


Contrôle PID d'un robot préhenseur dans Matlab / Simulink
Dans ce didacticiel, nous verrons comment effectuer le contrôle PID du modèle 3D d'un mécanisme de préhension de robot. Le modèle Simulink est organisé en deux sous-systèmes. Un sous-système de moteur à courant continu modélisé à l'aide de blocs Simulink et un modèle 3D importé de Solidworks à l'aide de SimMechanics Link. Nous utilisons une fonction pas à pas pour activer le moteur à courant continu afin d'entraîner le robot préhenseur et nous utilisons le bloc Simulink PID pour régler automatiquement les paramètres du PID.
Vous pouvez regarder la vidéo suivante ou lire le didacticiel écrit ci-dessous.
Téléchargez le modèle Simulink à partir de l'exemple ici :
Trouvez et téléchargez le modèle 3D du mécanisme de préhension du robot sur le lien suivant : 
Modèle Simulink - Contrôle PID
1 fichier(s) 538,71 Ko Téléchargement 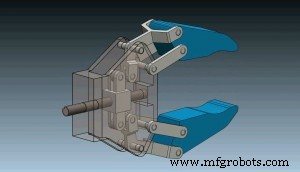
Processus de fabrication
- L'avenir de la robotique
- pilule contraceptive
- Train miniature
- Robot industriel
- Tutoriel – sPiRobot :Contrôlez et voyez ce que votre robot voit de n'importe où
- Robot de tri de recyclage avec Google Coral
- Principes de base du contrôle PID et du réglage de boucle
- Contrôle PID d'un robot préhenseur dans Matlab / Simulink
- Simulation Solidworks et Matlab / Simulink