


Un régulateur de tension transitoire amélioré avec une stabilité et un renforcement du rejet de l'alimentation
Résumé
Un régulateur de tension (VR) à haute stabilité est proposé dans cet article, qui intègre l'amélioration des transitoires et la protection contre les surintensités (OCP). Compte tenu des avantages en termes de performances et de surface des dispositifs basse tension, la plupart des éléments de commande du VR proposé sont alimentés par la tension de sortie régulée, qui forme la technique d'auto-alimentation (SPT) avec amplification de la réjection de l'alimentation (PSR). En outre, la stabilité et la réponse transitoire sont améliorées par la technique de charge dynamique (DLT). Une boucle de rétroaction de surintensité intégrée est également adoptée pour protéger le VR présenté contre les dommages en cas de surcharge. Le VR proposé est implémenté dans une technologie BCD standard de 350 nm, dont les résultats indiquent que le VR peut fonctionner de manière constante avec une tension d'entrée de 5,5 à 30 V, une plage de charge de 0 à 30 mA et un condensateur de sortie de 0,1 à 3,3 μF. Une régulation de ligne de 2,98 μV/V et une régulation de charge de 0,233 mV/mA sont obtenues avec une limitation de courant de 40 mA. Le PSR est meilleur que − 64 dB jusqu'à 10 MHz avec un condensateur de sortie de 0,1 μF.
Introduction
Dans les conceptions modernes de systèmes sur puce (SoC) à l'échelle nanométrique, différents sous-blocs nécessitent généralement des rails d'alimentation différents pour réaliser certaines fonctions spécifiques. En outre, l'ensemble du système SoC peut avoir besoin de fonctionner sous une large plage de tension d'entrée tout en offrant des performances élevées non affectées par le changement des conditions d'alimentation [1]. Ainsi, un régulateur de tension (VR) à large plage de tension d'entrée mis en œuvre dans une technologie à l'échelle nanométrique peut être l'un des candidats les plus appropriés pour ce type d'applications. Comparé à son homologue de commutation, tel que le régulateur de commutation et la pompe de charge, le VR linéaire présente l'avantage d'une haute précision, d'un faible bruit de sortie et d'une taille compacte. La plupart des VR linéaires remplissent leur fonction de régulation de tension avec une seule alimentation en tension, mais seuls quelques-uns peuvent combiner une large plage d'alimentation, un faible bruit, des transitoires rapides, une capacité de charge élevée et des fonctions de protection supplémentaires [2,3,4] .
Pour réaliser une large plage d'alimentation, l'utilisation de transistors pouvant supporter une pression à haute tension est nécessaire. Cependant, ce type de transistors occupe généralement plus de surface et a de moins bonnes performances par rapport aux transistors standard. Deux des solutions existantes pour réduire l'utilisation de transistors haute tension sont la méthode du prérégulateur [5, 6] et la méthode des transistors basse tension empilés [7, 8]. Le premier utilise un prérégulateur supplémentaire pour fournir une tension d'alimentation interne au régulateur de base. Ce dernier met en œuvre des transistors basse tension empilés bien conçus pour maintenir les tensions aux bornes des transistors dans les limites de la technologie [7]. Cependant, ces méthodes limitent la marge de tension. Cet article adopte la technique d'auto-alimentation (SPT) pour obtenir une large plage d'alimentation, ce qui signifie que la plupart des modules de base de la boucle de régulation sont alimentés par la tension de sortie régulée du VR proposé [9]. Sans aucun circuit supplémentaire, les performances de VR peuvent être améliorées par SPT et également réduire le nombre d'appareils haute tension.
En utilisant SPT, le premier étage de gain de l'amplificateur d'erreur (EA) est alimenté par la tension de sortie régulée du VR proposé. En concevant soigneusement le deuxième étage de l'EA, le bruit haute fréquence de la tension d'entrée a peu d'impact sur la tension de sortie de l'EA. De plus, l'architecture des transistors de puissance de type N est adoptée dans cet article. Par conséquent, le régulateur proposé a une réjection d'alimentation élevée (PSR) et de bonnes performances de bruit [10,11,12,13,14,15].
