


catapulte automatique pour lancer de la nourriture pour animaux, des balles et plus encore !
Composants et fournitures
 |
| × | 1 | |||
| × | 3 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 10 | |||
 |
| × | 2 | |||
 |
| × | 1 |
Applications et services en ligne
 |
|
À propos de ce projet
Bonjour et bienvenue dans mon premier projet !
Notre chien ADORE sa nourriture, elle la mangera littéralement en quelques secondes. J'ai imaginé des moyens de ralentir cela, des balles avec la nourriture à l'intérieur à la jeter partout dans la cour. Étonnamment, elle est maintenant comme un aspirateur et peut trouver et manger la nourriture à une vitesse impressionnante. Alors, revenons à la planche à dessin et j'ai imaginé cet appareil pour l'aider à ralentir et à profiter de sa nourriture :)
CONCEPT

Veuillez prendre quelques secondes pour profiter des 2 vidéos, elles expliquent beaucoup de choses.
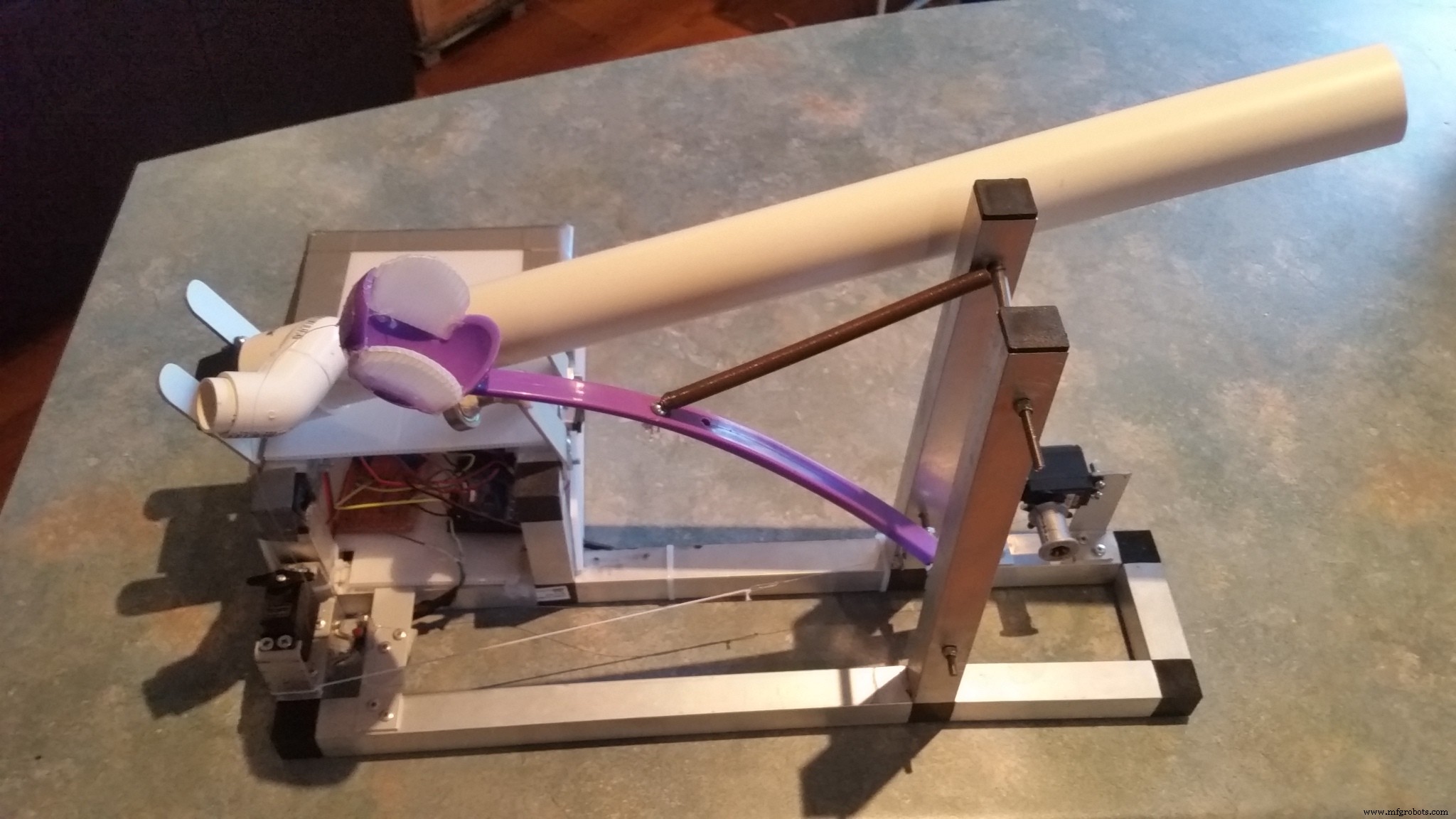
Mais, en termes simples, le concept de base est que le servo du Rotator tourne et abaisse le bras de la catapulte. Il le fait jusqu'à ce qu'il touche l'interrupteur de fin de course. Ensuite, le servo de déclenchement passe en position de maintien, ce qui maintient le bras de catapulte. Le servo du Rotator revient ensuite à sa position d'origine, prêt pour le prochain lancer.
