


Roue de mesure simple bricolage avec encodeur rotatif
Composants et fournitures
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Outils et machines nécessaires
 |
|
Applications et services en ligne
| |
|
À propos de ce projet
Une roue de mesure est un outil de mesure de construction. La roue tourne et, en utilisant la cinématique de rotation de base (s=rθ), vous pouvez déterminer la distance entre deux points.
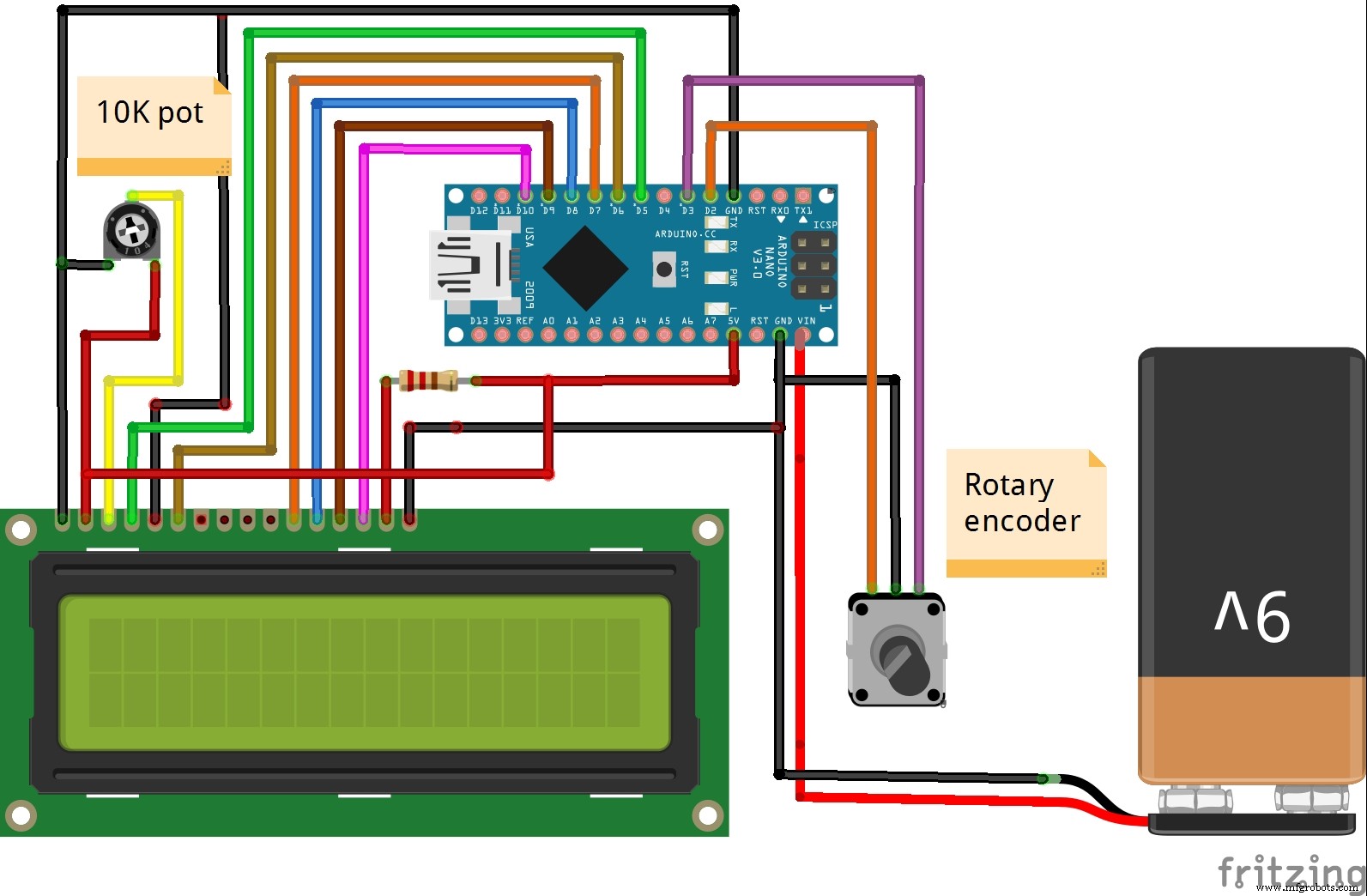
La vidéo ci-dessous montre un modèle fonctionnel réduit d'un tel appareil composé de plusieurs composants :
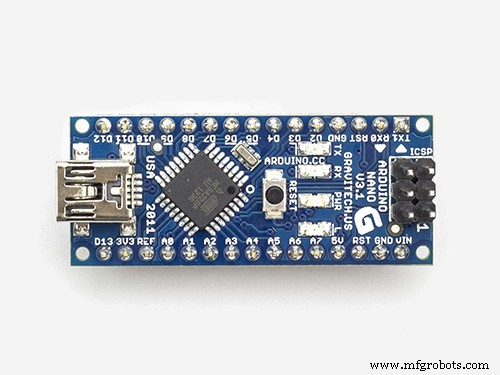
-Arduino Nano
- Encodeur rotatif
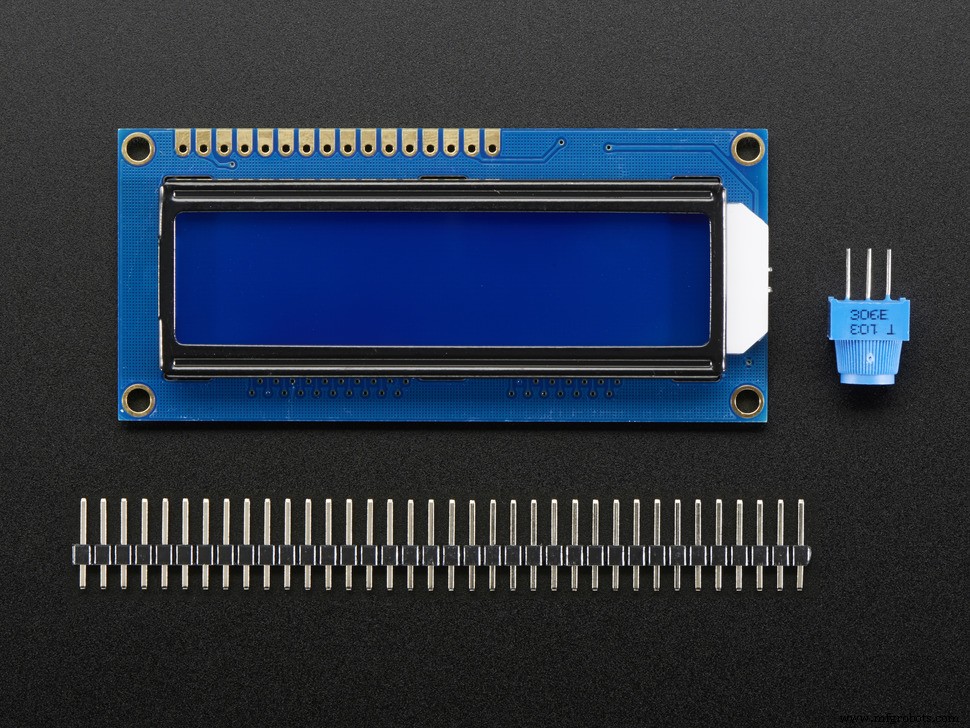
- Écran LCD 16x2
- Pot de 10k.
- Résistance 220 ohms

Le principe de fonctionnement est le suivant :
L'encodeur rotatif mesure le nombre de rotations mais nous devons convertir la rotation en distance parcourue. La distance parcourue dépend du diamètre de la roue. L'encodeur rotatif déplace N étapes en une rotation complète (360 degrés). Les pas par rotation dépendent de l'encodeur rotatif qui peut être changé de 8 à 48. Supposons que N soit les pas par rotation et R soit le rayon de la roue.
La distance parcourue en une rotation est =2xπxR
La distance parcourue en une étape est =2xπxR/N
J'ai écrit un code très simple à cet effet et la distance parcourue est affichée sur l'écran LCD en centimètres. En fonction des composants utilisés dans le code, nous modifions les valeurs de "N" et "R".
