


Motoriser l'IoT avec des moteurs pas à pas alimentés par batterie
Cet article examine comment les moteurs pas à pas fonctionnent bien dans les tâches orientées IoT telles que le positionnement de caméras de sécurité et de capteurs à distance ou l'actionnement des bouches d'aération, des vannes et des fenêtres couvre.
Les objets intelligents dotés de capteurs jouent déjà un rôle essentiel en tant qu'« yeux et oreilles » de l'IoT. Mais, jusqu'à récemment, il y avait peu de solutions pratiques pour donner aux applications IoT des « bras et mains » pratiques et abordables qui peuvent revenir sur Internet et réagir à ce qu'ils voient ou ressentent de manière physique. Cependant, cela est en train de changer avec l'émergence de pilotes électroniques économiques compatibles avec l'IoT qui peuvent utiliser de petites batteries pour alimenter des moteurs, des moteurs pas à pas, des solénoïdes et d'autres types d'actionneurs qui traduisent l'intention virtuelle du cybermonde en actions réelles. .
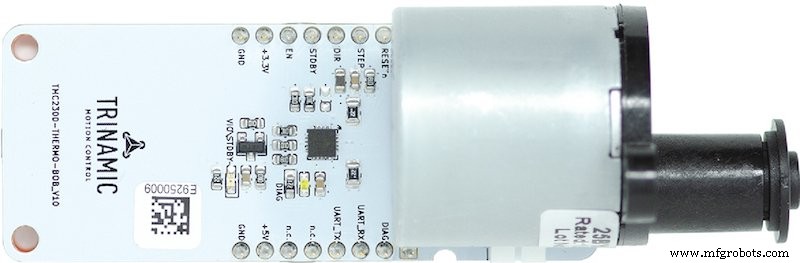
Figure 1a. Les moteurs pas à pas trouvent un nombre croissant d'applications IoT, telles que ce contrôleur de radiateur activé à distance.
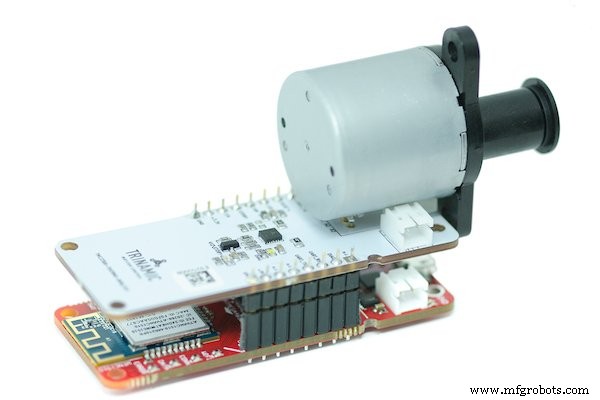
Figure 1b. Contrôleur de radiateur illustré avec une carte de développement IoT Microchip AVR.
Dans cet article, nous nous concentrerons sur les moteurs pas à pas car leurs structures segmentées de rotor et d'armature leur permettent de tourner par petites étapes précises et discrètes et de maintenir leur position lorsqu'ils ne sont pas alimentés. Cela leur permet de bien fonctionner dans les tâches orientées IoT telles que le positionnement de caméras de sécurité et de capteurs à distance ou l'actionnement des bouches d'aération, des vannes et des couvre-fenêtres.
Travailler avec une source d'alimentation limitée
Alors que certains appareils IoT motorisés sont alimentés par le secteur, un nombre croissant d'applications sont désormais nécessaires pour fonctionner dans des endroits éloignés, utilisant souvent des sources d'énergie à basse tension relativement petites, telles qu'une seule cellule Li-ion ou une batterie AA ou AAA. Dans le cas de nombreuses applications IoT à la maison et au bureau, ces applications sont censées se fondre dans l'environnement, ce qui signifie qu'elles ne peuvent pas avoir de câble d'alimentation.