Le servo de livraison de nourriture fait tourner le tuyau et distribue de la nourriture (ou d'autres choses) au conteneur/à la tête du bras de catapulte. Le servo de déclenchement tourne alors et laisse le ressort retirer le bras de la catapulte et jette la nourriture.
Lors des tests, cette configuration a catapulté des biscuits de nourriture pour chiens sur 10 mètres, avec des aliments roulants. Les réglages des servos et le changement du ressort modifieront complètement cela.
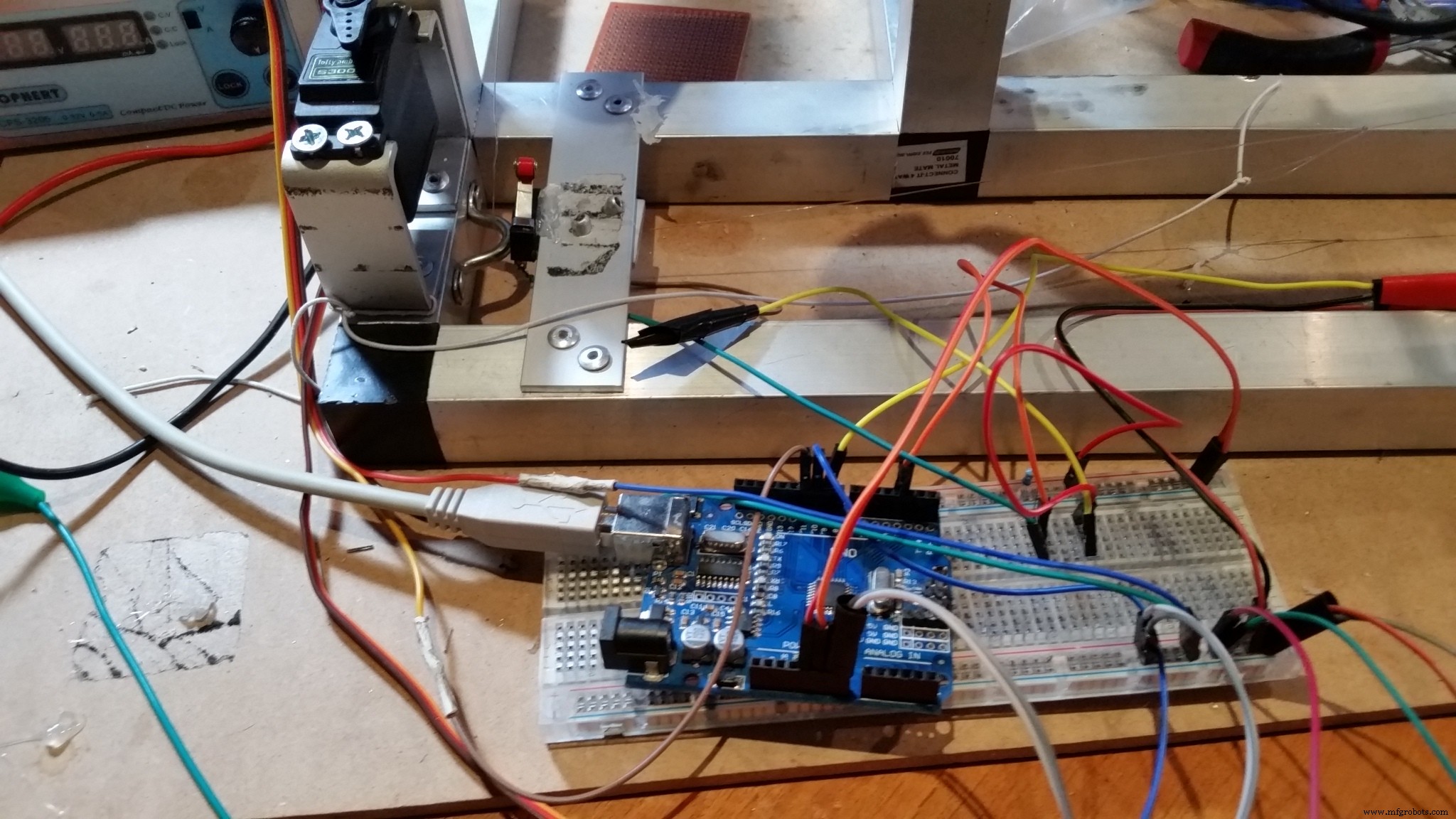
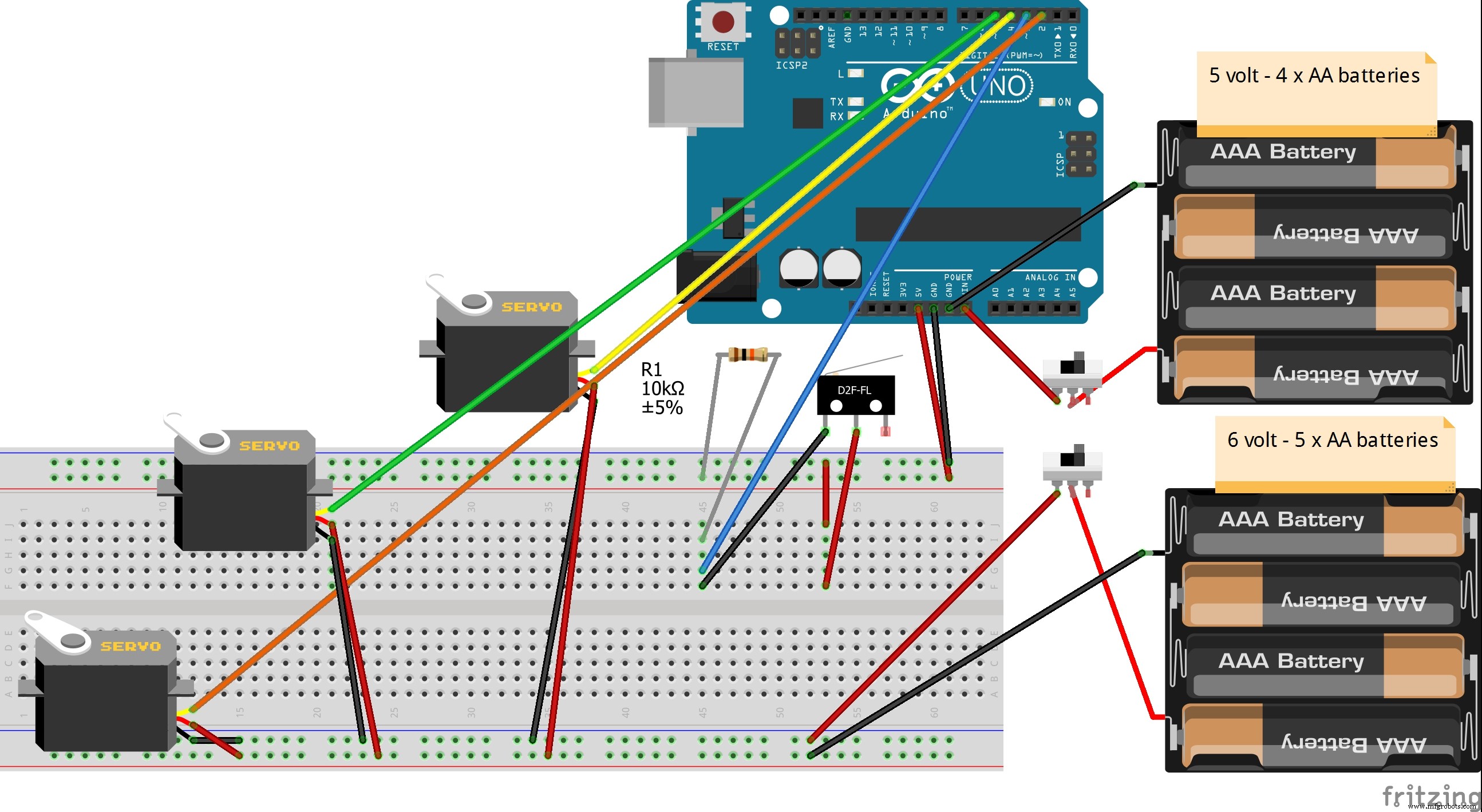
ÉLECTRONIQUE
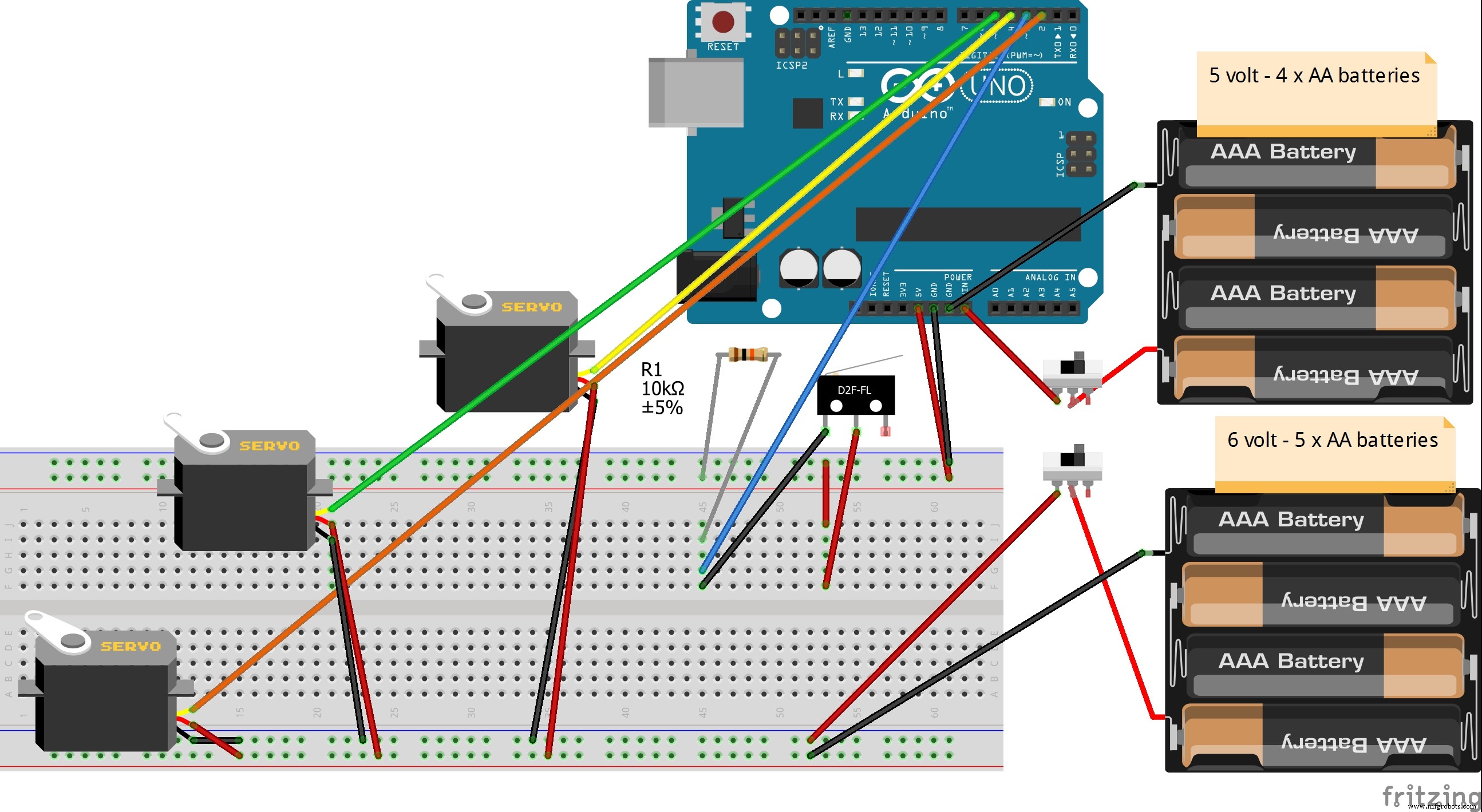
Je vais essayer d'être succinct tout au long de ce projet, pas seulement pour plus de simplicité, mais parce que cette catapulte peut être fabriquée de 100 manières différentes. Il peut être mis à l'échelle et vous pouvez créer diverses structures et utiliser divers matériaux. Outre l'électronique et les servos, le reste est complètement flexible avec ce que vous avez sous la main, ou à votre budget.
