


Considérations relatives à la conception de l'éclairage pour les systèmes de vision en chirurgie robotique
L'objectif de la robotique et de la chirurgie assistée par robot est de permettre aux chirurgiens d'effectuer des procédures complexes, auparavant indisponibles, avec une précision accrue, ce qui réduit les temps de chirurgie et de récupération, ainsi que les risques pour les patients. La chirurgie robotique a eu des impacts significatifs dans de nombreuses applications, notamment la prostatectomie, la néphrectomie et la chirurgie colorectale par hystérectomie. Avec les récentes avancées technologiques, il y a maintenant plus d'applications robotiques en développement que jamais auparavant.
Pour améliorer le flux de travail chirurgical, l'accès au site et les temps de récupération, de nouvelles innovations apparaissent dans tous les sous-systèmes de l'architecture robotique chirurgicale. L'amélioration de la qualité d'image avec une visualisation précise et cohérente permet aux chirurgiens de prendre des décisions chirurgicales plus éclairées au cours d'une procédure. Les systèmes de vision chirurgicale associent des caméras à large champ de vision à des composants d'éclairage à fibre optique ou à LED. Souvent, dans le développement de produits, cependant, les exigences de performance et la conception du système d'éclairage reçoivent beaucoup moins de temps et de ressources que la caméra.
Pour avoir un produit réussi, il faut considérer tous les sous-systèmes requis pour fournir un éclairage de haute qualité. Un exemple spécifique de cette situation est un laparoscope 3D haute définition utilisant une caméra à puce sur pointe.
Le système de vision chirurgicale 3D comporte quatre sous-systèmes clés :
- Système d'éclairage, qui éclaire la cible chirurgicale,
- La caméra (lentilles et capteur CMOS) pour capter la lumière du tissu,
- Micrologiciel pour contrôler la qualité et la latence de l'image, et
- Un système d'affichage (une combinaison d'affichages 2D et 3D).
Chaque sous-système a ses propres questions clés que l'équipe de conception doit prendre en compte.
Applications cliniques
Avant de concevoir un système d'éclairage robuste, l'ingénieur concepteur doit avoir une compréhension globale des objectifs de l'équipe clinique pour une intervention chirurgicale donnée. Souvent, un chef de produit agissant en tant que «Voix du client» identifiera un appareil prédicat et demandera la «meilleure qualité d'image». L'équipe de R&D devra traduire cette demande en exigences quantitatives, en identifiant les modalités d'imagerie et les limites numériques sur le FOV, la résolution, la précision des couleurs et le contraste de l'image à titre d'exemples, aboutissant éventuellement aux exigences complètes du produit. Dans cet article, nous allons considérer une source lumineuse pour un laparoscope 3D avec un champ de vision de caméra de 80° et une distance de travail de 5 à 100 mm. Nous considérerons principalement les applications de lumière blanche, mais discuterons également des considérations de fluorescence.
Pour élucider cela, nous considérons ici la conception d'un système d'éclairage à base de fibres, avec un moteur d'éclairage à LED installé dans un boîtier d'équipement confiné dans le cadre de «l'équipement capital», c'est-à-dire la tour de vision. L'équipement capital comprend le chariot qui abrite généralement les systèmes de vision et de contrôle supplémentaires de la plate-forme chirurgicale. L'architecture prévue du système chirurgical est un stéréo-laparoscope rigide destiné à être utilisé dans un système chirurgical robotisé. Pour réduire les risques liés au calendrier, à la sécurité et aux futurs besoins des utilisateurs liés à l'intégration de la fluorescence ou d'une autre imagerie dépendante de la source, nous envisagerons une solution à base de fibres. Les auteurs apprécient les progrès que les LED continuent de faire en termes de taille et d'efficacité et aborderont l'espace de conception à la fin de l'article.
Considérations d'éclairage pour la chirurgie robotique
La figure 1 met en évidence les principales architectures système du système d'éclairage pour une plate-forme de chirurgie robotique. Pour fournir de la lumière à la lunette, une source d'éclairage - dans ce cas, un moteur de lumière - est nécessaire. Le moteur de lumière couplera la lumière dans un cône de fibre, si nécessaire, puis la transmettra aux fibres qui transmettront la lumière à la pointe.
Le moteur léger est une source lumineuse installée dans les biens d'équipement. Il existe différentes architectures pour ces sources, mais elles peuvent être divisées en deux types principaux. Certains moteurs d'éclairage utiliseront une seule source à large bande, tandis que d'autres profiteront du mélange de LED à bande étroite pour créer une source à large bande. Une seule LED à large bande risque de devoir corriger la lumière bleue en raison de l'architecture de la LED blanche qui utilise une LED bleue pour activer un luminophore. Une forte proportion de lumière bleue est absorbée par les tissus rouges. Le signal bleu élevé dans les spectres peut entraîner des difficultés lors de l'étape de réglage des couleurs et, potentiellement, des images qui semblent trop numérisées ou "fausses". Une approche LED RVB mixte peut éliminer les problèmes de lumière bleue excessive, mais nécessite des optiques plus complexes dans le moteur de lumière afin de coupler les trois sources dans le système. Si le système nécessite un éclairage proche infrarouge (NIR), les LED NIR sont également installées dans le moteur d'éclairage, ce qui rend la conception plus compacte.
