


Armement robot avec manette
Composants et fournitures
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 |
Applications et services en ligne
 |
|
À propos de ce projet
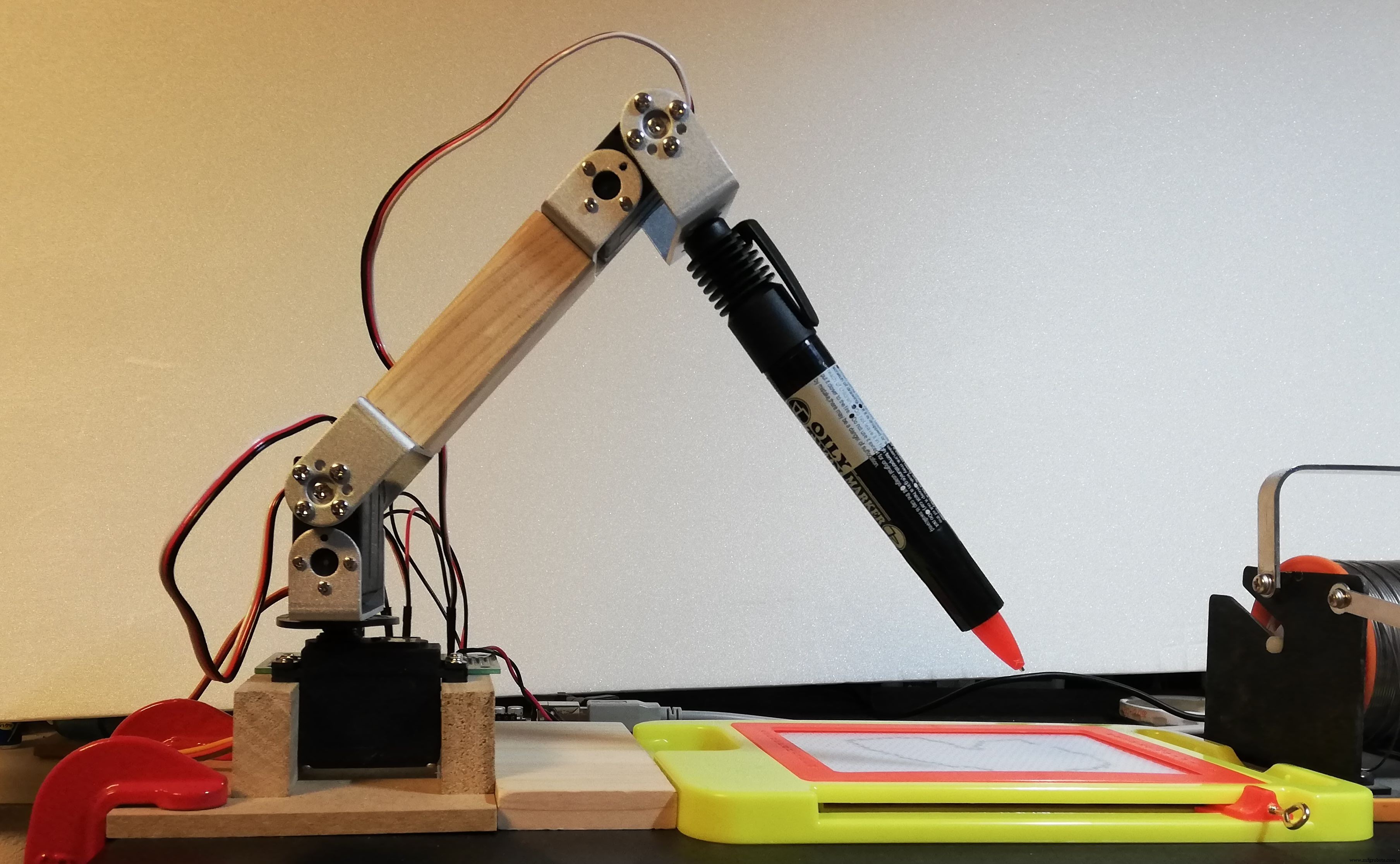
J'ai fabriqué le bras obot et son contrôleur.
