


Robot Raspberry Pi :Comment construire un robot Raspberry Pi
Pi Framboise
Trouvez-vous difficile et complexe de construire un robot Raspberry Pi ? Alors vous êtes au bon endroit.
En effet, utiliser une carte Pi pour votre robot vous donnerait un ordinateur complet à un prix abordable. Par conséquent, lorsque vous combinez cela avec son petit facteur de forme et son support communautaire étendu, ce sera une excellente planche, même pour les débutants.
Cependant, plonger dans le monde de la robotique signifie plonger dans des conceptions de circuits plus avancées. Mais ne vous inquiétez pas, nous allons le rendre aussi simple que possible. https://www.wellpcb.com/
Ainsi, dans cet article, nous verrons comment construire un robot Raspberry Pi et les différents projets de robot Pi que vous pouvez réaliser.
Comment construire un robot Raspberry Pi
Ici, nous allons vous montrer comment construire un robot Pi adapté aux débutants qui peut éviter les obstacles et naviguer librement. Voici les pièces dont vous avez besoin pour ce projet :
- Raspberry Pi (modèles B, B+ ou 2)
- Moteurs CC à engrenages (1)
- Roue pivotante (1)
- Carte SD (1)
- Souris (1)
- Bouton poussoir (1)
- Souris (1)
- Résistance 200R (1)
- Planche à pain (1)
- Ruban adhésif double face (1)
- Clavier
- Pilote L293D (1)
- Cavaliers mâle à mâle ou femelle à femelle (1)
- Châssis et roues du robot (1)
- Modules de capteurs infrarouges (1)
Construire le projet
Tout d'abord, nous devons connecter le capteur IR au Raspberry Pi. Donc, pour ce faire, mettez votre Raspberry Pi après l'avoir connecté à votre clavier, votre souris et votre moniteur. Ensuite, cliquez sur votre capteur et assurez-vous qu'il fonctionne correctement.
Ensuite, connectez la broche 5V et la broche GND du Pi au capteur pour l'alimentation. Ensuite, cliquez sur la broche B du capteur sur les broches GPIO 16 et 3. Enfin, vérifiez la configuration des broches du GPIO.BOARD.
Ensuite, saisissez le code suivant et enregistrez-le en tant que fichier Python, de préférence irtest.py.
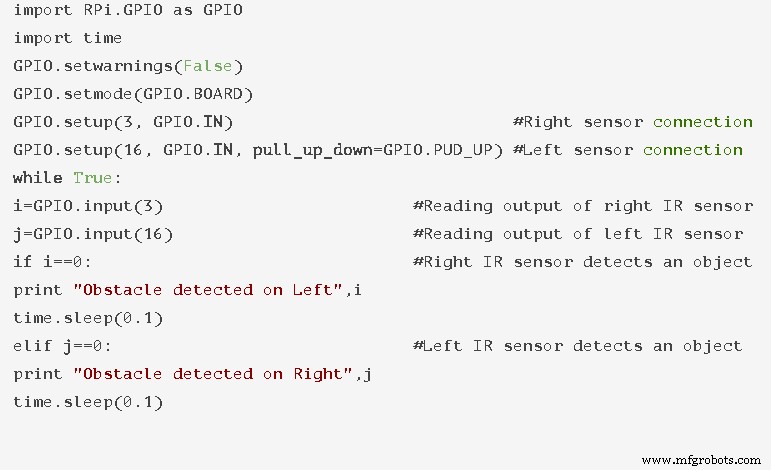
Code pour le fichier Python
Une fois que vous avez enregistré et exécuté le fichier python, vous remarquerez les impressions de sortie suivantes lorsque vous bloquez le capteur :
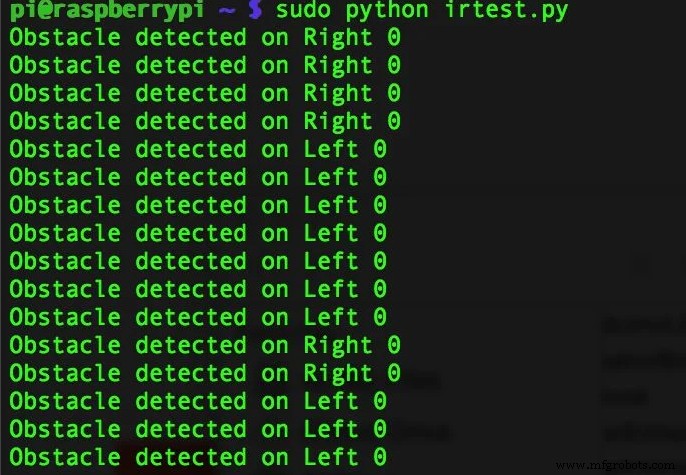
Impressions de sortie pour le fichier Python
Alors, essayez de vérifier vos connexions ou de remplacer vos composants si cela ne fonctionne pas.