La réponse transitoire rapide est également un indice important pour mesurer les performances des VR [16,17,18,19,20], ce qui est généralement obtenu en ajoutant une boucle d'accélération supplémentaire [21]. Dans cet article, l'amélioration transitoire est réalisée par la technique de charge dynamique (DLT). Au cours de la procédure de réponse transitoire, le DLT introduit un courant supplémentaire modifié en fonction des conditions de charge pour agir comme une charge dynamique, par laquelle le dépassement et le sous-dépassement de la tension de sortie régulée peuvent être supprimés [9].
Avec l'aide du DLT, la stabilité de la boucle dans une large plage de charge est renforcée car le courant de charge supplémentaire peut réduire la variation de la position polaire non dominante. Pour rendre la boucle stable, la compensation Miller avec résistance d'annulation est également utilisée pour générer un pôle basse fréquence et un zéro supplémentaire pour compenser le pôle de sortie. De plus, une résistance série avec le condensateur de sortie introduit un autre zéro pour compenser le pôle généré par la capacité parasite de grille du transistor de puissance [6, 9, 22, 23].
Enfin, une boucle de limitation de courant intégrée est conçue pour éviter les dommages dus aux surintensités et améliorer la fiabilité du VR proposé [9, 24, 25, 26, 27].
Ce document est structuré comme suit. Le principe et le mécanisme de la VR proposée sont illustrés dans la section « Méthode », y compris le circuit de protection contre les surintensités (OCP), le circuit DLT et d'amélioration des transitoires, la méthode d'amplification de la stabilité et l'analyse PSR. Les résultats de performance et les comparaisons avec d'autres publications connexes sont présentés dans la section « Résultats et discussion ». La section « Conclusion » tire la conclusion de la RV proposée.
Méthode
Le circuit détaillé du VR proposé est illustré à la Fig. 1. Les transistors MOS basse tension standard, les transistors haute tension, les BJT, les transistors LDMOS à appauvrissement de type N (MOS à diffusion latérale) et les diodes sont nommés Mn , HVn , Qn , DNn , et Dn , respectivement dans la figure, où n est le numéro de séquence de l'appareil concerné.

Le circuit détaillé du VR proposé
Le VR proposé comprend principalement cinq sous-modules :courant de polarisation, OCP, DLT, EA et étage de sortie. Le circuit de polarisation de courant fournit un courant de polarisation pour l'ensemble du système de régulateur [12, 14]. La tension de référence peut être générée de différentes manières [1], et le circuit détaillé n'est pas représenté ici. Une boucle de limitation de courant intégrée fonctionne comme un circuit OCP pour limiter le courant de charge à une valeur prédéfinie. Le circuit d'amélioration des transitoires, qui est mis en œuvre par le DLT, réalise le dépassement et la suppression du sous-dépassement en modifiant de manière adaptative le courant de charge pendant la procédure transitoire. La boucle de régulation à contre-réaction est formée par EA et l'étage de puissance de sortie pour ajuster la tension de sortie. En supposant que la tension de sortie V SORTIE et donc la tension de retour V FB était inférieure à la valeur souhaitée, la tension de grille du transistor de puissance DN1 serait tirée à l'aide de la boucle de régulation pour augmenter la tension de sortie, et vice versa. Enfin, la tension de sortie peut se stabiliser à
$$ {V}_{\mathrm{OUT}}\approx {V}_1={V}_{\mathrm{REF}}\left({R}_{\mathrm{f}1}+{R} _{\mathrm{f}2}\right)/{R}_{\mathrm{f}2} $$ (1)Sur la figure 1, on peut remarquer que la tension de sortie du VR proposé alimente également le premier étage de gain de EA, nommé SPT. Avec cette technique de multiplexage de puissance, la plupart des dispositifs de la boucle de régulation peuvent être mis en œuvre par des dispositifs basse tension. Par rapport à leurs homologues haute tension, les dispositifs basse tension ont des performances plus élevées, un coût inférieur et une surface plus petite, ce qui permet à la boucle de régulation proposée d'atteindre une bonne capacité de régulation beaucoup plus facilement. Quant au deuxième étage de EA, Q3 et Q4 sont ajoutés pour soulever le rail d'alimentation au sol, qui est adopté pour limiter la tension drain-source de M7, VDS_M7 . En d'autres termes, Q3 et Q4 peuvent empêcher M7 d'une pression de tension élevée.
