


Aller plus vite et plus loin avec Fieldbus
Les experts de l'industrie, tels que PROCENTEC, montrent une croissance constante de l'adoption de la technologie de bus de terrain basée sur RS-485 (PROFIBUS ® ) et une croissance rapide pour Industrial Ethernet (PROFINET). En 2018, 61 millions de nœuds de bus de terrain PROFIBUS étaient installés dans le monde, l'automatisation des processus PROFIBUS (PA) augmentant de 7 % d'une année sur l'autre. La base d'installation de PROFINET compte 26 millions de nœuds, avec 5,1 millions d'appareils installés rien qu'en 2018. 1
Avec cette croissance constante de l'adoption du bus de terrain RS-485 et l'accélération du déploiement de l'industrie 4.0 d'usines connectées intelligentes, s'assurer que les technologies de bus de terrain sont optimisées permet de mettre en place un système intelligent. Les technologies de bus de terrain optimisées doivent soigneusement équilibrer la robustesse CEM et la transmission de données fiable.
Une transmission de données non fiable réduira les performances globales du système. Dans les applications de contrôle de mouvement, le bus de terrain est généralement utilisé pour le contrôle de position en boucle fermée de moteurs à un ou plusieurs axes. Des débits de données élevés et des câbles longs sont courants, comme le montre la figure 1. Si le contrôle de position n'est pas fiable, la dégradation des performances en termes pratiques signifie un débit de machine de qualité inférieure et une productivité d'usine réduite. Dans les applications d'infrastructure sans fil, le bus de terrain est généralement utilisé pour le contrôle de l'inclinaison/de la position de l'antenne, où une transmission de données précise est essentielle. Dans les applications de contrôle de mouvement et d'infrastructure sans fil, différents niveaux de protection CEM sont requis, comme le montre la Figure 1. Les applications de contrôle de mouvement fonctionnent généralement dans des environnements électriquement bruyants, ce qui peut provoquer des erreurs de données. En comparaison, l'infrastructure sans fil doit être protégée contre les coups de foudre indirects dommageables dans un environnement exposé.
Pour ces applications exigeantes, un examen minutieux des performances de synchronisation de l'émetteur-récepteur RS-485 sur les câbles est nécessaire pour garantir un système fiable, ainsi qu'une caractérisation CEM. Cet article présente certains concepts clés de synchronisation du système et de câble de communication ; fournit des indicateurs de performance clés, y compris la distribution d'horloge et de données et la capacité de conduite de câble ; et démontre les avantages pour les applications industrielles utilisant des émetteurs-récepteurs RS-485 de nouvelle génération.
Performance de synchronisation
Lorsque l'on envisage une transmission de données fiable à des débits de données élevés sur de longues longueurs de câble, les concepts de performances de synchronisation, tels que la gigue et l'asymétrie, souvent associés à la signalisation différentielle basse tension (LVDS), deviennent importants pour RS-485. La gigue et l'inclinaison ajoutées à la fois par l'émetteur-récepteur RS-485 et le câble système doivent être examinées.
cliquez pour agrandir l'image
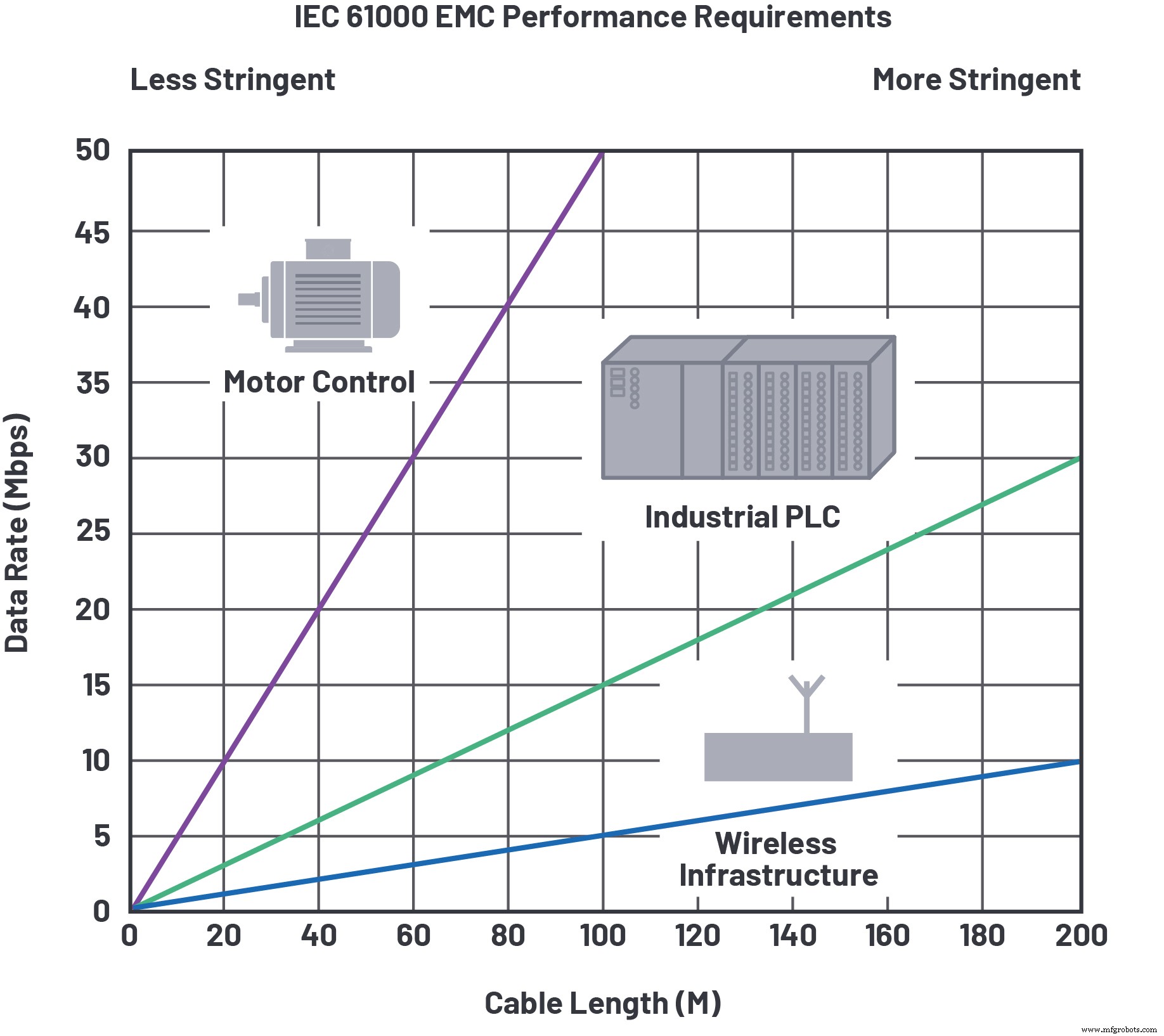
Figure 1. CEM, débit de données et longueur de câble pour RS-485. (Source :Appareils analogiques)
Gigue et biais
La gigue peut être quantifiée comme une erreur d'intervalle de temps, en particulier la différence entre l'heure d'arrivée prévue d'une transition de signal et le moment où cette transition arrive en pratique. Au sein d'un lien de communication, il existe différents contributeurs à la gigue. Chaque contributeur peut être largement décrit comme étant de nature aléatoire ou déterministe. La gigue aléatoire peut être identifiée à partir de sa distribution gaussienne et provient du bruit thermique et du bruit de grenaille à large bande dans un semi-conducteur. La gigue déterministe résulte de sources au sein du système de communication ; par exemple, distorsion du cycle de service, diaphonie, sources de bruit externes périodiques ou interférence entre symboles. Dans les systèmes de communication utilisant la norme RS-485, les débits de données sont inférieurs à 100 MHz, où ces effets de gigue déterministes dominent les effets aléatoires.