Connectez vos moteurs avec le L293D
Maintenant, nous allons utiliser le module L293D pour connecter les moteurs. Mais, d'abord, alimentez le L293D via les broches + et -. Ensuite, connectez également ces broches d'alimentation à la carte de la pile 9v.
Connexion complète du circuit
De plus, connectez la broche - de L293D à la broche GND du Pi. Consultez le schéma ci-dessous pour obtenir une image claire des connexions.
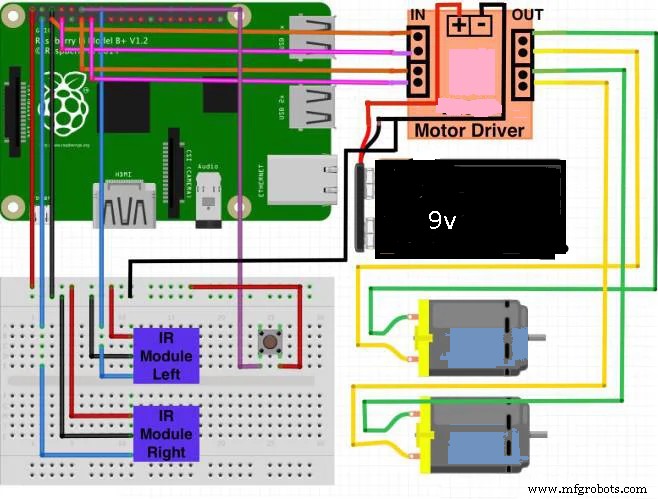
De plus, utilisez quatre broches GPIO de sortie pour créer des entrées pour la carte. De plus, vous pouvez utiliser ces broches de sortie pour contrôler le sens de rotation des deux moteurs.
De plus, vous pouvez connecter les deux bornes du moteur aux quatre bornes de sortie de la carte. Fixez enfin un bouton poussoir d'activation ou de désactivation de votre robot pour votre dernière connexion.
Construction finale
Vous pouvez maintenant ajouter des roues à vos moteurs et assembler vos connexions sur le châssis de votre robot. Assurez-vous de fixer les pièces avec votre ruban adhésif double face pour éviter de tomber.
N'oubliez pas de tester vos moteurs avec le code ci-dessous. Assurez-vous également d'enregistrer le code dans un fichier python :moto.py. Utilisez ensuite la commande sudo motor.py pour exécuter le code. Vos moteurs devraient commencer à tourner si cela fonctionne.
