


Facteurs clés dans la conception du contrôle électronique de la vitesse d'un drone
La clé de la conception d'un drone est la capacité de contrôler la vitesse et la rotation du moteur. La plupart des drones sont alimentés par des moteurs à courant continu sans balais, qui nécessitent une régulation constante de la vitesse et du sens de rotation. Un module de contrôle électronique de la vitesse (ESC) remplit ces fonctions et comprend un étage d'alimentation, un circuit de détection de courant, un microcontrôleur et une interface de communication avec le système de commande de vol, ce qui le rend fondamental pour les drones. Cet article examine les éléments importants à considérer lors de la conception d'un ESC ainsi que les solutions de développement du marché.
Contrôle moteur
La conception d'un ESC nécessite une évaluation et une analyse minutieuses des caractéristiques qui peuvent être résumées comme suit :
- Batterie installée sur le drone
- Moteurs
- Budget disponible
- Compatibilité électromagnétique (CEM) et immunité aux interférences
Deux types de moteurs sans balais peuvent être installés sur les drones :les moteurs à courant continu sans balais (BLDC) et les moteurs à courant alternatif sans balais (BLAC), également appelés moteurs synchrones à aimants permanents (PMSM). Le choix du type de moteur à utiliser est influencé par l'algorithme de contrôle choisi, qui peut être soit un contrôle trapézoïdal, soit un contrôle orienté champ (FOC). L'algorithme de contrôle du moteur trapézoïdal présente les principales caractéristiques suivantes :
- Commande du moteur basée sur une séquence de commutation à six phases
- Détection de l'angle magnétique du rotor, utilisé pour régler l'angle correct ; chaque pas correspond à un angle de 60°
- Dans les systèmes de contrôle sans capteur, l'angle de commutation est estimé en mesurant la tension de phase de la force contre-électromotrice
L'algorithme de contrôle FOC, quant à lui, présente les caractéristiques suivantes :
- Commande du moteur au moyen de tensions ou courants de phase sinusoïdaux (FOC)
- Détection de l'angle du rotor avec une précision minimale de 1° à 5°, ce qui garantit que l'algorithme est toujours capable de fournir un couple maximal
Dans les systèmes de contrôle sans capteur, l'angle magnétique du moteur est estimé à partir des tensions et courants de phase du moteur. Sa position est déterminée en surveillant certains paramètres électriques du moteur et sans l'utilisation de capteurs supplémentaires. Le type le plus couramment utilisé dans les drones est le moteur à courant continu sans balai en raison de sa petite taille, de son coût relativement faible, de sa durabilité et de sa robustesse élevées.
La plupart des drones ont au moins quatre moteurs, la version à quatre moteurs étant la plus utilisée. L'ESC est responsable du contrôle de la vitesse de chaque moteur et, par conséquent, l'architecture de drone la plus courante implique l'utilisation dédiée d'un ESC pour chaque moteur. Tous les ESC doivent pouvoir communiquer entre eux, directement ou indirectement, via le contrôleur de vol, afin d'avoir un contrôle facile du drone. Le sens de rotation de chaque moteur est également important :dans un quadricoptère, une paire de moteurs tourne dans un sens, tandis que l'autre tourne dans le sens opposé.
La technique de contrôle du moteur la plus couramment utilisée par les fabricants d'ESC est le contrôle orienté sur le terrain, une technique qui contrôle le couple et la vitesse du moteur. Lorsqu'il est mis en œuvre correctement, le FOC peut gérer même des changements d'accélération rapides sans générer d'instabilité, permettant au drone d'effectuer des manœuvres complexes tout en maximisant l'efficacité.
