


Instruments de vol DIY pour Horizon et boussole
Composants et fournitures
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Applications et services en ligne
 |
|
À propos de ce projet
Aujourd'hui, nous allons créer notre propre simulateur de vol personnalisé à l'aide d'un capteur de mouvement MPU-6050 !!!
Qu'est-ce qu'un capteur MPU-6050 ? Les appareils MPU-6050 combinent un gyroscope à 3 axes et un accéléromètre à 3 axes sur la même puce de silicium, avec un processeur de mouvement numérique (DMP) intégré , qui traite les complexes 6 axesMotionFusion algorithmes. Donc, maintenant vous allez pouvoir déchiffrer la signification de 6DOF-6 degrés de liberté.
"Ces appareils MotionTracking sont conçus pour les exigences de faible consommation, de faible coût et de haute performance des smartphones, des tablettes et des capteurs portables."
Des trucs dont nous avons besoin...
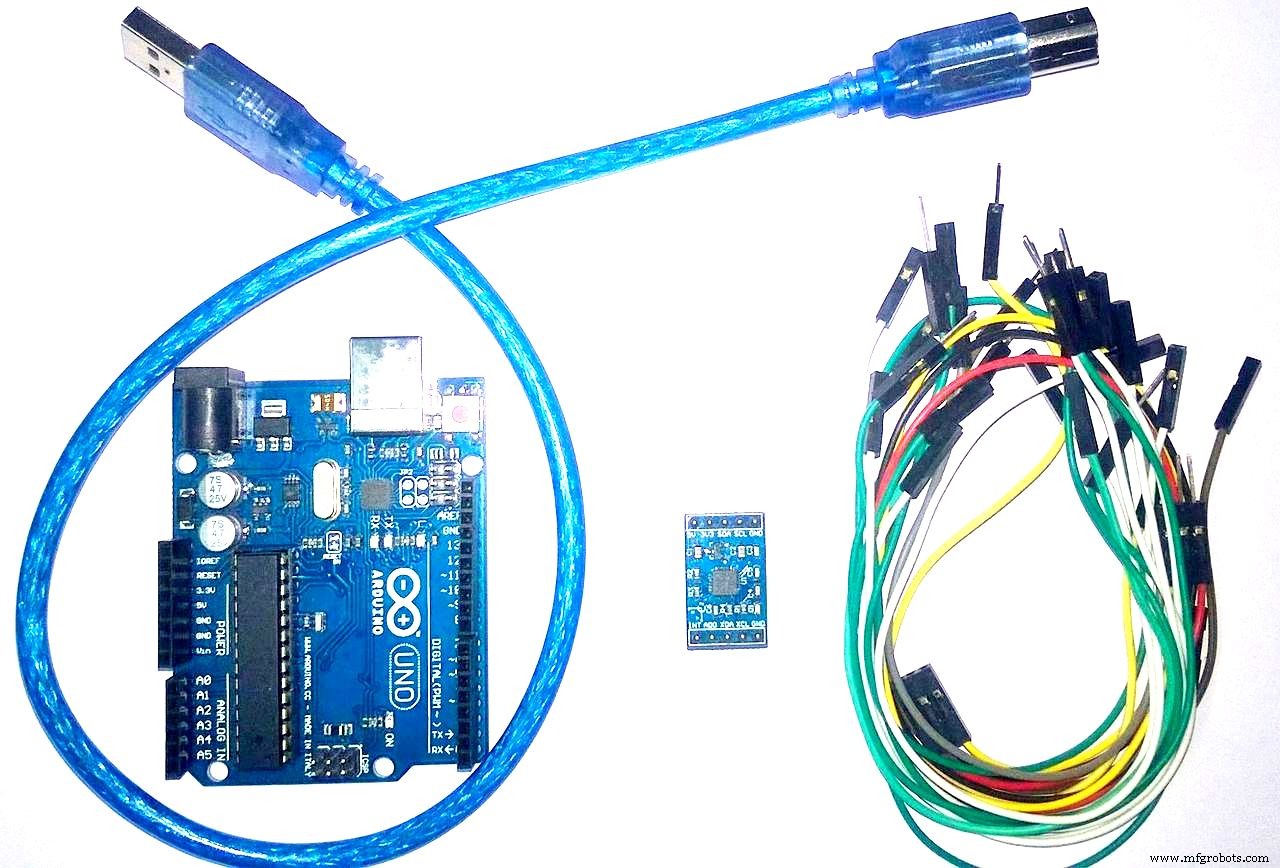
Composants matériels :
- 1) Arduino/Genuino UNO (Toute carte Arduino fera l'affaire)
- 2) MPU-6050 Capteur IMU (unité de mesure inertielle) avec 6 degrés de liberté
- 3) Câbles de connexion
Logiciels :
- Arduino
- Traitement
Avant de plonger dans la partie codage, assemblons nos kits de matériel.