Constitution
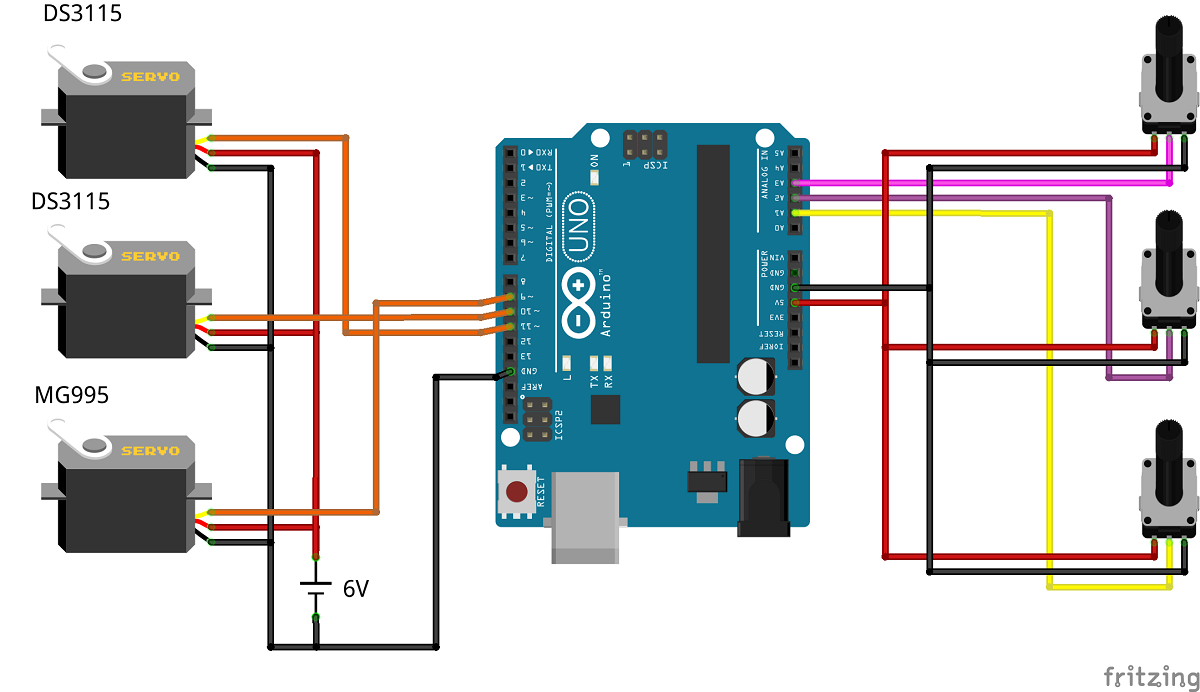
Le bras du robot utilise trois servos PWM conventionnels et chaque angle est contrôlé par une résistance variable. Le potentiomètre rotatif utilisait la courbe B 10k ohm.
Production de bras de robot
Deux servomoteurs DS3115 ont été utilisés dans le sens vertical et le servomoteur MG995 a été utilisé dans le sens de rotation.
Contrôleur de production
J'ai fabriqué un boîtier de contrôleur avec une imprimante 3D.