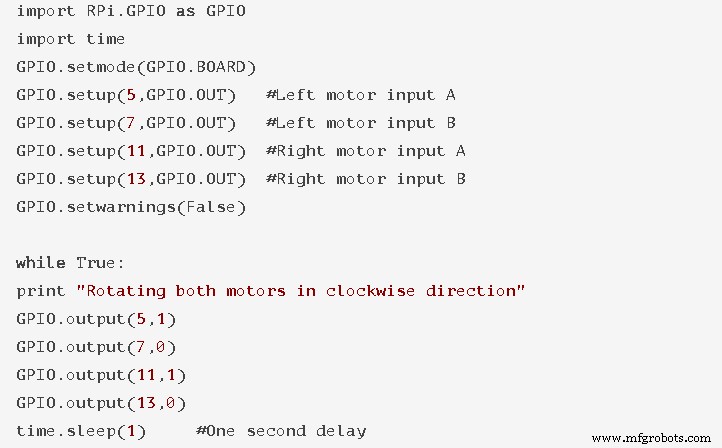
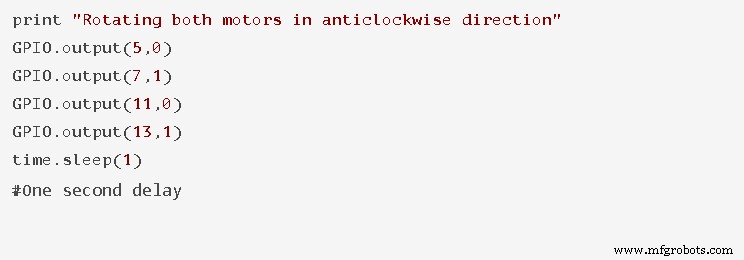
Code pour tester les moteurs
Comment ça marche
Lorsque vous appuyez sur le bouton poussoir, le robot s'active et commence à se déplacer. Tout en avançant, le robot recherchera tous les objets bloquant son chemin avec le capteur IR. Une fois qu'il détecte un obstacle, le Pi permet au robot de contourner l'obstacle. Encore une fois, vous pouvez désactiver le robot en appuyant sur le bouton.
Projets de robots Raspberry Pi
Donc, si vous avez terminé le projet facile ci-dessus et que vous recherchez plus de défis, voici quelques excellentes idées de projets à essayer.
1. Robot quadrupède CHOP

Robot quadrupède hacheur
En effet, le robot quadrupède chop est un projet DIY similaire au spot de Boston Dynamics. De plus, le projet CHOP est open-source. Par conséquent, vous pouvez le personnaliser et l'ajuster avec quelques pièces imprimées en 3D et d'autres matériaux.
Sans aucun doute, le Raspberry Pi 4B et un Arduino Mega sont les composants importants de ce robot. De plus, l'Arduino filtre les données des capteurs et se connecte aux servo-contrôleurs. D'autre part, le Pi collecte toutes les données et exécute divers scripts Python pour contrôler les mouvements du robot.
De plus, le Pi utilise un modèle cinématique inverse pour contrôler le mouvement des servos. Enfin, vous pouvez utiliser un contrôleur Bluetooth pour contrôler la direction du robot.