Par souci de simplicité, le circuit simplifié est utilisé pour illustrer les idées d'innovation dans l'analyse ultérieure.
Circuit OCP proposé
La figure 2 montre le circuit OCP proposé. La boucle de limitation de courant proposée peut changer automatiquement de mode de fonctionnement en fonction des différentes conditions de charge. Le courant maximum du VR proposé peut être limité en réduisant la tension de grille du transistor de puissance en cas de surcharge.

Principe de l'OCP proposé
Le mécanisme de l'OCP proposé est le suivant. Le transistor d'échantillonnage DN2 détecte proportionnellement le courant traversant DN1 qui est approximativement égal au courant de charge I Charger , ce qui fait chuter la tension aux bornes de R S1 , V RS1 , reflètent le niveau de courant de charge. Une fois V RS1 atteint la tension d'activation de QS1, HV8 et HV9 formera un miroir de courant pour contourner un courant du deuxième étage de EA. Ensuite, la tension de grille de DN1 peut être abaissée pour limiter le courant de charge à une valeur prédéfinie, qui peut être exprimée sous la forme
$$ {I}_{\mathrm{Load}}\le N\times \left({V}_{EB\left(\mathrm{QS}1\right)}/{R}_{S1}\right ) $$ (2)où N est le rapport de facteur de taille de DN1 à DN2. Le but de Q5 et HV6 est de fournir une tension de polarisation appropriée à HV7 et ainsi de protéger QS1 des conditions de surtension.
Il y a une boucle de rétroaction négative intégrée dans l'OCP proposé. Le gain de boucle T et le pôle dominant p dominante de cette boucle de limite de courant peut être donnée par,
$$ T={g}_{m\_\mathrm{DN}2}{R}_{S1}{g}_{m\_\mathrm{QS}1}{R}_{\mathrm{porte }\_\mathrm{OC}} $$ (3) $$ {p}_{\mathrm{dominant}}=1/\gauche({R}_{\mathrm{gate}\_\mathrm{OC} }{C}_{\mathrm{gate}}\right) $$ (4)où g m_DN2 et g m_QS1 sont la transconductance de DN2 et QS1, respectivement. R gate_OC (g m_HV10 r o_HV10 r o_M10 ) || r o_M7 || r o_HV9 et C porte C gs_DN1 sont la résistance et la capacité de sortie équivalentes au nœud de grille du transistor de puissance DN1 lorsqu'une surintensité se produit, respectivement. Lorsque le VR proposé fonctionne normalement sans surintensité, HV9 est dans la région de coupure, et donc, la résistance de sortie équivalente au nœud de porte de DN1 nommé R porte peut être exprimé comme [(g m_HV10 r o_HV10 r o_M10 ) || r o_M7 ].
Proposition de DLT et de circuit d'amélioration des transitoires
La figure 3 montre le circuit d'amélioration transitoire utilisant le DLT. Étant donné que le courant de charge est proportionnel à Vgs_DN1 et inversement proportionnel à Vsg_M9, le courant traversant M9 est plus important dans des conditions de charge légère et est proche de zéro dans des conditions de charge élevée. Par conséquent, à mesure que le courant de charge augmente, un courant réduit peut être introduit dans la charge de sortie totale. Par cette méthode, ce circuit peut être égalisé à une charge dynamique, ce qui peut être utile à la fois pour l'amélioration des transitoires et l'amélioration de la stabilité de la boucle de régulation.

Le circuit d'amélioration des transitoires proposé
Le principe de fonctionnement détaillé de l'amélioration des transitoires est le suivant. Si le courant de charge subit une diminution soudaine, le courant circulant dans le transistor de puissance DN1 ne changera pas immédiatement en raison de la capacité de réglage de la boucle limitée et de la vitesse de balayage. Ce courant, représenté sur la figure 4a sous la forme d'un chemin jaune, provoquera un dépassement de la tension de sortie et augmentera ainsi la chute de tension aux bornes de R S2 et M9. Puis un courant supplémentaire circulant dans R S2 et M9, représenté sur la figure 4a comme un chemin bleu, est généré à la sortie régulée pour annuler le courant de chemin jaune indésirable. Par conséquent, le pic de tension de sortie est réduit efficacement.