La valeur de gigue crête à crête est une mesure utile de la gigue totale du système résultant de sources déterministes. La gigue crête à crête peut être examinée dans le domaine temporel en superposant un grand nombre de transitions de signal sur le même affichage (communément appelé diagramme de l'œil). Ceci peut être réalisé sur un affichage d'oscilloscope en utilisant une persistance infinie, ou avec le logiciel de décomposition de gigue intégré d'un oscilloscope, comme illustré à la figure 2. 2
cliquez pour agrandir l'image
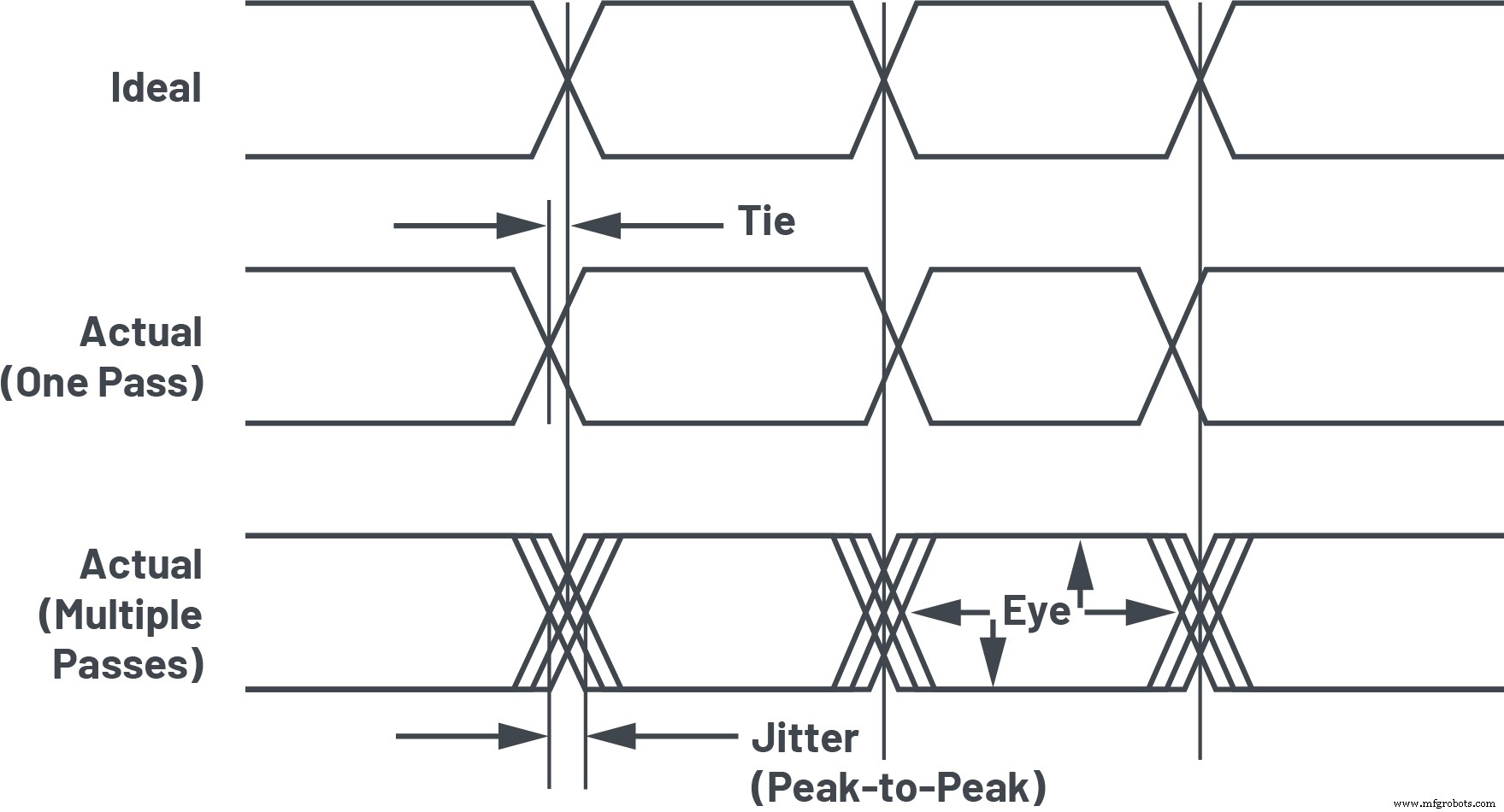
Figure 2. Erreur d'intervalle de temps, gigue et œil. (Source :Appareils analogiques)
La largeur des transitions superposées correspond à la gigue crête à crête, la zone ouverte intermédiaire étant appelée l'œil. Cet œil est la zone disponible pour l'échantillonnage par le nœud de réception à l'extrémité d'un long câble RS-485. Une plus grande largeur d'œil offre au nœud de réception une fenêtre d'échantillonnage plus large et réduit le risque de recevoir incorrectement un bit. L'œil disponible est principalement affecté par les contributions de gigue déterministe du pilote et du récepteur RS-485 et du câble d'interconnexion.
cliquez pour agrandir l'image
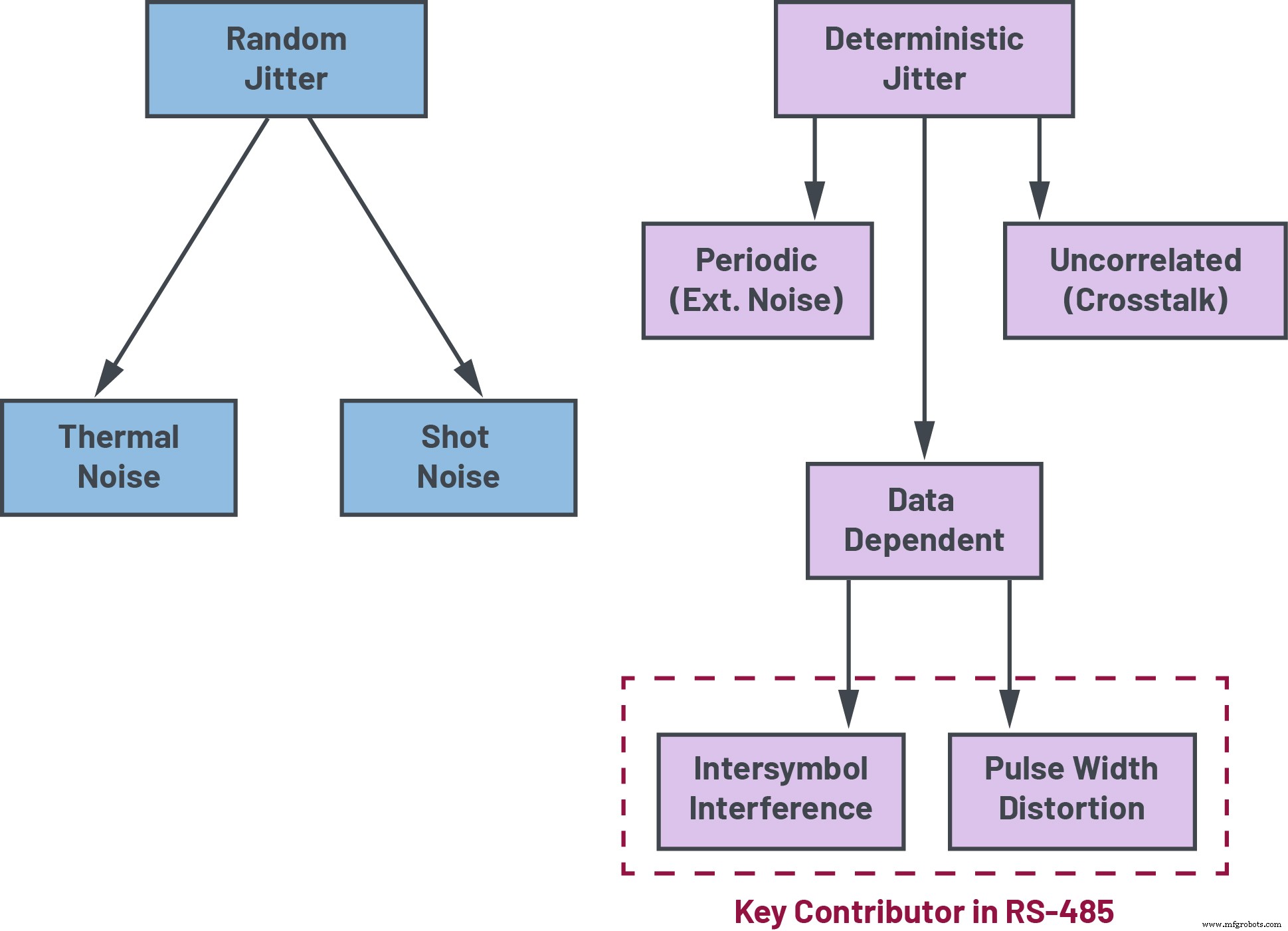
Figure 3. Principaux contributeurs à la gigue dans les réseaux de communication RS-485. (Source :Appareils analogiques)
La figure 3 montre les différentes sources de gigue dans un réseau de communication. Dans les systèmes de communication basés sur RS-485, deux facteurs clés des performances de synchronisation sont le décalage d'impulsion de l'émetteur-récepteur et les interférences entre symboles. Le décalage d'impulsion, également connu sous le nom de distorsion de largeur d'impulsion ou distorsion de rapport cyclique, est une forme de gigue déterministe introduite par les émetteurs-récepteurs aux nœuds d'émission et de réception. Le décalage d'impulsion est défini comme la différence de délai de propagation entre les fronts montants et descendants d'un signal. Dans les communications différentielles, ce biais crée un point de croisement asymétrique et un décalage entre la durée des 0 et des 1 transmis. Dans un système de distribution d'horloge, un décalage d'impulsion excessif se manifeste par une distorsion du cycle de service de l'horloge transmise. Dans un système de distribution de données, cette asymétrie augmente la gigue crête à crête observée dans le diagramme de l'œil. Dans les deux cas, une distorsion excessive des impulsions a un impact négatif sur les signaux transmis via RS-485 et réduit à la fois la fenêtre d'échantillonnage disponible et les performances globales du système.
