


Comment mesurez-vous ?
Composants et fournitures
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 |
À propos de ce projet
Suivez la croissance de votre enfant avec un stadiomètre numérique !
Durant mon enfance, ma mère avait l'habitude de prendre périodiquement ma taille et de l'écrire sur un bloc notes pour suivre ma croissance. Bien sûr, n'ayant pas de stadiomètre à la maison, j'étais debout contre le mur ou le montant de la porte pendant qu'elle prenait la mesure avec un ruban. Maintenant, j'ai une petite-fille nouveau-née et quand elle commencera à marcher, ses parents seront certainement intéressés à suivre sa croissance en taille. Ainsi, l'idée d'un stadiomètre numérique est née.
Il est réalisé autour d'un Arduino Nano et d'un "Time of Flight " qui mesure combien de temps la minuscule lumière laser prend pour rebondir vers le capteur.
Étape 1 : pièces et composants
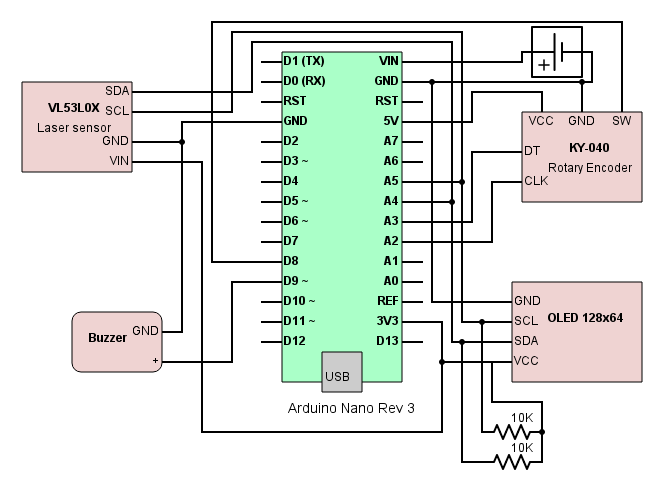
- Arduino Nano Rev 3
- Capteur laser CJMCU 530 (VL53L0x)
- Encodeur rotatif KY-040
- Écran SSD1306 OLED 128x64
- Buzzer passif
- Résistances 2x10KΩ
Étape 2 :Le capteur
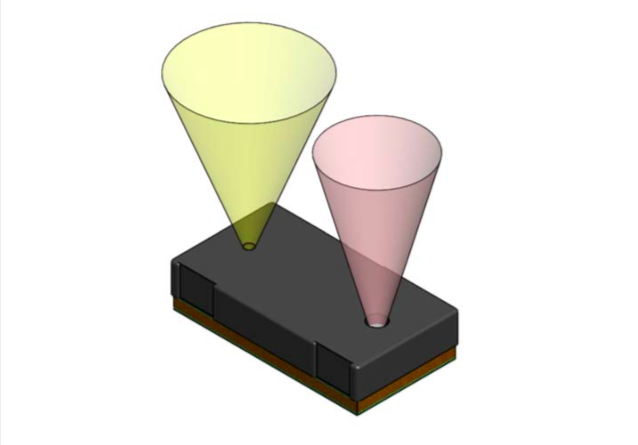
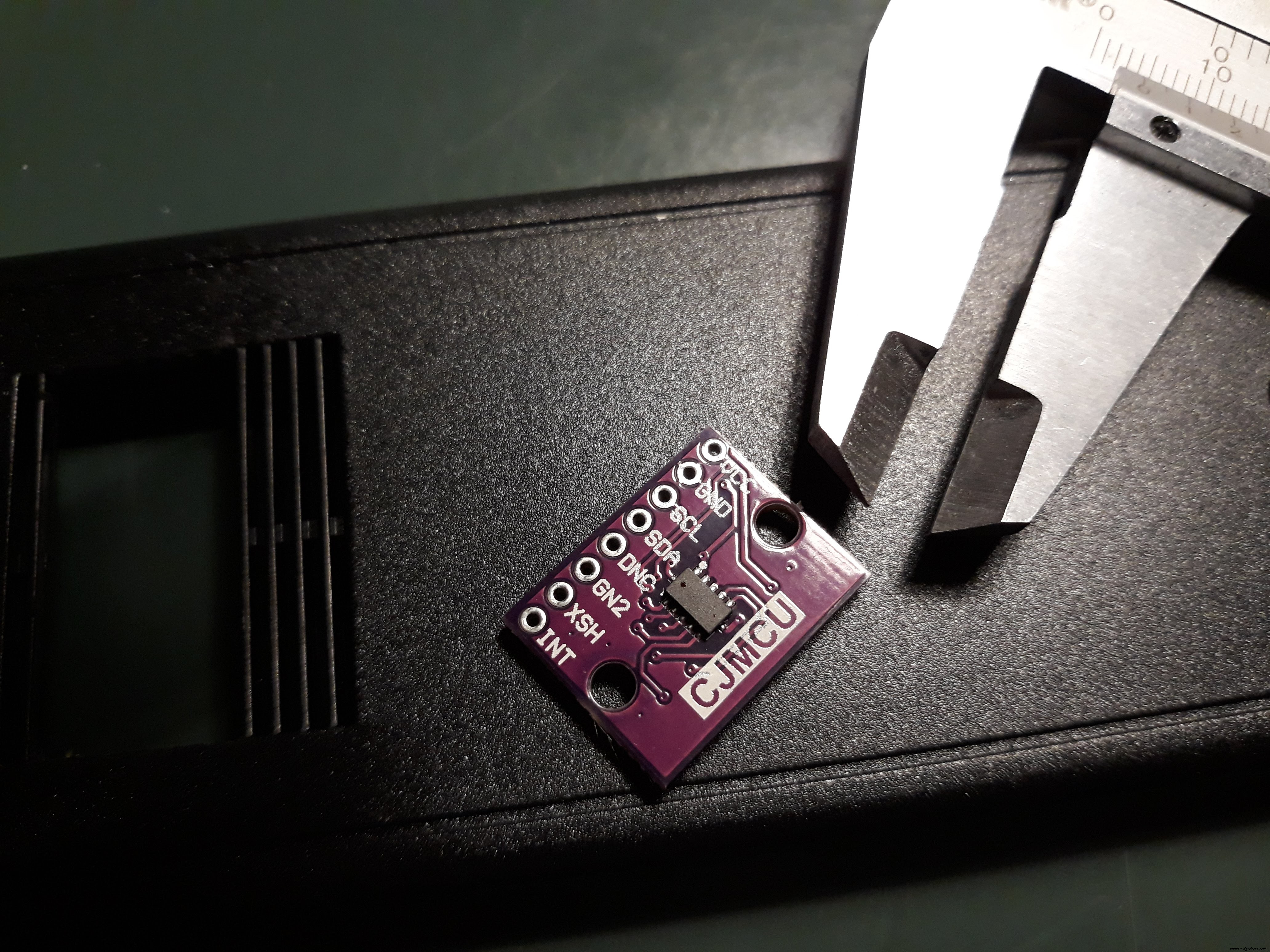
Le ST Microelectronics VL53L0X est un module de télémétrie laser à temps de vol (ToF) de nouvelle génération logé dans un boîtier minuscule, offrant une mesure de distance précise quelles que soient les réflectances cibles contrairement aux technologies conventionnelles.
