


Convertir l'accélération en angle à partir du capteur I2C MPU6050
Composants et fournitures
 |
| × | 1 | |||
 |
| × | 1 |
Applications et services en ligne
 |
| |||
 |
|
À propos de ce projet
Il y a quelque temps, j'ai publié un tutoriel sur la façon dont vous pouvez connecter l'accéléromètre, le gyroscope et le capteur de boussole MPU9250 vers Arduino Nano et programmez-le avec Visuino pour envoyer des données par paquets et les afficher sur un Scope et des Instruments visuels.
L'Accéléromètre envoie une accélération X, Y et Z les forces. Souvent, cependant, nous devons convertir les forces en angle X, Y, Z 3D pour déterminer l'Orientation 3D du capteur. Assez peu de gens ont demandé un tel tutoriel, et finalement j'ai trouvé le temps de le faire.
Certaines personnes ont également demandé comment vous pouvez connecter et utiliser l'Accéléromètre et capteur gyroscope MPU6050 , j'ai donc décidé d'utiliser ce module pour le tutoriel au lieu du MPU9250 plus complexe et coûteux .
Dans ce tutoriel, je vais vous montrer à quel point il est facile de connecter l'Accéléromètre MPU6050 et le capteur gyroscope vers Arduino Nano , et programmez-le avec Visuino pour convertir l'Accélération dans un angle 3D X, Y, Z .
Étape 1 : Composants
- Un Arduino carte compatible (j'utilise Arduino Nano, car j'en ai une, mais toute autre ira très bien)
