


Une approche plus efficace pour développer des régulateurs de tension automatiques AC-AC
Le développement des AVR s'est déplacé vers des systèmes à commande numérique construits avec des microcontrôleurs 8 bits, mais les ASIC programmables à signaux mixtes offrent des avantages en termes de réduction des coûts et de la taille, ce qui est particulièrement important pour les petits AVR portables très populaires dans certaines régions.
Les régulateurs de tension automatiques (AVR) sont utilisés pour réguler un niveau de tension fourni en compensant les fluctuations des tensions entrantes. Les AVR sont également communément appelés stabilisateurs de tension et ont des applications dans de nombreuses applications industrielles et résidentielles. Par exemple, les AVR sont utilisés dans les groupes électrogènes sur les navires, dans les alimentations d'urgence et sur les plates-formes pétrolières pour stabiliser les niveaux de tension lors des fluctuations de la demande d'électricité.
Pour les entreprises de distribution d'électricité, la régulation de la tension dans le réseau de distribution est une responsabilité clé déterminant la qualité de l'énergie fournie aux consommateurs finaux. À cette fin, les entreprises de services publics doivent assurer une planification appropriée à court et à long terme, la maintenance de l'équipement électrique et le déploiement de régulateurs sur les lignes de distribution. Cependant, cela peut être une tâche difficile, en particulier dans certaines régions du monde. Dans de nombreux pays d'Asie du Sud, dont le Pakistan, l'Inde et le Bangladesh, le système de distribution d'électricité est fragile en raison de problèmes de vol d'électricité et d'une pénurie de production d'électricité, ce qui peut entraîner des périodes de délestage et d'autres perturbations. En conséquence, les utilisateurs finaux peuvent être confrontés à des problèmes de fluctuations de la tension des lignes électriques. Par conséquent, pour assurer la sécurité et le bon fonctionnement des appareils coûteux tels que les climatiseurs, les réfrigérateurs et les téléviseurs, l'utilisation de petits AVR portables est très populaire. Les AVR sont des appareils faciles à utiliser qui fonctionnent généralement dans une plage prédéfinie de niveaux de tension (par exemple, 150 V à 240 V ou 90 V à 280 V).
Sur le plan fonctionnel, les AVR utilisent généralement un autotransformateur à prises pour maintenir la sortie CA dans une plage acceptable. Un mécanisme de rétroaction est utilisé pour contrôler la position des prises en commutant les relais appropriés pour réguler la tension de sortie. Celui-ci se compose généralement de deux unités :une unité de détection et une unité de régulation. Le travail de l'unité de détection est de déterminer les niveaux de tension d'entrée et de sortie du stabilisateur, tandis que l'unité de régulation maintient la tension de sortie dans des limites prédéterminées acceptables.
Traditionnellement, les circuits intégrés d'ampli op sont utilisés en conjonction avec des comparateurs analogiques pour le contrôle dans les conceptions d'AVR à relais. Plus récemment, l'utilisation de microcontrôleurs 8 bits (MCU) a considérablement augmenté dans les AVR disponibles dans le commerce à commande numérique. Cependant, des fonctionnalités et caractéristiques similaires peuvent être obtenues à l'aide des ASIC (circuits intégrés spécifiques à l'application) programmables GreenPAK™ à faible coût de Dialog Semiconductor. Ce remplacement peut être avantageux en termes de coût réduit et d'espace requis, et pas besoin de programmer explicitement un MCU.
Dans cet article, nous expliquons comment les développeurs peuvent utiliser des ASIC programmables tels qu'un circuit intégré GreenPAK SLG46537V pour développer un AVR. La conception globale du système et la conception GreenPAK seront décrites en détail. Pour valider la faisabilité et l'opérabilité de cet AVR, nous présentons également les résultats expérimentaux obtenus à partir d'un prototype.
Conception du système
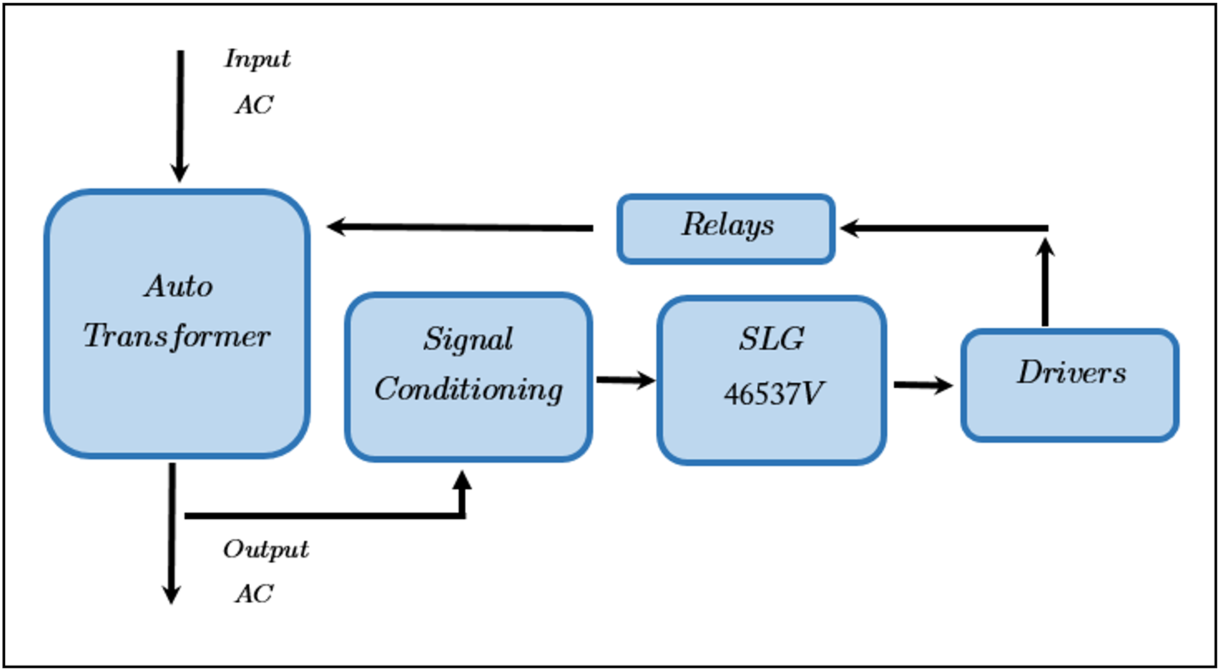
Figure 1 :Schéma fonctionnel. (Source :BarqEE)
Le schéma fonctionnel de la conception AVR proposée est illustré à la figure 1. Le système est essentiellement basé sur un mécanisme de rétroaction. La tension CA à la sortie de l'AVR est conditionnée pour la réduire aux limites fonctionnelles CC du circuit intégré SLG46537V. En fonction de la tension détectée, les relais appropriés sont pilotés par le circuit intégré pour sélectionner les enroulements de prise appropriés sur l'autotransformateur.
Les spécifications d'un AVR dépendent de l'application particulière. Dans cet article, notre AVR a les spécifications suivantes :
- La tension d'entrée varie de 125 V à 240 V.
- La tension de sortie est régulée entre 200 V et 240 V.
- Des fonctions de protection contre les sous-tensions et les surtensions sont fournies. Lorsque la tension de sortie de l'AVR tombe en dessous de 180 V (sous-tension) ou dépasse 255 V (surtension), l'alimentation de sortie est déconnectée.
- Quatre relais électromécaniques sont utilisés dans la conception de l'AVR.
- Un autotransformateur est utilisé pour l'élévation de tension qui a une connexion neutre de 0 V et quatre prises supplémentaires à 135 V, 174 V, 196 V et 220 V.
- La forme d'onde et la fréquence de sortie sont inchangées par rapport à l'entrée.
- La conception de l'AVR (contrôleur) est peu coûteuse.