Réponse transitoire de la VR proposée. un changement de courant de charge lourde à légère. b changement de courant de charge légère à lourde
La figure 4b illustre le cas d'un changement de courant de charge légère à lourde, où un sous-dépassement se produit à la sortie régulée, puis le courant circulant à travers R S2 et M9 diminue. Cela peut être équivalent à fournir une charge de courant réduite, de sorte que le courant net circulant à travers le transistor de puissance DN1 est augmenté, et la suppression de tension inférieure peut être obtenue.
Pour protéger M9 contre les surintensités, QS2 et D1 sont ajoutés. Lorsque la tension aux bornes de R S2 est supérieure à la tension d'activation de QS2, le courant supplémentaire s'écoulera dans QS2 et D1. Le courant maximum dans M9 est fixé à
$$ {I}_{\mathrm{M}9\_\max}\le \left({V}_{BE\_ QS2}/{R}_{S2}\right) $$ (5)Le but de D1 est d'empêcher QS2 de tomber dans la région d'amplification inversée et d'y faire circuler un courant inversé, ce qui est un état anormal de la fonction de limitation de courant M9.
Amélioration de la stabilité de la VR proposée
Comme le montre la figure 5, il y a trois pôles ω p1 , ω p2 , et ω p3 , et deux zéros ω z1 et ω z2 dans la boucle de contrôle, et le gain de boucle du VR proposé est
$$ {A}_{\mathrm{Vloop}}={A}_O\beta $$ (6)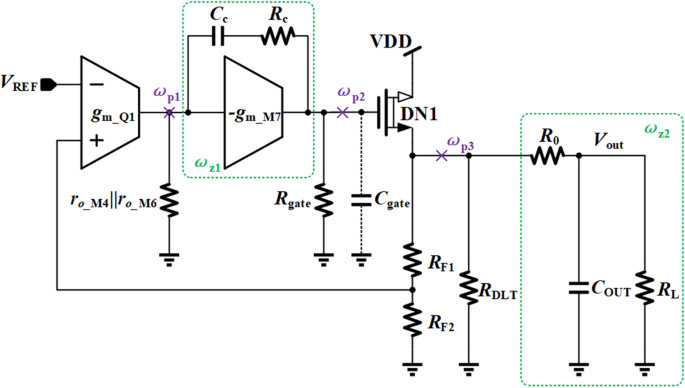
Répartition des pôles et des zéros de la VR proposée
où A O est le gain en boucle ouverte du VR, et β est le coefficient de rétroaction,
$$ {A}_O={A}_{\mathrm{CD}0}{A}_{E0}\frac{\left(1+s/{\omega}_{Z1}\right)\left( 1+s/{\omega}_{Z2}\right)}{\left(1+s/{\omega}_{P1}\right)\left(1+s/{\omega}_{P3} \right)\left(1+s/{\omega}_{P2}\right)} $$ (7) $$ \beta =\frac{R_{\mathrm{F}2}}{R_{\mathrm {F}1}+{R}_{\mathrm{F}2}} $$ (8)où A CD0 ≈ 1 est le gain basse fréquence de l'étage de puissance qui fonctionne comme un suiveur de tension et A E0 est le gain en basse fréquence de l'EA,
$$ {A}_{E0}={g}_{m\_Q1}\left({r}_{o\_M4}\Big\Vert {r}_{o\_M6}\right){g} _{m\_M7}{R}_{\mathrm{porte}} $$ (9)Compte tenu de l'effet Miller et de la capacité parasite au nœud de grille de DN1, les pôles et les zéros sont écrits [13]
$$ {\omega}_{p1}=1/\left[{g}_{m\_M7}{R}_{\mathrm{gate}}{C}_c\times \left({r}_{ o\_M4}\Big\Vert {r}_{o\_M6}\right)\right] $$ (10) $$ {\omega}_{p2}={g}_{m\_M7}/{ C}_{\mathrm{gate}} $$ (11) $$ {\omega}_{p3}=1/\left\{\left[{R}_L\Big\Vert \left({g}_ {m\_\mathrm{DN}1}^{-1}\Big\Vert {R}_{\mathrm{DLT}}+{R}_0\right)\right]{C}_{\mathrm{ OUT}}\right\} $$ (12) $$ {\omega}_{z1}=1/\left[{C}_c\left({R}_c-1/{g}_{m\_M7 }\right)\right] $$ (13) $$ {\omega}_{z2}=1/\left[\left({R}_0\Big\Vert {R}_L\right){C}_ {\mathrm{OUT}}\right] $$ (14)où R DLT est la résistance équivalente du circuit d'amélioration transitoire ; C SORTIE est le condensateur de sortie du VR proposé.
