


Servoradar
Composants et fournitures
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
À propos de ce projet
Comme nous le savons, pour détecter les satellites, les objets célestes, les signaux d'astéroïdes, etc. depuis l'espace, nous avons besoin d'un radar à de nombreuses fins. la nasa utilise de nombreux radars à des fins militaires et spatiales. En fait, mon projet est un radar qui affiche « objet détecté » sur le moniteur série lorsqu'un objet se trouve à 10 cm du radar. cela fonctionne en utilisant le principe des ondes ultrasonores qui se déplacent en rafales soniques, nous aurons donc besoin d'un capteur à ultrasons .

ensuite pour la programmation et pour l'exécution du code pour le faire fonctionner nous aurons besoin d'Arduino (n'importe quelle carte mais essayez d'utiliser UNO); selon moi, je pense qu'arduino est parfait pour le projet car il dispose d'un excellent type de stockage et d'affichage de données. Tout en entendant le mot afficher, nous devrons également utiliser le moniteur série. maintenant tourner le capteur pour étaler ses ondes et récupérer pour calculer la distance dont nous aurons besoin du servo. maintenant, pour la communication entre le matériel, nous aurons besoin de Cavaliers et planche à pain.
Voyons maintenant comment cela fonctionne le capteur à ultrasons envoie des ondes et qui crée une rafale ultrasonore de 8 cycles par minute puis le reçoit à l'aide des broches puis il donne les données à la carte qui calcule la distance puis les télécharge dans le moniteur série. le servo continue de tourner de 0 degrés à 180 degrés et l'arduino continue de calculer l'angle qu'il s'est déplacé et le télécharge sur le moniteur série. Lorsque le capteur à ultrasons détecte que la distance est inférieure à 10 cm, l'arduino apprend qu'il s'agit d'un objet et imprime « objet détecté » sur le moniteur série.
en utilisant ce fondamental, mon servoradar arduino fonctionne.

Si vous aimez mon radar, veuillez respecter mon projet et si le radar ne fonctionne pas correctement ou s'il y a une erreur que vous pensez, dites-le moi dans les commentaires et j'effacerai l'erreur.
Code
- code serveur
code serveurArduino
le diagramme peut différer un peu du code, veuillez donc essayer de suivre le code#includeServo myservo;int Ang =0;long duration;int distance;const int trigpin =8;const int echopin =11;void setup() { Serial.begin(9600); monservo.attach(3); pinMode(triggpin, OUTPUT); pinMode(echopin, INPUT);}void loop() { for (Ang =0; Ang <=180; Ang +=1) { myservo.write(Ang); retard (15); } pour (Ang =180; Ang>=0; Ang -=1) { monservo.write(Ang); retard (200); digitalWrite(triggin, LOW); délaiMicrosecondes(2) ; digitalWrite(triggin, HAUT); délaiMicrosecondes(15); digitalWrite(triggin, LOW); durée =pulseIn(échopin, HAUT); distance =durée * 0,034 / 2 ; Serial.println("Distance"); Serial.println(distance); Serial.println("Angle"); Serial.println(Ang); if (distance <=10) Serial.println("objet détecté"); }}
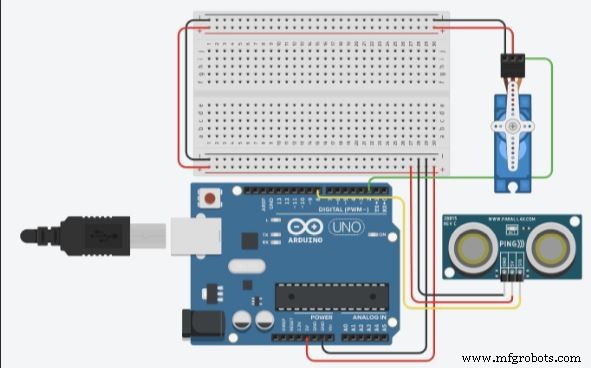
Schémas
connectez ce qui suitCapteur Arduino
VCC - 5V
déclencheur - 8
échopin - 11
terre - terre
servo Arduino
broche positive - 5V
broche négative - masse
broche - 3
veuillez suivre ce qui précède
Processus de fabrication
- Pourquoi avez-vous besoin d'une maintenance prédictive
- Pourquoi dois-je remplacer un niveleur de quai ?
- Le monde de la simulation en évolution rapide
- L'automatisation ne suffit pas - vous avez besoin d'hyperautomatisation
- Qu'est-ce qu'un portique ?
- Avez-vous besoin de nouveaux freins Storm ?
- De quel entretien les freins à tambour ont-ils besoin ?
- Besoin d'une fraiseuse CNC ?
- Besoin d'une machine VMC 5 axes ?