Code
hydraulic.inoArduino
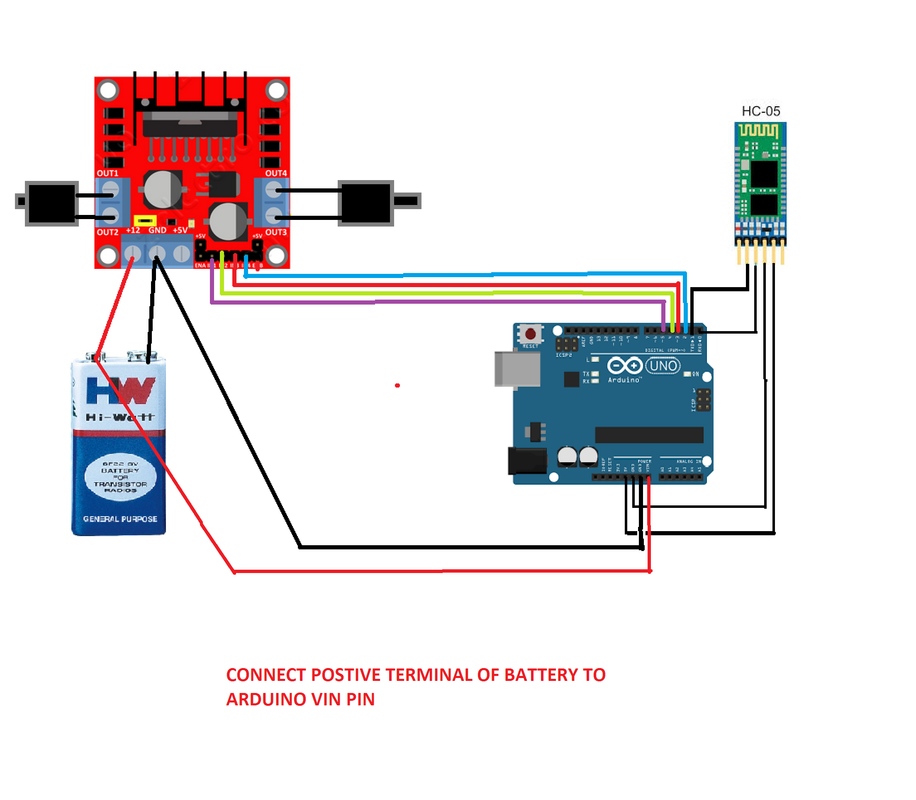
// 1er et 2ème pilote de moteur est pour le contrôle ARM// 3ème pilote de moteur est pour la partie LOCOMOTIVE//1er pilote de moteur [BASE(2,3) AND SHOULDER(4,7)]int m1IN1 =2 ; //in1int m1IN2 =3; //in2int m1IN3 =4; //in3int m1IN4 =5; //in4int m1ENA =6; // pour le contrôle de la vitesse, le contrôle de la vitesse n'est pas utilisé ici, donc gardez-le ÉLEVÉ lorsqu'il est en mouvement et rendez-le BAS pour arrêter le moteurint m1ENB =7; // pour le contrôle de la vitesse, le contrôle de la vitesse n'est pas utilisé ici, donc gardez-le HAUT lorsqu'il est en mouvement et rendez-le BAS pour arrêter le moteur//2ème pilote de moteur [COUDE (8,9) ET PINCE (12,13)]int m2IN1 =8 ; //in1int m2IN2 =9; //in2int m2IN3 =10; //in3int m2IN4 =11; //in4int m2ENA =12; // pour le contrôle de la vitesse, le contrôle de la vitesse n'est pas utilisé ici, donc gardez-le ÉLEVÉ lorsqu'il est en mouvement et rendez-le BAS pour arrêter le moteurint m2ENB =13; // pour le contrôle de la vitesse, le contrôle de la vitesse n'est pas utilisé ici, donc gardez-le HAUT lorsqu'il est en mouvement et rendez-le BAS pour arrêter le moteur//3ème pilote de moteur [CAR (INI,IN2)=RIGHT (IN3,IN4)=LEFT]int m3IN1=14 ; // in1 14- broche A0 sur arduinoint m3IN2=15; // in2 15-A1int m3IN3=16; // in3 16-A2int m3IN4=17; // in4 17-A3int m3ENA=18; // ena 18-A4 ,ici vous pouvez utiliser le contrôle de vitesse pour contrôler la vitesse de la partie locomotive, pour cela vous devez utiliser analogWrite() au lieu de digitalWrite()int m3ENB=19; // enb 19-A5, ici vous pouvez utiliser le contrôle de vitesse pour contrôler la vitesse de la partie locomotive, pour cela vous devez utiliser analogWrite() au lieu de digitalWrite()void setup(){ pinMode(m1IN1,OUTPUT); pinMode(m1IN2,OUTPUT); pinMode(m1IN3,OUTPUT); pinMode (m1IN4, SORTIE); pinMode(m2IN1,OUTPUT); pinMode(m2IN2,OUTPUT); pinMode(m2IN3,OUTPUT); pinMode (m2IN4, SORTIE); pinMode(m1ENA,SORTIE); pinMode(m1ENB,SORTIE); pinMode(m2ENA,SORTIE); pinMode(m2ENB,SORTIE); pinMode(m3IN1,OUTPUT); pinMode(m3IN2,OUTPUT); pinMode(m3IN3,OUTPUT); pinMode (m3IN4, SORTIE); pinMode(m3ENA,SORTIE); pinMode(m3ENB,SORTIE); Serial.begin(9600);}boucle vide(){ char ip='0'; while(Serial.available()>0) // vérifie si le port série reçoit ou non une valeur du hc05 { ip=Serial.read(); // lit les données du port série delay(10) ; } switch(ip) { case '6' :// SHOULDER UP digitalWrite(m1IN3,HIGH); digitalWrite(m1IN4,LOW); digitalWrite(m1ENA,HIGH); écriture