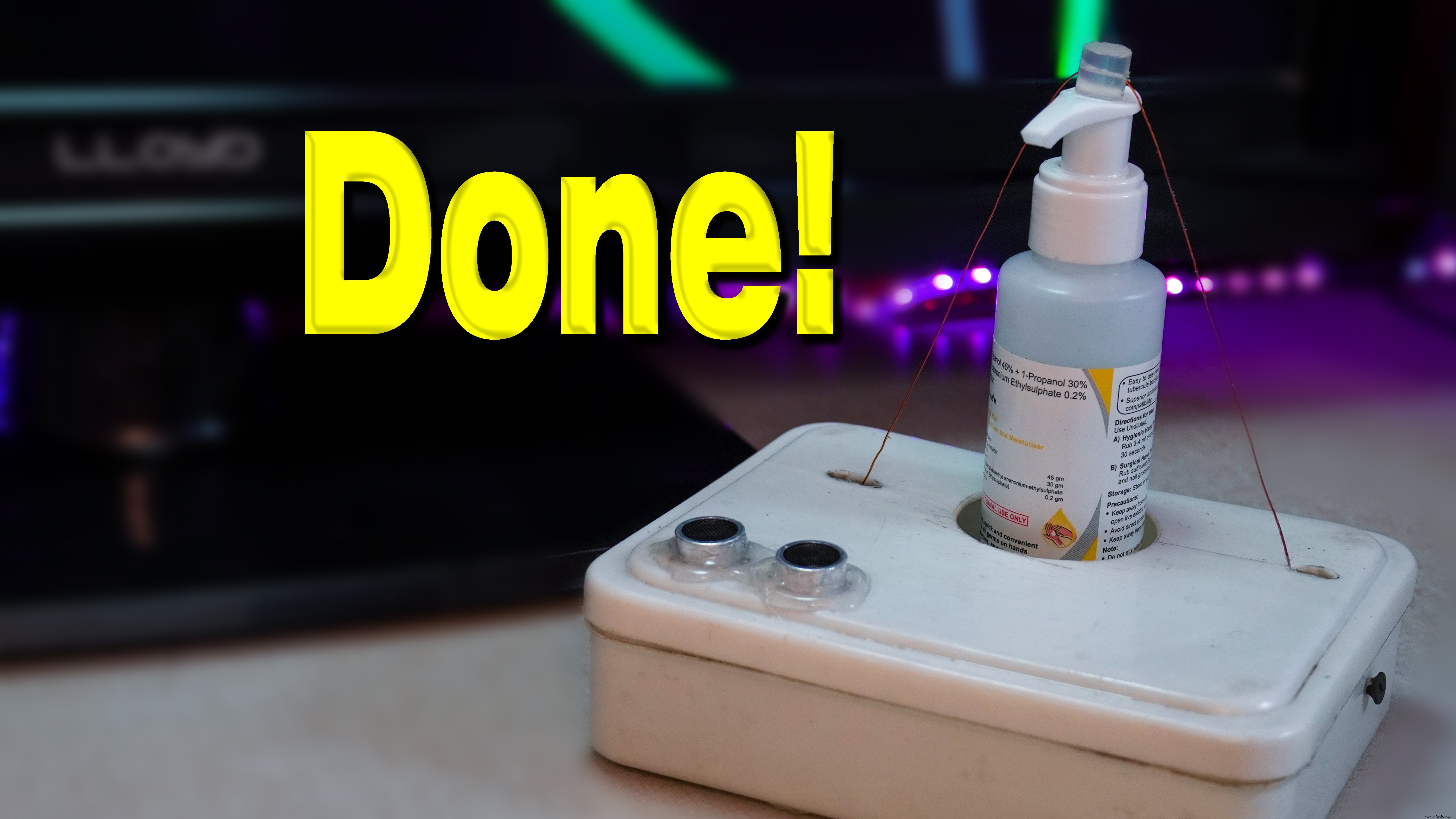
Enfin ce projet est terminé !
Étape 14 :Faites un don !

La plupart des pièces utilisées dans ce projet seraient utiles à beaucoup de gars, donc je vous demanderais à tous de faire ce projet et de faire un don à Hôpitaux ou toute personne dans le besoin, je fais personnellement don de ce projet à une force de travail essentielle. Partagez cette vidéo avec tous vos amis ingénieurs et commençons un moment, réalisons ce projet, taguez-nous sur Instagram en utilisant l'identifiant @officialmissioncritical, il est temps de contribuer à la communauté et de montrer la puissance de notre communauté Arduino pour lutter contre ce problème mondial !
( nous n'avons pas besoin d'argent, nous avons juste besoin de vous pour faire un don de tout type de projet innovant qui aiderait à combattre la cause ! )
Code
Github
https://github.com/arduino-libraries/Servohttps://github.com/arduino-libraries/ServoSchémas
connections_5YWkDyQBo4.fzzProcessus de fabrication
- Console d'édition Photoshop DIY utilisant Arduino Nano RP 2040
- horloge IV9 Numitron DIY la plus simple avec Arduino
- Contrôle de fer à souder DIY pour 862D+
- Voltmètre DIY utilisant Arduino et Smartphone
- Capteur de rythme cardiaque infrarouge DIY utilisant Arduino
- MotionSense
- Sonar utilisant arduino et affichage lors du traitement de l'IDE
- MobBob :Robot Arduino DIY contrôlé par smartphone Android
- Roue de mesure simple bricolage avec encodeur rotatif