


Étude de cas :Améliorer le flux de travail de la fabrication additive
L'amélioration de votre flux de travail logiciel peut vous faire gagner des minutes vitales sur votre processus d'impression 3D. Voici comment les chercheurs ont amélioré le workflow de fabrication additive avec RoboDK.
Lorsque vous imprimez en 3D avec un robot, votre flux de travail logiciel peut avoir un impact important sur votre productivité. Si vous pouvez gagner ne serait-ce que quelques minutes sur le flux de travail, au fil du temps, cela pourrait se traduire par une productivité supplémentaire considérable.
Le temps qu'il vous faut pour basculer entre différents progiciels est généralement court, mais cela rend votre flux de travail moins fluide et, par conséquent, peut rendre la fabrication additive moins efficace.
Des chercheurs du Portugal et de Norvège ont récemment développé une application pour rationaliser encore plus le flux de travail de fabrication additive de RoboDK via l'API RoboDK.
Rencontrez les chercheurs
Cette application d'ingénierie a été développée pour une étude menée par les chercheurs Filipe Monteiro Ribeiro et J. Norberto Pires de l'Université de Coimbra, au Portugal, et Amin S. Azar de SINTEF, le principal centre norvégien de recherche sur la fabrication.
L'étude, intitulée "Implémentation d'une architecture de contrôle de robot pour les applications de fabrication additive" a été publié plus tôt cette année dans la revue Industrial Robot.
Qu'est-ce que les chercheurs essayaient de réaliser ?
RoboDK est un excellent moyen d'ajouter la robotique à la fabrication additive. Nous avons déjà vu des gens l'utiliser pour imprimer un large éventail d'objets, y compris des structures en béton imprimées en 3D, des œuvres d'art imprimées en 3D et des aliments imprimés en 3D.
Le flux de travail d'impression 3D est déjà assez bon dans RoboDK :il vous suffit de générer le GCODE avec un logiciel de découpage (généralement le Slic3r open source), puis de charger le chemin résultant dans RoboDK.
Cependant, l'équipe de chercheurs a identifié que RoboDK seul ne fournit pas le flux de travail le plus rationalisé possible. Leur étude décrit un programme qu'ils ont développé pour combiner directement les capacités de RoboDK et Slic3r sans avoir à déplacer manuellement les fichiers G-code entre les deux programmes.
Pour y parvenir, l'équipe a développé un programme graphique utilisant Python et l'API RoboDK.
Les objectifs de cette étude étaient :
- Développer une simulation de fabrication additive — C'est particulièrement facile avec RoboDK, qui fournit un environnement intuitif pour la simulation de robots. L'équipe a également ajouté un programme Python simple pour simuler le dépôt de matériel imprimé en 3D, car ce n'est pas quelque chose que RoboDK simule actuellement lui-même.
- Pour permettre la simulation hors ligne de robots — Selon les chercheurs, il s'agissait d'une partie essentielle de leur application car l'utilisation d'un environnement virtuel réduisait le risque d'endommagement d'un robot réel. RoboDK permet de transformer très facilement le programme du robot simulé en code pour le vrai robot via ses nombreux post-processeurs.
- Fonctionnement asynchrone — Il était important pour l'équipe que le programme créé n'interfère pas avec le fonctionnement du robot simulé dans RoboDK. Par exemple, la simulation devrait continuer à s'exécuter lorsque le programme chargeait un nouveau modèle dans Slic3r. Ceci est facile à réaliser en utilisant notre module robolink Python, qui fournit un lien asynchrone entre RoboDK et n'importe quel programme Python.
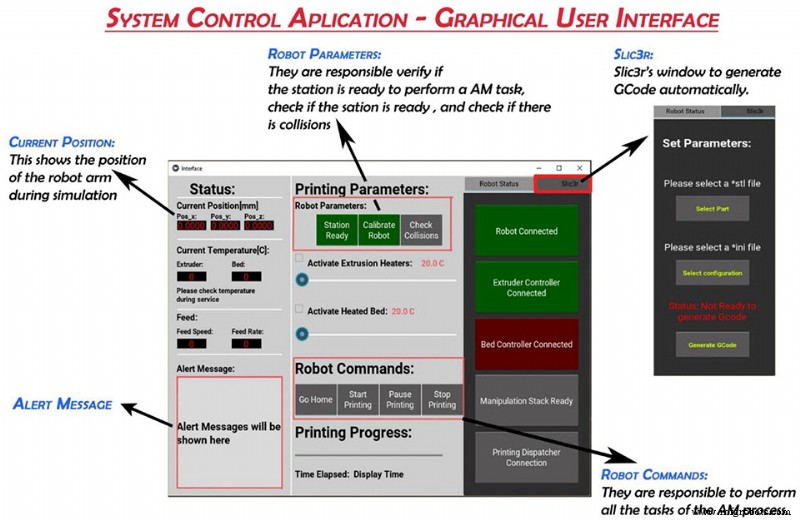
Le programme résultant se situe entre Slic3r et RoboDK et coordonne le processus de fabrication additive.