Puisque le condensateur de compensation C C est agrandi de (g m_M7 R porte ) en raison de l'effet meunier au nœud p1, le pôle ω p1 est le pôle dominant. Le deuxième pôle doit être ω p3 , parce que C SORTIE est généralement de l'ordre de plusieurs microfarads. Bien que le condensateur parasite C porte est relativement grande, elle est toujours inférieure à la fois à la capacité équivalente au nœud p1 et au condensateur de sortie. De plus, la résistance au nœud p2 n'est que de 1/g m_M7 . Par conséquent, le pôle ω p2 est situé à haute fréquence. Le zéro ω z1 est d'annuler le pôle de fréquence moyenne ω p3 . La résistance R 0 génère un zéro ω z2 pour compenser le pôle parasite interne ω p2 . La stabilité du VR proposé peut être améliorée en tant que résistance R 0 en augmentant. Cependant, la résistance R 0 augmentera l'erreur de la tension de sortie en raison de la chute de tension causée par le courant de charge. Par conséquent, la résistance R 0 doit être réglé sur une valeur raisonnable pour faire un bon compromis entre la précision de la tension de sortie et la stabilité de la boucle.
Dans un régulateur de tension conventionnel sans DLT, le pôle au nœud de sortie sera à une fréquence différente en raison de la variation de la transconductance du transistor de puissance induite par le courant de charge. À mesure que le courant de charge augmente, la transconductance du transistor de puissance g m _DN1 augmentera, et ainsi le pôle de sortie se déplacera vers la haute fréquence tandis que les autres zéros et pôles se maintiendront à la même position, comme illustré à la Fig. 6a. Cela peut rendre la compensation de fréquence du système plus difficile et ralentir la réponse transitoire dans des conditions de faible charge. Plus sérieusement, le système peut être instable.

Réponse en fréquence du régulateur de tension. un Régulateur de tension sans technique de charge dynamique. b Le régulateur de tension proposé avec technique de charge dynamique
Avec l'aide du DLT proposé, le VR présenté a une meilleure stabilité avec différentes charges. Comme analysé précédemment, le courant traversant le circuit de charge dynamique diminue à mesure que le courant de charge augmente en régime permanent et vice versa. Étant donné que ce courant est fourni par DN1, il peut supprimer les variations de transconductance de DN1 dans une plage de courant de charge plus large, ce qui est utile pour la stabilité du système et la constance de la bande passante pendant une plage de charge plus large en utilisant le DLT proposé. La réponse en fréquence du VR proposé est illustrée à la figure 6b, ce qui peut garantir la stabilité avec une réponse transitoire rapide.
Le condensateur de sortie définit la position du zéro ω z2 . En plaçant le pôle zéro de manière raisonnable, le système aura une meilleure stabilité avec différents C SORTIE .
Analyse PSR de la VR proposée
Le PSR est l'un des paramètres critiques pour mesurer les performances des régulateurs de tension, et il fait référence à la capacité de rejet contre les ondulations à haute fréquence et le bruit résultant de la tension d'alimentation. La méthode d'analyse PSR proposée par Gupta 12 est adoptée dans cette section, dont l'idée principale est de simplifier l'ensemble du système de régulateur dans un modèle de diviseur de tension. Comme le montre la figure 7, il y a deux chemins de bruit de V jj à V sortie :le chemin 1 transfère directement le bruit du drain du transistor de puissance DN1 vers V sortie; le chemin 2 va du deuxième étage de EA à la grille du transistor de puissance DN1. L'effet du chemin 2 peut être exprimé comme
$$ {A}_{\mathrm{chemin}2}\environ \frac{r_{o\_M7}}{g_{m\_\mathrm{HV}10}{r}_{o\_\mathrm{ HV}10}{r}_{o\_M10}} $$ (15)
Analyse PSR de la VR proposée
Comme indiqué dans (15), A chemin2 est un assez petit avec l'aide de la structure de miroir actuelle SPT et cascode proposée. Cela rend l'influence du chemin 1 dominante dans l'analyse PSR.
