


360 Radar (qui encode les données sur une image)
Composants et fournitures
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 2 | |||
 |
| × | 1 |
Outils et machines nécessaires
| ||||
 |
|
Applications et services en ligne
 |
| |||
| |
|
À propos de ce projet
Je suis là et je vais vous montrer comment faire un 360 Radar. Envoyez les données à l'ordinateur, et après les avoir traitées, dessinez le radar en temps réel et après une révolution (360 tours) enregistrez le radar précédent et dessinez le nouveau. et après tout cela, ENCODEZ les données et les cachez dans une image. Par exemple si vous envoyez uniquement les données d'encodage et que quelqu'un a observé ce transfert de données, il découvrira que vous avez transféré des données ENCODÉES . Mais, si vous cachez les données codées dans une image, il ne saura jamais ce que vous avez fait et pensera simplement que vous avez envoyé une photo pour quelqu'un d'autre.
Étape 1 (Rassemblez ce dont vous avez besoin)
Dans ce projet, vous aurez besoin de :
- Arduino (j'ai utilisé Uno R3)
- Servomoteur (nous en avons besoin de 2 car nous devrions avoir 360 degrés de mouvement disponibles)
- Capteur à ultrasons (nous utilisons celui-ci pour calculer la distance)
- Câbles pour que vous puissiez attacher le capteur à ultrasons et le servo.
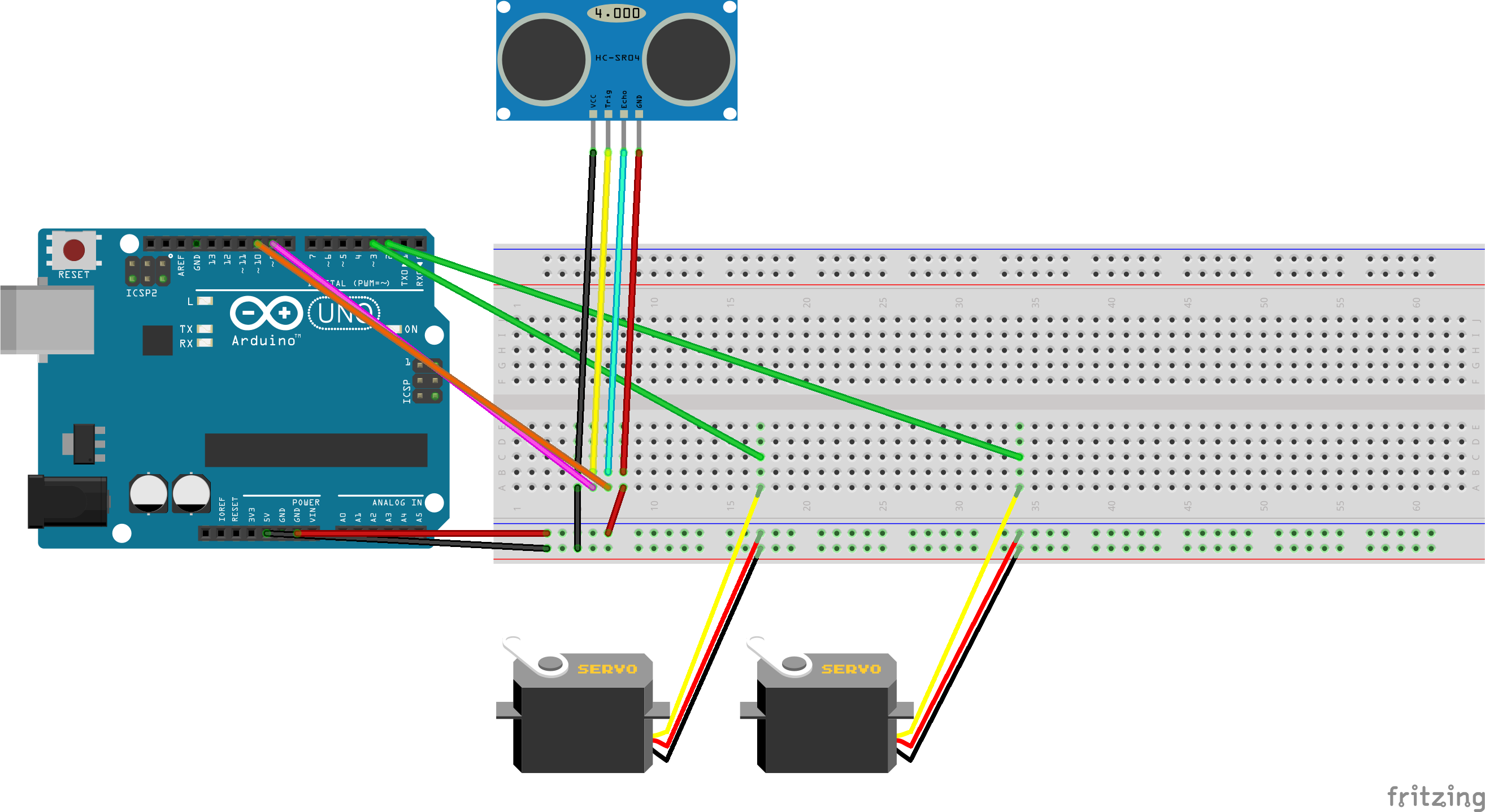
Étape 2 (les assembler)
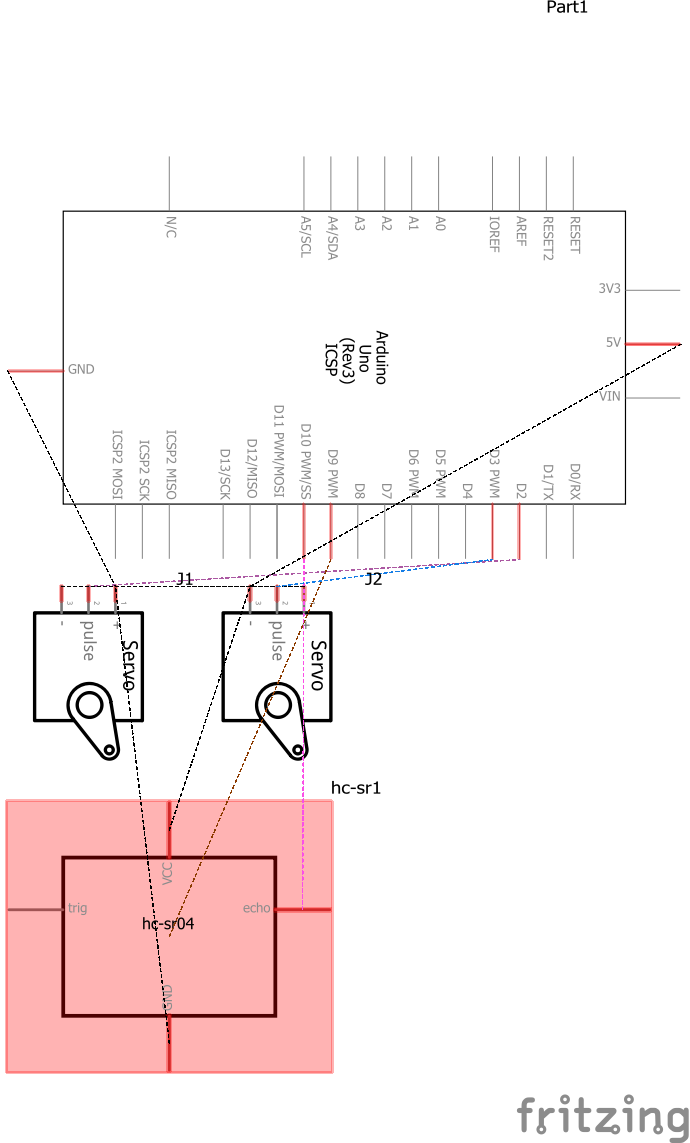
Connectez le servo et le capteur à ultrasons à l'Arduino comme dans le schéma ci-dessous (juste au-dessus du code C++). Vous pouvez télécharger le code et les voir sur l'ordinateur.
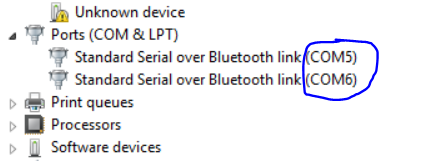
Attention :Si vous ne savez pas quel est le nom du port, allez dans le Gestionnaire de périphériques puis recherchez Ports. vous pouvez y voir le nom (COM3 ou COM5).