numérique (m1ENB, ÉLEVÉ); Pause; case '5' :// ÉPAULE VERS LE BAS digitalWrite(m1IN3,LOW); écriture numérique (m1IN4, HAUT); digitalWrite(m1ENA,HIGH); écriture numérique (m1ENB, ÉLEVÉ); Pause; case '1' :// ELBOW UP digitalWrite(m2IN3,HIGH); écriture numérique (m2IN4, FAIBLE); digitalWrite(m2ENA,HIGH); écriture numérique (m2ENB, ÉLEVÉ); Pause; case '2' :// COUDE VERS LE BAS digitalWrite(m2IN3,LOW); écriture numérique (m2IN4, HAUT); digitalWrite(m2ENA,HIGH); écriture numérique (m2ENB, ÉLEVÉ); Pause; case '8' :// GRIP CONTRACT digitalWrite(m2IN1,HIGH); digitalWrite(m2IN2,LOW); digitalWrite(m2ENA,HIGH); écriture numérique (m2ENB, ÉLEVÉ); Pause; case '7' :// GRIP EXPAND digitalWrite(m2IN1,LOW); écriture numérique (m2IN2, HAUT); digitalWrite(m2ENA,HIGH); écriture numérique (m2ENB, ÉLEVÉ); Pause; case '3' :// BASE CLOCK digitalWrite(m1IN1,HIGH); digitalWrite(m1IN2,LOW); digitalWrite(m1ENA,HIGH); écriture numérique (m1ENB, ÉLEVÉ); Pause; case '4' :// BASE ANTICLOCK digitalWrite(m1IN1,LOW); écriture numérique (m1IN2, HAUT); digitalWrite(m1ENA,HIGH); écriture numérique (m1ENB, ÉLEVÉ); Pause; case '9' :// OFF digitalWrite(m1IN1,LOW); digitalWrite(m1IN2,LOW); digitalWrite(m1IN3,LOW); digitalWrite(m1IN4,LOW); digitalWrite(m1ENA,LOW); digitalWrite(m1ENB,LOW); digitalWrite(m2IN1,LOW); digitalWrite(m2IN2,LOW); digitalWrite(m2IN3,LOW); écriture numérique (m2IN4, FAIBLE); digitalWrite(m2ENA,LOW); digitalWrite(m2ENB,LOW); digitalWrite(m3IN1,LOW); digitalWrite(m3IN2,LOW); digitalWrite(m3IN3,LOW); écriture numérique (m3IN4, FAIBLE); digitalWrite(m3ENA,LOW); digitalWrite(m3ENB,LOW); Pause; cas 'A' :// FORWARD digitalWrite(m3IN1,HIGH); digitalWrite(m3IN2,LOW); écriture numérique (m3IN3, HAUT); écriture numérique (m3IN4, FAIBLE); digitalWrite(m3ENA,HIGH); écriture numérique (m3ENB, ÉLEVÉ); Pause; case 'D' :// BACKWARD digitalWrite(m3IN1,LOW); écriture numérique (m3IN2, HAUT); digitalWrite(m3IN3,LOW); écriture numérique (m3IN4, HAUT); digitalWrite(m3ENA,HIGH); écriture numérique (m3ENB, ÉLEVÉ); Pause; case 'B' :// RIGHT digitalWrite(m3IN1,LOW); écriture numérique (m3IN2, HAUT); écriture numérique (m3IN3, HAUT); écriture numérique (m3IN4, FAIBLE); digitalWrite(m3ENA,HIGH); écriture numérique (m3ENB, ÉLEVÉ); Pause; case 'C' :// LEFT digitalWrite(m3IN1,HIGH); digitalWrite(m3IN2,LOW); digitalWrite(m3IN3,LOW); écriture numérique (m3IN4, HAUT); digitalWrite(m3ENA,HIGH); écriture numérique (m3ENB, ÉLEVÉ); Pause; }} 






 fixer l'écrou sur le piston de la seringue à l'aide du m-seal.