Le modèle PSR simplifié de la VR proposée est illustré à la Fig. 8, où r o_DN1 est la résistance de sortie du transistor de puissance DN1 représentant le chemin de bruit 1, la source de courant commandé provient du chemin de bruit 2, Z B se compose de R F1 , R F2 , R 0 , et C SORTIE agissant comme un filtre à haute fréquence, et Z SH_FB est l'impédance équivalente, y compris la fonction de boucle de rétroaction négative. Z SH_FB peut être donné par
$$ {Z}_{SH\_ FB}=\frac{1}{g_{m\_ DN1}\left(1+\beta {A}_E\right)} $$ (16)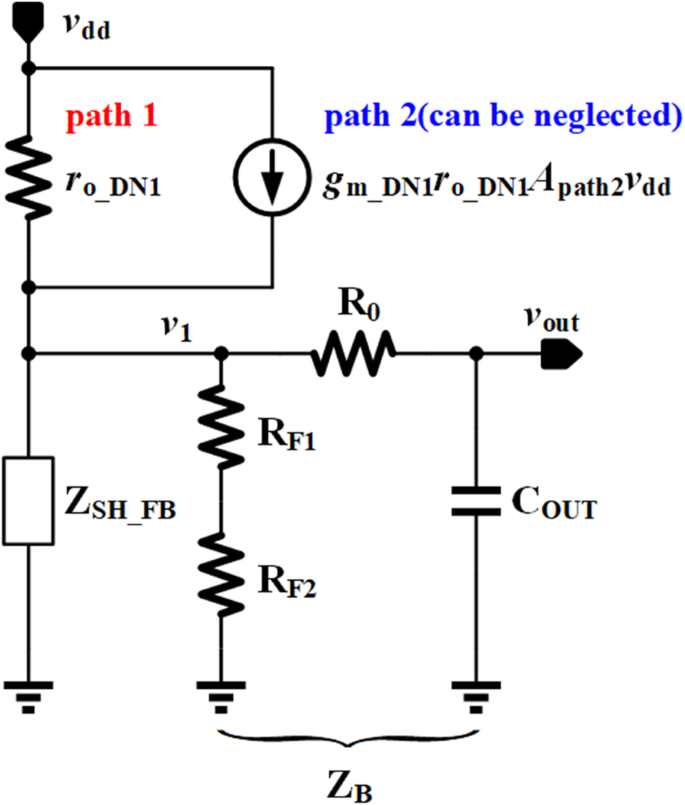
Le modèle simplifié de PSR
où g m_DN1 est la transconductance du transistor de puissance DN1. Par conséquent, la fonction de transfert PSR peut être exprimée sous la forme
$$ \mathrm{PSR}=\frac{V_{\mathrm{out}}}{V_{\mathrm{dd}}}=\frac{\left(1+{g}_{m\_\mathrm{ DN}1}{r}_{o\_\mathrm{DN}1}{A}_{\mathrm{chemin}2}\right)\left({Z}_B\Big\Vert {Z}_{ \mathrm{SH}\_\mathrm{FB}}\right)}{r_{o\_\mathrm{DN}1}+{Z}_B\Big\Vert {Z}_{\mathrm{SH}\ _\mathrm{FB}}} $$ (17)En réglant délibérément le gain intrinsèque du HV10 bien supérieur à celui du transistor de puissance DN1, g m_DN1 r o_DN1 Un chemin2 <<1 peut être atteint, et ainsi la source de courant contrôlée peut être négligée. L'expression de PSR peut être encore simplifiée comme
$$ \mathrm{PSR}\approx \frac{Z_B\Big\Vert {Z}_{\mathrm{SH}\_\mathrm{FB}}}{r_{o\_\mathrm{DN}1}+ {Z}_B\Grand\Vert {Z}_{\mathrm{SH}\_\mathrm{FB}}} $$ (18)Depuis Z B et Z SH_FB changera avec la variation de fréquence, il est nécessaire d'analyser la caractéristique de fréquence du PSR.