- Un module de capteur de gyroscope d'accélération MPU6050
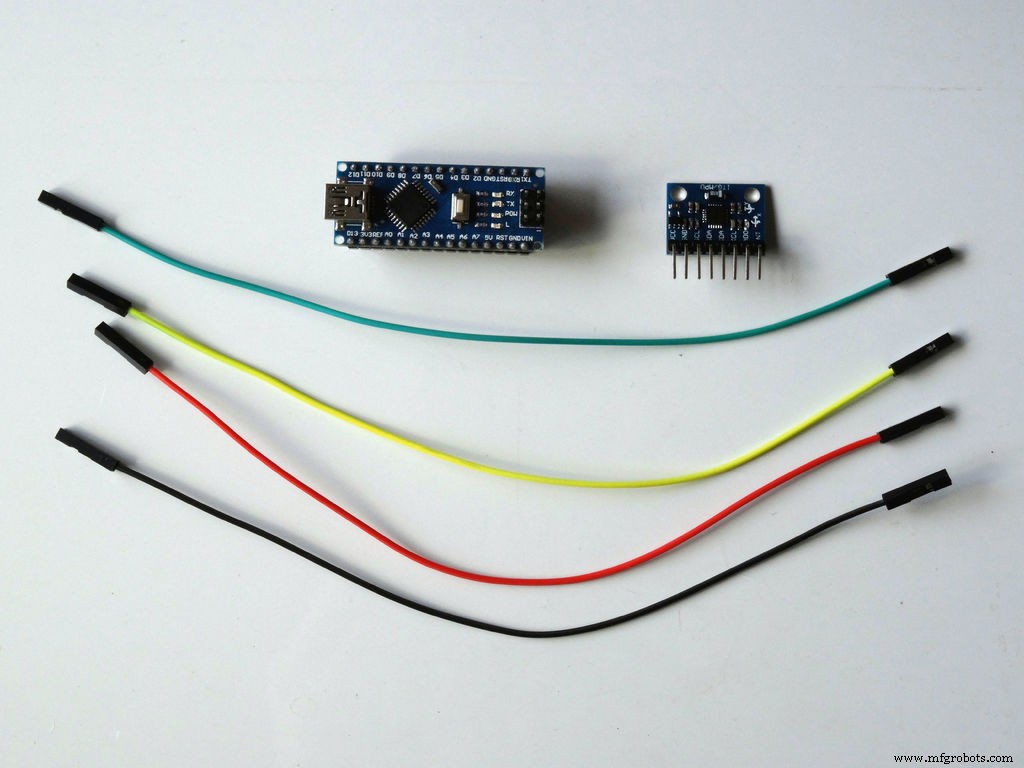
- 4 Femelle-Femelle fils de liaison
Étape 2 :connectez l'accéléromètre et le gyroscope MPU6050 à Arduino
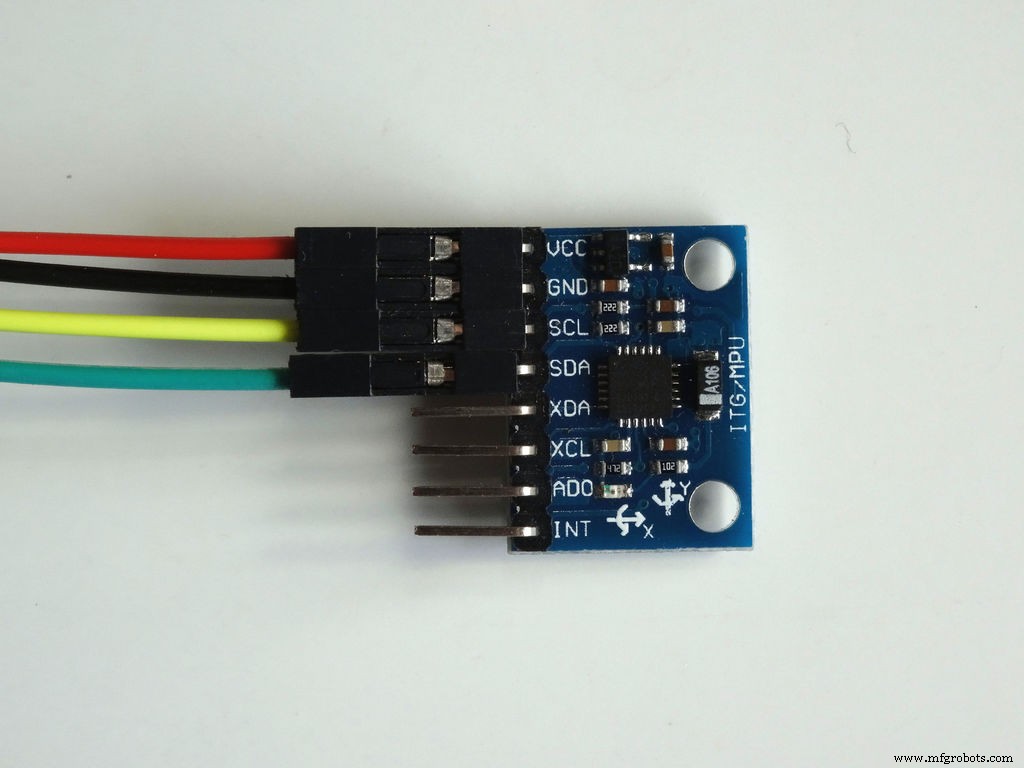
- Connectez l'alimentation VCC 5 V (Fil rouge ), Terre (Fil noir ), SCL (Fil jaune ) et SDA (Fil vert ) au module MPU6050 (Image 1 )
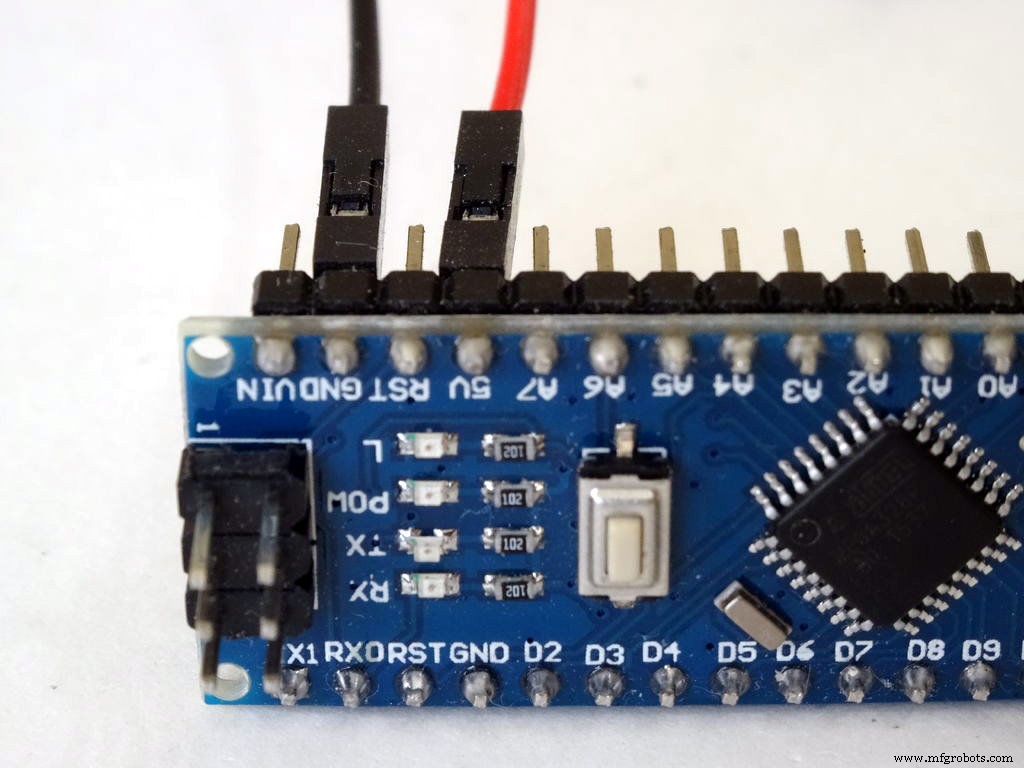
- Connectez l'autre extrémité du fil de terre (Fil noir ) à un sol broche de l'Arduino Nano tableau (Image 2 )
- Connectez l'autre extrémité du fil d'alimentation VCC 5 V (Fil rouge ) au 5V broche d'alimentation de l'Arduino Nano tableau (Image 2 )
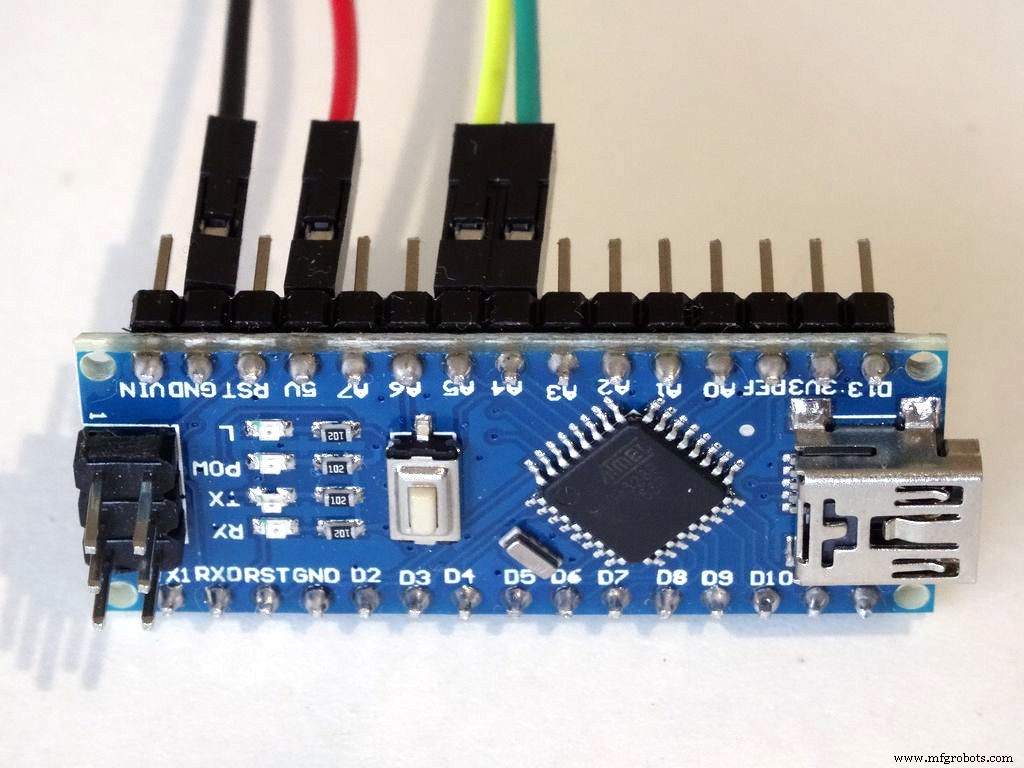
- Connectez l'autre extrémité du fil SDA (Fil vert ) à SDA/Broche analogique 4 de l'Arduino Nano tableau (Image 3 )
- Connectez l'autre extrémité du fil SCL (Fil jaune ) à SCL/Broche analogique 5 de l'Arduino Nano tableau (Image 3 )
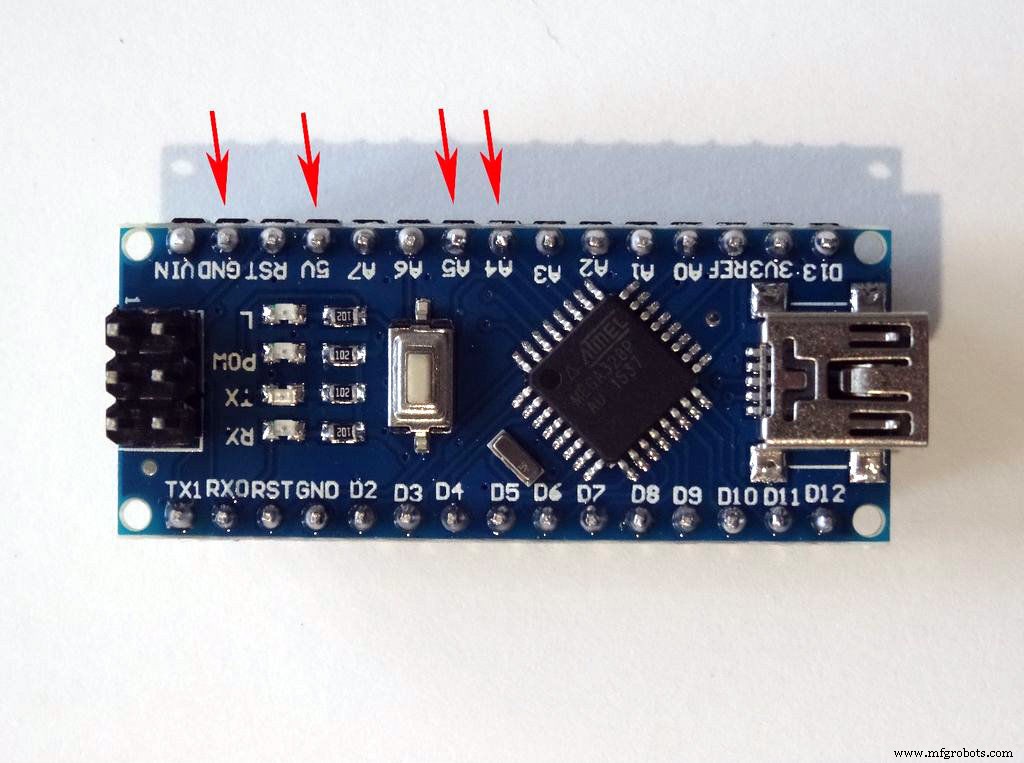
- Image 4 montre où sont les Terre , 5V Alimentation, SDA/Broche analogique 4 , et SCL/Broche analogique 5 , les broches de l'Arduino Nano
Étape 3 :démarrez Visuino et sélectionnez le type de carte Arduino
Pour commencer à programmer l'Arduino, vous aurez besoin de l'Arduino IDE installé à partir d'ici :http://www.arduino.cc/.