Je n'expliquerai pas étape par étape comment faire l'électronique, il y a plein de projets impressionnants là-dessus. Surtout parce que je suis un débutant, j'ai probablement fait des erreurs et vous feriez mieux d'apprendre des professionnels;)
MATÉRIAUX
- Arduino Uno R3 - n'importe quel Arduino fera le travail cependant
- 2 servos à 180 degrés
- 1 x servomoteur à rotation continue
- Fin de course
- Résistance 10k ohms
- 4 piles AA et étui
- 1 pile de lanterne de 6 volts - peut être (et je le ferai) remplacée par 5 piles AA câblées ensemble
- 2 interrupteurs - n'importe quel type fera l'affaire, même le plus simple
- Câbles de connexion - beaucoup d'entre eux;)
- Planche à pain - pour les tests
MATÉRIAUX - SI CRÉATION PERMANENTE
Carte Perf 2 connecteurs 2 broches - en option, vous pouvez câbler les boîtiers de batterie.
SERVOS
J'ai acheté quelques servos Lofty Ambition S3003 180 degrés bon marché sur eBay. Vous voudrez au moins quelque chose de ce grognement, n'essayez pas d'acheter moins, car ils seront incapables de supporter la charge. Mais ils n'ont pas besoin d'être chers de Jaycar (magasin d'électronique australien) ou similaire. Le servomoteur à rotation continue que j'ai utilisé est le FS5106R. Le modèle n'est pas important, mais vous aurez certainement besoin du servomoteur pour avoir au moins ces spécifications.
Si vous rendez la catapulte plus forte ou plus grande, assurez-vous d'avoir des servos plus gros pour correspondre.
STRUCTURE

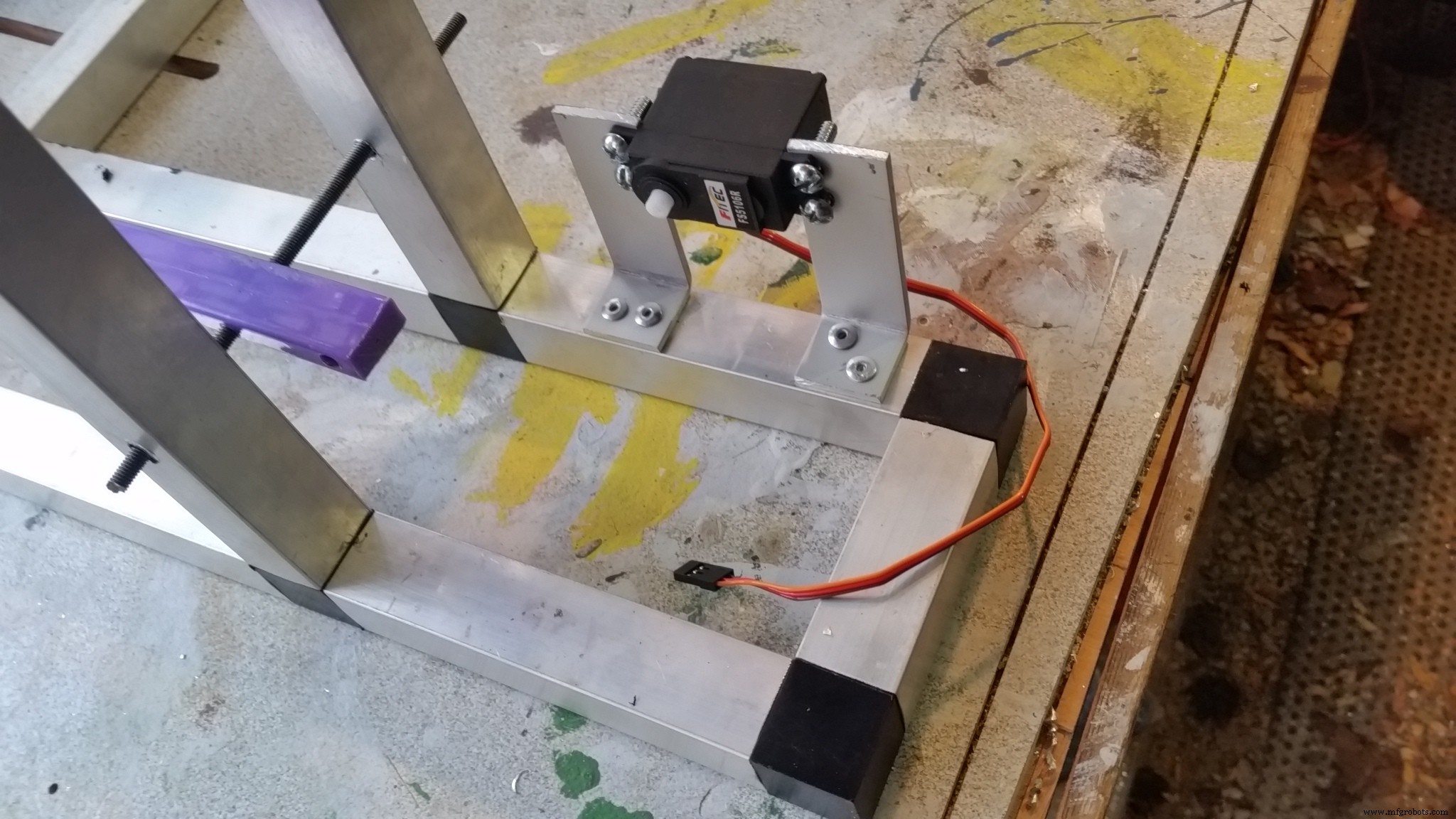


Comme indiqué précédemment, la structure dépend entièrement de vous. Vous pouvez le fabriquer en plastique, en bois ou en métal. La taille dépend également de vous. Si vous voulez pouvoir catapulter plus de nourriture (ou d'autres choses), faites-le plus petit ou plus gros. Donc, en raison de ces points, je n'entrerai pas dans les détails complets sur la façon dont j'ai fait ma structure. Je suis très heureux de fournir des réponses sur quoi que ce soit.