Le schéma fonctionnel de la figure 1 ci-dessous montre une architecture FOC qui comprend les composants suivants :
- Régulateur de courant composé de deux contrôleurs proportionnels intégrés
- Régulateur de vitesse de boucle externe et générateur de courant de référence en option
- Transformations de Clarke, de Park et de Park inverse pour la conversion d'images stationnaires en images synchrones en rotation
- Un algorithme de modulateur vectoriel spatial pour transformer les commandes vα et vβ en signaux de modulation de largeur d'impulsion appliqués aux enroulements du stator
- Fonctions de protection et auxiliaires, y compris la logique de démarrage et d'arrêt
- Observateur facultatif pour estimer la position angulaire du rotor si un contrôle sans capteur est souhaité
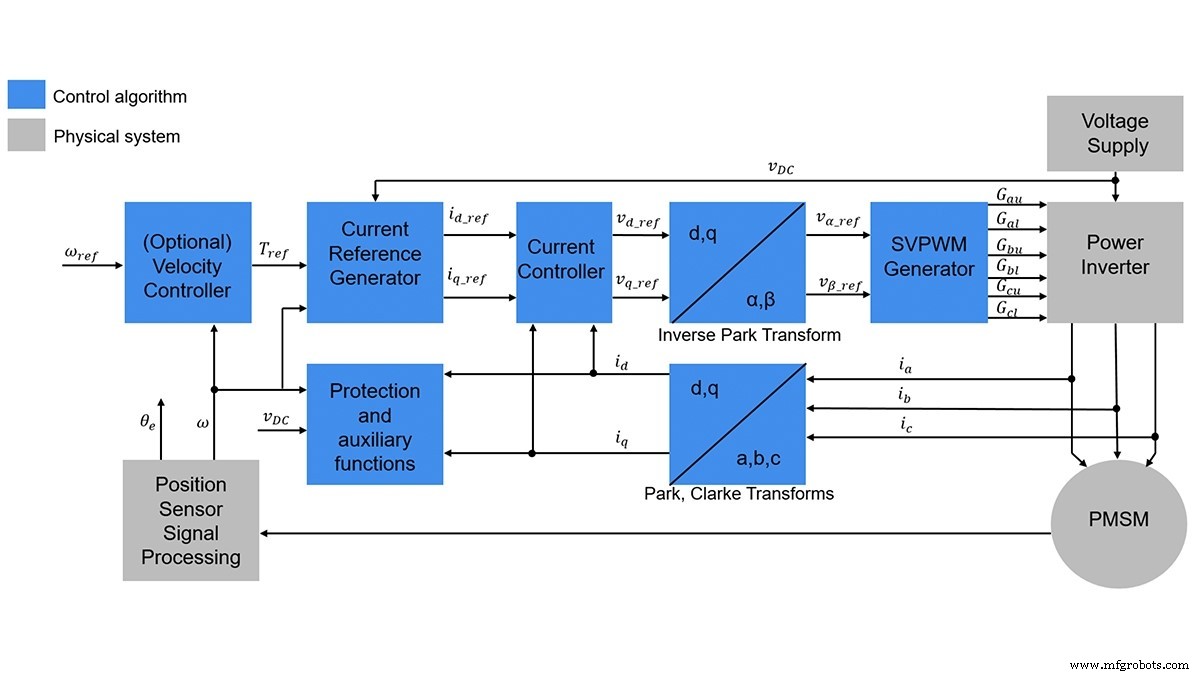
Figure 1. Schéma fonctionnel du contrôle orienté champ (Source :Mathworks)
Les ingénieurs en contrôle moteur concevant un FOC effectuent plusieurs tâches, notamment le développement de l'architecture du contrôleur avec deux contrôleurs PI pour la boucle de courant, l'optimisation des gains de tous les contrôleurs PI pour répondre aux exigences de performances et la conception d'un modulateur vectoriel spatial pour contrôler le PWM.
Une fois l'algorithme de contrôle choisi (trapézoïdal ou FOC), l'étape suivante consiste à choisir entre un système de contrôle en boucle ouverte ou en boucle fermée. Dans le contrôle en boucle ouverte, le moteur synchrone (BLDC ou BLAC) est entraîné via un signal de commande et est supposé suivre l'action de commande commandée. Dans le système de contrôle en boucle fermée, le circuit est capable de vérifier si le moteur se déplace comme prévu. Si ce n'est pas le cas, le système de contrôle compense automatiquement le mouvement excessif ou insuffisant en réduisant ou en augmentant le courant.