La basse fréquence
A basse fréquence, le gain de EA est très élevé, et C SORTIE peut être traité comme un circuit ouvert. Ainsi, Z B>> Z SH_FB et le PSR peut être écrit comme
$$ {\mathrm{PSR}}_{\mathrm{LF}}\approx \frac{1}{g_{m\_\mathrm{DN}1}{r}_{o\_\mathrm{DN} 1}\gauche(1+\beta {A}_{E0}\right)} $$ (19)La fréquence moyenne
L'impédance de Z SH_FB augmentera car le gain de boucle diminue à la fréquence moyenne. A ce stade, le Z SH_FB est encore faible et le PSR est principalement affecté par le gain de boucle. En ce qui concerne (7), le PSR peut être exprimé sous la forme
$$ {\mathrm{PSR}}_{\mathrm{MF}}\approx \frac{1}{g_{m\_\mathrm{DN}1}{r}_{o\_\mathrm{DN} 1}\left(1+\beta {A}_{E0}\right)}\frac{1+s/{\omega}_p}{1+s/\left[{\omega}_p\left(1 +\beta {A}_{E0}\right)\right]} $$ (20)Comme indiqué dans (20), le PSR s'aggrave et le bruit de la tension de sortie est plus grave lorsque la fréquence augmente dans la fréquence de gain unitaire.
La haute fréquence
En raison de l'augmentation de la fréquence, Z SH_FB devient grand et finira par se rapprocher de 1/g m_DN1 . L'impédance de C SORTIE devient plus petit, mais il est toujours beaucoup plus grand que R 0 . Alors R 0 peut être omis comme avant. La PSR haute fréquence dépend de la division de tension entre r o_DN1 et 1/g m_DN1 en parallèle avec C SORTIE , qui peut être représenté par
$$ {\mathrm{PSR}}_{\mathrm{HF}}\approx \frac{1}{g_{m\_\mathrm{DN}1}{r}_{o\_\mathrm{DN} 1}}\frac{1}{1+s{C}_{\mathrm{OUT}}/{g}_{m\_\mathrm{DN}1}} $$ (21)À haute fréquence, le bruit à la tension de sortie peut être considérablement supprimé en raison de l'effet de C SORTIE .
Comme analysé précédemment, la bonne capacité anti-bruit dans toute la gamme de fréquences de la VR proposée est garantie par trois aspects. Premièrement, un gain de boucle élevé est adopté; Deuxièmement, SPT fait que le bruit d'alimentation a peu d'impact sur la grille du transistor de puissance; Troisièmement, le condensateur de sortie C SORTIE peut améliorer le PSR à haute fréquence avec la propriété de filtrage.
Résultats et discussion
Le VR proposé a été mis en œuvre dans une technologie BCD standard de 0,35 μm. La photo de la puce du régulateur fabriqué est illustrée à la Fig. 9, dont la zone centrale active du VR est de 290 μm × 900 μm.

La puce photo de la VR proposée
La tension de sortie régulée du VR proposé est de 5 V avec une tension d'alimentation allant de 5,5 à 30 V. Le condensateur de sortie est un condensateur en céramique à faible coût. La capacité du condensateur de sortie peut être réglée de 100 nF à 3,3 μF.
La figure 10 montre la réponse en fréquence du VR proposé dans différentes conditions de charge avec un condensateur de sortie de 100 nF et 3,3 F. Le LDO proposé peut rester stable dans une large plage de valeurs de condensateur de sortie, et la forme d'onde de la réponse en fréquence de boucle a une très faible différence entre 0 et 30 mA de courant de charge, ce qui bénéficie du DLT proposé analysé auparavant.

Réponses en fréquence de boucle de la VR proposée sous une valeur différente de I Charger et C SORTIE conditions. un CSORTIE =100 nF, b CSORTIE =3,3 훍F. La ligne rouge et verte représente I Charger de 0 A et 30 mA, respectivement
Le résultat de la vérification PSR avec un condensateur de sortie de 0,1 F est illustré à la Fig. 11, où un - 110 dB à basse fréquence et mieux que - 64 dB jusqu'à 10 MHz est atteint. À basse fréquence, le VR proposé a un bon PSR en raison du gain de boucle élevé. Le PSR devient pauvre dans la fréquence de gain unitaire à cause du pôle dominé ω p . Le condensateur de sortie C SORTIE améliore la caractéristique PSR à haute fréquence. Ces résultats montrent qu'il est cohérent avec l'analyse précédente, et le VR proposé obtient un meilleur PSR dans toute la gamme de fréquences.

