


Baromètre Arduino
Composants et fournitures
 |
| × | 1 | |||
 |
| × | 1 |
À propos de ce projet
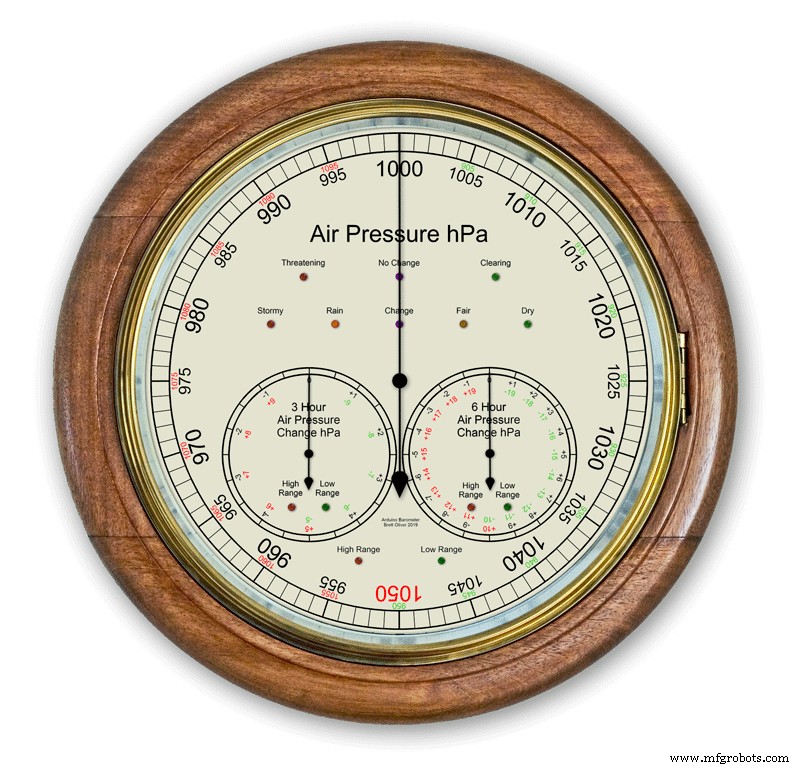
Utilisation d'un Arduino UNO et d'un Nano pour afficher la pression de l'air sur un écran analogique de 12" (300 m) à l'aide de 3 moteurs pas à pas.
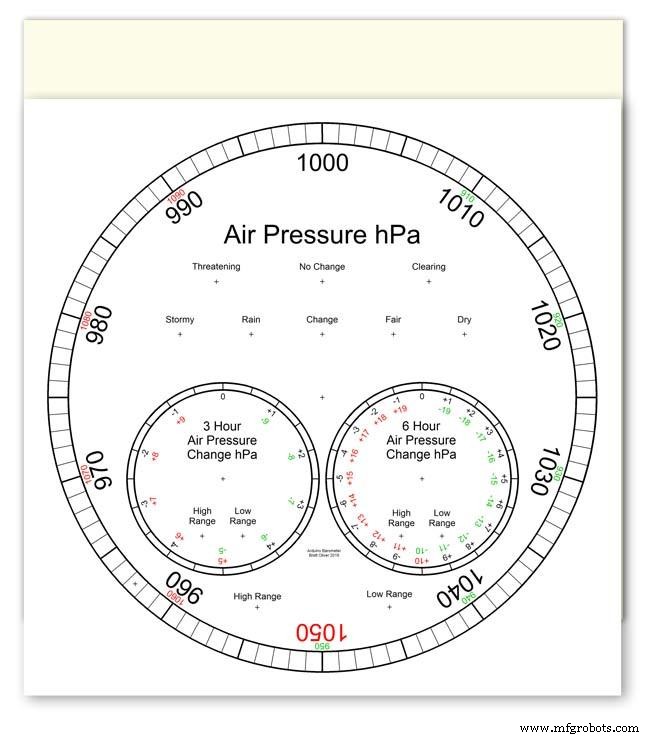
Il y a un choix de 2 modèles de cadrans modernes et classiques.