- Les indicateurs LED sont utilisés pour signaler des conditions normales, de surtension ou de sous-tension.
Notez que ces spécifications sont arbitraires. Les spécifications données peuvent être facilement ajustées dans la configuration du GreenPAK IC en fonction de l'application réelle.
Design fonctionnel
cliquez pour l'image en taille réelle
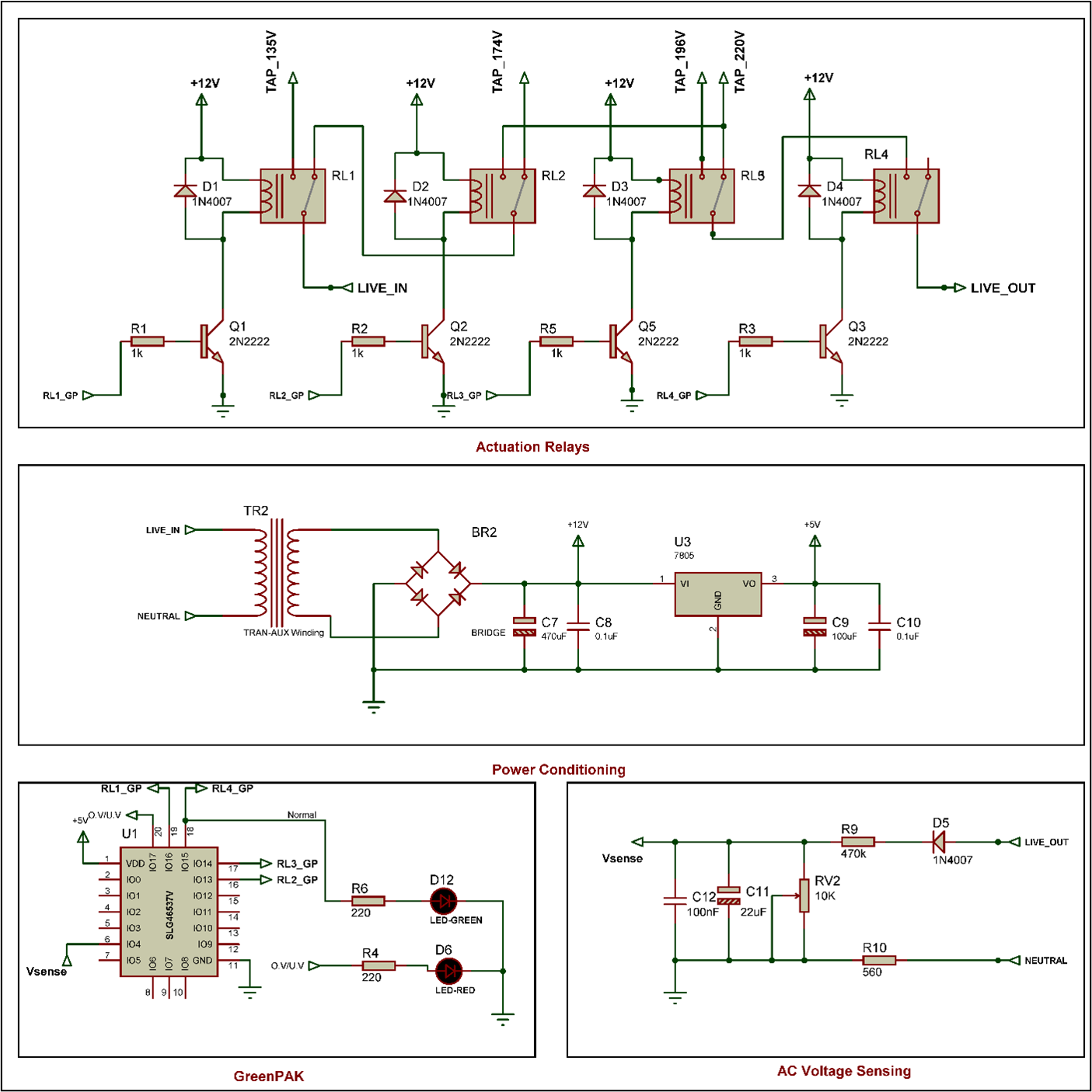
Figure 2 :Conception AVR proposée. (Source :BarqEE)
La figure 2 montre la conception fonctionnelle proposée de l'AVR utilisant le circuit intégré SLG46537V.
Conditionnement de puissance
Le bloc de conditionnement d'alimentation alimente le GreenPAK IC. Il prend le courant alternatif en entrée et le réduit à 12 V, qui est ensuite converti en 5 VCC à l'aide d'un circuit intégré régulateur de tension approprié.
Détection de tension alternative
Pour la détection de tension, la tension alternative de sortie (Live_out ) est abaissé et redressé pour obtenir un niveau continu de basse tension à l'aide d'un réseau de diodes et diviseur résistif. Par la suite, un filtre de sortie (condensateur électrolytique) est utilisé pour minimiser l'ondulation et obtenir une tension continue constante et lisse. Un condensateur de dérivation est également utilisé pour filtrer les transitoires. Par conséquent, une tension continue filtrée (Vsense ) Est obtenu. Pour s'assurer que les niveaux de tension CC sont compatibles avec le circuit intégré, un facteur de réduction de (environ) 0,01 a été utilisé (c'est-à-dire 200 VCA 2 VCC).
GreenPAK
Utilisation de Vsense et sur la base de la logique GreenPAK (Section 2), le circuit intégré pilote les relais requis (via les BJT) pour l'actionnement. Les sorties numériques du circuit intégré sont également utilisées pour basculer les indicateurs LED pour informer l'utilisateur des conditions normales et de sur/sous-tension de l'AVR. Les schémas du circuit intégré, montrant les connexions IO, ont été fournis à titre de référence.
Activation
Trois relais électromécaniques (RL1, RL2 et RL3) sont utilisés pour commuter la tension alternative d'entrée (Live_in ) connexion entre les prises 135 V, 174 V, 196 V et 220 V de l'autotransformateur. Un quatrième relais électromécanique (RL4) est utilisé pour déconnecter la sortie AVR en cas de conditions de sous-tension ou de surtension, évitant ainsi tout dommage à la charge connectée à la sortie AVR.
GreenPAK Logic
Le fichier de conception complet créé dans le logiciel GreenPAK Designer (disponible gratuitement) peut être trouvé ici.