Pour plus de détails sur le schéma de connexion et la configuration matérielle, veuillez vous reporter à mon blog précédent. J'ai également joint le schéma de connexion dans ce projet, pour vos conseils rapides.
Après avoir configuré les composants selon le schéma de connexion, passons au logiciel de traitement, qui facilitera la visualisation 3D de ce capteur de mouvement.
"Traitement IDE "
Étant donné que vous avez déjà installé ArduinoIDE, l'implication de deux IDE distincts dans un même projet peut vous rendre un peu confus. Eh bien, il n'y a pas lieu de paniquer. Suivez les étapes ci-dessous et tous vos doutes seront dissipés !
Le traitement est assez similaire à ArduinoIDE à l'exception de quelques fonctions spécialisées. Ainsi, vous verrez une influence/similitude dans ProcessingIDE.
Les figures 2 et 3 rendront mes déclarations claires.

Ainsi, nous voyons qu'il y a une similitude visuelle étonnante dans ces deux IDE.
Ici, nous allons lire des degrés en trois dimensions qui sont Phi , Thêta , psi sur MPU6050 en utilisant le moniteur série de Processing IDE.
Téléchargez le code Arduino, joint à la fin de ce tutoriel.
S'il y a un problème avec la compilation du code, vérifiez si vous avez installé MPU et la bibliothèque i2c. Vous pouvez trouver ici : http://playground.arduino.cc/Main/MPU-6050
Après avoir effectué ces étapes, il est temps de télécharger le code "Traitement". Le code a été attaché après plusieurs tests et modifications, et ainsi, vous n'avez rien à modifier dans le code.
Démonstration :
En cas de questions, veuillez commenter ci-dessous.
Code
Codes de simulation de vol
Dans ce référentiel, vous trouverez le code pour ArduinoIDE et ProcessingIDE. https://github.com/AritroMukherjee/FlightSimulatorCodesSchémas
Connectez votre capteur IMU à Arduino en conséquence.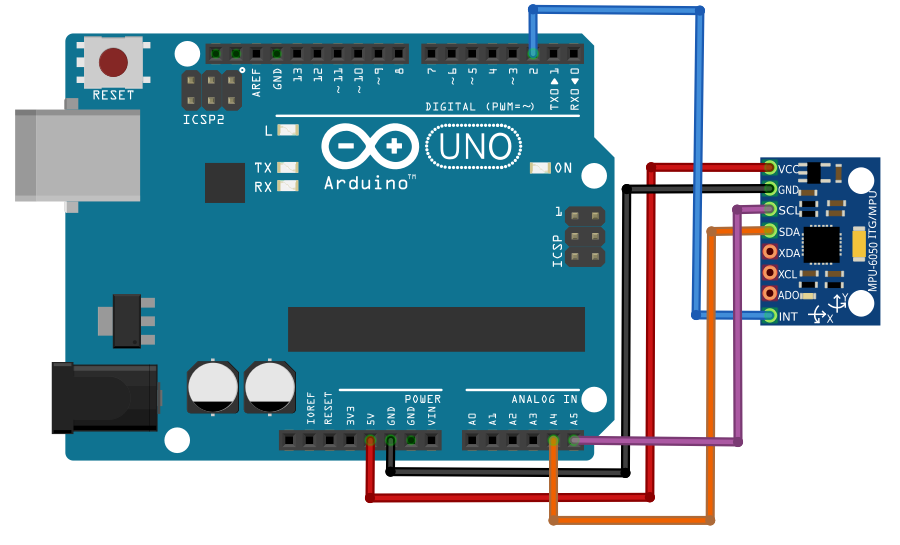
Processus de fabrication
- Capteur Arduino - Types et applications
- Capteur de boussole – Fonctionnement et applications
- DIY :surveillance et régulation de la température pour HomeBrew
- Système de capteur de mouvement infrarouge DIY pour Raspberry Pi
- Panneau LCD avec Arduino pour Flight Simulator
- Capteur DHT11 avec LED et haut-parleur piézo
- Voltmètre DIY utilisant Arduino et Smartphone
- Capteur de rythme cardiaque infrarouge DIY utilisant Arduino
- Comment faire une boussole en utilisant Arduino et Processing IDE