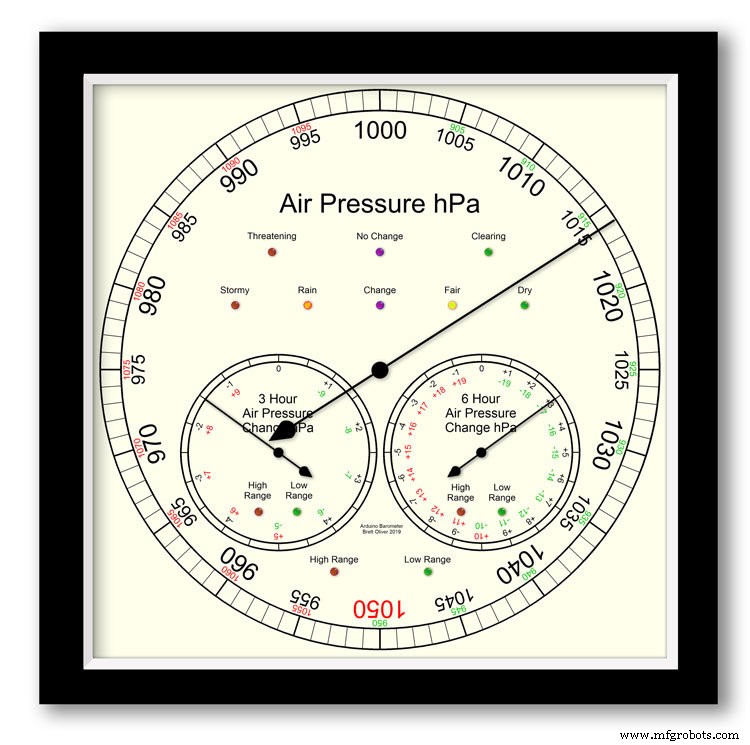
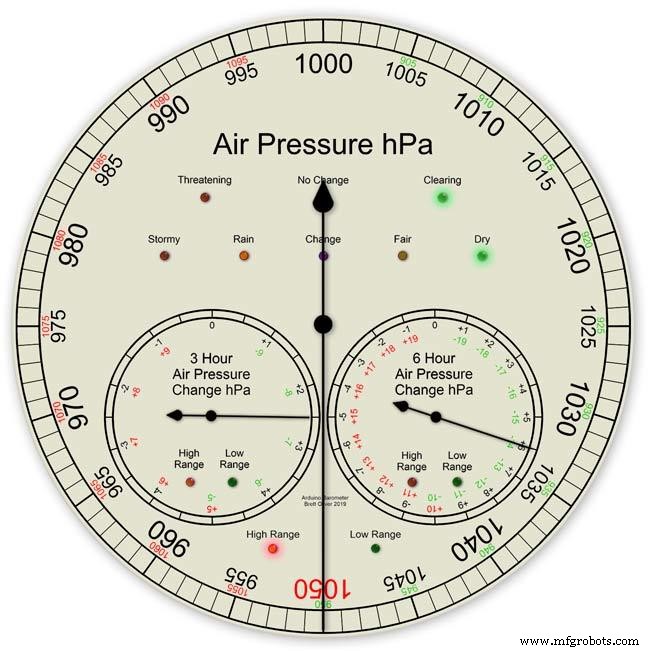
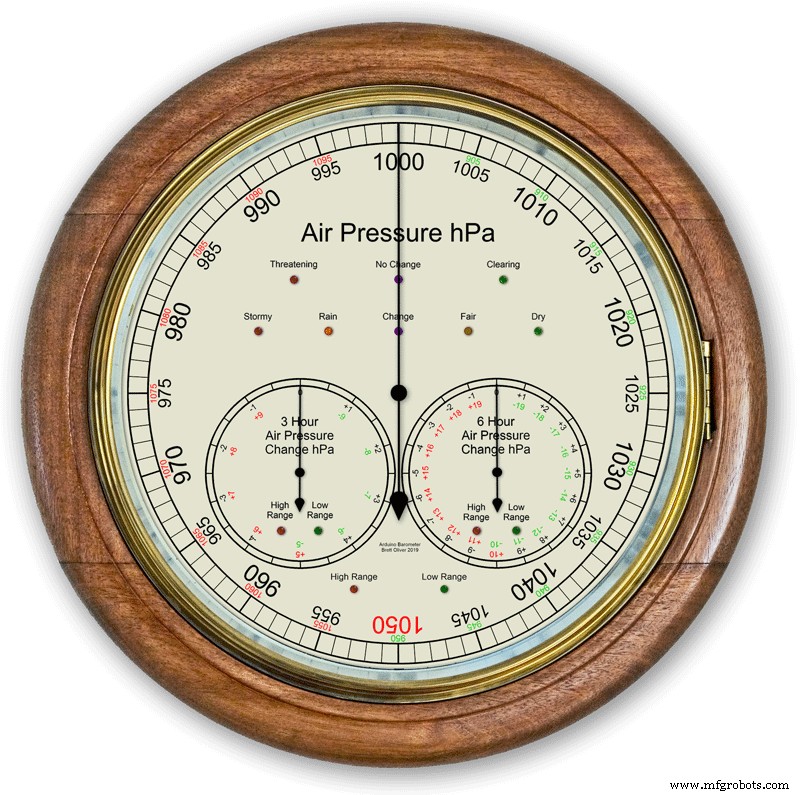
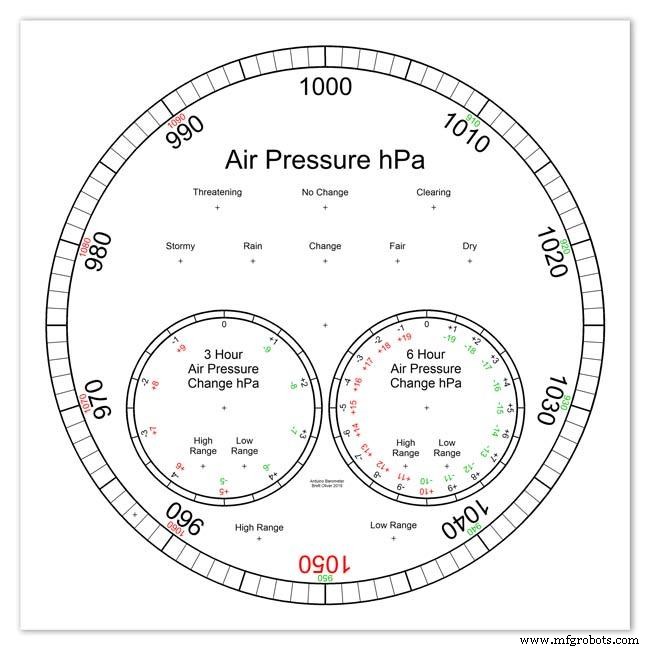
La pression atmosphérique en hPa (hectopascal) est affichée sur le grand cadran principal et est mise à jour toutes les 10 minutes.
Il y a 2 cadrans secondaires, l'un indique le changement de pression des 6 dernières heures et l'autre le changement de pression des 3 dernières heures.