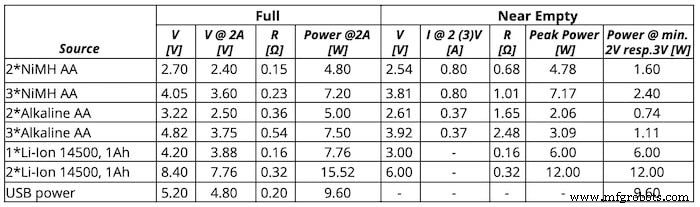
En théorie, l'alimentation par batterie fonctionnera pour bon nombre de ces applications car elles utilisent le moteur peu fréquemment, de sorte que leur impact sur la capacité limitée de la batterie est relativement faible. Mais la batterie peut ne pas être en mesure de fournir la tension d'entraînement plus élevée et les impulsions de courant relativement importantes dont un moteur pas à pas a besoin pour alimenter ses bobines. Comme le montre le tableau 1, les batteries les plus couramment disponibles ont une quantité importante de résistance interne qui réduit leur tension de sortie à mesure que leur courant de sortie augmente.
Tableau 1. Caractéristiques des petites batteries
Heureusement, il existe quelques stratégies simples pour surmonter ces limitations, notamment la mise en mémoire tampon de l'alimentation, les convertisseurs élévateurs et les moteurs pas à pas personnalisés. Examinons le fonctionnement de chacune de ces stratégies.
Tampon d'approvisionnement
Une technique simple connue sous le nom de « tampon d'alimentation » peut être utilisée pour compléter la sortie limitée d'une petite batterie en ajoutant un supercondensateur qui peut fournir une courte impulsion à courant élevé.
La taille du supercondensateur peut être calculée à l'aide de la formule :
C =dU*I/t
Où :
dU =la chute de tension interne maximale admissible de la batterie,
Je =le courant nécessaire pour compléter la sortie de la batterie, et
t =durée de fonctionnement souhaitée
À l'heure actuelle, les supercondensateurs tolèrent une tension de fonctionnement maximale de seulement 2,7 V et nécessitent un circuit de protection si la tension d'alimentation peut dépasser cette valeur. Lorsque des tensions plus élevées sont requises, deux ou plusieurs supercondensateurs peuvent être placés en série, mais le circuit doit inclure une diode Zener ou un autre dispositif pour équilibrer les tensions (Figure 2).
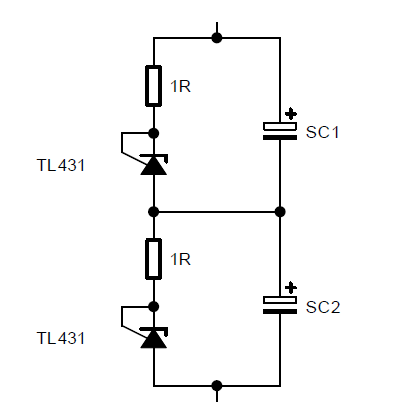
Figure 2. Un circuit d'équilibrage de supercondensateur avec protection contre les surtensions Zener (2,5 V).
Les supercondensateurs adaptés à ces types d'applications sont désormais largement disponibles auprès de nombreux fabricants de composants, notamment Maxwell, Skeleton et Vishay.
Convertisseurs élévateurs
Certains circuits intégrés, y compris de nombreux pilotes de moteur populaires, ont des difficultés à fonctionner avec les basses tensions disponibles à partir de petites batteries, en particulier lorsqu'elles approchent de la fin de leur durée de vie. Les convertisseurs élévateurs sont des circuits intégrés à faible coût qui peuvent être utilisés pour augmenter la tension d'une batterie jusqu'à trois à quatre fois et pour maintenir la tension d'alimentation de votre système à un niveau uniforme vers la fin de la durée de vie d'une batterie. Ces convertisseurs sont très efficaces (90%-95%) à des charges élevées, mais leur efficacité diminue quelque peu lorsqu'ils sont faiblement chargés. Ils peuvent être utilisés comme solution autonome ou en conjonction avec un supercondensateur.
Les fabricants de circuits intégrés produisant des convertisseurs élévateurs comprennent Analog Devices, Maxim Integrated et Texas Instruments. L'un des convertisseurs les plus fréquemment utilisés pour ce type d'application est le MAX8969 de Maxim.