Je suis un GRAND fan de réutilisation/recyclage/upcycle/etc. Une grande partie de ce que j'ai utilisé, j'en avais dans mon hangar. J'ai fait la plupart de ma structure en aluminium que j'avais en raison d'un autre projet. La structure principale est constituée de tubes carrés en aluminium de 25 mm et de connecteurs en plastique "connect-it". Les supports pour les moteurs que j'ai fabriqués en aluminium de 25 mm de large x 3 mm.
Le concept de livraison de nourriture est issu de ce projet :
https://www.hackster.io/circuito-io-team/iot-pet-feeder-10a4f3 par https://www.hackster.io/circuito-io-team - un grand merci à eux !
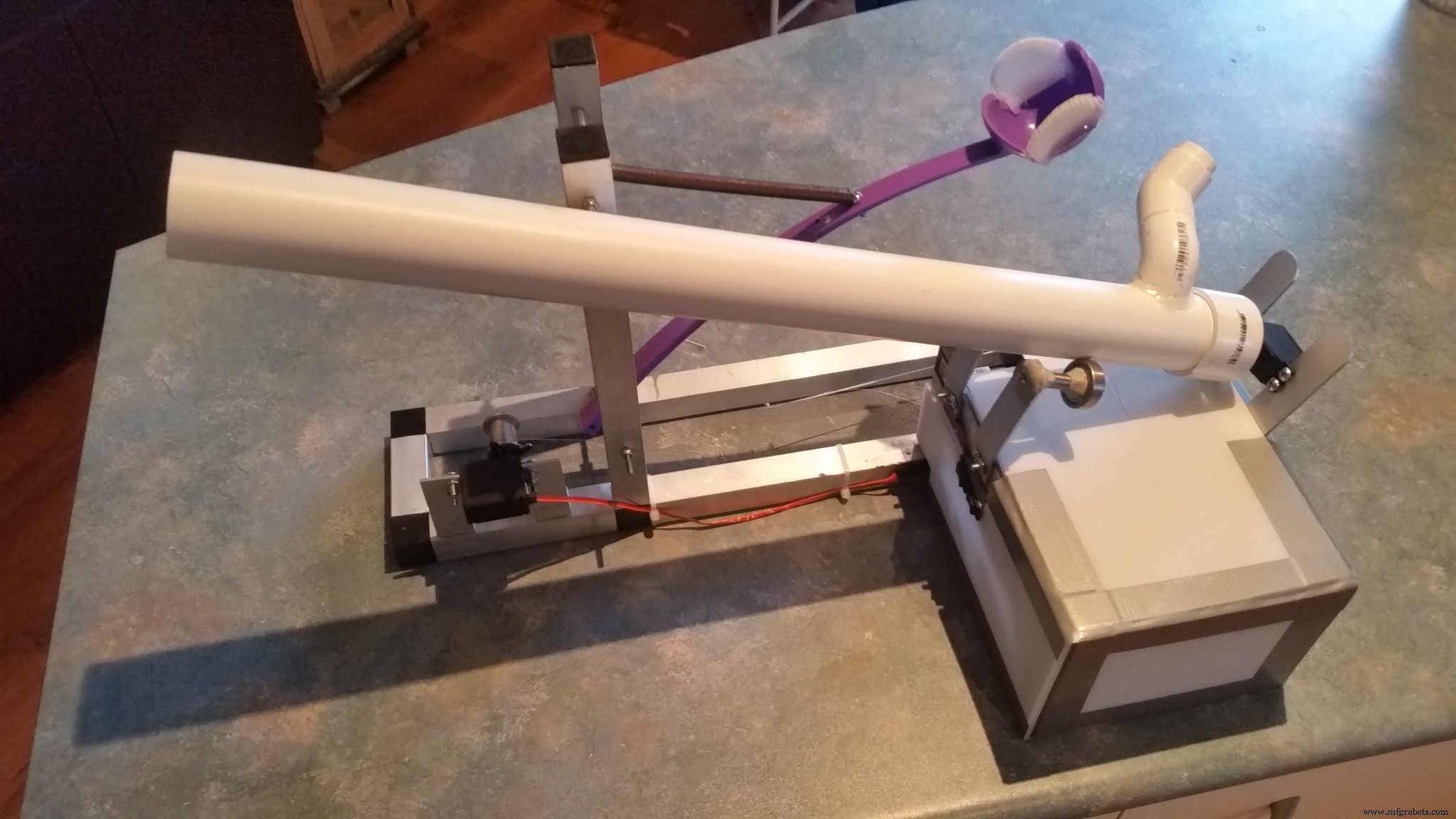
Le support que j'ai fabriqué est un tuyau en PVC de 40 mm de ma quincaillerie locale. Le bras réel est constitué de deux connecteurs plus petits à 45 degrés, connectés ensemble et collés à chaud dans le plus gros tuyau. Le tube en PVC plus grand a un autre connecteur à 45 degrés pour faciliter l'ajout de biscuits pour animaux de compagnie (ou d'autres choses). Tout est fait pour pouvoir être démonté, pour toutes modifications.
Le reste du bras de distribution de nourriture a été conçu pour permettre un mouvement circulaire facile - pour le rendre plus facile sur le servo. Il existe de meilleures façons (si vous avez les outils) de le faire, mais j'ai fait de mon mieux. J'ai fabriqué des supports, découpé des tiges de métal et utilisé un produit appelé "pétrir" pour attacher les tiges aux supports et aux roulements. Comme vous pouvez le voir sur les vidéos, le tuyau en PVC tourne en douceur sur les roulements et ceux-ci enlèvent une grande partie du poids (et du couple requis) du servo.