L'interférence intersymbole (ISI) se produit lorsque l'heure d'arrivée d'un front de signal est influencée par le modèle de données qui a suivi ce front. Les effets d'interférence entre symboles deviennent importants dans les applications avec des interconnexions de câbles plus longues, faisant d'ISI un contributeur clé dans les réseaux RS-485. L'interconnexion plus longue crée une constante de temps RC où la capacité du câble n'a pas été complètement chargée à la fin d'une seule période de bit. Dans les applications où les données transmises consistent uniquement en une horloge, cette forme d'interférence entre symboles n'est pas présente. Les interférences entre symboles peuvent également être causées par des écarts d'impédance sur la ligne de transmission par câble, par des tronçons de ligne ou par une mauvaise utilisation des résistances de terminaison. Les émetteurs-récepteurs RS-485 avec une puissance de sortie élevée aident généralement à minimiser les effets ISI car ils nécessitent moins de temps pour charger la capacité de charge du câble RS-485.
Le pourcentage de gigue de crête à crête tolérable dépend fortement de l'application, et généralement 10 % de gigue sont utilisés pour comparer la combinaison de l'émetteur-récepteur RS-485 et des performances du câble. Une combinaison de gigue et d'asymétrie excessive affecte la capacité d'échantillonnage de l'émetteur-récepteur RS-485 récepteur, augmentant la probabilité d'erreurs de communication. Dans les réseaux de transmission correctement terminés, le choix d'un émetteur-récepteur optimisé pour minimiser le décalage d'impulsion de l'émetteur-récepteur et les effets d'interférence entre symboles permet d'obtenir une liaison de communication plus fiable et sans erreur.
Conception de l'émetteur-récepteur RS-485 et effets de câble
La norme TIA-485-A/EIA-485-A RS-485 3 fournit des spécifications pour la conception et la plage de fonctionnement des émetteurs et récepteurs RS-485, y compris la tension différentielle de sortie (VOD), les caractéristiques de court-circuit, la charge en mode commun et les seuils et plages de tension d'entrée. Les performances de synchronisation RS-485, y compris l'asymétrie et la gigue, ne sont pas spécifiées dans la norme TIA-485-A/EIA-485-A et sont optimisées par les fournisseurs de circuits intégrés avec les spécifications de la fiche technique du produit.
Autres normes, telles que TIA-568-B.2/EIA-568-B.2, norme de télécommunications pour le câblage à paires torsadées 4 fournir un arrière-plan pour les effets ca et cc du câble sur la qualité du signal RS-485. Cette norme fournit des considérations et des procédures de test pour la gigue, l'asymétrie et d'autres mesures de synchronisation, avec des limites de performance définies ; par exemple, l'inclinaison maximale autorisée des câbles de catégorie 5e est de 45 ns par 100 m. Lisez Performances RS-485 améliorées pour plus d'informations sur la norme TIA-568-B.2/EIA-568-B.2 et les conséquences de l'utilisation d'un câblage non idéal sur les performances du système.
Bien que les normes disponibles et les fiches techniques des produits fournissent une bonne source d'informations utiles, toute caractérisation significative des performances de synchronisation du système nécessite la mesure d'un émetteur-récepteur RS-485 sur un long câble.
