


XANDAR vise la génération de code dans la conception multicœur critique pour la sécurité
La prochaine génération de systèmes embarqués en réseau nécessite un prototypage rapide et des performances élevées tout en conservant des qualités clés telles que la fiabilité et la sécurité. Cependant, le déploiement de systèmes embarqués critiques pour la sécurité souffre de chaînes d'outils logicielles et de processus d'ingénierie complexes. En outre, la tendance actuelle des systèmes autonomes reposant sur des applications d'apprentissage automatique (ML) et d'intelligence artificielle (IA) en combinaison avec des exigences opérationnelles en cas d'échec rend la vérification et la validation de ces nouveaux systèmes un défi.
Pour résoudre ce problème, un projet de trois ans financé par l'Union européenne appelé XANDAR vise à fournir une chaîne d'outils logiciels mature (de la capture des exigences à l'intégration réelle du code sur la cible, y compris la vérification et la validation) répondant au besoin de prototypage rapide de systèmes embarqués interopérables et autonomes. .
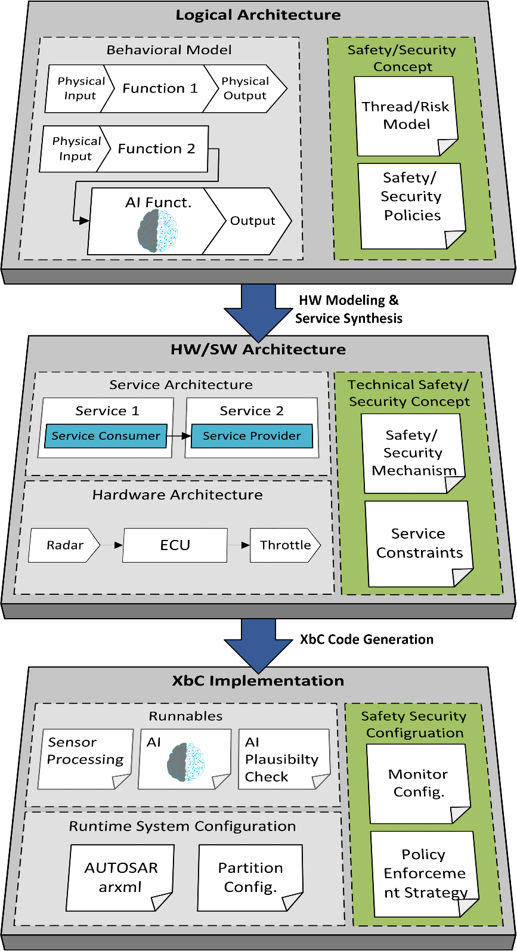
En partant d'une architecture système basée sur des modèles, XANDAR tirera parti de nouvelles techniques de synthèse automatique de modèles et de parallélisation logicielle pour répondre à des exigences non fonctionnelles spécifiques, jetant les bases d'une nouvelle conception en temps réel, de sûreté et de sécurité par construction (X-by -Construction, ou paradigme XbC).
Le défi multicœur dans les environnements critiques pour la sécurité
L'ère du traitement parallèle a propulsé les architectures multicœurs dans le courant dominant, conduisant à une situation dans laquelle elles sont utilisées dans presque tous les domaines d'application. Les défis initiaux liés à la programmation d'architectures multicœurs, principalement liés à la synchronisation et aux conditions de concurrence entre les threads d'exécution parallèles, ne sont toujours pas entièrement résolus.
Bien que la situation soit atténuée par la parallélisation des compilateurs, des langages parallèles, des constructions de langage spéciales et de l'expérience globale croissante des développeurs de logiciels qui s'habituent au nouveau paradigme de la programmation, dans les domaines critiques pour la sécurité, le multicœur n'a pas encore réussi. Dans des environnements tels que l'automobile ou l'aérospatiale, la vérification et la preuve d'un fonctionnement sans erreur sont essentielles, en conflit avec la complexité supplémentaire et les nouvelles sources d'erreur dans la programmation multicœur.

Dans ce contexte, la conception basée sur un modèle peut s'avérer apporter les réponses et combler le fossé qui sépare la programmation actuelle de l'architecture multicœur et les exigences des domaines critiques pour la sécurité.
La conception de fonctions de contrôle basée sur un modèle a suscité un intérêt croissant au cours des deux dernières décennies, en particulier dans les industries de l'aérospatiale, de l'automobile et des procédés, qui utilisent de plus en plus l'électronique et les logiciels embarqués. La principale raison de cette tendance est la possibilité de gérer le processus de développement d'un point de vue de niveau supérieur, faisant ainsi abstraction de la conception de bas niveau des systèmes tout en permettant la simulation du comportement du système et la génération de code des fonctions modélisées. Cela se traduit par une réduction du temps et des coûts de développement.
Alors que la conception basée sur un modèle est de plus en plus adoptée pour les premières spécifications de système, la modélisation structurelle et l'exploration de l'espace de conception, la mise en œuvre logicielle finale pour les systèmes embarqués critiques est souvent encore développée manuellement.
