


Démolition d'une voiture semi-autonome pour conducteurs handicapés
Cette histoire fait partie d'un projet spécial AspenCore sur la technologie des voitures semi-autonomes.
Découvrez les autres articles de ce projet spécial :
 Présentation du projet spécial SAM Technology
Présentation du projet spécial SAM Technology  Comment construire une voiture pour quelqu'un qui ne peut pas conduire
Comment construire une voiture pour quelqu'un qui ne peut pas conduire  Les yeux l'ont
Les yeux l'ont  Modifions une voiture
Modifions une voiture Visitez la page d'accueil des projets spéciaux pour en savoir plus sur ce projet et d'autres sujets couverts par le réseau AspenCore .
Comment construire un système permettant à une personne à mobilité réduite de conduire une voiture ? Arrow Electronics a répondu à cela avec son projet de voiture semi-autonome (SAM). En s'appuyant principalement sur des produits standard (OTS) et en construisant les quelques éléments dont ils avaient besoin et qui n'étaient pas disponibles dans le commerce, les ingénieurs de l'équipe SAM ont intégré un système qui prendrait les entrées des capteurs et les alimenterait dans un drive-by-wire système.
Habituellement, le but d'un démontage est d'ouvrir un système pour découvrir ce que le fabricant avait scellé pour un certain nombre de raisons (par exemple, la sécurité du produit, l'intégrité du produit, pour protéger la propriété intellectuelle - ou la propriété intellectuelle), mais Arrow était toujours prêt à dire ce qui est entré dans la voiture SAM, ce ne sera donc pas un démontage typique. Ce que nous avons, c'est une liste assez complète de tous les éléments du système, y compris la nomenclature (BOM) pour le contrôleur d'interface homme-machine (IHM) conçu par Arrow.
En bref, une voiture SAM est conduite à l'aide de deux systèmes de capteurs clés. Un ensemble de quatre caméras de suivi de mouvement capture les mouvements de la tête du conducteur pour la direction. Il y a aussi un capteur sip/puff qui mesure la pression; le conducteur inspire (buvette) à travers un tube pour freiner, et expire (bouffées) pour accélérer. Il existe également un système de navigation basé sur GPS qui peut être activé pour empêcher la voiture de dévier radicalement de sa trajectoire. Les données des capteurs sont traitées et introduites dans un système drive-by-wire fourni par un sous-traitant. Des détails supplémentaires se trouvent dans l'histoire d'accompagnement sur EETimes :Comment construire une voiture pour quelqu'un qui ne peut pas conduire.
Une grande partie du travail critique a été effectuée dans le logiciel. Cela comprenait le réglage fin des systèmes de navigation et la façon dont les données des capteurs étaient utilisées pour contrôler le véhicule en fin de compte.
La plupart des sous-systèmes physiques non utilisés directement pour la conduite (qui incluraient les capteurs d'entrée, les actionneurs à commande électrique et l'appareil à sécurité intégrée du copilote) sont installés derrière le conducteur ; dans le cas de la Chevrolet Corvette qui a été utilisée comme première voiture SAM, c'était dans le coffre. Ces sous-systèmes sont répertoriés sur la photo suivante.