cliquez pour agrandir l'image
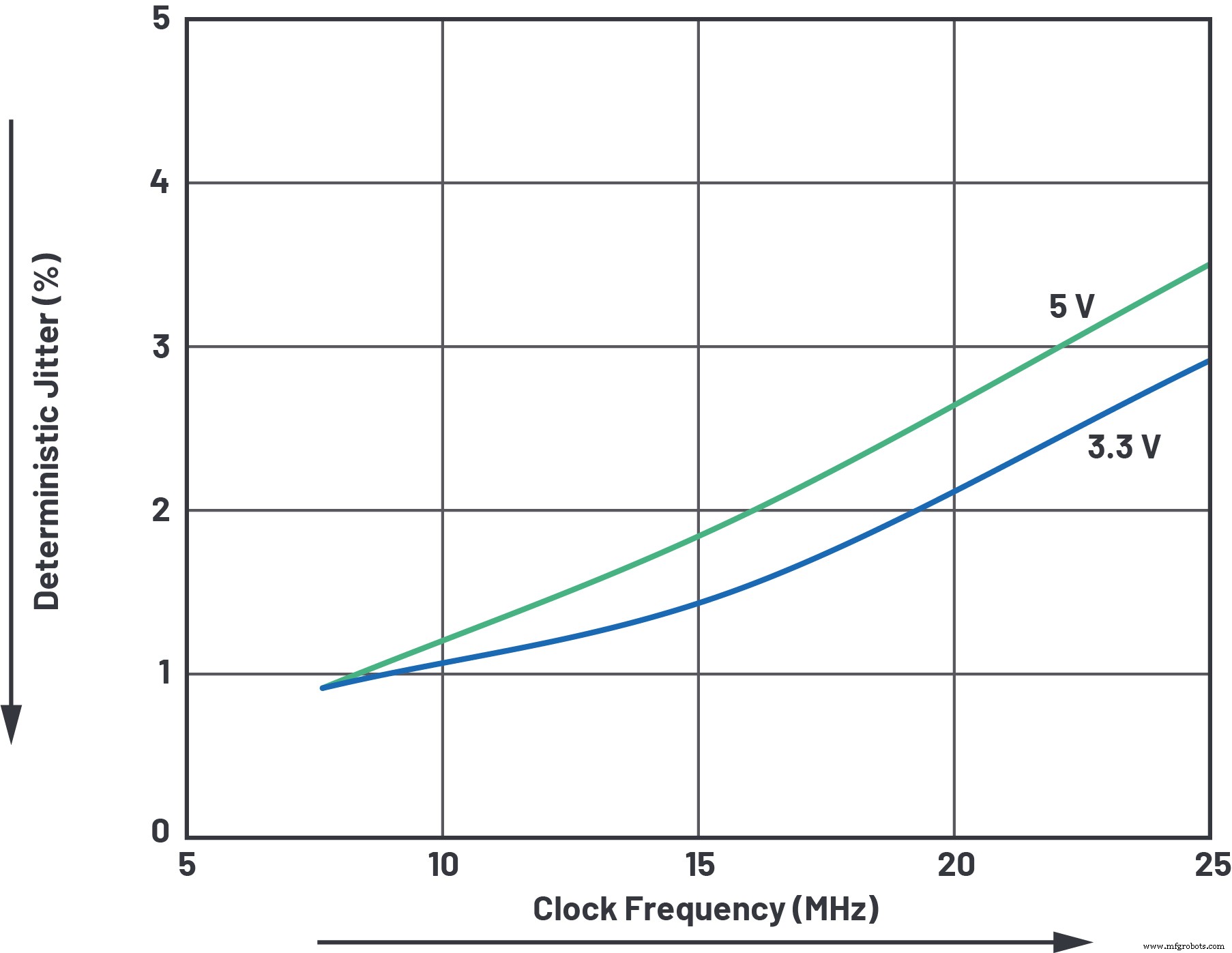
Figure 4. Performances typiques de la gigue d'horloge de l'ADM3065E. (Source :Appareils analogiques)
Communiquer plus rapidement et plus loin avec RS-485
Les émetteurs-récepteurs RS-475 de nouvelle génération offrent des performances améliorées pour répondre aux besoins des applications utilisant des normes telles que TIA-485-A/EIA-485-A qui ne définissent pas l'asymétrie et la gigue. Par exemple, les émetteurs-récepteurs RS0485 comme l'ADM3065E d'Analog Devices offrent des performances d'asymétrie d'émetteur et de récepteur ultra-faibles. Cela permet aux systèmes de prendre en charge la transmission d'une horloge de précision, qui est souvent présente dans les normes de codage de moteur, telles que EnDat 2.2. 5 Comme le montrent les figures 4 et 5, il a été démontré que les systèmes présentent une gigue déterministe inférieure à 5 % sur des longueurs de câble typiques rencontrées dans les applications de commande de moteur. La large plage d'alimentation de l'émetteur-récepteur signifie que ce niveau de performances de synchronisation est disponible pour les applications nécessitant une alimentation d'émetteur-récepteur de 3,3 V ou 5 V.
cliquez pour agrandir l'image
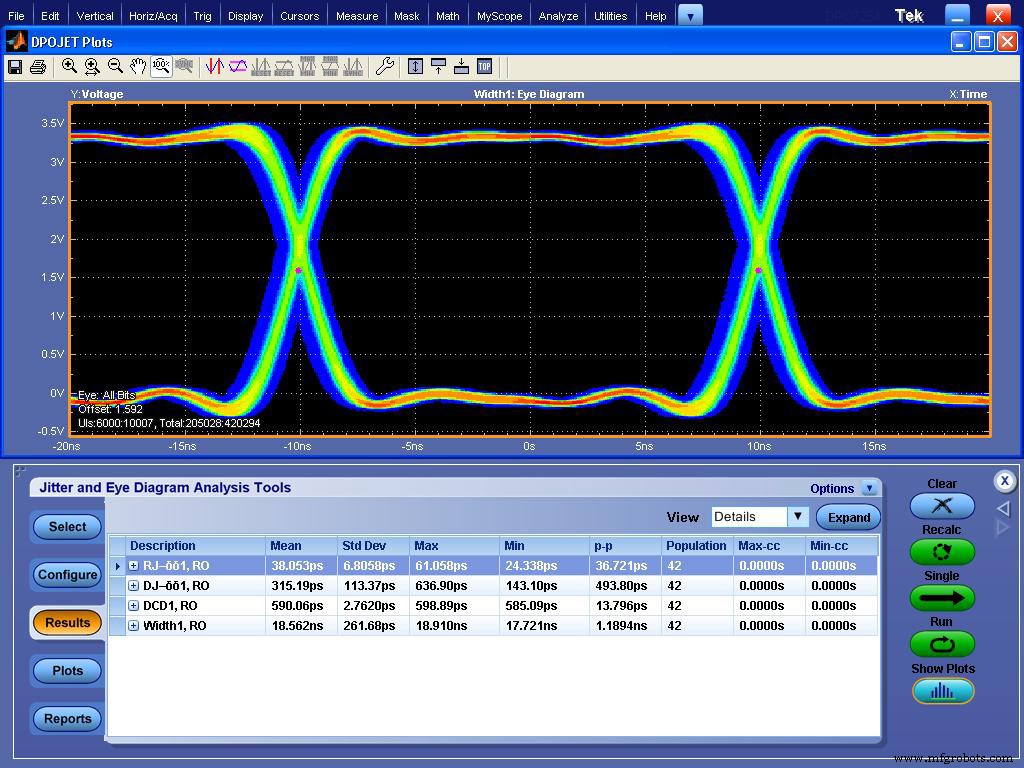
Figure 5. Schéma de l'œil de réception ADM3065E :horloge de 25 MHz répartie sur 100 m de câble. (Source :Appareils analogiques)
En plus d'une distribution d'horloge supérieure, des performances de synchronisation améliorées permettent également une distribution de données fiable, avec des sorties à grande vitesse et une gigue ajoutée minimale. La figure 6 montre qu'en utilisant un émetteur-récepteur amélioré, les limitations temporelles généralement indiquées pour la communication de données RS-485 peuvent être considérablement assouplies. Les émetteurs-récepteurs RS-485 standard sont généralement indiqués pour un fonctionnement avec 10 % ou moins de gigue. L'ADM3065E peut fonctionner à plus de 20 Mbps sur jusqu'à 100 m de câble, tout en conservant seulement 10 % de gigue au niveau du nœud de réception. Ce faible niveau de gigue réduit le risque d'échantillonnage incorrect par le nœud de données de réception et se traduit par une fiabilité de la transmission qui n'était pas possible auparavant avec des émetteurs-récepteurs RS-485 typiques. Dans les applications où le nœud de réception peut tolérer des niveaux de gigue allant jusqu'à 20 %, des débits de données allant jusqu'à 35 Mbit/s sur des longueurs de câble de 100 m sont réalisables.