En logeant les LED RVB et NIR dans le même boîtier, les sources lumineuses peuvent partager les mêmes fibres qui transmettent la lumière à la pointe. Cela maximise l'efficacité du système d'éclairage de l'endoscope. Pour transférer la lumière du moteur de lumière à la pointe de l'endoscope, une fibre optique à grande ouverture numérique (NA) est nécessaire ainsi qu'un système optique pour relayer la lumière de la source à la pointe. Le terme pour décrire la sortie angulaire d'une fibre est l'ouverture numérique, ou NA. Plus la NA est élevée, plus la sortie angulaire de la fibre est élevée. Le NA est égal au sinus de l'angle le plus élevé pouvant entrer et sortir de la fibre. Le NA de la fibre est déterminé par l'indice de réfraction du cœur et de la gaine de la fibre. Plus la NA est élevée, plus l'angle de lumière sortira de la fibre, éclairant un pourcentage plus élevé du champ de vision.
Pour obtenir les meilleures performances du câble à fibre optique, l'équipe de conception doit tenir compte de la relation entre la sortie du moteur d'éclairage et le câble à fibre optique. Une solution courante consiste à utiliser un cône de fibre pour augmenter l'angle de la lumière entrant dans l'endoscope. Le cône de fibre est généralement installé sur l'extrémité proximale de l'endoscope où le câble de lumière se connecte. Le cône de fibre convertit la sortie à angle faible et à grande surface du moteur de lumière en une sortie à angle élevé et à petite surface.

Le NA de la lumière sortant de la boîte à lumière est généralement de l'ordre de 0,5 NA, les angles associés à la robotique chirurgicale peuvent atteindre 0,87 NA ou plus. Les fibres qui se connectent à la boîte à lumière doivent être égales à la sortie NA de la boîte à lumière. Le cône convertira la lumière à angle faible en lumière à angle élevé pour obtenir l'angle d'éclairage le plus large. La figure 2 montre ce qui arrive à un faisceau de lumière entrant et sortant du cône.

Une alternative à l'utilisation d'un cône pour atteindre des angles de sortie élevés consiste à concevoir une lentille pour diffuser la lumière sortant de la pointe du laparoscope. Un système d'éclairage assisté par objectif permet des angles de sortie plus élevés, ce qui permet d'utiliser des caméras à champ de vision plus élevé dans le corps, mais se fait au prix d'une conception moins compacte.
Une fois que la lumière est transmise aux fibres optiques du laparoscope, les fibres sont conditionnées pour produire de la lumière à travers la pointe, illustrée à la figure 3. Ceci est plus avantageux que d'avoir une seule face de sortie de lumière pour deux raisons. Premièrement, cela permet une intégration plus facile des fibres dans l'endoscope, et deuxièmement, cela empêche les ombres indésirables des outils chirurgicaux d'avoir un impact sur l'image.

Considérations relatives à l'étalonnage et aux tests
Lors de la conception de la source lumineuse, l'équipe doit également tenir compte du pipeline de signal d'image (ISP) qui convertira l'image capturée et l'affichera sur un moniteur 2D et 3D haute définition pour l'équipe chirurgicale. L'ISP peut avoir divers étalonnages qui sont appliqués au système, y compris la non-uniformité du signal sombre sur le capteur d'image, la non-uniformité de la photo-réponse, l'étalonnage des couleurs et l'équilibrage des blancs. Ces calibrages permettent des corrections qui créent une image de haute qualité; cependant, si le FAI s'appuie trop sur les étalonnages, l'image peut sembler hautement traitée et distraire l'équipe chirurgicale.
Un FAI aura des blocs qui nécessitent un étalonnage de chaque unité. Les données d'étalonnage sont généralement enregistrées dans la mémoire installée sur l'endoscope. Commencer tôt la définition du processus d'étalonnage et se coordonner avec les ingénieurs de développement du FAI réduira le risque de problèmes de développement à un stade avancé. En prenant en compte le FAI et les étalonnages à un stade précoce, plusieurs révisions de la source lumineuse et du micrologiciel sont possibles avant le lancement du produit. Les étalonnages ont des limites, et si le système d'éclairage est conçu plus près de l'utilisation chirurgicale prévue, moins de dépannage des étalonnages dans le processus de développement est nécessaire.
Des exemples d'étalonnages liés à la source d'éclairage sont la non-uniformité de la photo-réponse (PRNU), la balance des blancs et la correction des couleurs. Ces étalonnages sont tous limités dans leur efficacité si la source lumineuse elle-même a une conception inférieure. Le fait de se fier aux étalonnages pour « corriger » la conception de la source lumineuse peut donner à l'image produite un aspect sur-traité. De plus, si le FAI doit avoir de la mémoire allouée aux étalonnages, il y a un risque d'augmenter la latence du système de vision, limitant les performances robotiques.