Assurez-vous d'installer la version 1.6.7 ou supérieure, sinon ce tutoriel ne fonctionnera pas !
Le Visuino :https://www.visuino.com doit également être installé.
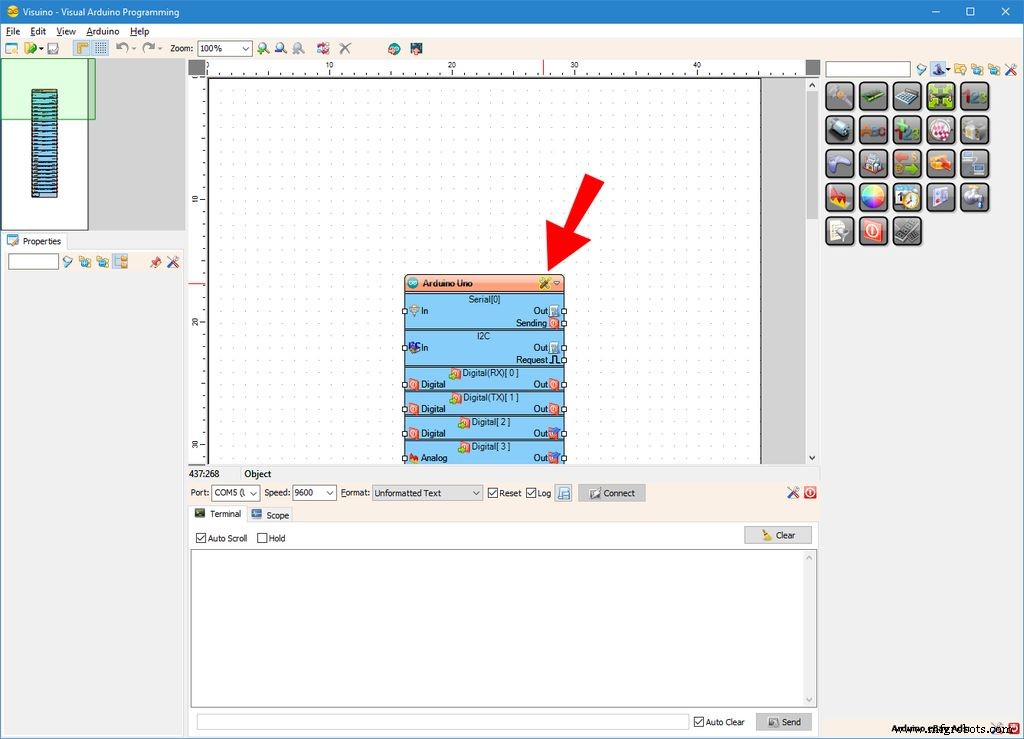
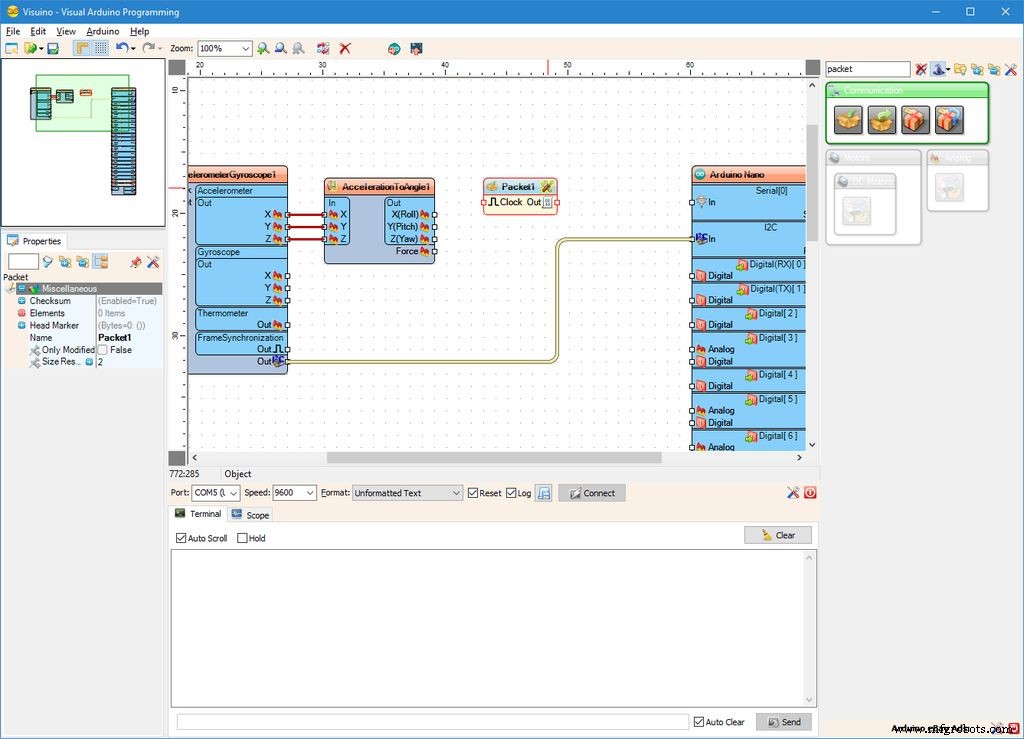
- Démarrer Visuino comme le montre la première image
- Cliquez sur "Outils " sur l'Arduino composant (Image 1 ) dans Visuino
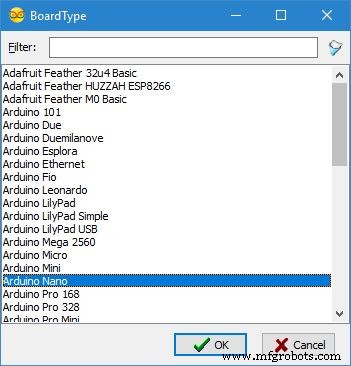
- Lorsque la boîte de dialogue apparaît, sélectionnez Arduino Nano comme le montre l'Image 2
Étape 4 :Dans Visuino :ajoutez et connectez le MPU9650 et l'accélération aux composants d'angle
Nous devons d'abord ajouter des composants pour contrôler le capteur MPU6050 et convertir l'accélération X, Y, Z en angle 3D X, Y, Z :
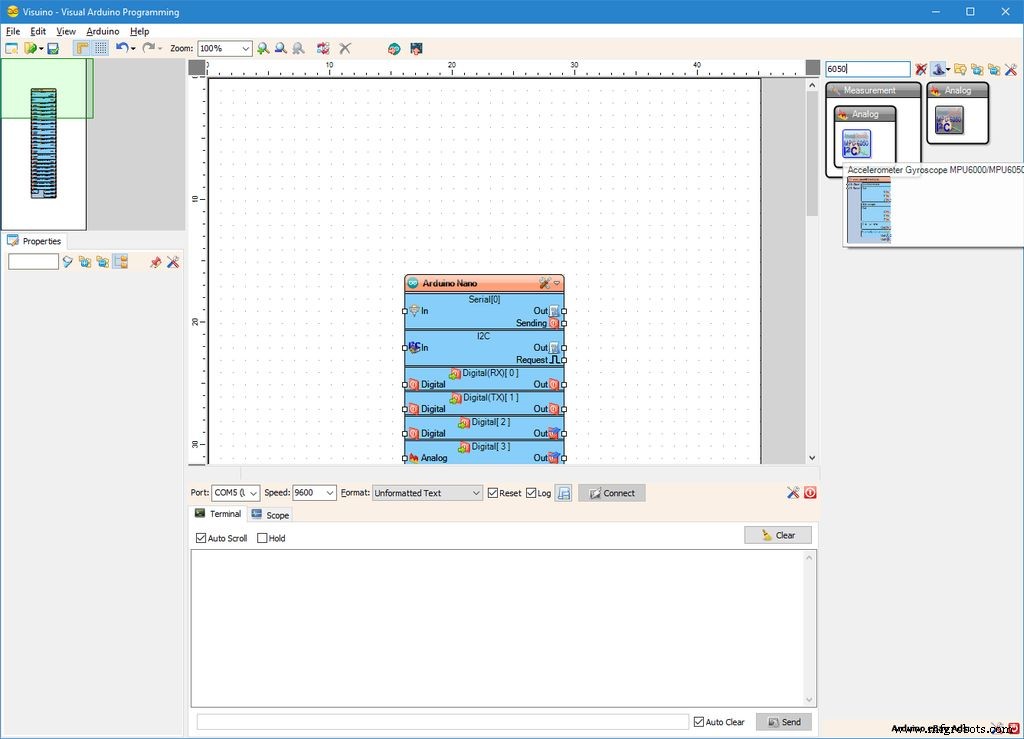
- Tapez "6050 " dans la zone Filtre de la boîte à outils des composants puis sélectionnez le "Gyroscope accéléromètre MPU6000/MPU6050 I2C composant " (Image 1 ), et déposez-le dans la zone de conception (Image 2 )
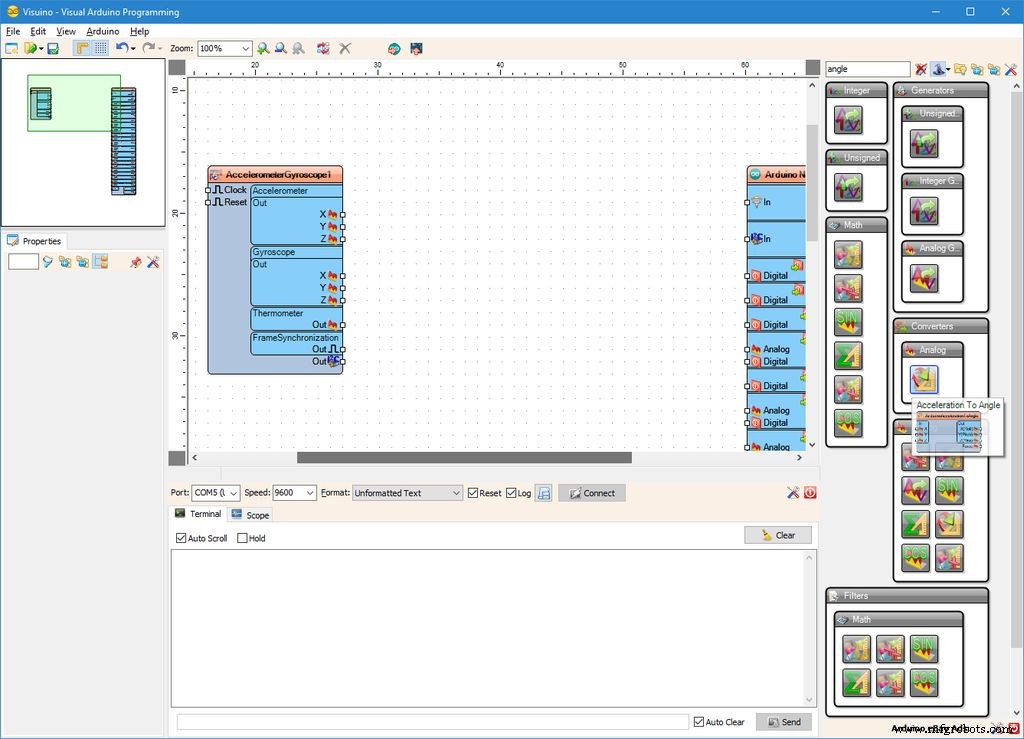
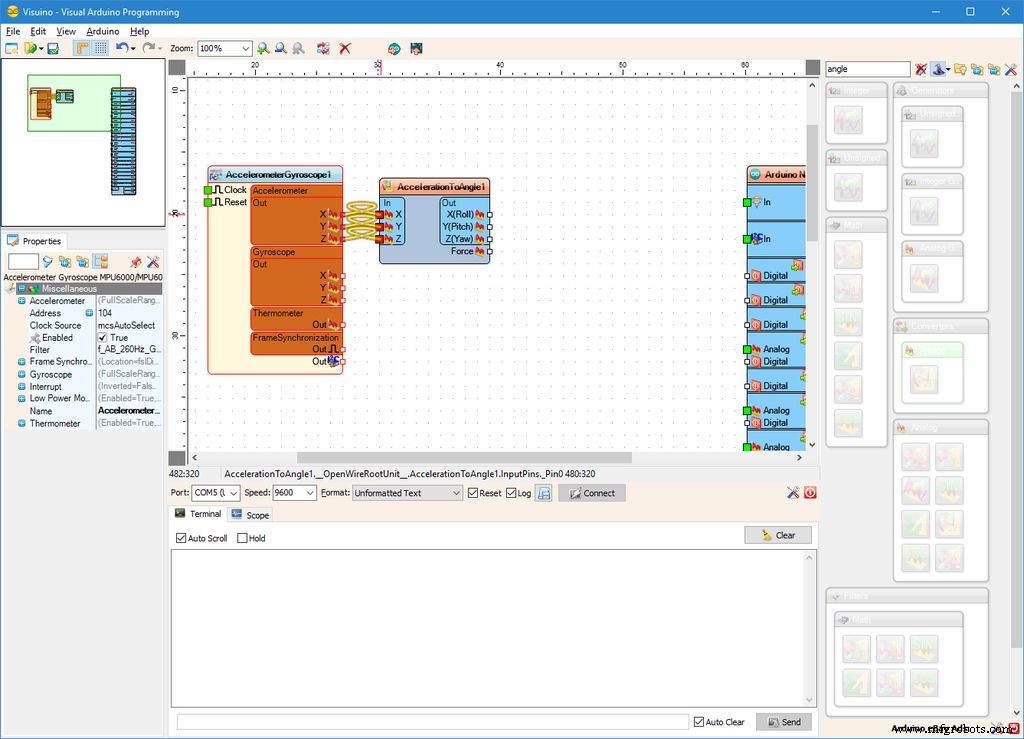