cliquez pour agrandir l'image
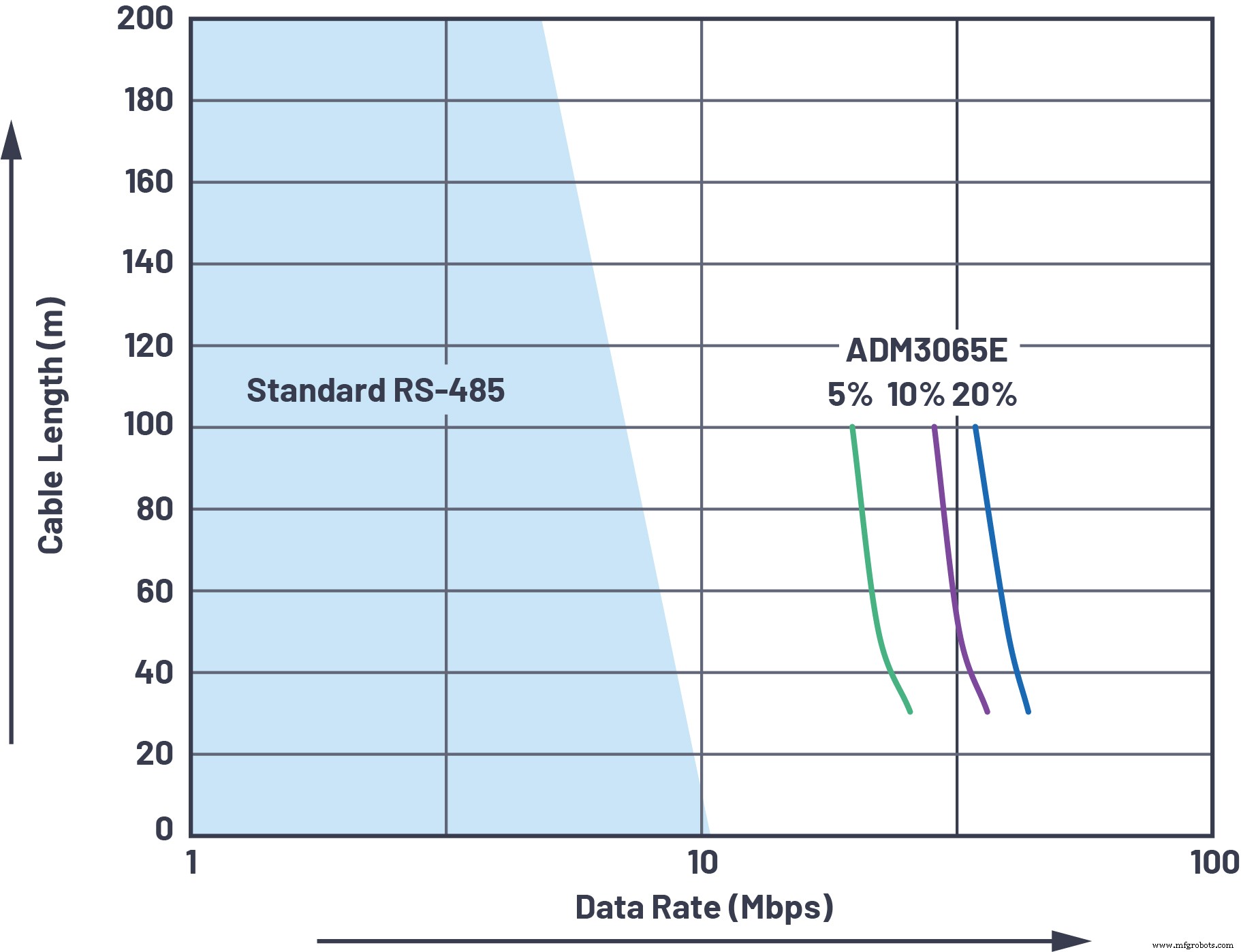
Figure 6. ADM3065E recevant des performances de gigue supérieures au nœud de données. (Source :Appareils analogiques)
Pour chaque paquet transféré à l'aide du protocole d'encodeur EnDat 2.2, les données sont transmises en synchronisation avec les fronts d'horloge descendants. La figure 7 illustre que le(s) bit(s) de départ commencent la transmission des données du codeur vers le contrôleur maître, après le calcul initial de la position absolue (TCAL). Les bits d'erreur suivants (F1, F2) indiquent quand un dysfonctionnement du codeur peut entraîner des valeurs de position incorrectes. L'encodeur transmet alors une valeur de position absolue, commençant par LS, suivie de données. L'intégrité du signal de l'horloge et des données est essentielle pour une position réussie et une signalisation d'erreur sur de longs câbles, EnDat 2.2 spécifiant une gigue maximale de 10 %. EnDat 2.2 spécifie un fonctionnement maximal à une fréquence d'horloge de 16 MHz sur 20 m de câblage. La figure 4 montre que ces exigences peuvent être satisfaites avec seulement 5 % de gigue d'horloge, et la figure 6 montre que les exigences de gigue pour la transmission de données sont satisfaites, contrairement aux émetteurs-récepteurs RS-485 standard. Ceci est important car des performances de synchronisation supérieures par rapport aux câbles garantissent que les concepteurs de systèmes disposent des informations nécessaires pour permettre une conception conçue avec succès pour répondre à la spécification EnDat 2.2.
cliquez pour agrandir l'image
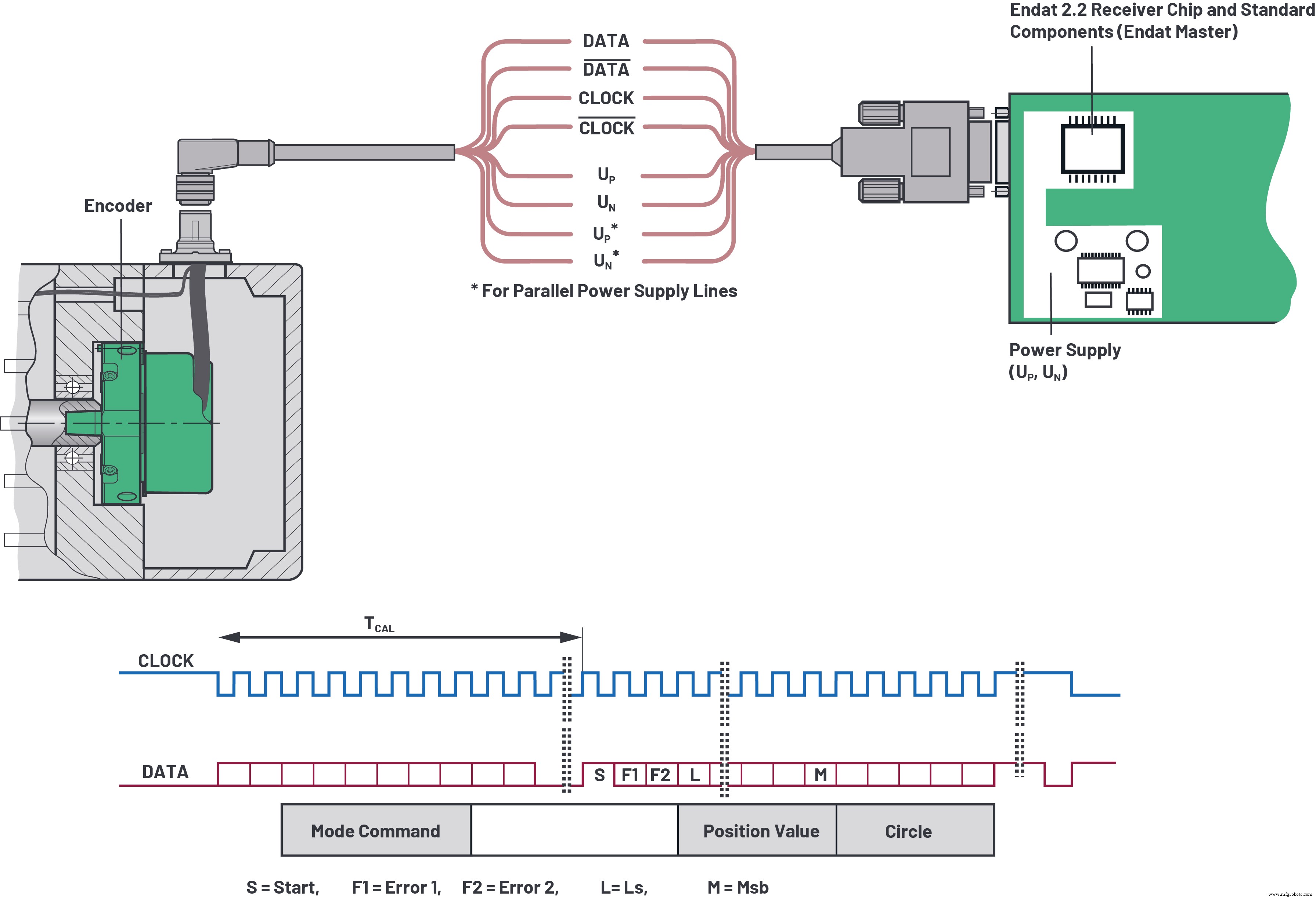
Figure 7. Couche physique et protocole EnDat 2.2 avec synchronisation horloge/données (schémas adaptés d'EnDat 2.2). (Source :Appareils analogiques)
Meilleure fiabilité sur des câbles plus longs
La norme TIA-485-A/EIA-485-A RS-485 3 nécessite des pilotes RS-485 conformes pour générer une amplitude de tension différentielle, VOD, d'au moins 1,5 V dans un réseau entièrement chargé. Ce 1,5 VOD permet une atténuation de la tension continue de 1,3 V sur de longues longueurs de câble, avec des récepteurs RS-485 spécifiés pour fonctionner avec au moins 200 mV de tension différentielle d'entrée. Avec un émetteur-récepteur conçu pour produire une VOD d'au moins 2,1 V lorsqu'il est alimenté à 5 V, les concepteurs peuvent dépasser les exigences de la spécification RS-485.