cliquez pour l'image en taille réelle
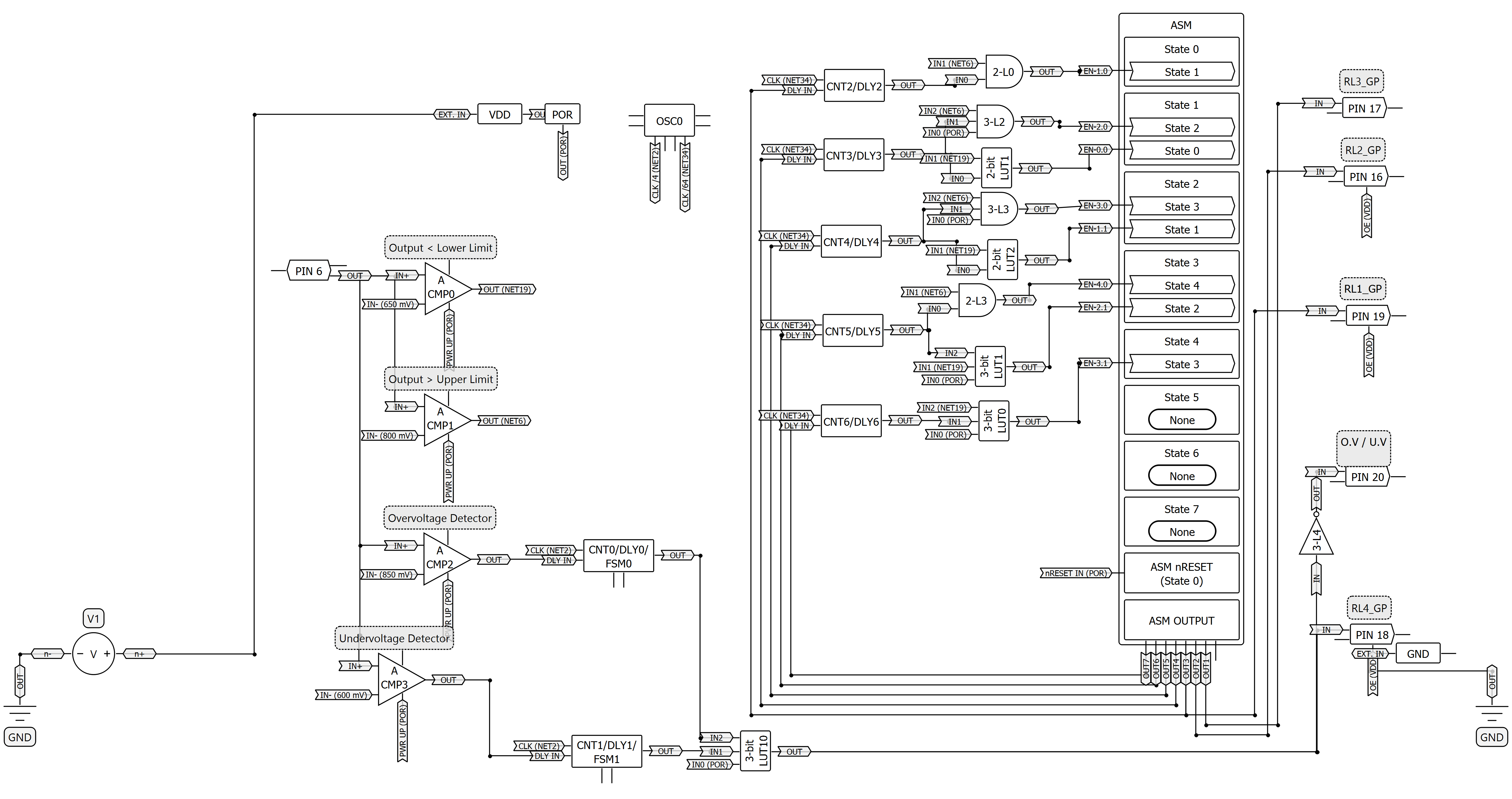
Figure 3 :Schéma de conception GreenPAK. (Source :BarqEE)
La figure 3 montre le schéma de la conception GreenPAK. Vense est alimenté à différents comparateurs à l'aide de la broche 6. Les comparateurs analogiques ACMP0 et ACMP1 sont utilisés pour la régulation dans la plage de fonctionnement normale de l'AVR, tandis que ACMP2 et ACMP3 sont utilisés pour la détection de surtension et de sous-tension. Étant donné que la référence interne maximale des comparateurs ne peut pas être supérieure à 1,2 V, un gain de 0,33 est utilisé pour garantir que la tension de sortie peut être comparée et correctement classée dans différentes plages. Les références des comparateurs sont fixées pour répondre aux spécifications décrites dans la section 1.2. Un bloc de machine à états asynchrone (ASM) est utilisé pour configurer une machine à états finis pour la régulation de la tension.
cliquez pour l'image en taille réelle
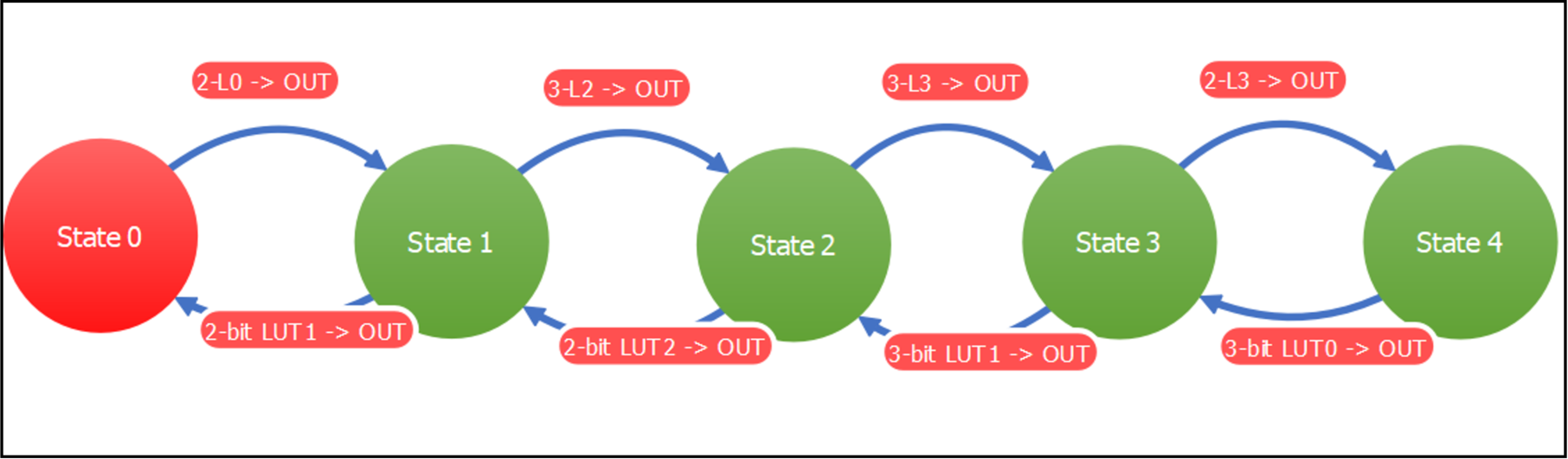
Figure 4 :Machine à états finis. (Source :BarqEE)
La figure 4 décrit les cinq états utilisés. Dans chaque état, les relais 1, 2 et 3 sont actionnés à l'aide des sorties ASM OUT3, OUT2 et OUT1 respectivement. Cela permet de sélectionner les prises appropriées de l'autotransformateur et par conséquent le rapport de rotation de l'autotransformateur. Le passage de l'état 0 à 4 provoque une diminution progressive du rapport de tours de l'autotransformateur. Le tableau 1 montre la correspondance de chaque état aux rapports de tours.
Tableau 1 :ratios de virage AT correspondant à chaque état (Source :BarqEE)
État 0 1 2 3 4 Rapport de virage AT 220/135 1,63 196/135 1,45 220/174 1,26 196/174 1,13 220/220 =1
La régulation de tension est réalisée à l'aide d'une transition d'état qui se produit si Live_out est supérieur à la limite supérieure (≈ 240 VAC, définie par référence d'ACMP1) ou inférieure à la limite inférieure (≈ 200 VAC, définie par référence d'ACMP0). Si un état ne produit pas le niveau de tension de sortie régulé souhaité (200 V
Pour garantir le bon fonctionnement des relais électromécaniques, les transitions d'état abruptes sont contrôlées en utilisant des retards dans la rétroaction du bloc ASM. A cette fin, les sorties du bloc ASM OUT3, OUT4, OUT5, OUT6 et OUT7 sont respectivement envoyées aux blocs de retard DLY2, DLY3, DLY4, DLY5 et DLY6. La figure 5 décrit la configuration du bloc RAM de l'ASM, où l'état de chacune des sorties binaires OUT0 – OUT7 est affiché.