- Tapez "angle " dans la zone Filtre de la boîte à outils des composants, puis sélectionnez "Accélération à l'angle composant " (Image 2 ), et déposez-le dans la zone de conception (Image 3 )
- Cliquez sur "Sortie " boîte de l'"Accéléromètre " boîte contenant les broches d'accélération X, Y, X du AccelerometerGyroscope1 composant pour commencer à connecter toutes les broches de sortie à la fois (Image 3 )
- Déplacez la souris sur le "X " broche d'entrée du "In " boîte de l'AccélérationVersAngle1 composant. Le Visuino répartira automatiquement les fils afin qu'ils se connectent correctement au reste des broches (Image 3 )
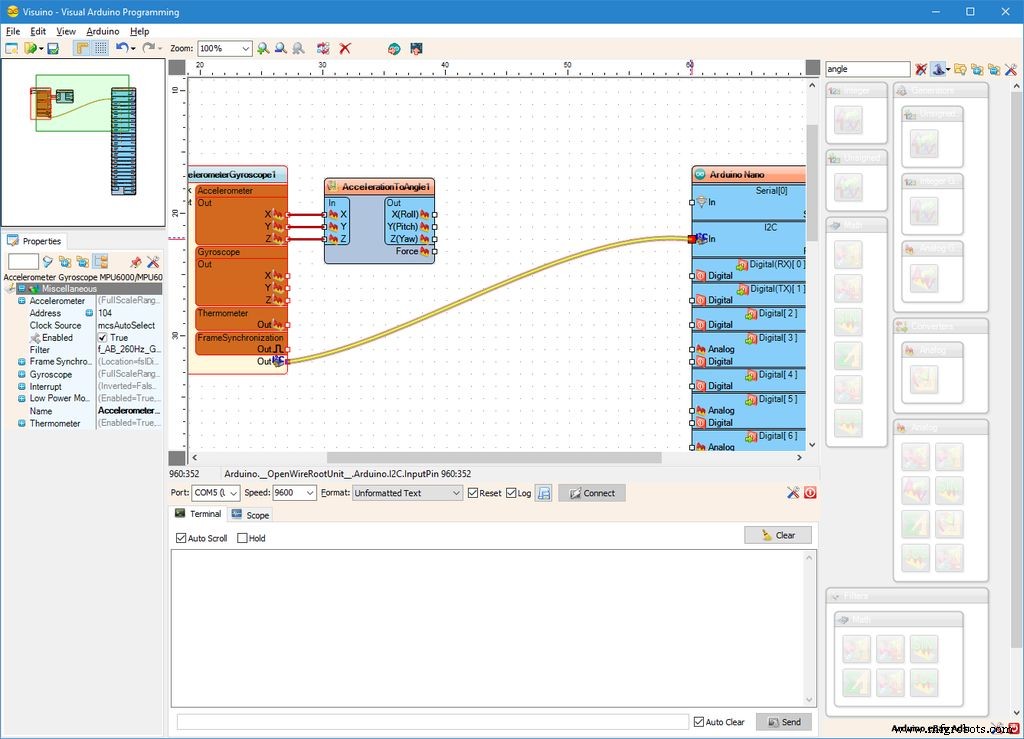
- Connectez le "Sortie " broche de l'AccéléromètreGyroscope1 composant au vers le "In " broche du I2C canal de l'Arduino composant (Image 4 )
Étape 5 :Dans Visuino :ajoutez un composant de paquet et 3 éléments analogiques binaires et connectez-les
Pour envoyer toutes les données des canaux sur le port série depuis Arduino, nous pouvons utiliser le composant Packet pour regrouper les canaux et les afficher dans la portée et les jauges dans Visuino :