Pas à pas à blessure personnalisée
La plupart des steppers, même les plus petits, sont conçus pour fonctionner sur des tensions allant de 5V à 12V, alors que la plupart des petites piles produisent 1,5V à 5V. Pour fonctionner sur ces tensions plus basses, les moteurs pas à pas ont besoin d'enroulements avec moins de tours de fil plus épais et à plus faible résistance. Heureusement, la plupart des fabricants sont configurés pour répondre aux commandes personnalisées moyennant des frais raisonnables ou sans frais.
Pour commander un moteur à enroulement personnalisé, vous devrez spécifier un courant de bobine (ICOIL), défini comme le courant RMS du moteur, qui donne le couple nominal à l'arrêt. Pour ces types d'applications, il est bon d'utiliser un moteur qui fournira le couple nécessaire à 50 % à 70 % de son courant nominal maximum afin de minimiser les pertes résistives et de fournir une certaine marge de sécurité.
La première étape de la spécification des enroulements consiste à utiliser les spécifications du moteur d'origine du fabricant pour calculer le courant nécessaire pour générer le couple requis pour votre application. Utilisez cette valeur pour calculer la tension requise pour le type de moteur à l'aide de la formule ci-dessous.

Ce calcul pour les conditions d'arrêt est également raisonnablement précis pour un fonctionnement au ralenti où il y a peu de contre-CEM. À des vitesses plus élevées, la constante de contre-électromotrice spécifique du moteur CBEMF doit également être prise en compte à l'aide des éléments suivants :

Cette formule utilise le quotient du couple de maintien et du courant de bobine assigné. Notez que dans les deux cas, la réduction du RCOIL du stepper permet un UBAT inférieur.
Si vous constatez que la tension requise du moteur pas à pas que vous avez sélectionné dépasse la tension disponible à partir de votre alimentation, contactez le fabricant du moteur au sujet d'une version à enroulement personnalisé qui fonctionnera à une tension inférieure en utilisant un courant plus élevé.
Rassembler le tout
Si vous souhaitez en savoir plus sur les techniques présentées dans cet article, vous pouvez télécharger la note d'application Trinamic #57, Comment fabriquer un thermostat avec le TMC2300, où des exemples pratiques sont utilisés pour explorer plusieurs de ces sujets plus en profondeur.
La théorie derrière ces techniques est expliquée encore plus en détail dans l'article Conception de système de commande de moteur basse tension pour un appareil IoT mobile et sans fil, que j'ai présenté à Embedded World 2020.
Ressources supplémentaires
- L'atelier des Inventables :principes de base des moteurs pas à pas
- Choisir le bon moteur pour votre projet – moteurs à courant continu vs pas à pas vs servomoteurs
- Conduire un stepper - Adafruit Industries
- Kit d'évaluation TMC2300-THERMO-BOB (PDF)
- Fiche technique :pilote pas à pas basse tension Trinamic TMC2300
Les articles sur l'industrie sont une forme de contenu qui permet aux partenaires de l'industrie de partager des actualités, des messages et des technologies utiles avec les lecteurs d'All About Circuits d'une manière qui ne convient pas au contenu éditorial. Tous les articles de l'industrie sont soumis à des directives éditoriales strictes dans le but d'offrir aux lecteurs des nouvelles utiles, une expertise technique ou des histoires. Les points de vue et opinions exprimés dans les articles de l'industrie sont ceux du partenaire et pas nécessairement ceux d'All About Circuits ou de ses rédacteurs.
Technologie de l'Internet des objets
- Le potentiel d'intégration de données visuelles avec l'IoT
- En route avec l'IoT
- Les secrets d'une infrastructure IoT avec une ville intelligente
- Les applications réelles de l'IoT et pourquoi la durée de vie de la batterie est critique
- Les services de connectivité à la demande répondent aux besoins des applications IoT
- IoT World :A Day in the Life With Vertica
- Avec les offres de plate-forme Lumada IoT, Hitachi relie les points
- Avec l'IoT d'entreprise, le meilleur reste à venir
- Débloquez la valeur de l'IoT avec la surveillance des performances