Les états sont conservés pendant une durée prédéfinie tp (≈ 0,5 s) fixée dans les temporisations. Les transitions d'état ne se produisent que si Live_out reste en dehors de la plage souhaitée pendant au moins tp. Les sorties des retards sont renvoyées à différentes LUT (et blocs AND) avec les sorties d'ACMP0 et ACMP1, comme le montre la figure 4. Cela garantit que les transitions d'état ne se produisent qu'une fois que tp s'est écoulé et que Live_out est hors de la plage souhaitée. La transition d'état particulière dépend des sorties de ACMP0 et ACMP1. Par exemple, si l'état 1 est retenu pour tp, aucune transition n'est possible vers l'état 0 et l'état 2. Si le niveau de tension souhaité a été atteint, l'état 1 est maintenu. Sinon, une transition vers l'état 0 et l'état 2 se produit selon que Live_out est supérieur à la limite supérieure ou inférieur à la limite inférieure.
Une autre caractéristique importante de la conception GreenPAK proposée est la protection en cas de surtension et de sous-tension. Les comparateurs ACMP2 et ACMP3 sont utilisés respectivement pour les conditions de surtension et de sous-tension. La sortie de l'ACMP2 et la sortie inversée de l'ACMP3 sont transmises aux blocs de retard DLY0 et DLY1 pour garantir que les conditions de surtension et de sous-tension ne sont détectées pour aucun transitoire. Par la suite, les sorties de DLY0 et DLY1 sont transmises à un bloc LUT qui décide s'il s'agit d'une condition normale, de surtension ou de sous-tension. Dans des conditions normales, RLY4 est maintenu sous tension et l'AVR régule la tension. Dans le cas contraire, aucune régulation n'est possible et RLY4 déclenche. Des indications pour les conditions normales, de surtension et de sous-tension sont également fournies à l'utilisateur. Résultats expérimentaux