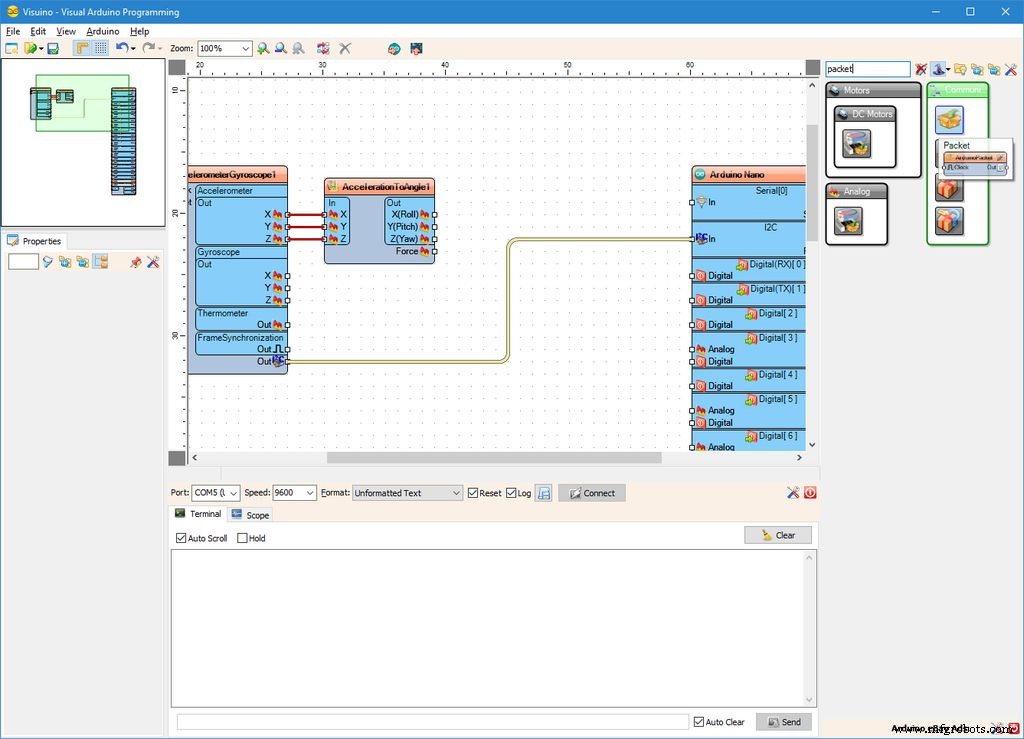
- Tapez "paquet " dans la zone Filtre de la boîte à outils des composants puis sélectionnez le composant " Générateur analogique sinusoïdal " (Image 1 ), et déposez-le dans la zone de conception
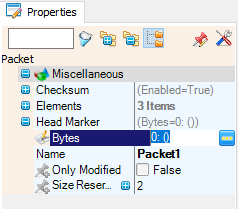
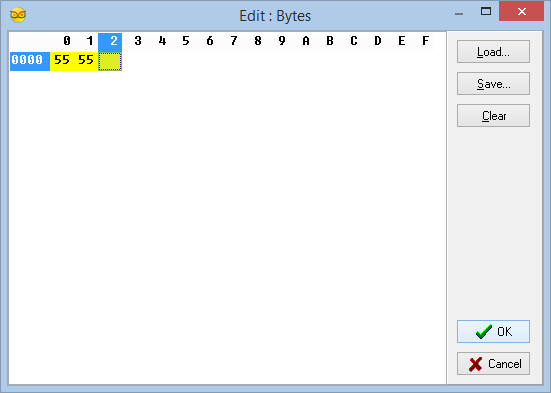
- Dans l'inspecteur d'objets, développez le "Marqueur de tête "propriété (Image 2 )
- Dans l'inspecteur d'objets, cliquez sur "... bouton " (Image 2 )
- Dans l'éditeur d'octets, saisissez des nombres, par exemple 55 55 (Image 3 )
- Cliquez sur le bouton OK pour confirmer et fermer l'éditeur
Étape 6 :Dans Visuino :ajoutez 3 éléments analogiques binaires au composant de paquet et connectez-les
Pour envoyer toutes les données des canaux sur le port série depuis Arduino, nous pouvons utiliser le composant Packet pour regrouper les canaux et les afficher dans la portée et les jauges dans Visuino :
- Cliquez sur "Outils bouton " du Packet1 composant (Image 1 )
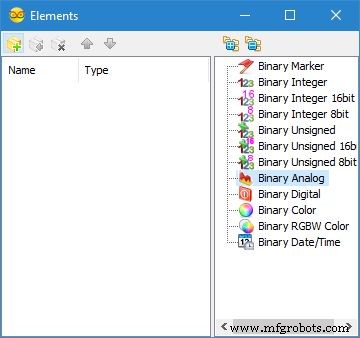
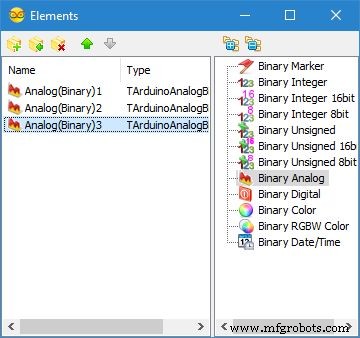