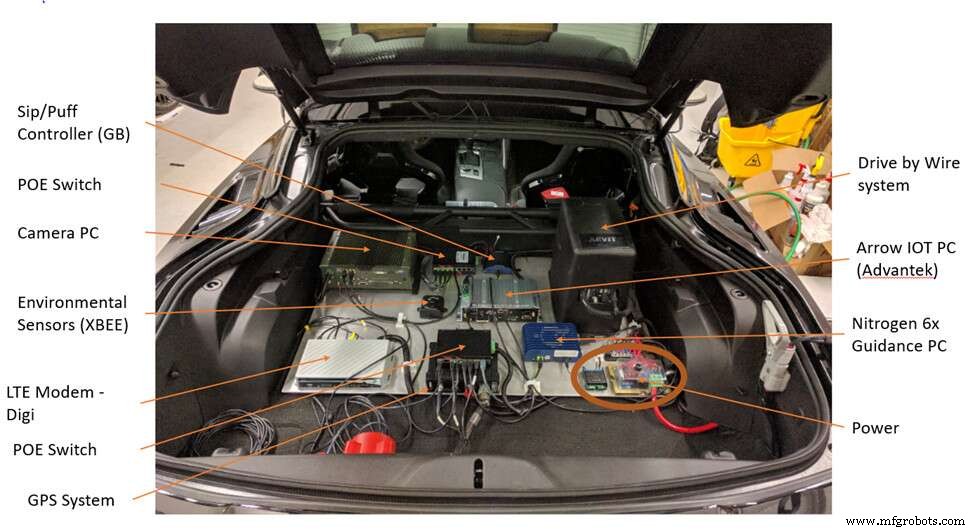
L'équipe du projet SAM d'Arrow Electronics a utilisé le coffre de la Chevrolet Corvette Stingray pour stocker la plupart des sous-systèmes nécessaires pour aider un conducteur tétraplégique à conduire le véhicule. Source : Flèche Électronique.
Contrôleur sip/puff
Le contrôleur sip/puff mesure non seulement la pression pour contrôler l'accélération et le freinage, il peut également être utilisé pour fournir un retour (visuel, audio et/ou haptique) sur ces niveaux au conducteur. Les composants clés de cette carte sont :
- un microcontrôleur K64 de NXP (à l'origine Freescale). Il combine un microcontrôleur Cortex 120 MHz avec 1 Mo de Flash et 256 Ko de SRAM.
- Capteur de pression MPXV7025GP (NXP)
- Codec audio stéréo SGTL5000 (NXP)
- Pilote PCA9626B 24 LED (NXP)
- Périphériques de prise en charge de l'alimentation par Ethernet (PoE) - divers (périphériques analogiques)
- PHY Ethernet (puce)
La nomenclature de la carte comprend également de l'EEPROM ; une variété de résistances, de condensateurs et de commutateurs provenant de plusieurs sources ; et d'autres composants.
Le capteur de pression MPXV7025GP de NXP Source : Flèche Électronique
Ordinateur de guidage
L'ingénieur SAM Josh Willis a déclaré que l'ordinateur de guidage "agrége les valeurs de direction et de gaz/frein, puis agit comme un ensemble de commandes manuelles pour s'interfacer avec le système de conduite par fil via le bus CAN". Il est appelé sur la photo ci-dessus sous le nom de Nitrogen 6X Guidance PC, une boîte bleue vers le coin inférieur droit du coffre de la voiture. L'ordinateur monocarte Nitrogen 6X (SBC) est un produit standard. Basée sur le processeur i.MX 6 ARM-Cortex A9 de NXP, la carte est également livrée en standard avec 1 Go de DDR3 et Gigabit Ethernet. Arrow a demandé à Boundary Devices une seule modification :la possibilité de prendre en charge PoE.