Matériel expérimental cliquez pour l'image en taille réelle
La figure 6 montre la configuration expérimentale du prototype. Un Variac est utilisé pour contrôler la tension CA d'entrée fournie à l'AVR. L'AVR contient un autotransformateur et un PCB qui contient les circuits de commande. Une carte de développement GreenPAK est connectée au PCB pour contrôler les relais électromécaniques. Un oscilloscope est utilisé pour enregistrer les tensions d'entrée et de sortie. cliquez pour l'image en taille réelle
La figure 7 montre le circuit PCB où les relais électromécaniques, les BJT et d'autres composants auxiliaires sont montés.
Données de performances AVR
Les données de performance de l'AVR sont résumées ci-dessous :
Résultats de l'oscilloscope
Les figures suivantes montrent les journaux de l'oscilloscope pour l'expérimentation. Les marqueurs jaunes et bleus indiquent respectivement les tensions d'entrée et de sortie. cliquez pour l'image en taille réelle
La figure 8 représente le résumé quantitatif des résultats expérimentaux pour la fonctionnalité normale de l'AVR. La tension d'entrée est balayée dans une plage de tension (faible à élevée) et la tension de sortie correspondante est observée. Le circuit intégré entraîne avec succès les relais pour changer les prises de l'autotransformateur et donc le rapport de tours de 1,63 à 1 pour la régulation de la tension. cliquez pour l'image en taille réelle