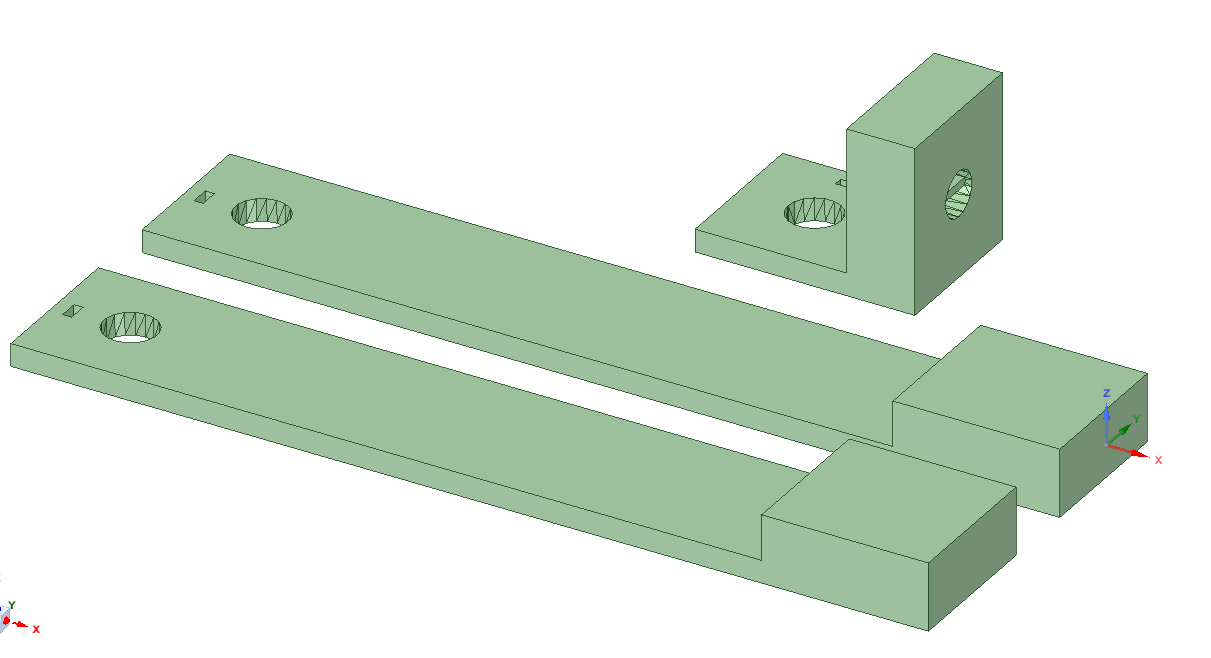
Un trou et un trou de positionnement pour visser à travers le bouton du potentiomètre rotatif, ainsi qu'un enfoncement pour insérer le bouton sont fournis.

Assemblez les pièces fabriquées et trois potentiomètres rotatifs pour terminer !
Le potentiomètre rotatif est maintenant placé dans le même sens que l'axe de rotation du servomoteur du bras du robot !
Code Arduino
Ce code simple lit simplement la valeur du potentiomètre rotatif avec une broche analogique, la convertit en un angle et l'entre dans le servo correspondant.
#include
Servo myservo1, myservo2, myservo3;
float th1=90.0,th2=90.0,th3=90.0;
float val1, val2, val3;
configuration vide() {
Serial.begin(9600);
myservo1.attach(9, 500, 2420); //MG995
monservo2.attach (10, 820, 2140); //DS3115
monservo3.attach(11, 820, 2140); //DS3115
set_servo();
}
boucle vide() {
val1 =analogRead(A1);
val2 =analogRead(A2);
val3 =analogRead(A3);
th1 =map(val1, 170.0, 880.0, 0.0, 180.0);
if(th1>=180.0){
th1 =180.0;
}else if(th1 <=0.0){
th1 =0.0;
}
th2 =map(val2, 150.0, 860.0, 0.0, 180.0);
if(th2>=180.0){
th2 =180.0;
}else if(th2 <=0.0){
th2 =0.0;
}
th3 =map(val3, 860.0, 160.0, 0.0, 180.0);
if(th3>=180.0){
th3 =180.0;
} else if(th3 <=45.0){
th3 =45.0;
}
set_servo();
}
void set_servo( ){
monservo1.write(th1) ;
monservo2.write(th2) ;
monservo3.write(th3) ;
}
Opération
Complétez en câblant le potentiomètre rotatif et en le connectant à Arduino !
Pièces et boîtiers personnalisés
Processus de fabrication
- Un robot mobile avec un évitement d'obstacles basé sur la vision
- Robot contrôlé par le Web Raspberry Pi avec vidéo
- Robot Pi simple
- Robot SCARA à double bras
- Robot de désinfection avec des lumières ultraviolettes
- Unopad - Contrôleur MIDI Arduino avec Ableton
- Centre de tournage équipé d'un bras robotisé
- Le robot associe un bras robotisé collaboratif à une plate-forme mobile
- Le mouvement servo améliore les opérations du robot