Il peut mesurer des distances absolues jusqu'à 2 m. Le laser interne est totalement invisible à l'œil humain (longueur d'onde 940 nm) et répond aux dernières normes en matière de sécurité. Il intègre une gamme de SPAD (Single Photon Avalanche Diodes)
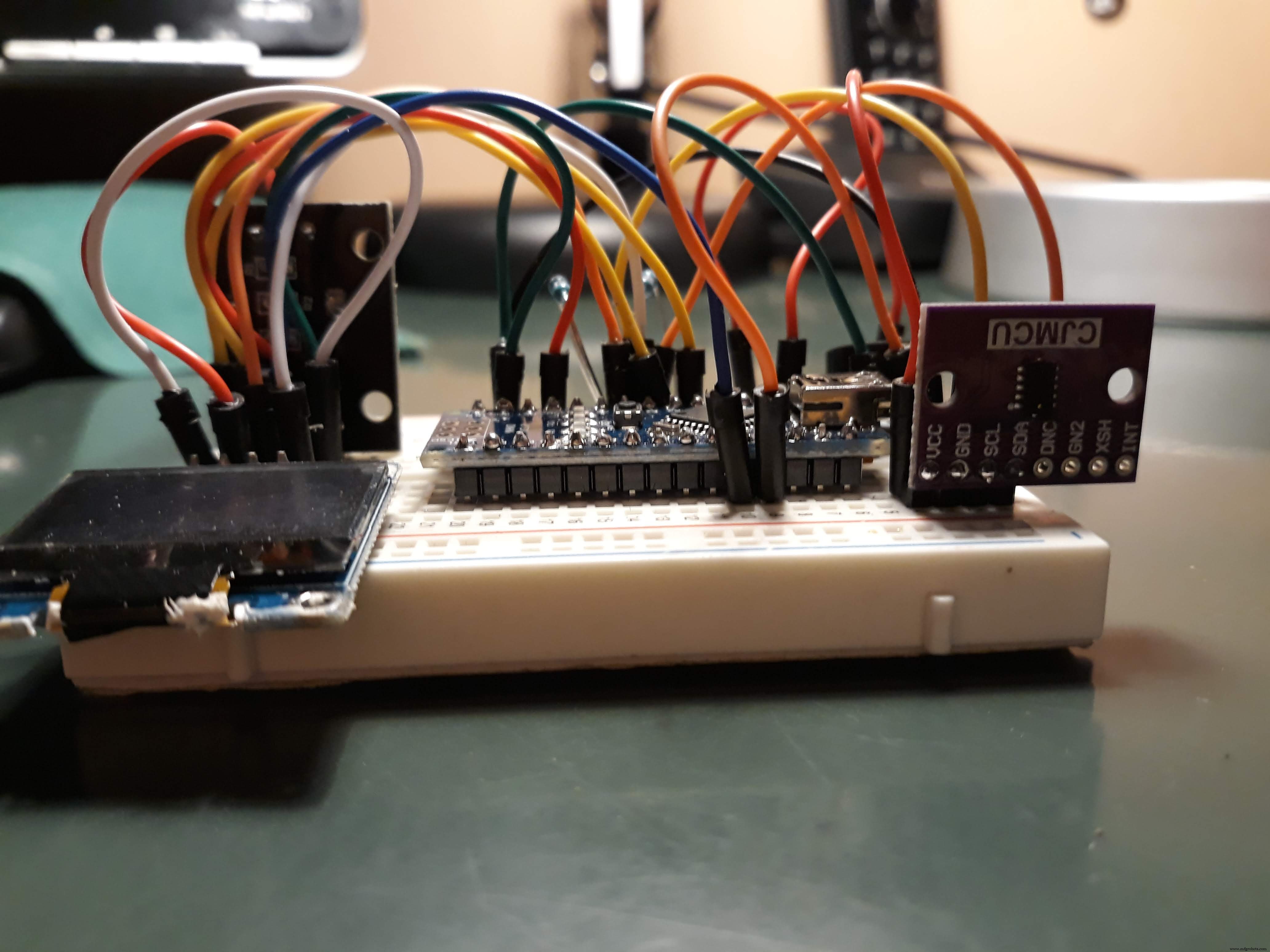
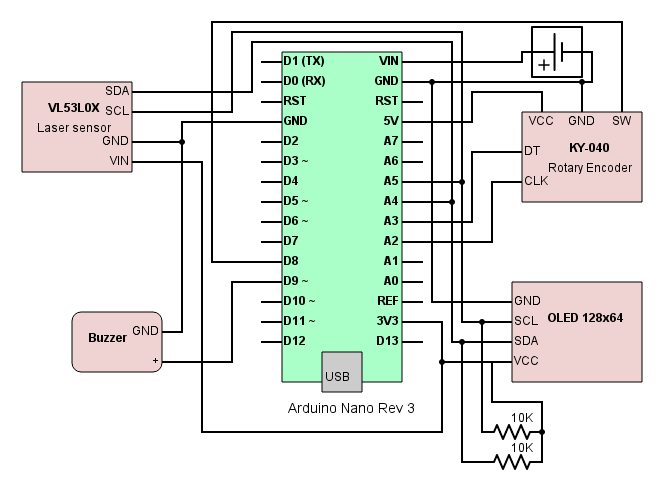
La communication avec le capteur se fait via I2C. Comme le projet comprend également un autre I2C installé (l'OLED), 2 résistances pullup de 10KΩ sont nécessaires sur les lignes SCL et SDA.
J'ai utilisé le CJMCU-530, qui est un module de dérivation avec le VL53L0X de ST Microelectronics.