La figure 9 montre la fonctionnalité normale de l'AVR où le rapport de prise pour tours de 1,63 est déterminé et sélectionné avec succès. cliquez pour l'image en taille réelle cliquez pour l'image en taille réelle
La figure 10 illustre les formes d'onde des tensions d'entrée et de sortie lorsque la condition de surtension approche. Les deux ont des formes d'onde similaires car le rapport de prise pour les tours est de 1.
La figure 11 montre le cas de la condition de surtension. On peut voir que la tension de sortie s'est effondrée car l'AVR a déclenché avec succès RL4 pour la protection. cliquez pour l'image en taille réelle cliquez pour l'image en taille réelle
La figure 12 décrit les formes d'onde de tension d'entrée et de sortie lorsque la condition de sous-tension approche. L'AVR sélectionne le robinet pour le rapport de tours maximum (1,63) dans cette condition.
La figure 13 montre le cas de la condition de sous-tension. On peut observer que la tension de sortie chute lorsque RL4 a été déclenché pour la protection.
Notez qu'il n'y a pas de changement de fréquence ou de déphasage des tensions d'entrée et de sortie lorsque l'AVR régule. Conclusions
Dans cet article, nous avons décrit l'utilisation d'ASIC programmables tels qu'un circuit intégré GreenPAK SLG46537V en tant que contrôleur pour les AVR, qui sont populaires dans les applications résidentielles et industrielles. L'ASIC peut remplacer les composants discrets et les MCU actuellement utilisés dans ces applications. Le rôle du SLG46537V dans l'AVR proposé a été illustré et la conception du GreenPAK a été expliquée en détail. De plus, les détails des expériences sur un prototype d'AVR ont été présentés pour valider la conception proposée.