Le bras catapulte est un lanceur de balles de tennis d'un magasin pas cher à 2 $.
Le pouvoir de catapultage provient d'un vieux ressort que j'ai trouvé dans mon atelier - comme vous pouvez le voir sur la rouille. La taille, le type et la force du ressort sont cruciaux pour la force et l'efficacité de la catapulte. Vous devrez équilibrer la force du servo, la force du ressort, la flexibilité du bras de catapulte. Obtenir cet équilibre est délicat et dépend vraiment de ce que vous recherchez. J'ai opté pour un design qui laisse du mouvement dans le bras, ce qui crée une certaine imprévisibilité sur la destination des aliments. L'enceinte supérieure du bras de catapulte, qui contient les biscuits, contribue également à l'imprévisibilité. Plus de plaisir pour l'animal à trouver la nourriture.
Le bras de catapulte est abaissé via une ligne de pêche à travers une petite poignée en métal (ou mangeoire, selon votre utilisation), sous une plate-forme qui maintient le fin de course (plus de détails en seconde), le long de la structure, à travers un autre poignée en métal (pour l'empêcher de s'emmêler), puis fixée sur la broche (j'ai utilisé la chose en plastique qui contient du coton pour la broche sur le rotateur), qui est fixée au servo continu. De plus, j'ai utilisé un élastique fin et faible, attaché à la ligne de pêche et aux supports de déclenchement. Cela garantit que lorsque le Rotator se déroule, la ligne de pêche ne se coince nulle part.
J'ai utilisé ce noyau de tunnel - Feuille de plastique tout usage - Carte utilitaire à double paroi pour un moyen facile de créer le boîtier pour les batteries et l'électronique.
La structure est très solide, mais assez légère. La partie la plus lourde est la pile de la lanterne, qui sera bientôt remplacée par des piles rechargeables AA.