Si vous avez terminé le projet, demandez-moi simplement d'envoyer l'EXE de Radar Drawer.
*Mise à jour* :Téléchargez le fichier EXE sur cette page.
Si vous rencontrez des problèmes avec l'utilisation d'EXE ou si vous souhaitez créer votre propre EXE, demandez-moi simplement et je suis là pour vous aider.
Lorsque vous importez une photo pour encoder l'IA, choisissez la meilleure méthode pour la rendre plus sûre.
Code
- Servocommande
ServocommandeC/C++
Ce code sur C++ est pour contrôler le servo et doit être téléchargé sur Arduino#includeServo Down;Servo Up;const int trigPin =9;const int echoPin =10;long duration;int pos =0;int pos2 =0;int distance;int _degrees;void setup() {pinMode(trigPin, OUTPUT);pinMode(echoPin, INPUT); Attacher.bas(2); Up.attach(3);Serial.begin(9600); }boucle vide() { Down.write(0); Up.write(0); for (pos =0; pos <=180; pos +=1) { Down.write(pos); _degrés =pos; dis(); retard (50); if (pos ==180){ for (pos2 =0; pos2 <=180; pos2 +=1) { Up.write(pos2); _degrés =pos + pos2 ; dis(); retard (50); } } } pour (pos =180; pos>=0; pos -=1) { Down.write(pos); Up.write(pos); retard (5) ; }}void dis(){ digitalWrite(trigPin, LOW);delayMicroseconds(2);digitalWrite(trigPin, HIGH);delayMicroseconds(10);digitalWrite(trigPin, LOW);duration =pulseIn(echoPin, HIGH);distance=durée *0.034/2;Serial.print(distance);Serial.print(",");Serial.println(_degrees); }
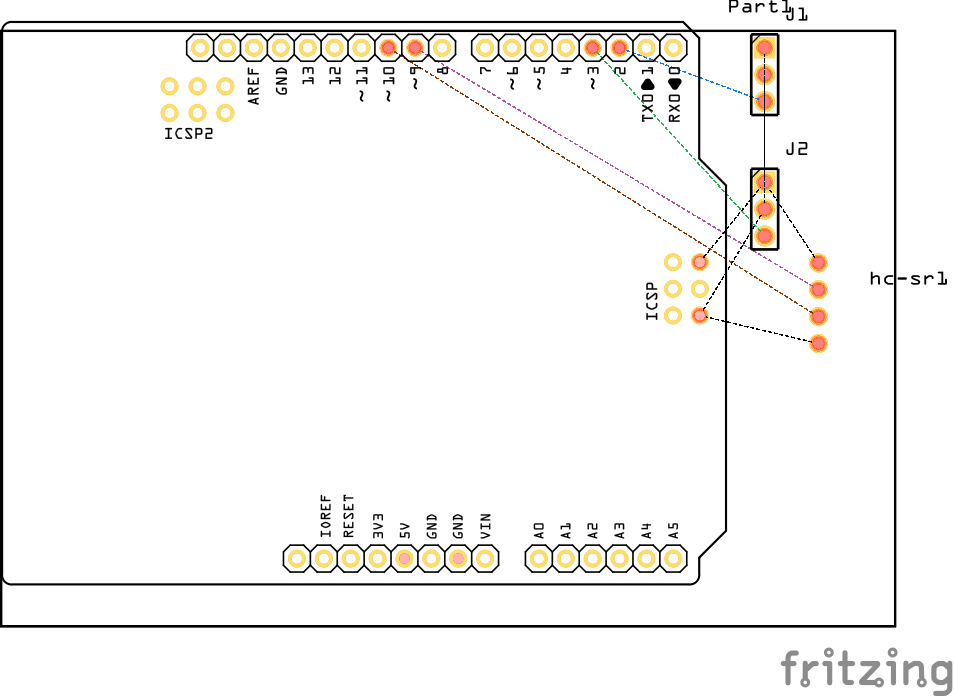
Pièces et boîtiers personnalisés
Téléchargez le fichier EXE ici circulaire_draw_qP2ROsoPds.rarSchémas
Processus de fabrication