Nous concluons que le circuit offre de nombreuses capacités pour servir de contrôleur, en particulier dans les AVR résidentiels. Par conséquent, les unités de contrôle pour les AVR peuvent être conçues à l'aide du circuit intégré qui sont peu coûteux et réduisent l'encombrement du PCB. Des contrôleurs plus sophistiqués peuvent être conçus à l'aide d'autres ASIC offrant des ASM avec plus d'états.
Contenus associés :
Pour plus d'informations sur Embedded, abonnez-vous à la newsletter hebdomadaire d'Embedded.
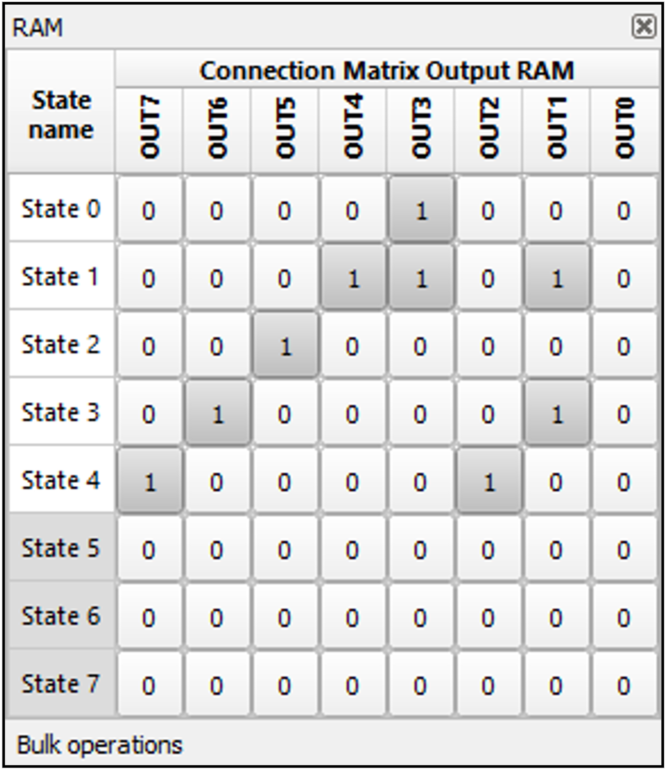
Figure 5 :Bloc RAM. (Source :BarqEE)
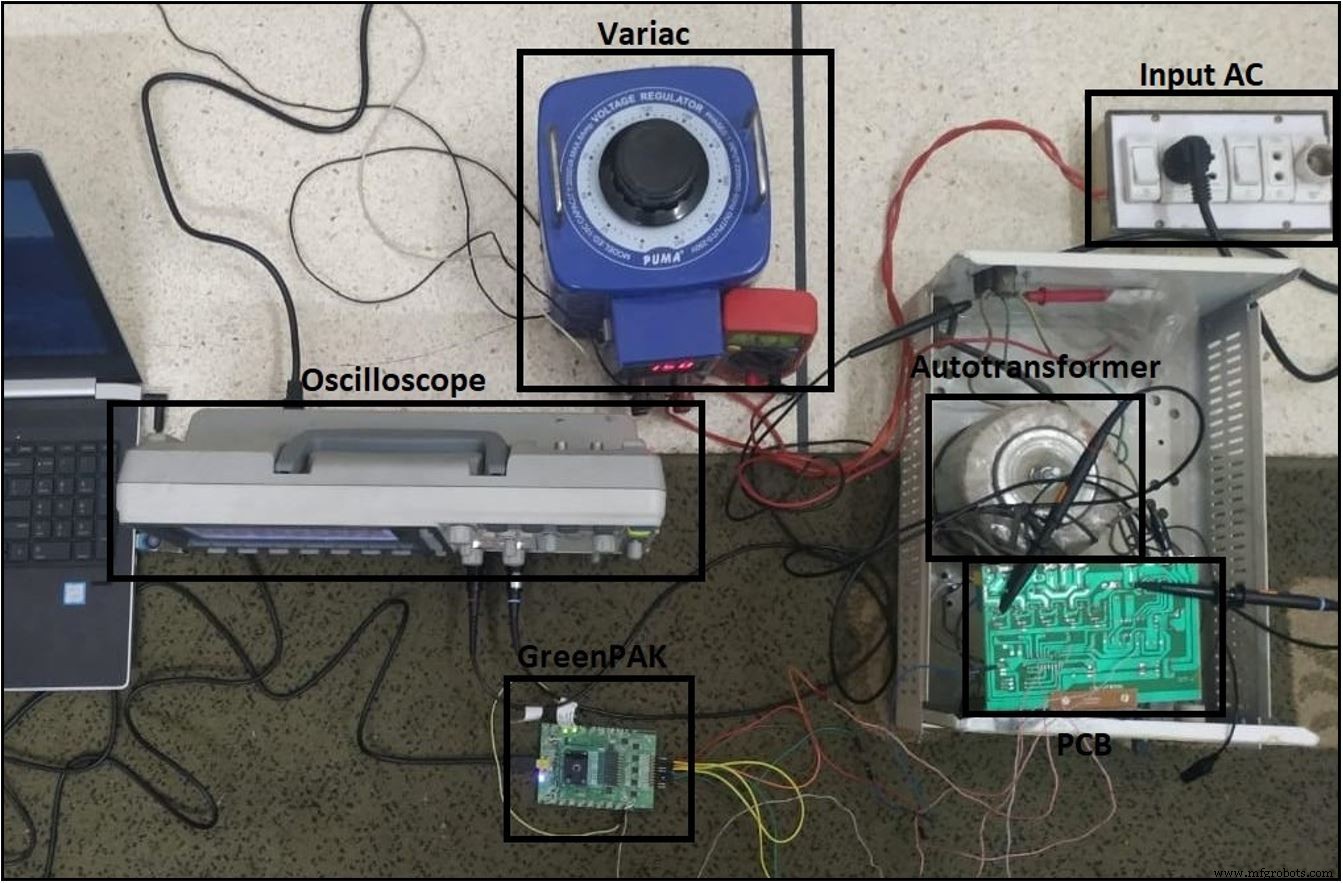
Figure 6 :Configuration expérimentale. (Source :BarqEE)
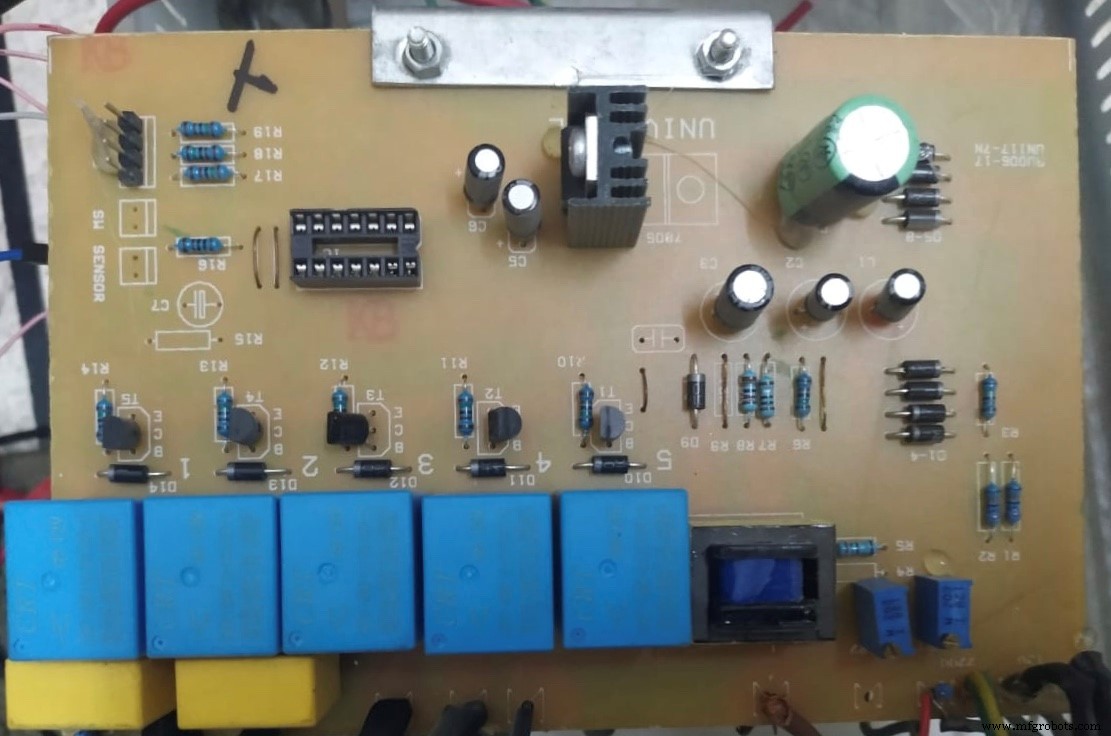
Figure 7 :Circuits PCB. (Source :BarqEE)
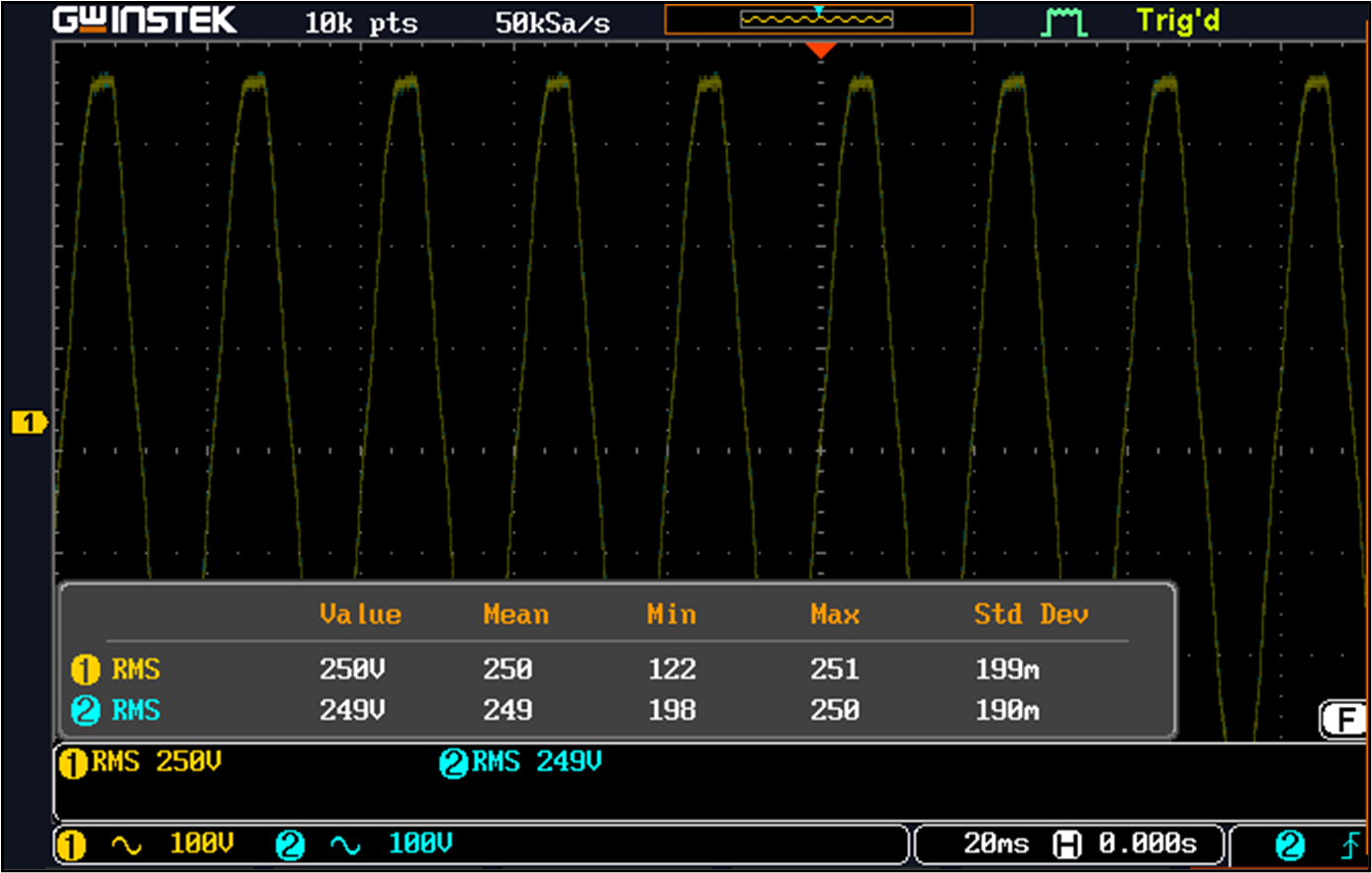
Figure 8 :Résumé expérimental quantitatif. (Source :BarqEE)
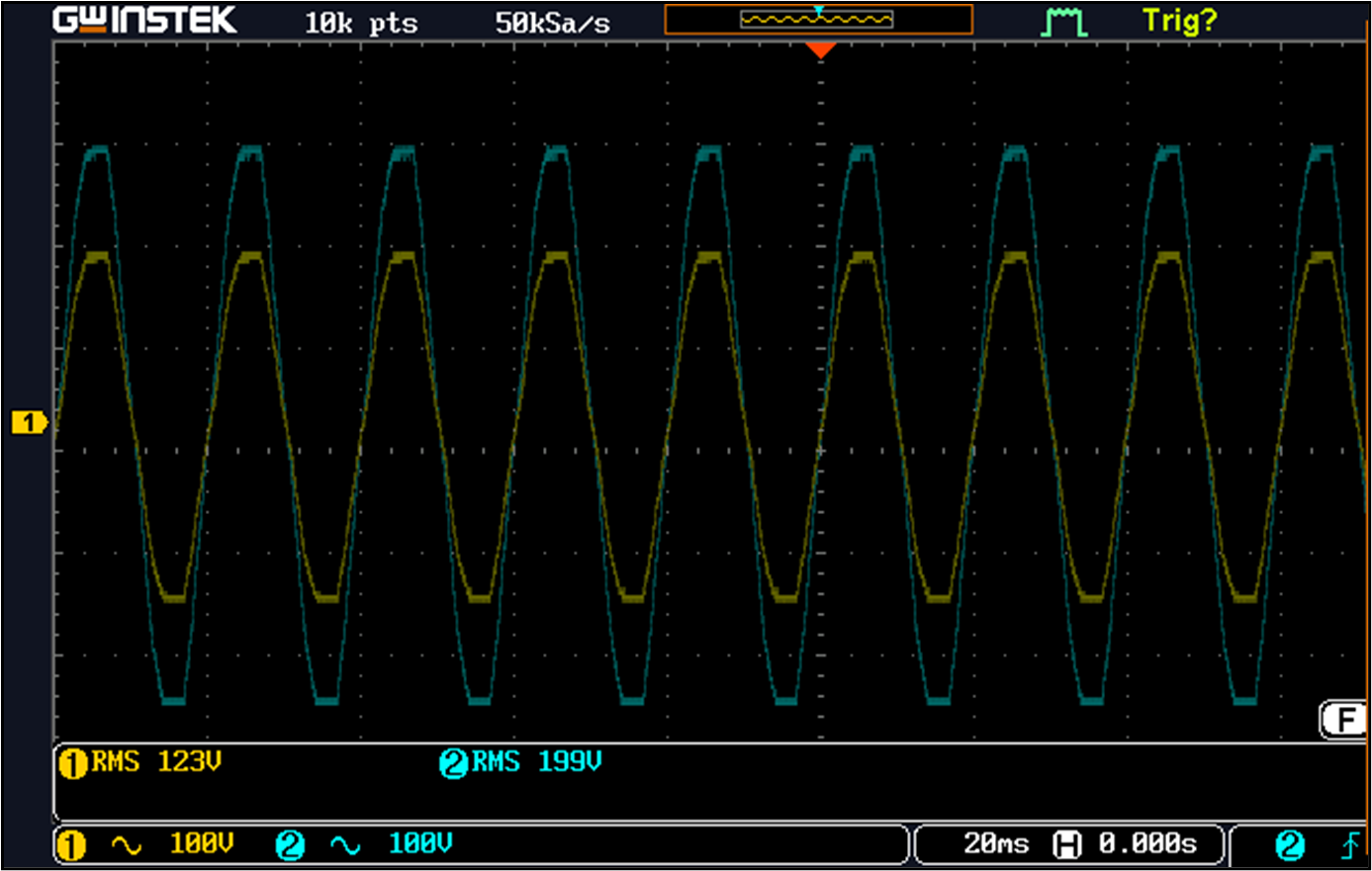
Figure 9 :Fonctionnalité normale. (Source :BarqEE)
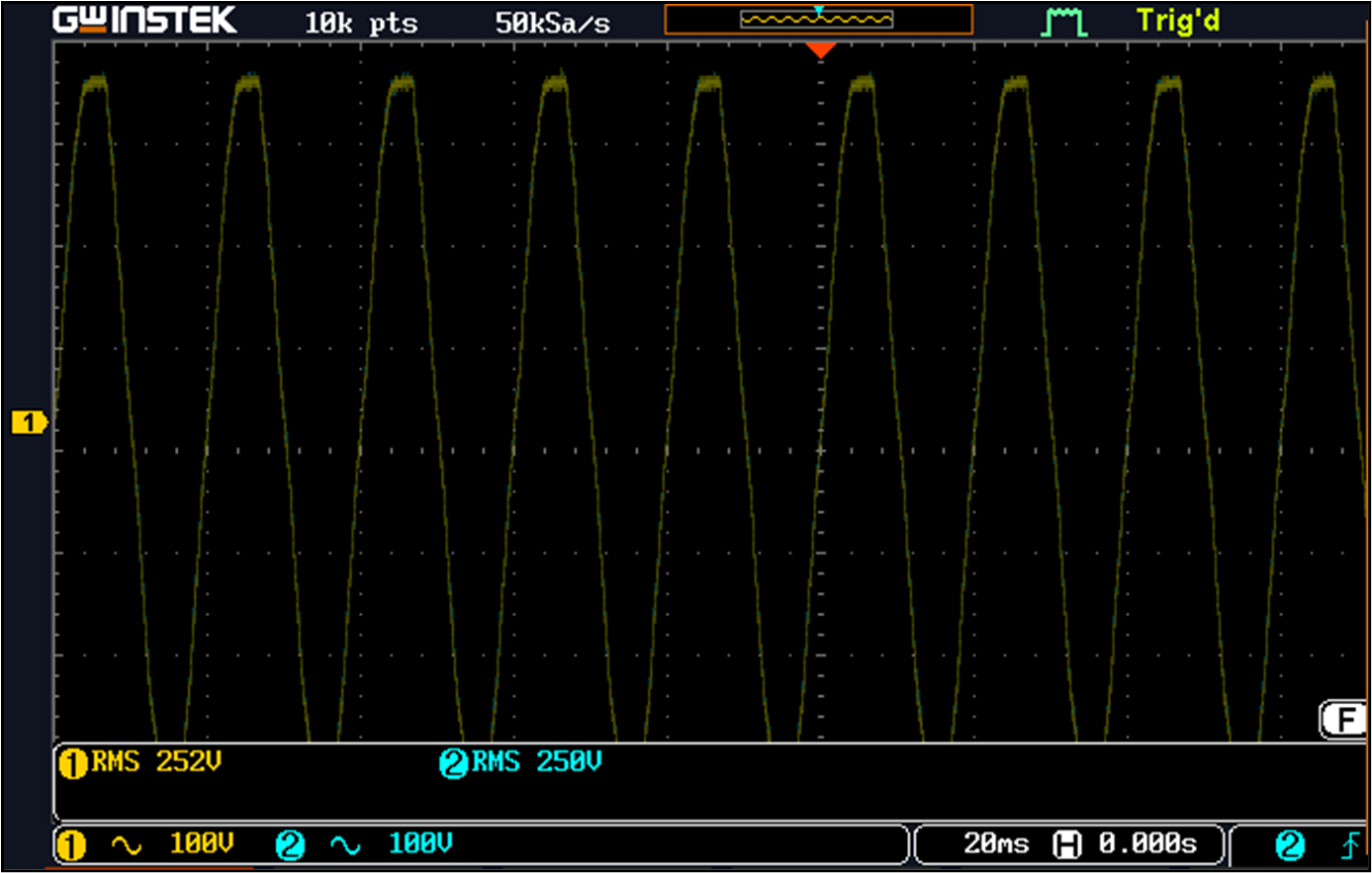
Figure 10 :approche de la surtension. (Source :BarqEE)
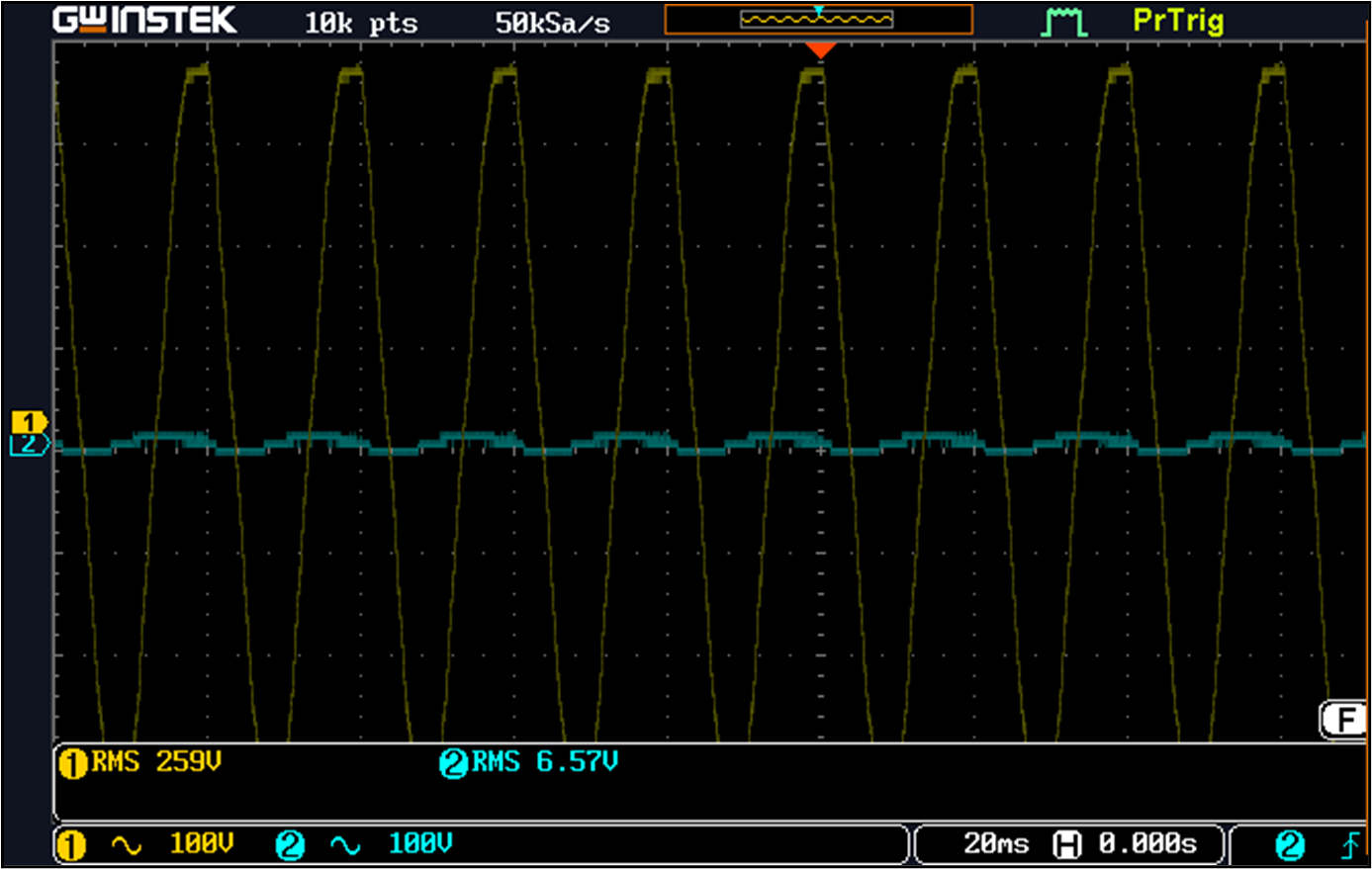
Figure 11 :Condition de surtension. (Source :BarqEE)
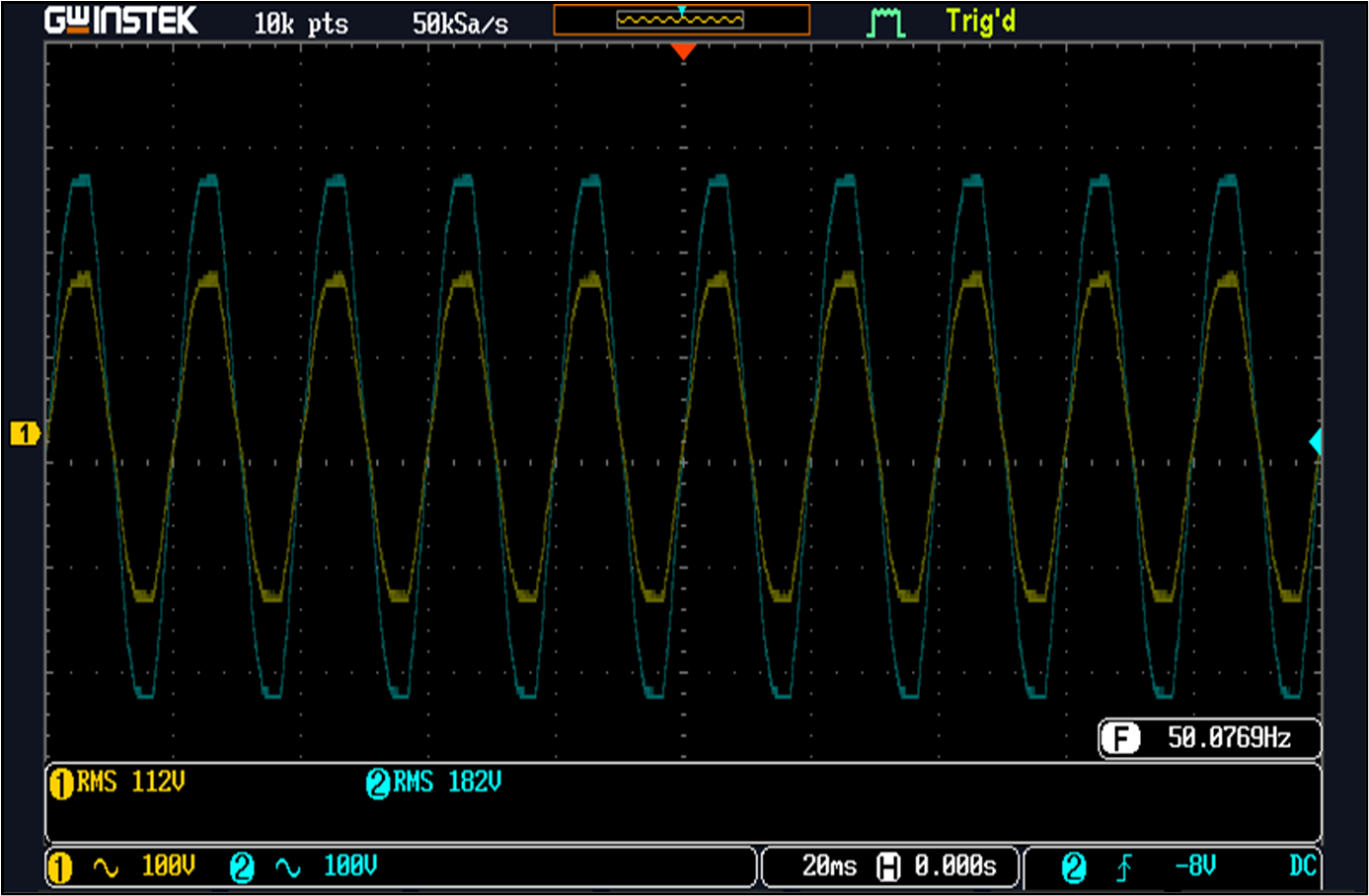
Figure 12 :Approche de la sous-tension. (Source :BarqEE)
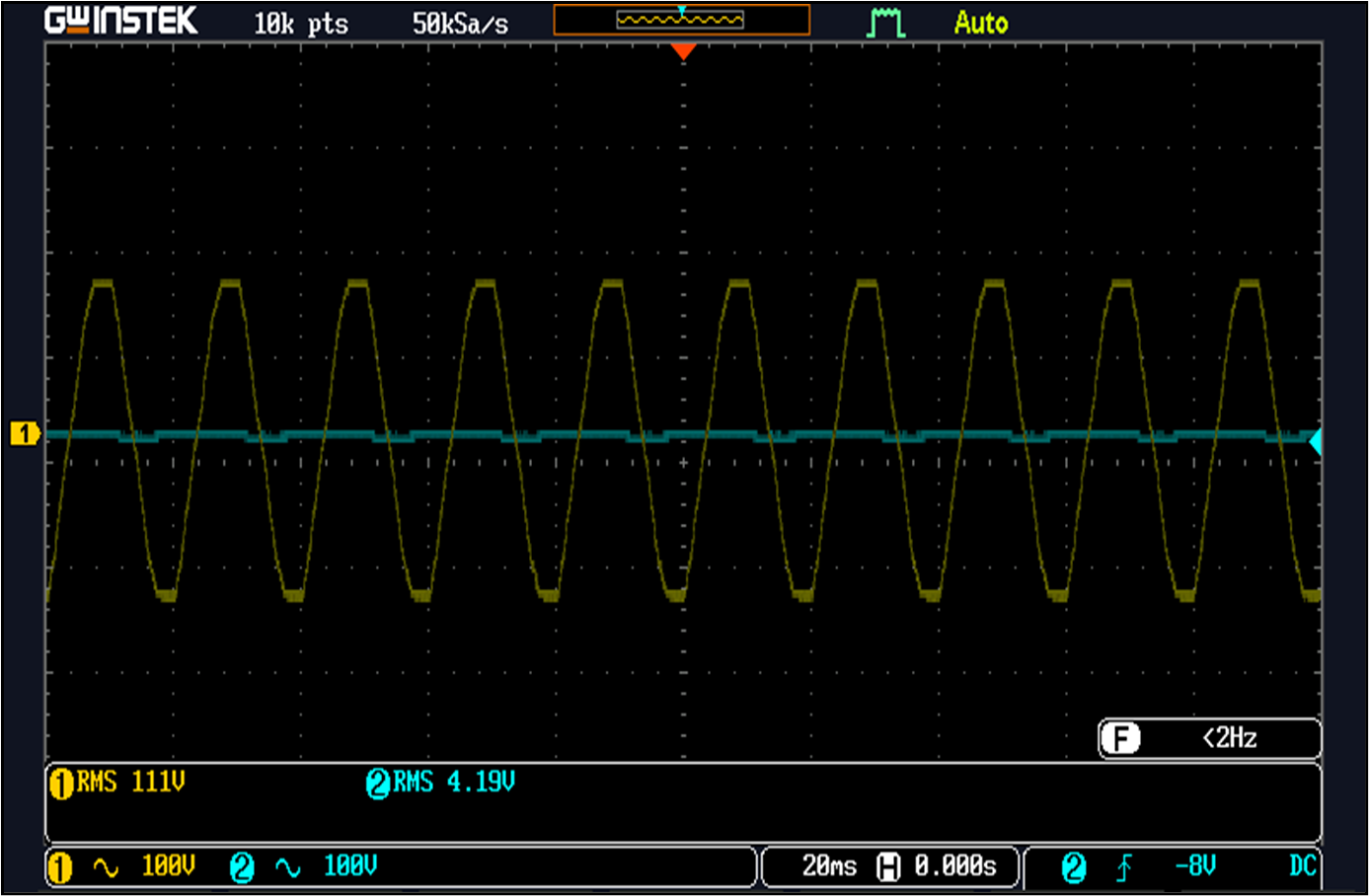
Figure 13 :Condition de sous-tension. (Source :BarqEE)
 Aamir Hussain Chughtai est actuellement candidat au doctorat. Génie électrique à LUMS, Lahore. Ses domaines de travail sont liés au traitement du signal, à l'apprentissage automatique et à l'IoT. Il est cofondateur de la startup informatique BarqEE basée à Lahore. Aamir peut être contacté à chughtaiah@barqee.com.