- Dans les "Éléments " éditeur sélectionnez le "Binary Analog ", puis cliquez sur le bouton "" 3 fois (Image 2 ) pour ajouter 3 Éléments analogiques (Image 3 )
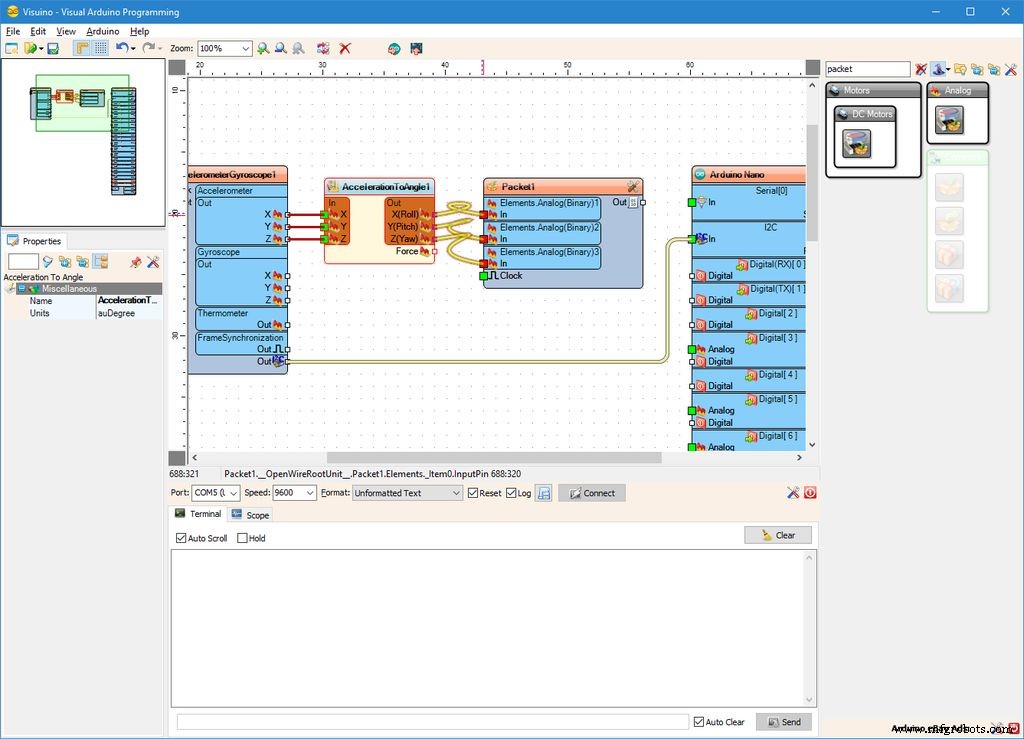
- Cliquez sur "Sortie " boîte de l'"Accéléromètre " Boite contenant les pins de l'AccelerationToAngle1 composant pour commencer à connecter toutes les broches de sortie à la fois (Image 4 )
- Déplacez la souris sur le "Dans " broche du "Elements.Analog(Binary)1 " élément du Packet1 composant. Le Visuino va automatiquement étendre les fils afin qu'ils se connectent correctement au reste des broches (Image 4 )
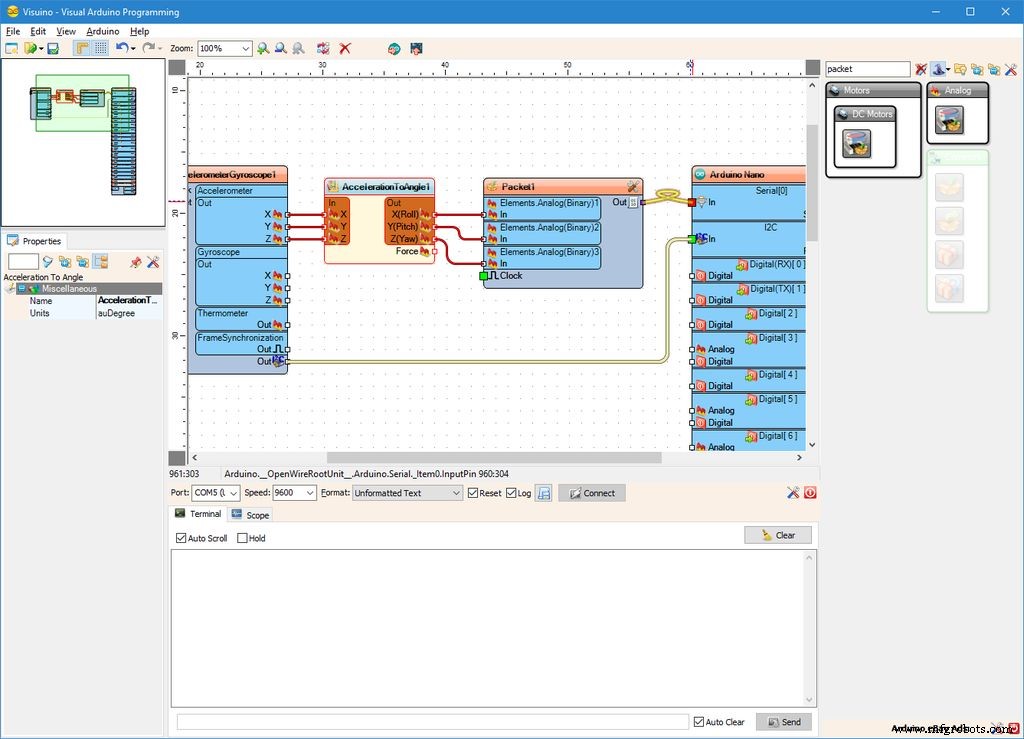
- Connectez le "Sortie " broche de sortie du Packet1 composant au "In " broche d'entrée du "Série[ 0 ] " canal du "Arduino "composant (Image 5 )
Étape 6 : générez, compilez et téléchargez le code Arduino


- En Visuino , Appuyez sur F9 ou cliquez sur le bouton affiché sur Image 1 pour générer le code Arduino et ouvrir l'IDE Arduino
- Dans l'IDE Arduino , cliquez sur Télécharger bouton, pour compiler et télécharger le code (Image 2 )
Étape 7 :Et jouez...