Un réseau RS-485 entièrement chargé équivaut à une charge différentielle de 54 Ω, qui simule un bus à double terminaison de deux résistances de 120 avec 750 supplémentaires représentant 32 appareils connectés de 1 unité de charge, soit 12 kΩ. L'ADM3065E dispose d'une architecture de sortie propriétaire pour maximiser la VOD tout en respectant la plage de tension en mode commun requise, dépassant les exigences de TIA-485-A/EIA-485-A. La Figure 8 illustre comment l'émetteur-récepteur dépasse les exigences du variateur de la norme RS-485 de>210 % lorsqu'il est alimenté par un rail d'alimentation de 3,3 V, ou de> 300 % lorsqu'il est alimenté par un rail d'alimentation de 5 V. Cela permet aux systèmes de communiquer davantage, avec plus de nœuds distants et avec plus de marge de bruit, que les émetteurs-récepteurs RS-485 classiques.
cliquez pour agrandir l'image
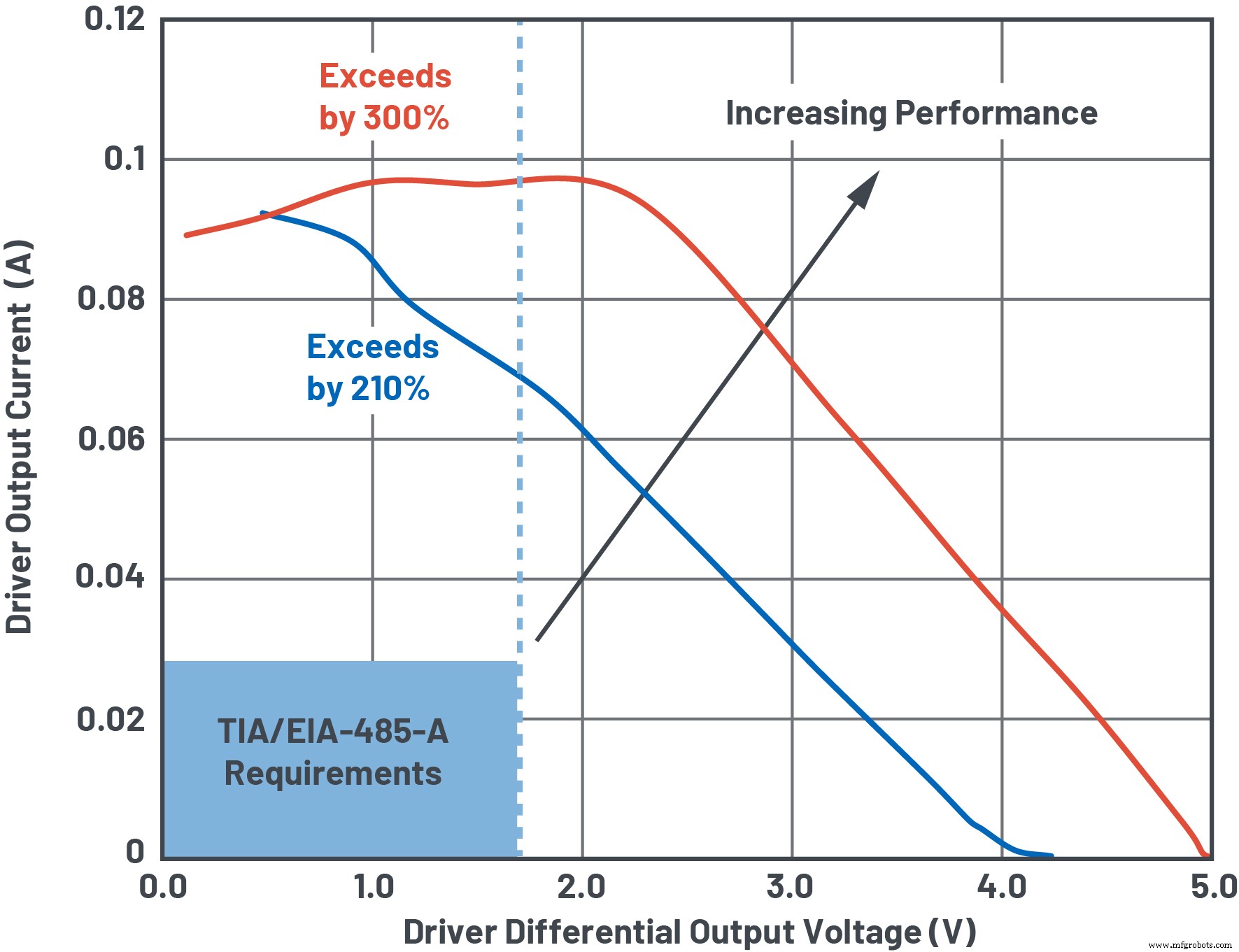
Figure 8. L'ADM3065E dépasse les exigences des variateurs RS-485 sur une large plage d'alimentation. (Source :Appareils analogiques)
La figure 9 illustre davantage ce point dans une application typique sur 1000 m de câble. Lors de la communication via un câble AWG 24 standard, un émetteur-récepteur amélioré est 30 % meilleur qu'un émetteur-récepteur RS-485 standard, avec une marge de bruit 30 % supérieure au nœud de réception, ou une augmentation de 30 % de la longueur maximale du câble à des débits de données faibles. Cette performance est bien adaptée aux applications d'infrastructure sans fil, où le câble RS-485 s'étend au-delà de plusieurs centaines de mètres.