LEÇONS APPRISES ET MODIFICATIONS FUTURES
Comme pour tout ce que vous ne maîtrisez pas, il y a toujours des choses à apprendre en cours de route. Dans ce projet, eh bien, disons simplement que vous vous ennuieriez avec ma liste avant d'arriver à la fin;)
L'un des plus gros problèmes est le colmatage des aliments. Ce bras de livraison de nourriture vient d'un projet, mais malheureusement, je n'arrive pas à le trouver. Il ne livre sporadiquement pas de biscuits, mais c'est une bonne chose, cela laisse l'animal deviner ! Mais, en général, cela fonctionne très bien.
J'ai construit la structure en aluminium parce que notre chien n'est pas doux, il doit donc lui tenir tête. Heureusement, jusqu'à présent, il se porte bien.
Je vais améliorer le bras catapulte, le rendant un peu plus sexy. La plupart des éléments importants peuvent être décomposés pour permettre l'accès. par exemple. livraison de nourriture, boîtier électronique.
Dans l'ensemble, un projet très amusant et notre chien adore ça ! Je suis très heureux de fournir des réponses ou des conseils sur quoi que ce soit.
Merci beaucoup à Hackster et à vous d'avoir lu sur la catapulte automatique.
Code
- Catapule automatique - Code Arduino
Catapule automatique - code ArduinoArduino
/* * Lanceur automatique de nourriture pour animaux par Nathan King juin 2018 */#includeint FoodDeliveryReleasePosition =115;int FoodDeliveryHoldPosition =0;int TriggerReleasePosition =90;int TriggerHoldPosition =0;int limit_switch =3;int switch_state =0;Servo fooddelivery ; // créer un objet servo pour contrôler le déclencheur armServo de livraison de nourriture ; // crée un objet servo pour contrôler le rotateur triggerServo ; // crée un objet servo pour contrôler le rotatorvoid setup() { rotater.attach(2); // attache le servo rotateur trigger.attach(4); // attache le servo de déclenchement fooddelivery.attach(5); // attache le servo de livraison de nourriture pinMode (limit_switch, INPUT); Serial.begin(9600);}boucle vide() { rotater.write(89); // empêche le servo du rotateur de bouger - inutile si vous avez un bon servo;) delay(500); // Positions de départ fooddelivery.write(FoodDeliveryHoldPosition); retard(1000); trigger.write(TriggerHoldPosition); retard(1000); trigger.write(TriggerReleasePosition); delay(1000); // boucle de fin de course pour arrêter le servo du rotateur switch_state =digitalRead(limit_switch); Serial.println(switch_state); while (switch_state ==HIGH) { switch_state =digitalRead(limit_switch); Serial.println("L'interrupteur est éteint"); rotateur.write(75); // démarre le Rotator dans le sens des aiguilles d'une montre à la vitesse xx (0-255) } Serial.println("Switch is on"); rotateur.write(89); // arrête le servo du rotateur// maintient le bras de catapulte sur la gâchette et réinitialise le rotateur à la position de départ trigger.write(TriggerHoldPosition); retard(1000); rotateur.write(110); retard (4500); rotateur.write(89); retard (2000); // Livraison de nourriture pour catapulter fooddelivery.write(FoodDeliveryReleasePosition); retard (500); fooddelivery.write(FoodDeliveryReleasePosition); // attend que la nourriture tombe delay(1000); fooddelivery.write(FoodDeliveryHoldPosition); delay(150);// Ceci permet d'ajouter un délai entre la livraison de nourriture et le déclenchement du rotateur.write(89); retard(1000); // Lâche la catapulte !! trigger.write(TriggerReleasePosition); retard (3000); // retard pour que l'animal trouve la nourriture - modifiez ceci pour changer la rapidité avec laquelle la nourriture est livrée :)}
Schémas
Processus de fabrication
- Conception hygiénique pour les industries agroalimentaires et de transformation
- Conseils de sélection des contrôleurs et enregistreurs pour les applications alimentaires et boissons
- Maîtres de couleur acétal pour l'automobile et plus basés sur des transporteurs à faibles émissions
- B&R dévoile un ordinateur "haut de gamme" pour les véhicules agricoles et de construction autonomes
- Conseils pour l'usinage CNC du titane :Aéronautique et plus
- Poupée coulissante automatique pour tournage suisse et de production
- Conseils pour l'application de lubrifiant pour métal :éviter le surgraissage et plus encore
- Invar :les tendances de l'entreposage intelligent pour 2021 et au-delà
- Distributeurs automatiques de nourriture – Polyvalence des produits