


sondeur Arduino
Composants et fournitures
 |
| × | 1 | |||
 |
| × | 1 |
À propos de ce projet
Visualisation de l'écran radar pour HC-SR04
Code Arduino :
Envoie les lectures du capteur pour chaque degré déplacé par les valeurs d'asservissement envoyées au port série pour être récupérées par le traitement
https://github.com/faweiz/My-Arduino/blob/master/arduino_radar/Arduino_radar_HC_SR04/Arduino/Arduino_radar_server_arduino/Arduino_radar_server_arduino.ino
Code de traitement :
Cartographie une zone de ce que le HC-SR04 voit depuis une vue de haut en bas. Prend et affiche 2 lectures, une de gauche à droite et une de droite à gauche. Affiche une moyenne des 2 lectures
https://github.com/faweiz/My-Arduino/blob/master/arduino_radar/Arduino_radar_HC_SR04/Processing-code/Arduino_radar_client_processing/Arduino_radar_client_processing.pde
Toutes les questions sont les bienvenues !
Github :https://github.com/faweiz
Portefeuille :https://portfolium.com/faweiz
Linkedin :https://www.linkedin.com/in/faweiz
Code
- Fichier sans titre
Fichier sans titreArduino
/*https://www.hackster.io/faweiz/arduino-radarRadar Visualisation de l'écran pour HC-SR04Envoie les lectures du capteur pour chaque degré déplacé par les servovaleurs envoyées au port série pour être récupérées par le traitement*/#include#include #define TRIGGER_PIN 2 // La broche Arduino 2 liée à la broche de déclenchement sur le capteur à ultrasons.#define ECHO_PIN 3 // La broche Arduino 3 liée à la broche d'écho sur le capteur à ultrasons.#define MAX_DISTANCE 150 // Distance maximale pour laquelle nous voulons envoyer un ping (en centimètres). La distance maximale du capteur est évaluée à 400-500 cm.#define SERVO_PWM_PIN 9 //réglez le servo sur la broche 9 d'Arduino // signifie -angle .. angle#define ANGLE_BOUNDS 80#define ANGLE_STEP 1 int angle =0; // direction du mouvement du servo // -1 =back, 1 =forward int dir =1; Servo myservo;NewPing sonar (TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE); void setup() { Serial.begin(9600); // initialise le port série :myservo.attach(SERVO_PWM_PIN); // régler le servo sur la broche 9 d'Arduino} void loop() { delay(50); // nous devons renormaliser à des valeurs positives, car l'angle est de -ANGLE_BOUNDS .. ANGLE_BOUNDS // et la valeur du servo doit être positive myservo.write(angle + ANGLE_BOUNDS); // lire la distance du capteur et envoyer à la série getDistanceAndSend2Serial(angle); // calcule l'angle if (angle>=ANGLE_BOUNDS || angle <=-ANGLE_BOUNDS) { dir =-dir; } angle +=(dir * ANGLE_STEP); } int getDistanceAndSend2Serial(int angle) { int cm =sonar.ping_cm(); Serial.print(angle, DEC); Serial.print(","); Serial.println(cm, DEC); }
Coder
https://github.com/faweiz/My-Arduino/tree/master/arduino_radarArduino_radar_server_arduino.ino
Arduino_radar_client_processing.pde
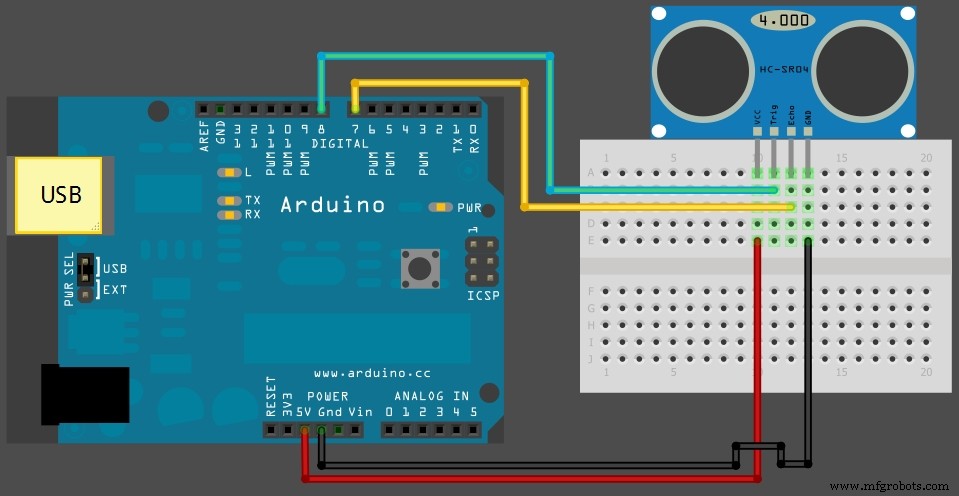
Schémas
Processus de fabrication