Des solutions de bout en bout qui prennent en compte les aspects de sécurité uniques pour un système embarqué isolé ont été développées dans des projets de recherche récents comme ARGO, qui se concentre sur la génération de code compatible WCET (pire temps d'exécution). Des approches d'ingénierie des systèmes basées sur des modèles vers des architectures électriques/électroniques ont également été établies ces dernières années. Ils divisent l'architecture en plusieurs couches d'abstraction et points de vue pour gérer la complexité tout au long du processus de développement, de l'analyse et de la conception à la production en série. Les principales raisons peuvent être considérées comme analogues à la conception de fonctions basée sur un modèle, mais du point de vue de l'architecture et du système.
Le développement basé sur un modèle de chaque domaine sont généralement des processus en cours d'exécution distincts, où les décisions architecturales et les informations doivent être modélisées manuellement dans l'outil de conception de fonction basé sur un modèle ou vice versa. Bien que des formats d'échange existent pour les aspects individuels d'un système tels que les matrices de communication, les processus d'import/export ont tendance à être sujets aux erreurs, ce qui provoque des incohérences entre l'architecture et le modèle comportemental complémentaire, en particulier lorsque l'on considère la collaboration distribuée et simultanée sur les modèles.
Les approches et recherches existantes modifient les modèles architecturaux avec des descriptions comportementales simples de machines à états finis et traitent de la génération de spécifications d'architecture exécutables pour la vérification basée sur la simulation. Cependant, cela doit être développé davantage dans une approche holistique capturant toutes les étapes de conception et de vérification dans un environnement de développement intégré à l'aide d'un méta-modèle à source unique.
Cela inclut, en particulier, la modélisation de l'architecture des systèmes embarqués distribués en réseau, sa modélisation comportementale intégrée détaillée, sa synthèse dans un modèle de simulation multicouche ainsi que les étapes de vérification nécessaires et la génération de code ultérieure.
XANDAR s'efforce de réaliser une telle approche holistique dans laquelle le générateur de code fournit les garanties X-by-construction (XbC) requises et préserve les propriétés non fonctionnelles pertinentes du modèle d'entrée. XANDAR introduira de nouvelles innovations dans ce domaine en fournissant un support de génération de code indépendant de la plate-forme, y compris la génération d'exécutables de surveillance pour les services critiques ainsi que des accélérateurs non déterministes pour les applications d'IA et de ML.
Relever ces défis nécessite de nouveaux concepts, des algorithmes de décision automatisés, des contrôles formels et des optimisations de programme non seulement pour les performances et l'efficacité énergétique, mais aussi pour les garanties non fonctionnelles. L'ensemble du processus est soumis à un compromis entre performances en temps réel, efficacité énergétique, garanties non fonctionnelles et flexibilité à l'exécution. Les générateurs de code et les transformations de haute qualité qui co-optimisent tous ces aspects nécessitent des solutions nouvelles et spécialisées.
Partenaires du consortium XANDAR
Le projet XANDAR est un programme de trois ans se terminant en décembre 2023 et financé par l'UE à hauteur de 5 millions d'euros dans le cadre d'Horizon 2020. Les partenaires du consortium issus de l'industrie et du milieu universitaire, dirigé par le professeur Jürgen Becker de l'Institut de technologie de Karlsruhe, sont :
- Institut de technologie de Karlsruhe (Allemagne)
- Université du Péloponnèse (Grèce)
- Centre aérospatial allemand
- AVN Innovative Technology Solutions Ltd (Chypre)
- Vector Informatik GmbH (Allemagne)
- Université Queen's de Belfast (Irlande du Nord)
- Groupe BMW (Allemagne)
- fensISS (Espagne)
L'un des huit partenaires du consortium XANDAR est Vector. La société contribue à l'atteinte des objectifs ambitieux du projet en s'appuyant sur son expertise de spécialiste des logiciels embarqués et sur ses environnements de développement performants PREEvision et TA Tool Suite.
Ici, PREEvision permet de spécifier des systèmes embarqués connectés de manière collaborative et basée sur des modèles avec une sémantique bien définie qui intègre tous les niveaux du système. La suite d'outils TA peut être utilisée pour spécifier, simuler et valider le comportement temporel de systèmes temps réel complexes. Les deux environnements fournissent une base pour la mise en place du cadre de conception X-by-Construction.
Embarqué
- Une taxonomie pour l'IIoT
- Conception de commandes de moteurs pour systèmes robotiques
- Le capteur Hall cible les systèmes automobiles critiques pour la sécurité
- Kontron et SYSGO :plate-forme informatique SAFe-VX pour les systèmes critiques pour la sécurité
- 5 conseils pour la conception de tôlerie
- Avantages des technologies embarquées pour la conception modulaire
- Conception pour la fabrication de PCB
- Top 10 des flux de travail pour les fabricants
- Considérations relatives à la conception de l'éclairage pour les systèmes de vision en chirurgie robotique