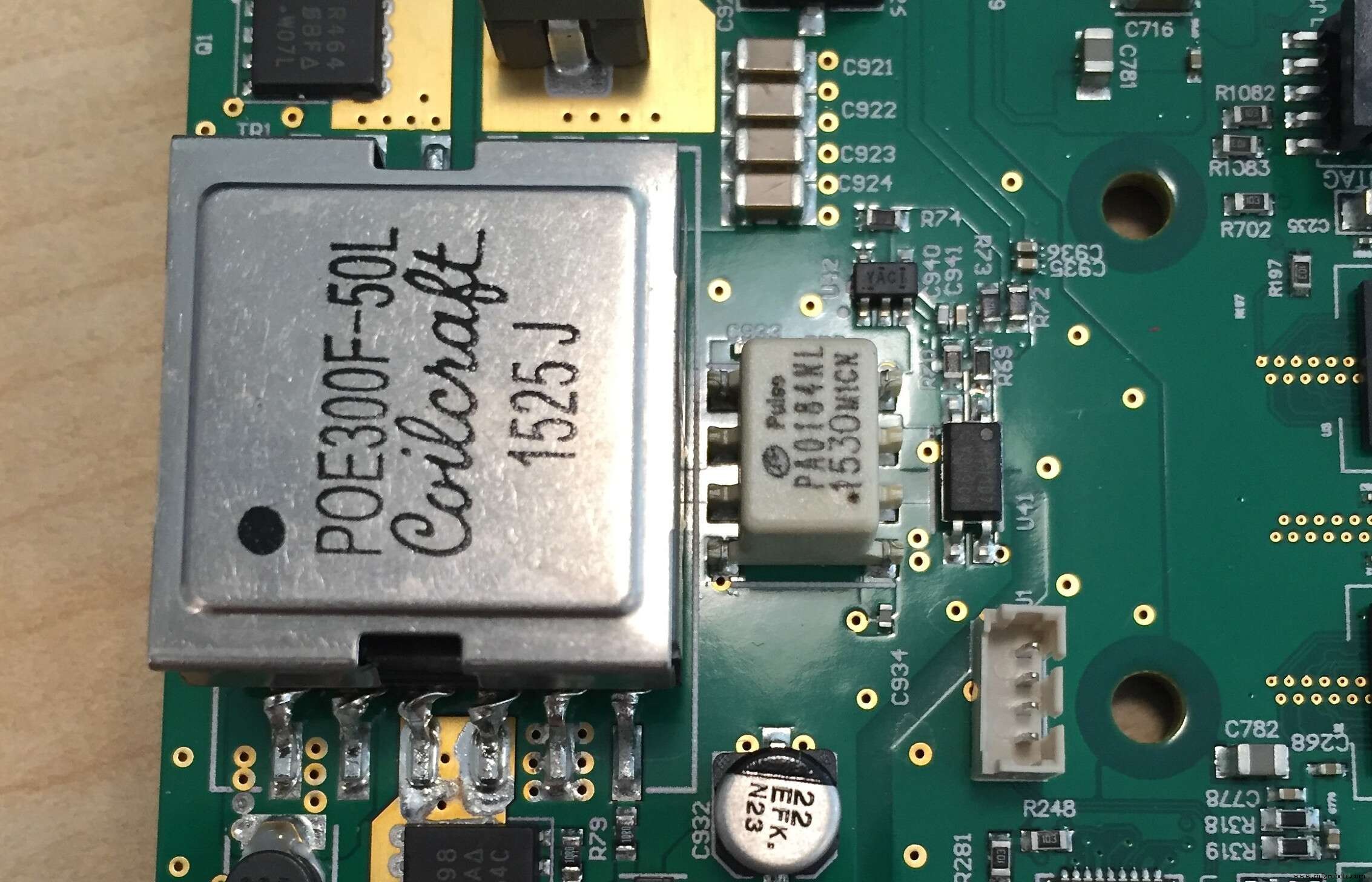
L'équipe automobile SAM s'est principalement appuyée sur des sous-systèmes standard. Lorsqu'une modification était nécessaire, il s'agissait souvent d'ajouter la prise en charge du PoE. Source : Flèche Électronique
Technologie de l'Internet des objets
- Amélioration continue Lean – Principaux moteurs de l'amélioration continue
- Autonomous Driving AI for Donkey Car Garbage Collector
- Première pédale de frein entièrement en plastique pour voiture de sport électrique à batterie
- Que peut apporter la 5G pour la voiture connectée ?
- Sécurité :une priorité absolue pour les voitures du futur
- Comment améliorer la livraison du dernier kilomètre pour les petits envois
- Plaidoyer pour la 5G dans le secteur manufacturier
- La ligne de transfert réduit les délais pour le constructeur automobile
- Conseils aux camionneurs pour manger sainement sur la route