Étape 3 : Opérations et positionnement du capteur
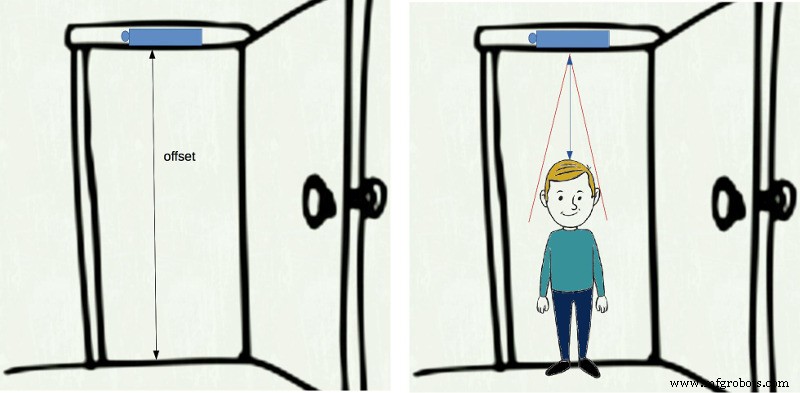
Une fois construit et testé, l'appareil doit être monté au centre du haut d'un cadre de porte ; en effet, si vous le montez trop près d'un mur ou d'un obstacle, le faisceau laser IR sera interféré et créera un phénomène de diaphonie sur la mesure. Une autre option serait d'installer l'appareil via une tige d'extension pour l'éloigner du mur, mais c'est plus gênant.
Prendre soigneusement la bonne mesure de longueur entre le sol et le capteur (décalage à régler) et calibrer l'appareil (voir étape suivante). Une fois calibré, l'appareil peut être utilisé sans avoir à recalibrer, à moins que vous ne le déplaciez dans une autre position.
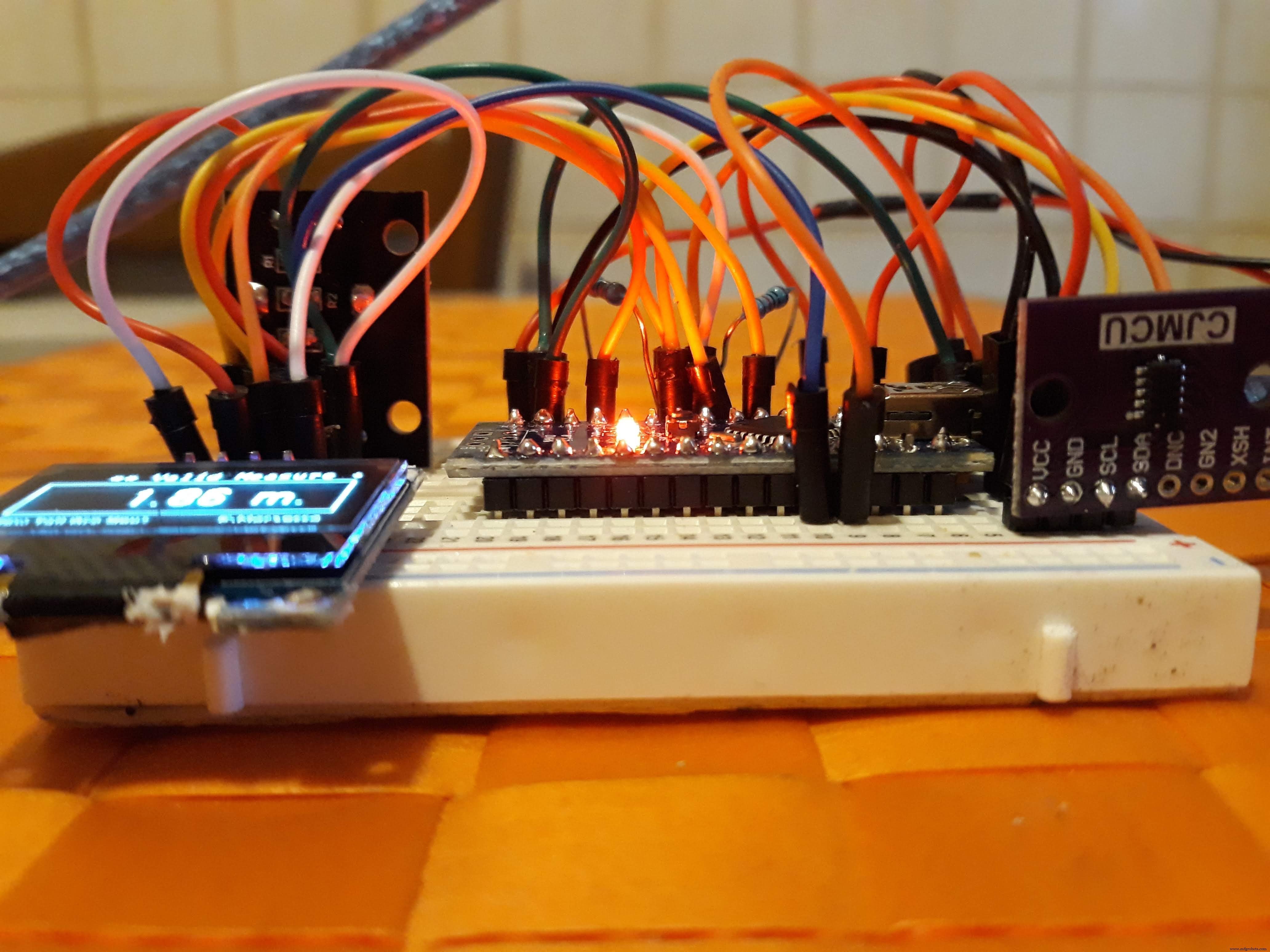
Allumez l'appareil et placez-vous en dessous, dans une position droite et ferme. La mesure sera prise lorsque l'appareil détecte une longueur stable pendant plus de 2,5 secondes. À ce stade, il émettra un son de musique de « succès » et maintiendra la mesure sur l'écran.