Lors de l'utilisation d'un système de contrôle en boucle fermée ou en boucle ouverte (sans capteur), les courants et les tensions doivent être mesurés pour être utilisés comme signaux de retour. La figure 2 montre une configuration de mesure typique, adaptée aux systèmes de contrôle trapézoïdal et sinusoïdal. En utilisant le contrôle trapézoïdal avec un algorithme sans capteur, les tensions triphasées sont utilisées par l'algorithme sans capteur pour calculer l'angle du rotor.
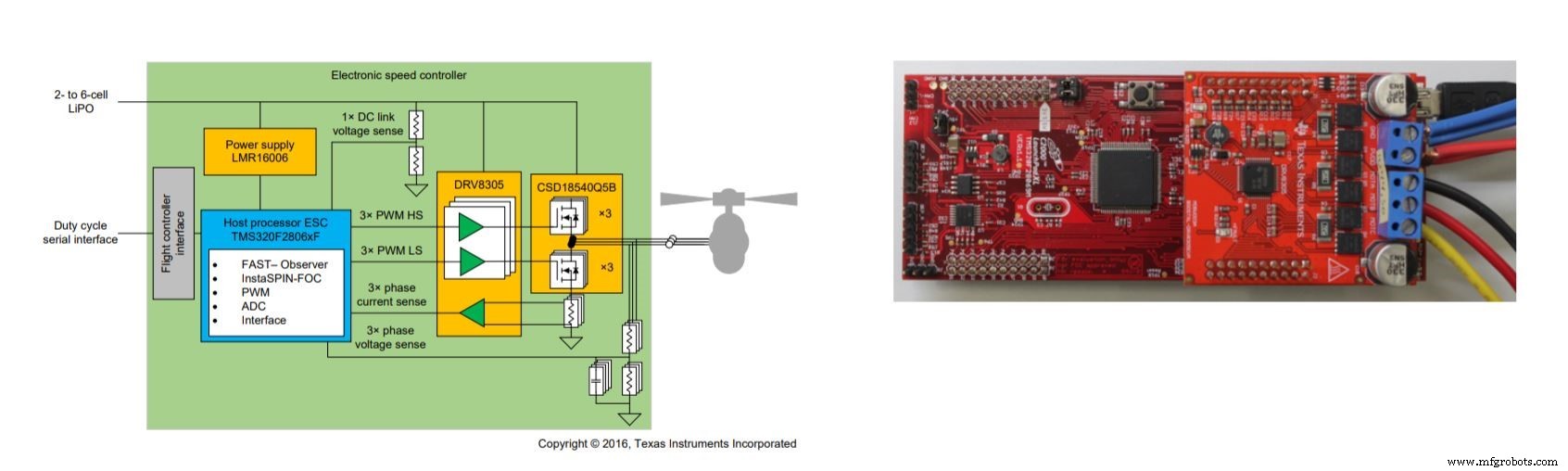
Figure 2. ESC avec commande de moteur sans capteur. Sur la droite se trouve la conception de référence FOC sans capteur à grande vitesse pour les drones ESC de Texas Instruments, et sur la gauche se trouve son schéma fonctionnel. (Source :Texas Instruments)
Dynamique du quadricoptère
La simplicité mécanique et la stabilité aérodynamique des drones sont liées à l'utilisation coordonnée des moteurs et de leurs manœuvres. Dans un quadricoptère, la paire de moteurs positionnés sur la diagonale de la structure tourne dans le même sens mais en sens inverse des deux autres moteurs. Si les quatre moteurs tournent à la même vitesse, le drone peut monter, descendre ou rester en palier. Si la paire diagonale tourne plus vite que l'autre, le drone tourne autour de son centre de gravité et reste dans le même plan horizontal (Figure 3).