cliquez pour agrandir l'image
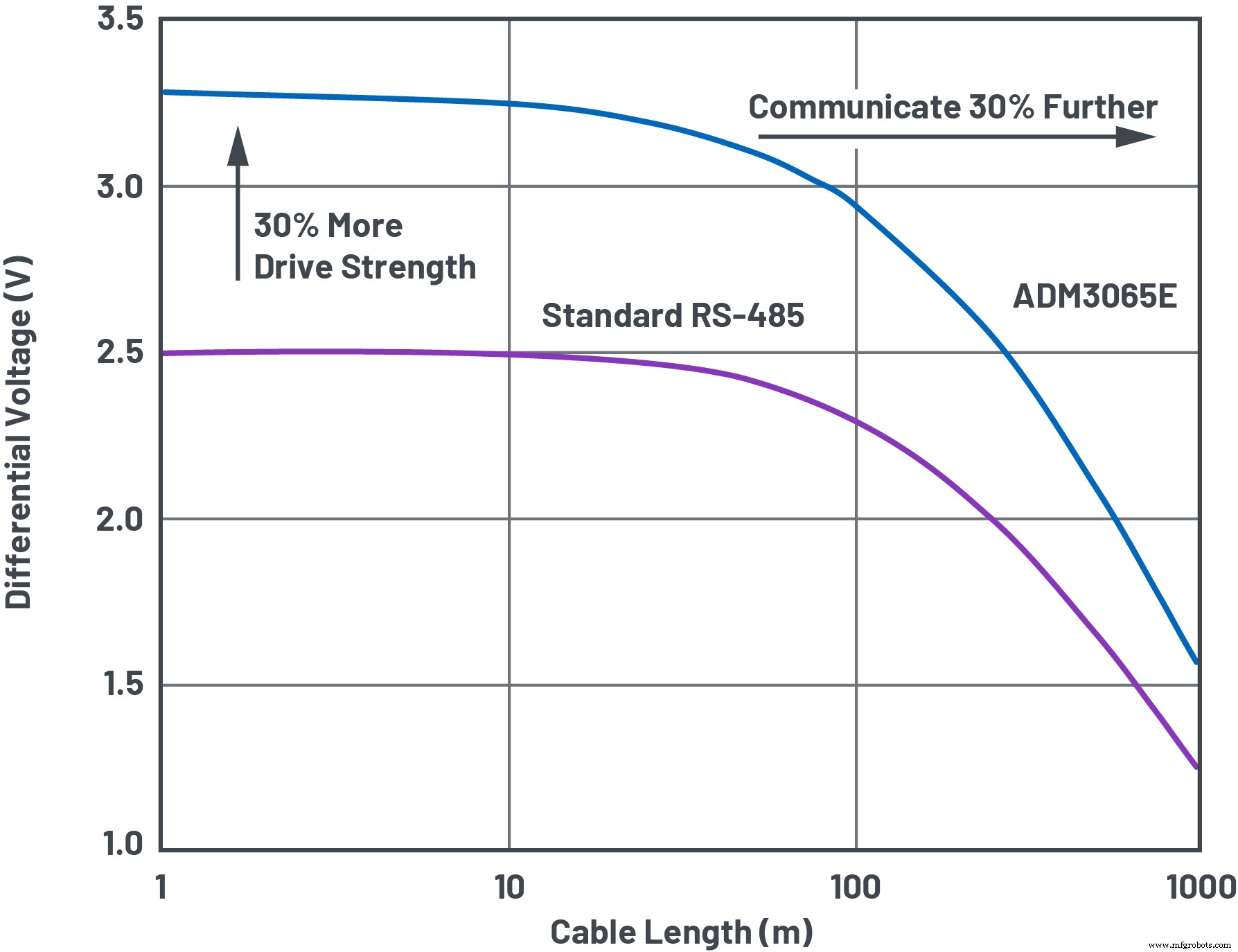
Figure 9. L'ADM3065E délivre un signal différentiel supérieur pour les très longues distances. (Source :Appareils analogiques)
Protection CEM et immunité au bruit
La signalisation RS-485 est équilibrée, différentielle et intrinsèquement insensible au bruit. Le bruit du système se couple de manière égale à chaque fil d'un câble à paire torsadée RS-485. Le câblage à paires torsadées fait circuler les courants de bruit induits dans des directions opposées, et les champs électromagnétiques couplés sur le bus RS-485 s'annulent. Cela réduit la susceptibilité électromagnétique du système. De plus, une plus grande puissance d'entraînement permet un meilleur rapport signal/bruit (SNR) dans les communications. Sur de longs câbles, tels que des centaines de mètres entre le niveau du sol et l'antenne sur les stations de base sans fil, le SNR amélioré ainsi qu'une excellente intégrité du signal garantissent un contrôle précis et fiable de l'inclinaison/de la position des antennes.
cliquez pour agrandir l'image
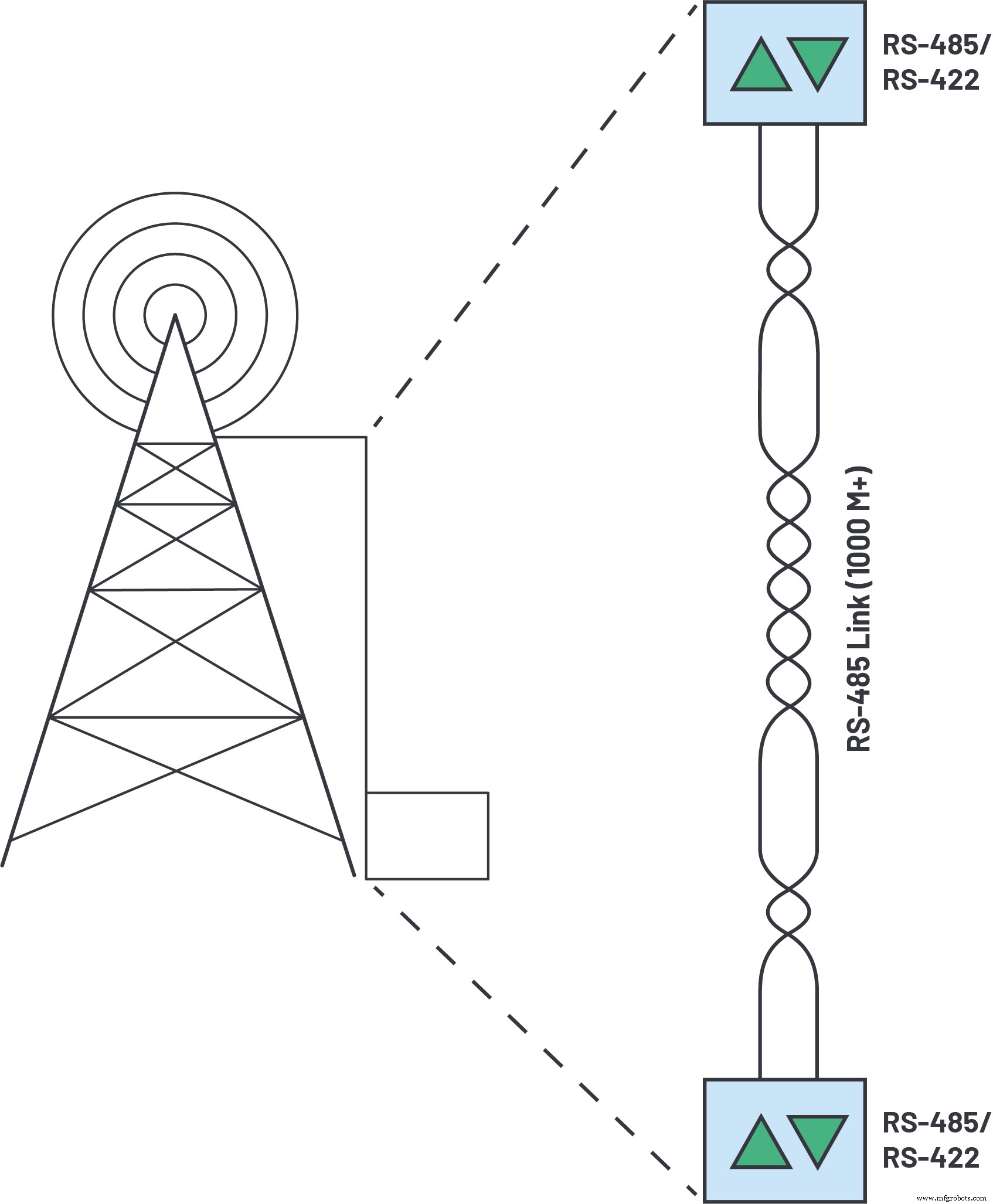
Figure 10. Les longueurs de câble d'infrastructure sans fil peuvent s'étendre sur des centaines de mètres. (Source :Appareils analogiques)
Comme indiqué dans la Figure 1, une protection CEM est requise pour les émetteurs-récepteurs RS-485 qui s'interfacent directement avec le monde extérieur via des connecteurs et des câbles adjacents. Par exemple, les décharges électrostatiques sur les connecteurs RS-485 exposés et le câblage de l'encodeur à l'entraînement du moteur constituent un risque système courant. La norme CEI 61800-3 au niveau du système relative aux exigences d'immunité CEM pour les systèmes d'entraînement de puissance électrique à vitesse réglable requiert une protection ESD minimale de ±4 kV contact/±8 kV air CEI 61000-4-2. Les émetteurs-récepteurs améliorés tels que l'ADM3065E dépassent cette exigence avec une protection ESD de ±12 kV/±12 kV dans l'air IEC 61000-4-2.