2. Robot de ping-pong
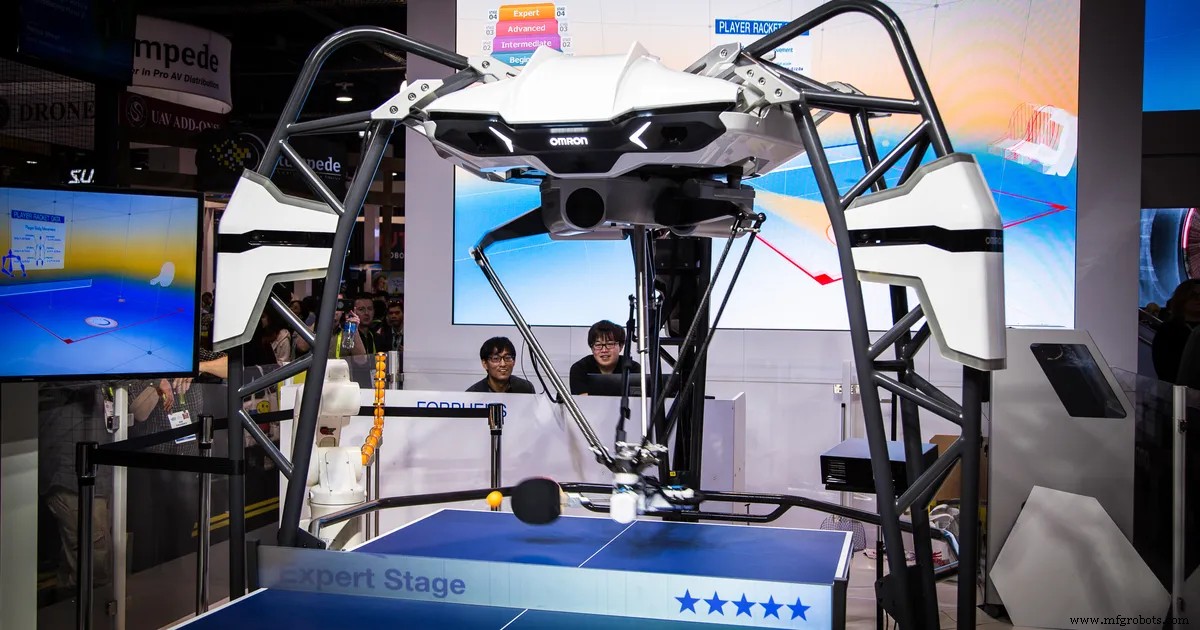
Robot de ping-pong
Le robot de ping-pong est capable de jouer au tennis de table avec des humains. Et à différents niveaux, du plus avancé au plus simple.
Vous utilisez le robot de ping-pong pour les jeux de loisir ou la pratique intensive. Cependant, vous pouvez acheter une version commerciale pour environ deux mille dollars. Ou créez sans effort une version DIY avec des pièces que vous avez déjà, des pièces imprimées en 3D et découpées au laser.
De plus, vous pouvez vous connecter au bot via WiFi et avoir un contrôle total.
3. Robot humanoïde Raspberry Pi

Robot humanoïde
Vous pouvez construire votre robot humanoïde à l'aide d'un Raspberry Pi. Certains robots humanoïdes ont des fonctions d'évitement d'obstacles, de détection de distance par ultrasons ou de contrôle sans fil.
Quelle que soit la fonctionnalité, vous aurez besoin d'un kit Robotics Bioloid, d'un gyroscope et d'un capteur de distance pour ce projet.
De plus, nous vous recommandons d'utiliser le plus petit Raspberry Pi Zero et une batterie monocellulaire de 2500 Mah pour l'alimentation.
De plus, vous aurez besoin d'une puce de conversion analogique-numérique pour pouvoir lire les données du capteur.
4. Pi Roomba

Roomba
Si vous avez de l'expérience en robotique, vous avez probablement entendu parler d'un robot aspirateur Roomba.
Cependant, vous pouvez construire le vôtre avec un Raspberry Pi et des mouvements plus intelligents.
Vous aurez besoin d'une interface série Roomba 530 pour pouvoir vous connecter à votre Raspberry Pi.
De plus, vous utiliserez un package Javascript pour le codage. La box utilise également un RxTX pour communiquer avec le robot.
De plus, vous pouvez contrôler le Roomba avec un joystick et même régler votre niveau de sortie.
5. Robot à beurre
Le robot beurre intelligent peut enregistrer et diffuser des vidéos avec une excellente qualité. De plus, il peut enregistrer et produire de l'audio.
La meilleure partie est que vous n'avez besoin que d'un module de caméra Raspberry Pi et d'un périphérique USB pour capturer ces sons et ces vidéos.
Cependant, les composants du robot incluent :
- Raspberry Pi Zero W
- Module de caméra RPi
- Moteurs à courant continu
- Carte audio USB
- Pilote moteur L9110
- Conduit
- Batterie
- Servos 9g
- Interrupteur à glissière
- Orateur
En outre, vous pouvez utiliser ce robot via l'application Blynk, qui prend en charge le streaming vidéo.