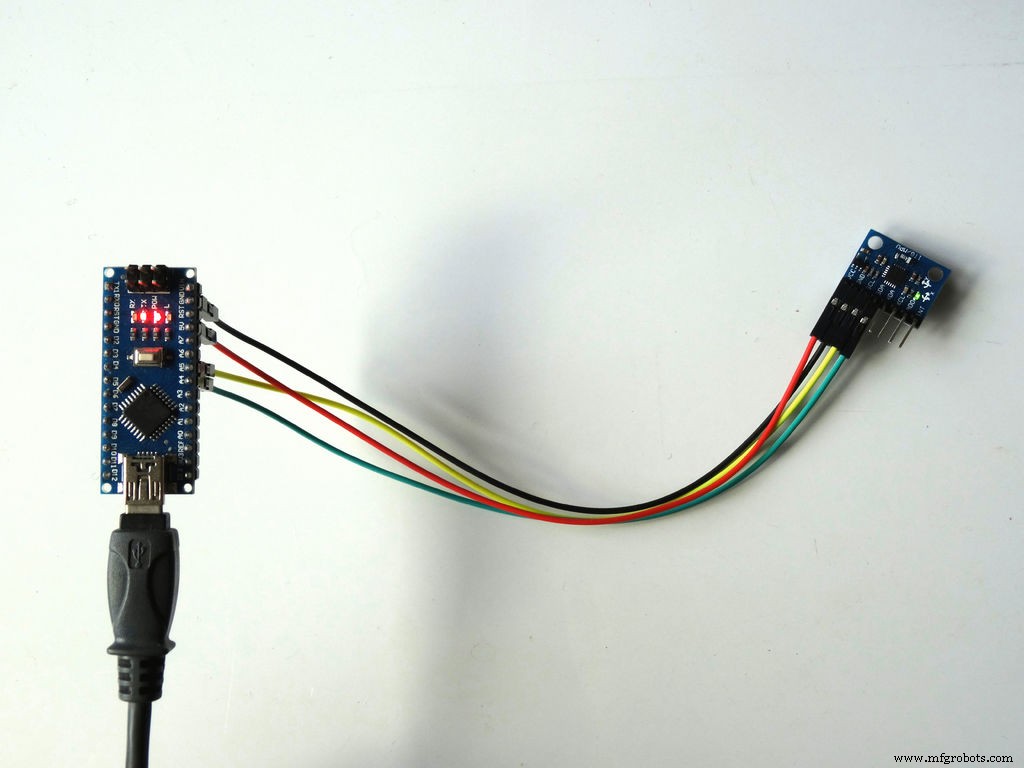
Vous pouvez voir l'accéléromètre MPU6050 et le capteur gyroscopique connectés et en fonctionnement sur Image 1 .
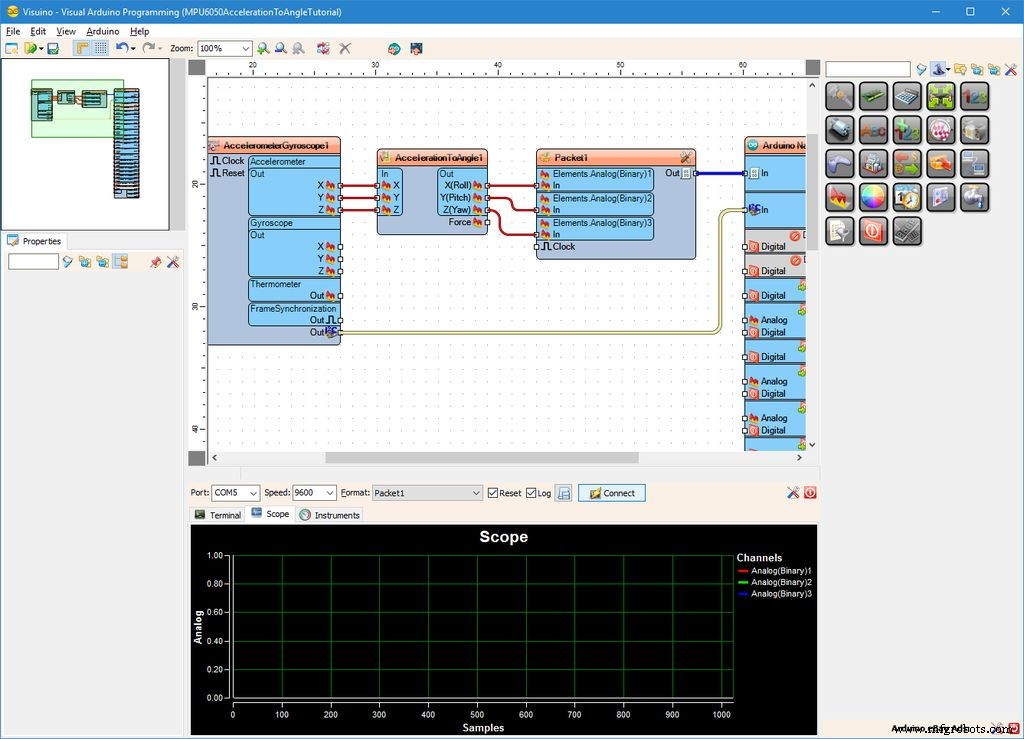
- En Visuino sélectionnez le port série, puis cliquez sur "Format : " et sélectionnez Packet1 (Image 2 )
- Cliquez sur le "Connecter bouton " (Image 2 )
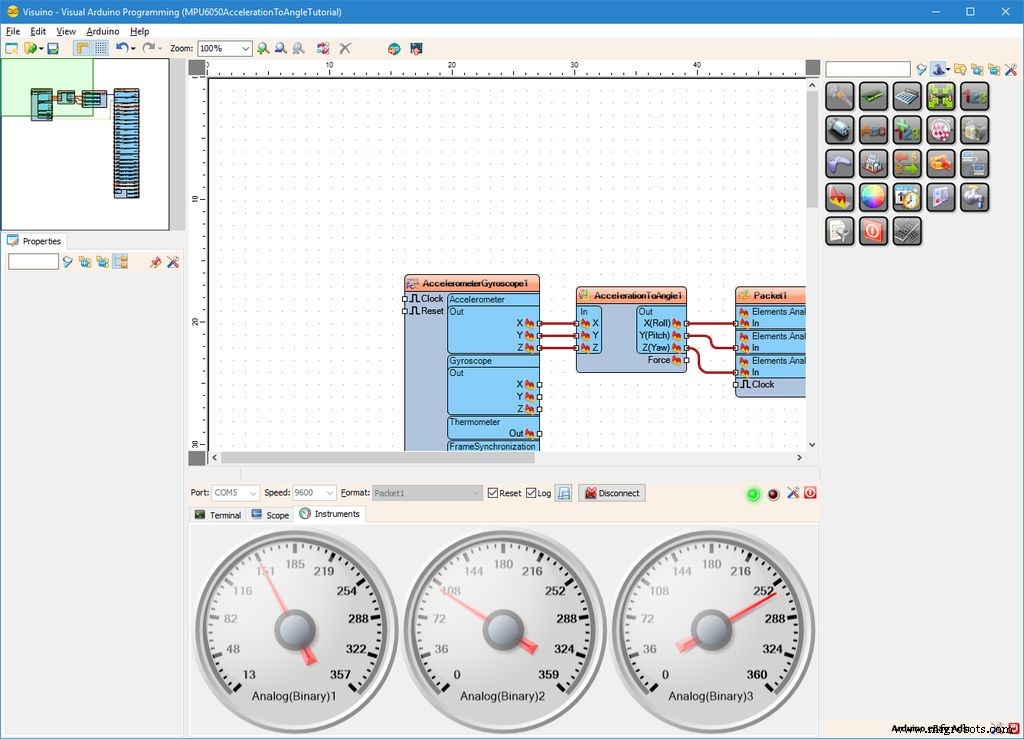
- Si vous sélectionnez le "Portée ", vous verrez la portée tracer les Angles X, Y, Z au fil du temps (Image 3 )
- Si vous sélectionnez les "Instruments ", vous verrez les Jauges montrant les mêmes informations (Image 4 )
Vous pouvez voir le capteur en action sur la Vidéo .
Félicitations ! Vous avez créé un Visuino projet de conversion de l'accélération en angle de l'Accéléromètre MPU6050 et capteur gyroscopique .
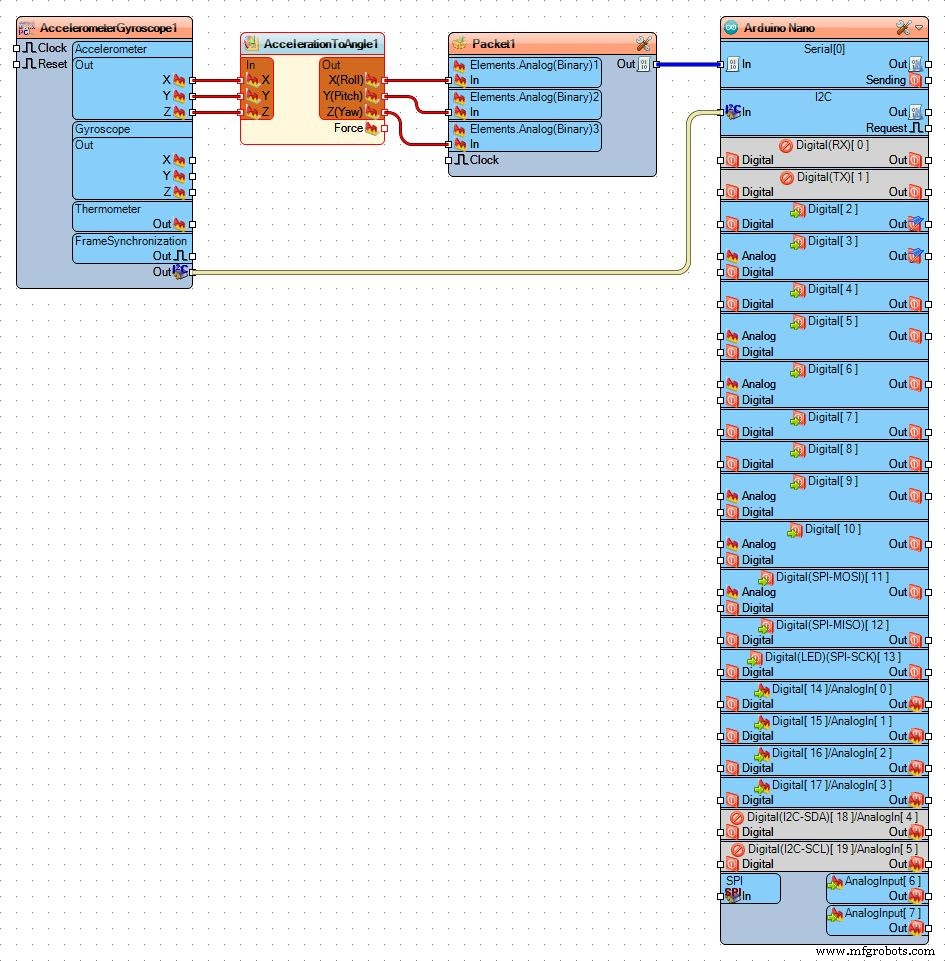
Sur Image 5 vous pouvez voir le Visuino complet schéma.
Le Visuino est également joint projet, que j'ai créé pour ce tutoriel. Vous pouvez le télécharger et l'ouvrir dans Visuino :https://www.visuino.com
Code
- Tutoriel MPU6050AccelerationToAngle
Tutoriel MPU6050AccelerationToAngleArduino
Projet Visuino completAucun aperçu (téléchargement uniquement).
Processus de fabrication
- Fonctionnement et applications du capteur d'accéléromètre
- Optimisation de la détection d'inclinaison/d'angle de haute précision :principes fondamentaux de l'accéléromètre
- Enregistreur de température Raspberry Pi
- Capteur de pression barométrique numérique BMP180 I2C
- Envoyer des données de capteur d'un Arduino à un autre à l'aide de Firebase
- Surveillance du CO2 avec le capteur K30
- Comment mesurez-vous ?
- Capteur d'empreintes digitales capacitif avec un Arduino ou ESP8266
- Tour de capteur cloud Arduino