Étape 4 :Étalonnage de l'offset
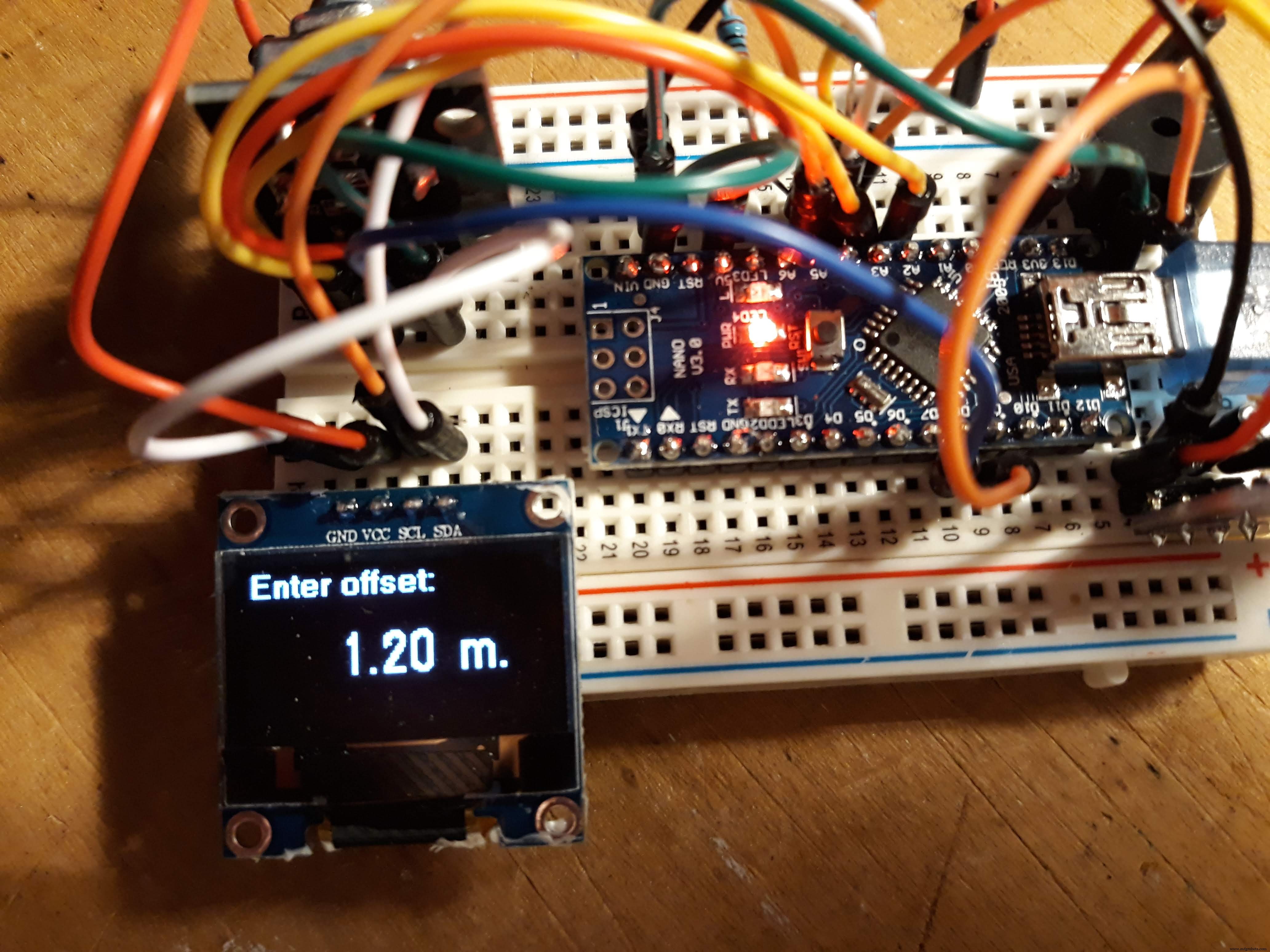
Comme mentionné précédemment, vous devez définir la valeur correcte (en centimètres) pour le décalage, la distance entre l'appareil de mesure et le sol. Ceci peut être réalisé en appuyant sur le bouton de l'encodeur rotatif (qui a un interrupteur à bouton-poussoir). Une fois le mode calibrage activé, réglez la bonne distance en tournant le bouton (dans le sens des aiguilles d'une montre ajoute des centimètres, dans le sens inverse soustrait). Plages de décalage de 0 à 2,55 m.