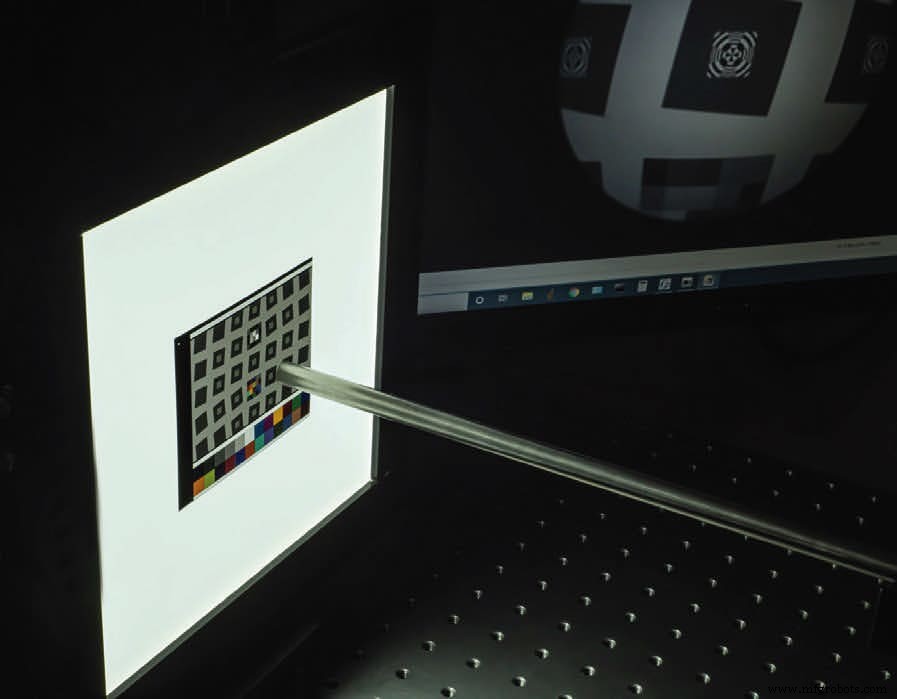
Enfin, après la conception du moteur de lumière, de l'éclairage, de l'optique d'imagerie et du micrologiciel de la caméra, des tests appropriés sont nécessaires. Souvent, les composants du système d'éclairage nécessitent une inspection et un étalonnage à 100 % sur les sources des biens d'équipement et des laparoscopes. Ces tests nécessitent de faire fonctionner l'appareil testé dans diverses conditions à l'aide de cibles spécialisées pour mesurer la précision, l'uniformité et la puissance de sortie des couleurs. La conception d'un système pour automatiser ces tests réduit le risque de variabilité d'une pièce à l'autre et d'un testeur à l'autre, garantissant ainsi le maintien des normes de produit sur le terrain. Ces stations de test nécessitent une conception mécanique, système et logicielle détaillée pour garantir leur déploiement réussi sur les sites de fabrication.
Il existe d'autres considérations pour l'endoscopie ou les applications d'endoscope flexibles. Ces appareils ont souvent plus de limitations sur l'espace disponible pour l'éclairage, peuvent n'avoir que des images 2D, être à usage unique ou d'autres mises en garde ne concernant pas les paramètres présentés dans l'article. Pour les dispositifs de petit diamètre et à usage unique, les fibres plastiques, les LED dans la pointe et d'autres solutions plus compactes peuvent permettre un produit réussi, dans lequel différentes considérations de conception et d'atténuation des risques sont prises en compte.
Pour résumer, le développement des composants d'éclairage pour les systèmes de chirurgie robotique est un processus complexe. Il faut partir d'une compréhension complète de l'application clinique et s'appuyer sur cette compréhension. Si l'on conçoit un système robotique pour les applications de lumière blanche et NIR, nous recommandons une conception basée sur l'utilisation d'une fibre à haute NA avec un moteur de lumière installé dans l'équipement capital. Pour obtenir l'angle d'éclairage le plus large, il est recommandé d'utiliser des fibres à haute NA pour fournir de la lumière à la pointe de l'appareil. Il s'agit de l'approche de conception la plus concise qui évite une conception trop complexe. D'autres solutions peuvent entraîner des lacunes dans les fonctionnalités, entraînant une conception de solution de contournement.
Cet article a été rédigé par Jonathan Brand, ingénieur en systèmes optiques, et Neil Anderson, PhD, vice-président des ventes et du marketing, Gray Optics (Portland, ME). Pour plus d'informations, contactez Neil Anderson à Cette adresse e-mail est protégée contre les robots spammeurs. Vous devez activer le JavaScript pour la voir., ou visitez ici .
Capteur
- Échecs probables dans les systèmes non prouvés
- 6 considérations de conception importantes pour l'impression 3D métal
- Conception de commandes de moteurs pour systèmes robotiques
- Blog :Conception de cartouches microfluidiques pour un système IVD
- Les avantages de l'utilisation de la vision robotique pour les applications d'automatisation
- Système photorécepteur pour la régulation de la mélatonine et la photothérapie
- Considérations importantes pour l'assemblage de PCB
- Considérations relatives à la conception de l'impédance pour les PCB flex-rigides
- Partie 1 :Considérations relatives à la conception des refroidisseurs pour les compresseurs centrifuges