cliquez pour agrandir l'image
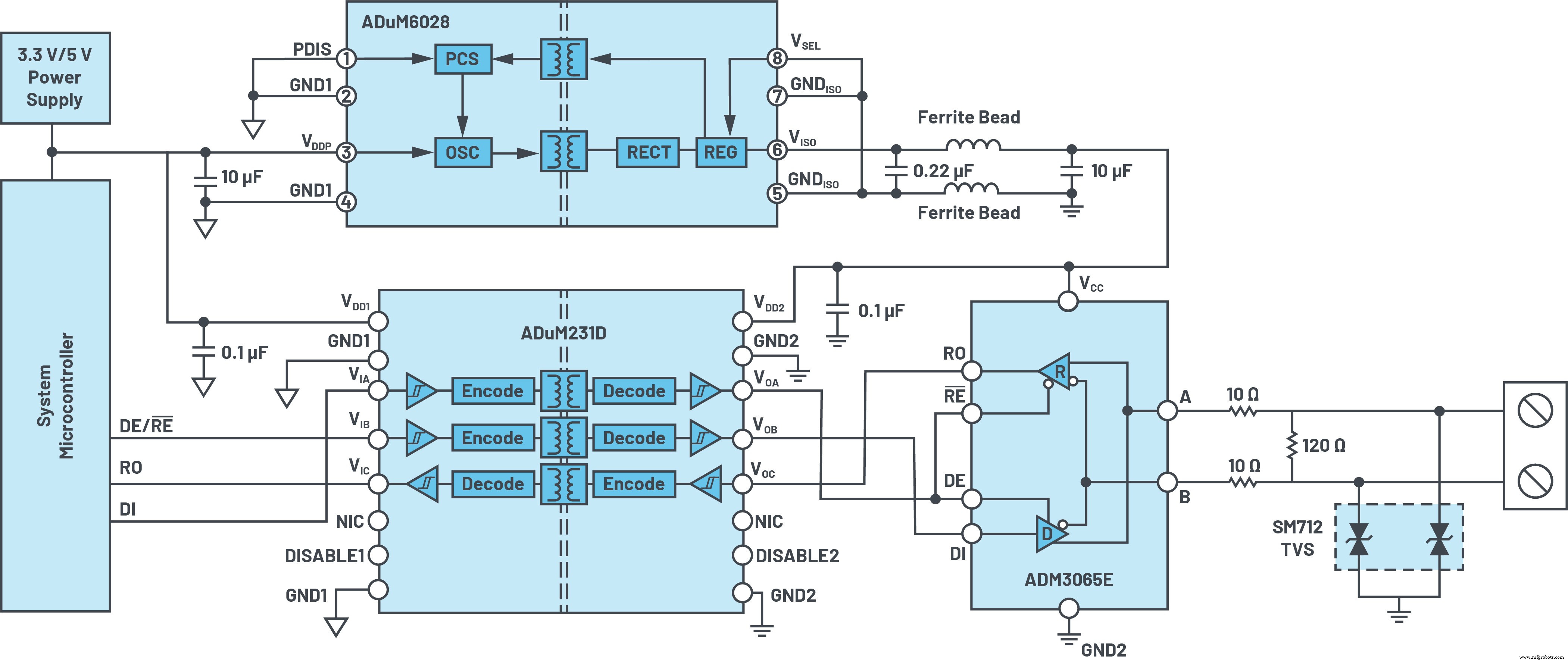
Figure 11. Solution complète RS-485 isolée du signal et de l'alimentation 25 Mbps avec protection ESD, EFT et contre les surtensions. (Source :Appareils analogiques)
Pour les applications d'infrastructure sans fil, une protection CEM améliorée est requise pour se protéger contre les surtensions de foudre dommageables. L'ajout d'un téléviseur SM712 et de deux résistances de coordination de 10 Ω aux entrées de l'émetteur-récepteur offre une protection CEM améliorée, avec une protection ESD jusqu'à ±30 kV 61000-4-2 et une protection contre les surtensions IEC 61000-4-5 de ±1 kV.
Pour augmenter l'immunité au bruit pour les applications de commande de moteur, d'automatisation de processus et d'infrastructure sans fil électriquement difficiles, il est possible d'ajouter une isolation galvanique. Une isolation galvanique, avec une isolation renforcée et une tension de tenue transitoire de 5 kV rms, peut être ajoutée à l'ADM3065E à l'aide de i d'Analog Devices Coupleur ® et iso Puissance ® La technologie. L'ADuM231D fournit les trois canaux requis d'isolation de signal de 5 kV rms, avec des performances de synchronisation de précision permettant un fonctionnement robuste à des débits allant jusqu'à 25 Mbps. Le convertisseur cc-cc isolé ADuM6028 fournit la puissance isolée requise avec une résistance nominale de 5 kV rms. Deux billes de ferrite sont utilisées pour répondre facilement aux normes de conformité CEM telles que la norme EN 55022 classe B/CISPR 22, résultant en une solution compacte isolée de CC à CC dans un facteur de forme de 6 mm × 7,5 mm.
Les émetteurs-récepteurs RS-485 de nouvelle génération surpassent les normes de l'industrie, offrant la possibilité de communiquer plus loin et plus rapidement par rapport aux appareils RS-485 standard. À des niveaux de gigue de 10 % spécifiés dans EnDat 2.2 5 , les systèmes peuvent fonctionner à une fréquence d'horloge de 16 MHz sur un maximum de 20 m de câblage, la norme RS-485 ayant du mal à répondre à cette exigence. Dépasse jusqu'à 300 % les exigences de conduite du bus RS-485 pour une meilleure fiabilité et une plus grande marge de bruit sur des câbles plus longs. L'immunité au bruit peut être améliorée en ajoutant i Isolation du coupleur, y compris l'isolateur de signal ADuM231D, et la solution d'alimentation isolée au facteur de forme le plus petit du secteur, l'ADuM6028.
Références
1 « Le nombre de nœuds PROFINET et PROFIBUS dépasse les 87 millions en 2018. » Groupe Profibus, mai 2019.
2 Conal Watterson. « Guide de mise en œuvre des circuits LVDS et M-LVDS ». Analog Devices, Inc., mars 2013.
3 « TIA/EIA-485-A, Caractéristiques électriques des générateurs et des récepteurs à utiliser dans les systèmes multipoints numériques équilibrés. » IHS Markit Inc., mars 1998.
4 « TIA/EIA-568-B.2, Norme de câblage des télécommunications des bâtiments commerciaux—Partie 2 :Composants de câblage à paires torsadées équilibrées. » Association de l'industrie des télécommunications, mai 2001.
5 "EnDat 2.2—Interface bidirectionnelle pour les encodeurs de position." Heidenhain, septembre 2017.
Embarqué
- Stocker et gérer les données sensibles avec Secret Manager
- MODULE DE DONNÉES :moniteurs à cadre ouvert de grande taille avec une luminosité élevée et une fonction easyTouch
- Micropuce :ADC 24 bits et 16 bits avec des débits de données jusqu'à 153,6 kSPS
- Apacer :série de SSD SV250 de qualité industrielle avec des vitesses de lecture/écriture de 560 et 520 Mo/s
- Arrow s'associe à ADLINK et Microsoft pour permettre un déploiement plus rapide des solutions Industrial IoT
- Contrinex :capteurs intelligents et barrières immatérielles de sécurité compatibles avec le cloud avec interface Bluetooth
- Des données au graphique :un parcours Web avec Flask et SQLite
- Conception et fabrication plus rapides avec Formlabs et Fusion 360
- Que dois-je faire avec les données ? !