Une fois terminé, appuyez à nouveau sur le bouton. Deux tonalités différentes seront générées par le buzzer interne pour vous donner un retour acoustique. Le mode calibration a un timeout de 1 minute :si vous ne réglez pas l'offset dans ce délai, l'appareil sort du mode calibration et retombe en mode mesure, sans modifier l'offset mémorisé. Le décalage est stocké dans la mémoire EEPROM d'Arduino, pour le conserver pendant les arrêts ultérieurs.
Étape 5 :Coder
ST Microelectronics a publié une bibliothèque API complète pour le VL53L0X, y compris la détection de gestes. Pour les besoins de mon appareil, j'ai trouvé plus facile d'utiliser la bibliothèque VL53L0X de Pololu pour Arduino. Cette bibliothèque est destinée à fournir un moyen plus rapide et plus facile de commencer à utiliser le VL53L0X avec un contrôleur compatible Arduino, contrairement à la personnalisation et à la compilation de l'API de ST pour l'Arduino.
J'ai réglé le capteur en mode HAUTE PRÉCISION et LONGUE PORTÉE, afin d'avoir plus de liberté sur la hauteur d'installation et le réglage du décalage. Cela se traduira par une vitesse de détection plus lente, ce qui est de toute façon suffisant pour les besoins de cet appareil.
Le décalage est stocké dans la mémoire EEPROM d'Arduino, dont les valeurs sont conservées lorsque la carte est éteinte.
Dans la section boucle, la nouvelle mesure est comparée à la précédente et si 2,5 secondes sont écoulées sur la même mesure (et s'il ne s'agit PAS d'une valeur Offrange ou Timeout), la mesure est soustraite de l'offset et affichée en permanence à l'écran . Une courte musique « réussie » est jouée par le buzzer piézo, pour avertir l'utilisateur de manière auditive.
HTAY.ino
Étape 6 : Schémas
Étape 7 : boîtier/boîtier et assemblage

Comme mon incapacité à découper des fenêtres rectangulaires sur des boîtes commerciales est très connue, j'ai pris le chemin de la conception d'un boîtier avec une CAO et de l'envoyer en impression 3D. Ce n'est pas le choix le moins cher, mais c'est quand même une solution pratique car il offre la possibilité d'être très précis et flexible sur le positionnement de tous les composants.
La petite puce laser est montée sans verre de protection, afin d'éviter la diaphonie et les mesures erratiques. Si vous souhaitez installer le laser derrière un capot, vous devrez entreprendre une procédure d'étalonnage complexe comme indiqué dans la documentation de ST Microelectronics.
HTAY.stl
Code
- HTAY.ino
HTAY.inoArduino
Aucun aperçu (téléchargement uniquement).
Github
https://github.com/pololu/vl53l0x-arduinohttps://github.com/pololu/vl53l0x-arduinoPièces et boîtiers personnalisés
HTAY.stlSchémas
Processus de fabrication
- IIOT – Êtes-vous (vraiment) prêt ?
- IdO de base – RaspberryPI HDC2010 comment
- Comment mesurer la qualité de l'air sur OpenSensors
- Connectez un capteur à votre Raspberry Pi pour vous avertir de la présence de gaz nocifs !
- Comment vérifier et étalonner un capteur d'humidité
- Comment pirater des télécommandes infrarouges
- Surveillance du CO2 avec le capteur K30
- Problèmes de personnes :comment gérez-vous ?
- Est-il facile d'utiliser une thermistance ? !