


Contrôlez le robot sans fil grâce aux commandes Bluetooth Rapport de thèse | Projet de bricolage
Un robot est défini comme une conception mécanique capable d'effectuer des tâches humaines ou de se comporter de manière humaine. Construire un robot nécessite une expertise et une programmation complexe. Il s'agit de construire des systèmes et d'assembler des moteurs, des capteurs sonar et des câbles, entre autres composants importants | Projet de fin d'études pour les étudiants en électronique et communication eng | Génie électrique.
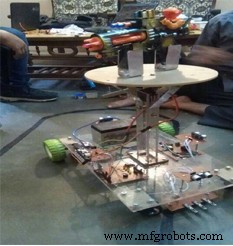 Cet article traite de la conception et de la construction d'un robot capable de détecter l'ennemi. Ce robot implémente les concepts suivants :détection de l'environnement, contrôle moteur proportionnel. Ce robot traite les informations de ses différents capteurs et éléments matériels clés via un microcontrôleur (Arduino mega). Il utilise des capteurs sonar pour détecter l'accident d'incendie. Un robot capable de détecter l'ennemi et de lui tirer dessus. Des capteurs sonar seront utilisés pour la détection initiale. Une fois l'ennemi détecté, le robot allume automatiquement son buzzer en quelques secondes, le robot s'active et commence à tirer vers l'ennemi. Le projet contribue à générer des intérêts ainsi que des innovations dans les domaines de la robotique tout en travaillant vers une solution pratique et accessible pour sauver des vies et atténuer les risques de dommages matériels.
Cet article traite de la conception et de la construction d'un robot capable de détecter l'ennemi. Ce robot implémente les concepts suivants :détection de l'environnement, contrôle moteur proportionnel. Ce robot traite les informations de ses différents capteurs et éléments matériels clés via un microcontrôleur (Arduino mega). Il utilise des capteurs sonar pour détecter l'accident d'incendie. Un robot capable de détecter l'ennemi et de lui tirer dessus. Des capteurs sonar seront utilisés pour la détection initiale. Une fois l'ennemi détecté, le robot allume automatiquement son buzzer en quelques secondes, le robot s'active et commence à tirer vers l'ennemi. Le projet contribue à générer des intérêts ainsi que des innovations dans les domaines de la robotique tout en travaillant vers une solution pratique et accessible pour sauver des vies et atténuer les risques de dommages matériels. 1.1 Aperçu
Le projet comprend une hiérarchie contrôlée sans fil du robot car il est contrôlé par les commandes de l'appareil Bluetooth qui contrôle le mouvement du robot. Le robot est complètement télécommandé et offre une vue complète de la zone à contrôler.1.2 Buts et objectifs :
L'objectif principal du projet est d'assurer la sécurité de la zone qui ne peut pas être contrôlée par les forces armées. Par conséquent, ce robot peut entrer dans ces endroits en raison de sa taille et de sa facilité de contrôle.Objectifs : • Fournir une application de surveillance et de contrôle à distance pour l'analyse. • Permettre à l'utilisateur de manipuler l'ennemi à l'aide du bras robotique. • Pour fournir un retour visuel pour le lieu sous sécurité. • Fournir une application de contrôle très conviviale. 1.3 Énoncé de portée du système :Le robot utilise une application de contrôle, côté utilisateur pour contrôler le robot à distance à l'aide de la technologie sans fil. L'entrée de l'utilisateur est transmise en série sur un appareil Bluetooth au robot, où elle est reçue, identifiée et relayée vers le module approprié.· L'entrée dans le système provient de l'utilisateur pour le mouvement du robot. · Cette entrée est d'abord traitée par l'application de contrôle, transmise en série via une liaison Bluetooth. Cette entrée est ensuite reçue par le robot et traitée à nouveau. · La sortie du système est le signal traité vers le module approprié. Ce module peut être un moteur de la base du robot.
Principales entrées et sorties :
· Signaux d'entrée · Mouvement du bras robotique · Mouvement du robot. Nous l'avons conçu comme un robot assistant pour l'équipe de sécurité, mais il existe un certain nombre d'autres applications de ce robot. Il peut être utilisé par : • Police :dans les prises d'otages • Militaire :pour les missions de reconnaissance • Bases aériennes :elles seront utilisées pour la manipulation de matières dangereuses ou radioactives.1.4 Bases théoriques et organisation
La thèse se compose de cinq chapitres. Une brève explication est présentée ici : Chapitre 1 :IntroductionCe chapitre traite de la question relative au contexte des objectifs de la thèse et de la structure de la recherche
. Chapitre 2 :Revue de la littérature Ce chapitre traite principalement du périphérique Bluetooth. Une partie de la littérature concernant ce sujet de thèse est également incluse dans ce chapitre. Chapitre 3 :Outils et techniques Ce chapitre traite de tous les outils et logiciels utilisés pour la réalisation du projet Chapitre 4 :Méthodologies Le chapitre 4 se concentrera principalement sur la mise en œuvre de la procédure, de la méthode et de la théorie grâce à la conception par simulation du robot de détection d'ennemi proposé lié au sujet de la thèse. Chapitre 5 :Résultat et analyseLe robot est pratiquement testé et vérifié. Les tests incluent l'efficacité du système de détection du robot de conception et ses performances.
Chapitre 6 :Conclusion Enfin, une conclusion sur les résultats obtenus est présentée. Cela inclut également les nouveautés dans le travail et des suggestions pour les travaux futurs.Nous espérons que cet article aidera les étudiants universitaires qui font un baccalauréat ou une maîtrise en ingénierie électronique et communication .Veuillez nous contacter pour un rapport de thèse complet
Technologie industrielle
- L'avenir de la robotique
- Robot Raspberry Pi contrôlé par Bluetooth
- Comment réussir l'intégration de votre premier robot
- Contrôler les appareils électroménagers via le Web ou le mobile
- Arduino avec Bluetooth pour contrôler une LED !
- Arme de robot contrôlée via Ethernet
- Robot suiveur de ligne de contrôle PID
- Survivre à un projet de migration du système de contrôle
- Contrôle PID d'un robot préhenseur dans Matlab / Simulink