Aamir Hussain Chughtai est actuellement candidat au doctorat. Génie électrique à LUMS, Lahore. Ses domaines de travail sont liés au traitement du signal, à l'apprentissage automatique et à l'IoT. Il est cofondateur de la startup informatique BarqEE basée à Lahore. Aamir peut être contacté à chughtaiah@barqee.com.  Muhammad Saqib a obtenu le diplôme de maîtrise en génie électrique de NUCES, Lahore. Ses principaux domaines de travail comprennent l'électronique de puissance, les systèmes embarqués et l'instrumentation. Il est cofondateur de la startup informatique BarqEE basée à Lahore. M. Saqib peut être contacté à saqib.awan@barqee.com.
Muhammad Saqib a obtenu le diplôme de maîtrise en génie électrique de NUCES, Lahore. Ses principaux domaines de travail comprennent l'électronique de puissance, les systèmes embarqués et l'instrumentation. Il est cofondateur de la startup informatique BarqEE basée à Lahore. M. Saqib peut être contacté à saqib.awan@barqee.com.
Embarqué
- Besoin de développer un processus de normalisation des colorants
- L'effort multi-compétences pour la maintenance
- Changeurs d'outils automatiques pour robots
- Plus de jalons pour les plastiques EVCO
- Une approche moderne de la formation pour une main-d'œuvre moderne
- Fraises polygonales pour tours automatiques
- Usinage d'arbre à cames plus efficace
- Tour automatique CNC pour pièces de précision
- Des technologies pour une fabrication plus efficace de composants médicaux présentées à MD&M West 2018