Qu'est-ce que l'étude a démontré ?
L'application de l'équipe a très bien utilisé les capacités de RoboDK. En particulier, ils ont démontré à quel point il peut être efficace d'utiliser l'API pour combiner des parties de votre propre flux de travail.
L'API RoboDK est une partie très puissante de RoboDK, mais elle n'est pas utilisée par beaucoup de nos utilisateurs. Ceci est regrettable car cela peut aider à améliorer considérablement la fluidité du flux de travail de programmation de votre robot. Il prend en charge plusieurs langages de programmation, mais la bibliothèque Python utilisée par les chercheurs est particulièrement facile à utiliser — en supposant, bien sûr, que vous aimiez le langage de programmation Python (et pourquoi pas vous ? C'est un langage si simple !).
L'avantage du fonctionnement asynchrone
L'un des aspects clés de l'étude était le fonctionnement asynchrone. Il était important pour l'équipe de s'assurer qu'aucune partie du programme n'arrêterait le fonctionnement d'une autre partie du programme.
RoboDK fonctionne déjà de manière asynchrone - vous pouvez exécuter plusieurs scripts Python en même temps et ils n'interféreront pas les uns avec les autres - mais l'équipe avait besoin de son propre programme pour avoir également cette capacité asynchrone.
Par exemple, ils ne voulaient pas que leur programme "se bloque" en attendant que Slic3r finisse de générer GCODE. Ils devaient pouvoir contrôler le robot pendant que le programme faisait autre chose. Ils y sont parvenus avec l'asyncio bibliothèque pour Python qui est une option populaire pour la programmation simultanée.
Comment améliorer votre propre flux de travail avec l'API
Bien que l'étude ait été réalisée par des chercheurs en robotique, ne pensez pas que cela signifie que la programmation avec l'API RoboDK est compliquée. Même si vous n'êtes pas un assistant de programmation, vous pouvez facilement utiliser l'API vous-même.
Si vous souhaitez développer votre propre programme pour booster votre flux de travail, vous pouvez suivre les étapes suivantes :
- Se familiariser avec l'API via la page de documentation. Découvrez ses fonctionnalités et réfléchissez à l'utilisation que vous pourriez en faire dans votre application.
- Planifiez les parties de votre application que vous allez coder dans le programme externe.
- Créez votre programme à l'aide de l'API pour interagir avec RoboDK.
- Testez votre programme avant de l'intégrer à votre processus.
Bien sûr, vous n'avez pas besoin d'écrire votre propre code pour améliorer votre flux de travail. Vous pouvez également utiliser les plugins RoboDK pour des programmes tels que SolidWorks qui rationalisent également le flux de travail lorsque vous utilisez d'autres programmes en conjonction avec RoboDK.
Mais, comme l'a montré l'équipe de chercheurs, l'API peut être très efficace pour lisser les parties disparates de votre flux de travail pour les logiciels qui n'ont pas encore de plug-in.
N'oubliez pas que même gagner quelques minutes sur votre processus de programmation peut entraîner une productivité supplémentaire à long terme.
Que pourriez-vous obtenir en utilisant l'API dans votre processus ? Dites-le nous dans les commentaires ci-dessous ou rejoignez la discussion sur LinkedIn , Twitter , Facebook, Instagram ou en le forum RoboDK .
Robot industriel
- Impression 3D vs fabrication additive :quelle est la différence ?
- La valeur de la fabrication additive dans l'industrie automobile
- Quelle est l'analyse de rentabilisation du système d'exécution de fabrication additive dans la production de pièces de rechange ?
- L'évolution vers de véritables processus hybrides dans la fabrication additive
- La technologie de fabrication hybride est-elle l'avenir de la fabrication additive ?
- Les arguments en faveur du rapatriement de la fabrication américaine
- Le cas de l'impression 3D dans le secteur manufacturier
- L'impact de la fabrication additive sur la production industrielle
- Les principaux types de fabrication additive