fixer l'écrou sur le piston de la seringue à l'aide du m-seal.  fixez la seringue et le moteur de cette manière
fixez la seringue et le moteur de cette manière 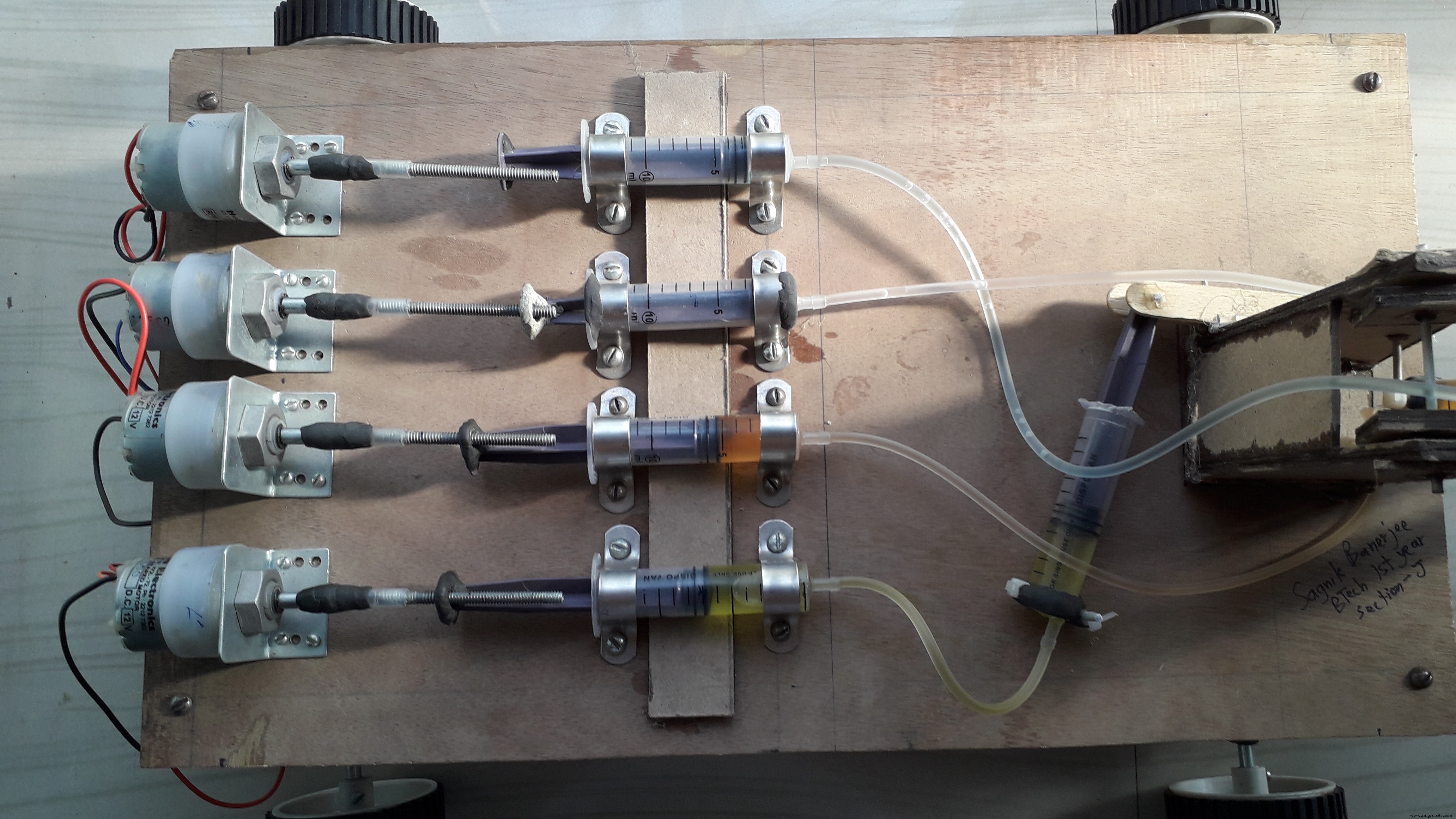 lorsque le moteur tourne dans le sens horaire, il pousse le piston et lorsqu'il tourne dans le sens antihoraire, il tire le piston
lorsque le moteur tourne dans le sens horaire, il pousse le piston et lorsqu'il tourne dans le sens antihoraire, il tire le piston  https://www.youtube.com/watch?v=lhOF6cViZ4Q
https://www.youtube.com/watch?v=lhOF6cViZ4Q 