Dans mon cas la roue est réalisée sur une imprimante 3D et l'ensemble est monté sur une tige en aluminium, comme on le voit dans la vidéo.
Code
- Code
CodeC/C++
/* Mesurer la roue * * par Mirko Pavleski, * * https://www.youtube.com/channel/UCHLzc76TZel_vCTy0Znvqyw */#includeLiquidCrystal lcd(5, 6, 7, 8, 9, 10);int pin1 =2;int pin2 =3;int Pos =0; int État;int LastState; const float pi =3,14;const float R =3,25;const int N =40;float distance =0;void setup() { pinMode (pin1 ,INPUT_PULLUP); pinMode (pin2, INPUT_PULLUP); lcd.begin (16, 2); lcd.print("ROUE DE MESURE"); LastState =digitalRead(pin1) ; } boucle vide() { État =digitalRead(pin1) ; if (State !=LastState){ if (digitalRead(pin2) !=State) { Pos ++; } else { Pos --; } } distance =((2*pi*R)/N) * Pos; lcd.setCursor(0, 1); lcd.print( distance); lcd.setCursor(5, 1); lcd.print("cm "); Dernier État =État ; }
Schémas
Processus de fabrication
- horloge IV9 Numitron DIY la plus simple avec Arduino
- Jeu de gyroscope Arduino avec MPU-6050
- Capteur d'obstacles simple avec Arduino
- Voltmètre DIY avec Arduino et un écran Nokia 5110
- MobBob :Robot Arduino DIY contrôlé par smartphone Android
- Jauge IoT avec Arduino, Yaler et IFTTT
- Fréquencemètre simple bricolage jusqu'à 6,5 MHz
- Moniteur de qualité de l'air DIY avec capteur Sharp GP2Y1010AU0F
- Réveil simple avec DS1302 RTC