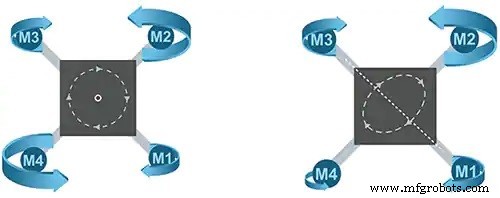
Figure 3. Les drones utilisent différentes combinaisons de vitesses de rotor pour effectuer des manœuvres. (Source :STMicroelectronics)
Si vous modifiez la vitesse du rotor de tête (ou de queue), le drone pointera vers le haut ou vers le bas comme un avion à voilure fixe plongeant. Le réglage du couple à gauche ou à droite fera rouler le drone, le faisant tourner autour de son axe. Il appartient au système de contrôle de vol du drone de modifier la vitesse du rotor appropriée pour atteindre l'altitude de vol requise pour effectuer la manœuvre souhaitée.
Pour un ingénieur de contrôle, la correction de vitesse est un problème de retour de boucle de contrôle courant qui est résolu avec un contrôleur proportionnel, intégral, dérivé (PID).
Concevoir un ESC
La conception d'un ESC pour drones nécessite des composants de haute qualité spécialement conçus pour contrôler les moteurs à haut régime (12 000+ RPM). Texas Instruments a développé une famille de microcontrôleurs, appelée InstaSPIN, qui simplifie la conception d'applications de commande de moteur triphasé. InstaSPIN-FOC, adapté aux systèmes sans capteur, dispose d'un encodeur logiciel rapide avec contrôle de couple et de vitesse adapté à tout moteur triphasé. InstaSPIN-MOTION est destiné aux systèmes sans capteur et fournit un contrôle de position, de vitesse et de couple pour tout moteur triphasé.
Une conception de référence complète pour ces oscilloscopes est fournie par TI et se compose des technologies de commande de moteur InstaSPIN-FOC et InstaSPIN-MOTION. La plate-forme comprend un microcontrôleur TI C2000 InstaSPIN 32 bits. Il permet aux développeurs d'identifier, de régler automatiquement et de contrôler un moteur triphasé, fournissant rapidement un système de contrôle de moteur stable et fonctionnel.
STMicroelectronics propose une conception de référence ESC complète, mettant en œuvre un algorithme FOC sans capteur. La conception de référence de l'ESC STEVAL-ESC001V1 convient aux conceptions de drones commerciaux d'entrée de gamme et entraîne tout moteur sans balai triphasé (ou PMSM) alimenté par des batteries LiPo 6S ou toute alimentation CC équivalente, jusqu'à 30 A de courant de crête. STEVAL-ESC001V1 permet aux concepteurs de développer rapidement leur application grâce à un progiciel complet préconfiguré (STSW-ESC001V1), mettant en œuvre un algorithme contrôlé orienté champ sans capteur avec lecture de courant à trois shunts, contrôle de la vitesse et freinage actif complet. Le progiciel/logiciel STSW-ESC001V1 ainsi que la bibliothèque MC du kit de développement logiciel STM32 PMSM FOC permettent d'optimiser la conception de l'ESC en agissant sur les paramètres FOC intégrés dans un MCU STM32 et exploitent le profileur de moteur ST pour récupérer rapidement les paramètres de moteur pertinents. L'algorithme FOC sans capteur de ST peut être adapté à n'importe quelle application de moteur BLDC ou PMSM triphasé, offrant des temps de vol plus longs et des performances dynamiques optimales (Figures 4 et 5).