6. Chat robotique Petoi
Vous pouvez construire un adorable chat robotique avec le projet de chat mécanique open source Nybble. De plus, vous pouvez utiliser des pièces en bois découpées au laser au lieu de pièces imprimées en 3D.
Les autres composants de ce projet incluent un Raspberry Pi 3B+, le kit Nybble et un Sparkfun Arduino Pro Mini.
De plus, vous pouvez contrôler le mouvement de ce robot avec un microcontrôleur compatible Arduino. Le chat robotique peut également stocker de la mémoire musculaire, ce qui lui permet de se rappeler comment se déplacer.
De plus, le Raspberry Pi dans ce projet vous permet d'ajuster le code Nybble et de donner des commandes simples.
7. Spot Micro
Le spot micro est une version plus petite du célèbre robot quadruple Spot. De plus, vous pouvez obtenir une allure de trot et une allure de marche avec des "modes de contrôle de commande d'angle" à trois axes.
Le robot fonctionne sur un Raspberry Pi 3B avec Ubuntu. De plus, il utilise un framework C++ et Python.
De plus, vous aurez besoin des composants suivants pour tenter ce projet :
- Raspberry Pi 3B
- Panneau LCD 15×2
- Carte d'asservissement PCA9685
- Batterie 4 000 mAh
- Régulateur de tension 5v
- Pièces imprimées en 3D
- Lider (facultatif pour le mappage des pièces)
8. Robot de combat miniature
Voulez-vous construire un puissant robot de combat ? Ensuite, vous pouvez essayer ce projet. À l'aide du Raspberry Pi Zero, vous pouvez traduire les entrées d'un contrôleur Bluetooth en commandes pour les contrôleurs de moteur de votre robot.
Au lieu d'utiliser un émetteur RC, le projet utilise une configuration de broches GPIO plus simple.
Cela aiderait si vous aviez une carte L298N pour la locomotion, un ESC Tarot TL300G pour faire tourner les moteurs sans balais et une batterie de 500Mah. Et vous avez vous-même un mini robot de combat sur un châssis imprimé en 3D.
9. Robot Dévastateur Raspberry Pi

Robot dévastateur
Comme son nom l'indique, vous pouvez construire un réservoir robotique avec un Raspberry Pi Zero W. L'ensemble de la construction comprend un support personnalisé imprimé en 3D, du code python et un circuit de contrôleur de moteur. Vous pouvez également ajouter une caméra montée.
Alternativement, vous pouvez trouver tout ce dont vous avez besoin pour ce projet sur la plateforme mobile Devastator Tank.
Derniers mots
Le Raspberry Pi est un mini-ordinateur polyvalent qui fonctionne pour diverses applications. La plupart des projets de robots Raspberry Pi que nous avons répertoriés dans cet article utilisent uniquement Python adapté aux débutants.
De plus, si vous ne trouvez pas tous les composants nécessaires à un projet, vous pouvez essayer des kits robotiques. L'achat d'un équipement automatique vous donnerait des détails prêts à l'emploi pour votre projet de robot.
Cependant, vous aurez besoin de compétences de base ou intermédiaires pour tenter l'un de ces projets.
Avez-vous des questions? N'hésitez pas à nous contacter, et nous serons heureux de vous aider.
Technologie industrielle
- Comment les imprimantes 3D construisent des objets métalliques
- Comment construire un circuit miroir de courant
- Comment créer une plate-forme robotique Arduino+Raspberry Pi
- Robot utilisant Raspberry Pi &Bridge Shield
- Robot boîtier CD Raspberry Pi
- Robot contrôlé par Wi-Fi utilisant Raspberry Pi
- Comment créer un programme de maintenance électrique
- Comment créer une feuille de route de produit IoT
- Comment construire un programme de maintenance électrique