PSR de la VR proposée
Le résultat de la régulation de ligne du VR proposé est illustré à la Fig. 12. Dans la plage de tension d'entrée de 5,5 à 30 V, la tension de sortie ne varie que de 73,53 μV, ce qui entraîne une régulation de ligne de seulement 2,98 μV/V. Cela confirme l'efficacité du SPT proposé.

Régulation de ligne du VR proposé
La figure 13 montre la réponse transitoire de la tension de sortie due à différents courants de charge. Le pic et le creux de tension de la tension de sortie régulée sont d'environ 43 mV, 65 mV, 83 mV lorsque le courant de charge passe de 0 à 18 mA, 28 mA et 32 mA, respectivement. Cela se traduit par une régulation de charge de 0,233 mV/mA, qui est principalement causée par R 0 pour la stabilité avec une large gamme de capacité de sortie.

Forme d'onde de réponse transitoire de la VR proposée en raison de différentes étapes de courant de charge. un 0 à 18 mA ; b 0 à 28 mA ; c 0 à 32 mA
L'OCP mesuré est représenté sur la figure 14. Afin de vérifier l'efficacité de l'OCP, le court-circuit est adopté sur la figure 14a. Comme le montre la figure 14a, lorsque la surintensité se produit avec la tension de sortie tirée à la terre, le courant de sortie du VR proposé est maintenu à environ 40 mA. La figure 14b illustre une réponse transitoire entre la surintensité et la charge normale, ce qui indique que le VR proposé a une capacité d'auto-récupération en cas de surcharge.

La mesure OCP de la VR proposée. un court-circuit de sortie ; b transitoire entre la surintensité et la charge normale
Le tableau 1 présente une comparaison des performances du LDO proposé et d'autres LDO déjà publiés. En comparaison, ce LDO possède la meilleure régulation de ligne et PSR, qui bénéficie du SPT proposé. La zone active sera encore réduite si elle est fabriquée dans un processus plus avancé.
Le tableau 2 fournit une autre comparaison des performances en se concentrant sur les LDO qui ont également une large plage d'alimentation. Avec l'aide des DLT et SPT proposés, ce travail a la meilleure régulation de ligne et la plus large plage d'alimentation par rapport aux autres LDO. La fonction OCP supplémentaire rend ce travail plus compétitif et fiable.
Conclusion
Un SPT VR à haute stabilité avec DLT et OCP est mis en œuvre dans un processus BCD standard de 0,35 μm. Avec l'aide du SPT, la majeure partie de la boucle de régulation est alimentée par une tension de sortie régulée, ce qui est bénéfique pour la stabilité et l'amélioration du PSR. Le DLT proposé est utile pour la réponse transitoire et la stabilité. En outre, le circuit OCP intégré peut empêcher le VR présenté d'être endommagé par une surcharge ou un court-circuit. La régulation linéaire du VR proposé est de 2,98 V/V avec VDD de 5,5 à 30 V tandis que la tension de sortie régulée est de 5 V et la régulation de charge est de 0,233 mV/mA avec un courant de charge de 0 A à 30 mA. The overshoot and undershoot voltage during load current changing is also small by using the presented transient enhancement circuit. The PSR at low frequency is − 110 dB, and is better than − 64 dB up to 10 MHz. High loop stability can be achieved in a wide range of output capacitor and load current, and thus the proposed VR is suitable for applications that require high performance and reliability under variations of output capacitor and load current.
Disponibilité des données et des matériaux
All data generated or analysed during this study are included in this published article.
Abréviations
- VR:
-
Voltage regulator
- OCP:
-
Overcurrent protection
- SPT:
-
Self-power technique
- PSR:
-
Power supply rejection
- DLT:
-
Dynamic load technique
- EA:
-
Error amplifier
Nanomatériaux
- Régulateur de tension
- Équations et lois des circuits CC
- Circuits moyen et été
- Tension et courant
- Condensateurs et calcul
- Maxim :double émetteur-récepteur IO-Link avec régulateur DC-DC et protection contre les surtensions
- ST :régulateur à découpage avec de larges plages de tension
- Diriger avec persévérance et persévérance
- 5 étapes pour réinventer l'architecture opérationnelle et booster les résultats avec l'IoT