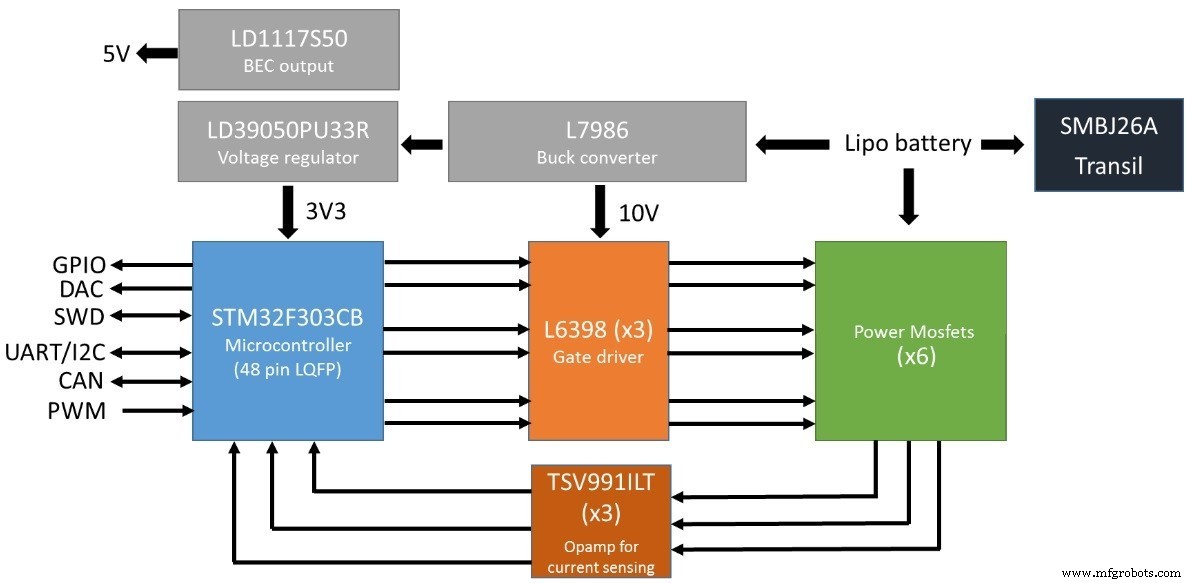
Figure 4. Schéma fonctionnel de la solution STEVAL-ESC001V1 de ST (Source :STMicroelectronics)
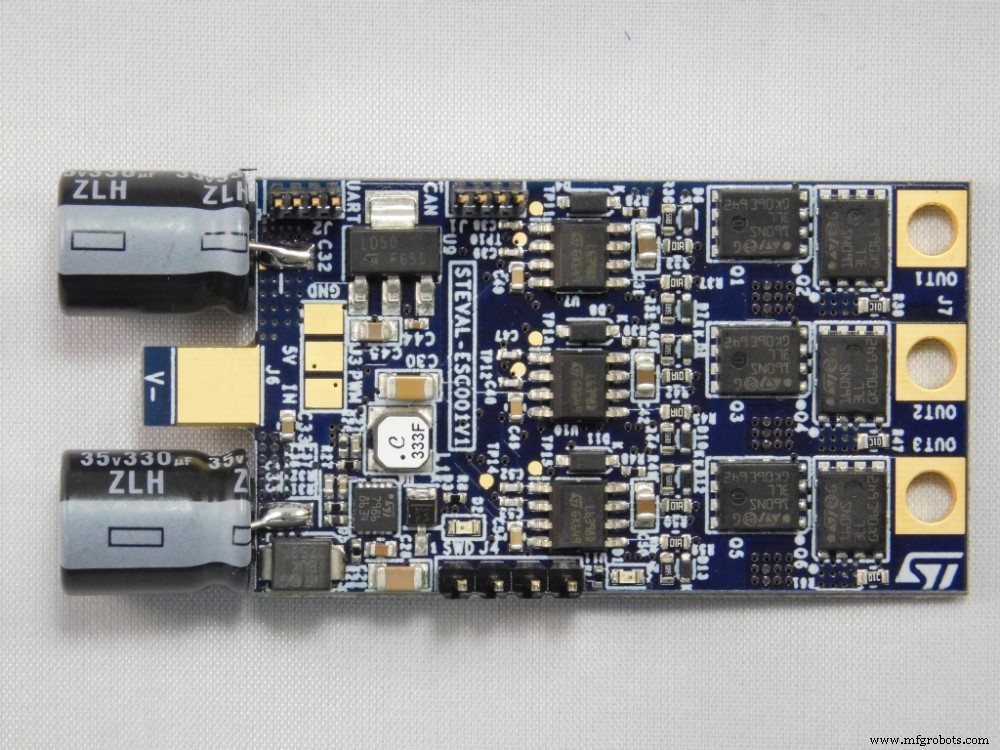
Figure 5. Carte STEVAL-ESC001V1 de ST (Source :STMicroelectronics)
La plate-forme de développement de drones HoverGames est une solution matérielle/logicielle NXP modulaire et flexible qui peut être utilisée pour construire n'importe quel véhicule autonome, des drones et rovers aux drones. Le kit de développement est essentiellement basé sur un microprocesseur avec Linux et Open CV et divers capteurs d'accompagnement pour guider le vol.
Le contrôleur de vol s'assure que le drone reste stable. La carte est open-source avec la possibilité d'insérer d'autres capteurs externes pour optimiser les opérations en fonction de la fonctionnalité.
Une batterie LiPo et une radio de télémétrie spécifique au pays doivent être implémentées à l'aide de l'une des connexions IoT. Pour une fonctionnalité complète du kit, vous devrez sélectionner laquelle des deux radios de télémétrie disponibles acheter. Grâce à la télémétrie, vous pouvez avoir une connexion en direct avec le véhicule pendant le vol et pouvez voir l'état du drone pendant le vol, charger et contrôler des points de cheminement autonomes et apporter les modifications nécessaires. Les données de télémétrie sont envoyées à la station de contrôle mais également stockées à bord dans l'unité de vol.
Les composants du kit comprennent également un module d'alimentation CC à CC, un module GPS NEO-M8N avec support, un interrupteur de sécurité, un avertisseur sonore, une LED d'état RVB lumineuse, un câble SEGGER J-Link EDU Mini/FTDI USB-TTL-3V3/une carte de débogage avec câble , moteurs brushless BLDC 2212 920 kV et contrôleurs de moteur ESC 40 A OPTO (Figure 6).
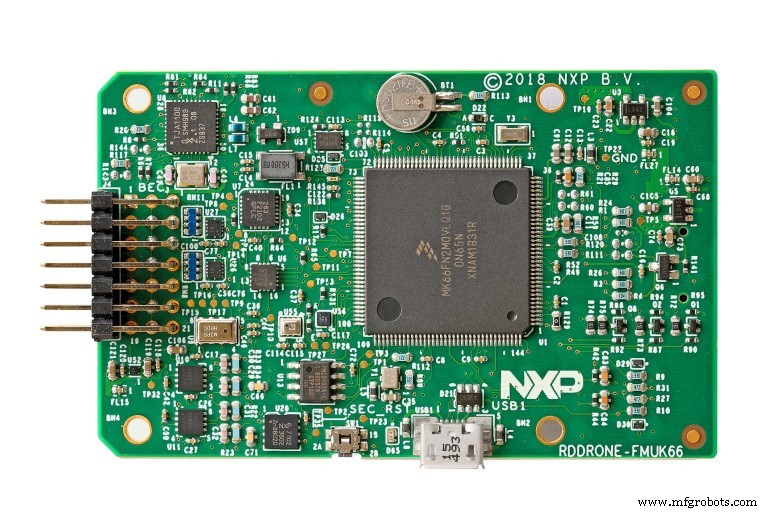
Figure 6. Unité de vol RDDRONE-FMUK66 (Source :NXP)
>> Cet article a été initialement publié le notre site sœur, Power Electronics News.
Contenus associés :
- Conception de régulateurs de vitesse électroniques pour drones
- Les drones continuent d'évoluer avec les solutions de recharge sans fil
- Le capteur LiDAR prend en charge l'imagerie haute résolution dans les drones
- Les kits de développement offrent des plates-formes pour les conceptions de commande de moteur à alimentation numérique
- Conception de commandes de moteurs pour systèmes robotiques
- La fusion de capteurs apporte de multiples avantages
Pour plus d'informations sur Embedded, abonnez-vous à la newsletter hebdomadaire d'Embedded.
Embarqué
- Renesas étend les options de microcontrôleur pour la servocommande dans les robots industriels
- Conception de commandes de moteurs pour systèmes robotiques
- Le contrôleur de moteur intègre le noyau Arm Cortex-M0
- Le contrôle qualité est la première étape vers la fiabilité du moteur
- Contrôle de la tension dans le traitement des bandes - Composants clés
- Compresseurs VSD intégrés :8 avantages clés
- Ce qui détermine la vitesse d'un moteur hydraulique
- Comment contrôler la vitesse d'un moteur hydraulique ?
- Qu'est-ce qui détermine la vitesse d'un moteur hydraulique ?