Le cadran de 3 heures a une résolution accrue de 0,5 hPa car il est utilisé pour les prévisions météorologiques. Il y a des LED pour montrer quand la portée étendue est utilisée sur les trois écrans et aussi des LED pour indiquer les prévisions météorologiques sur l'affichage de 3 heures.
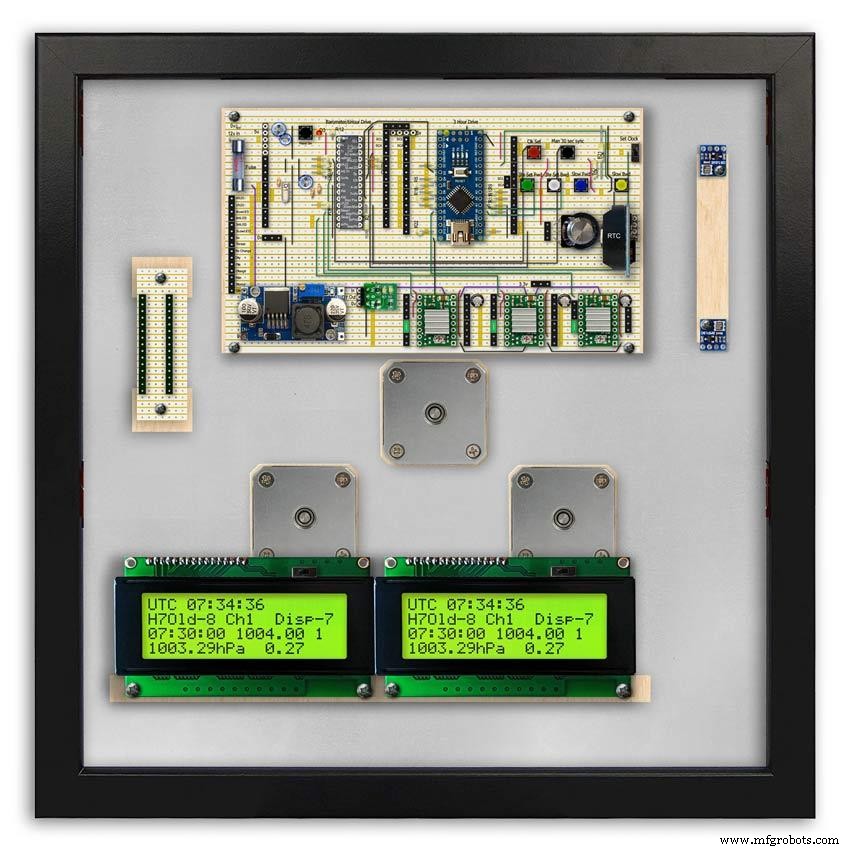
À l'intérieur du boîtier, deux écrans LCD 20x4 affichent les informations de chacun des microprocesseurs.
L'affichage principal de la pression atmosphérique et l'affichage des 6 heures sont contrôlés par un RTC. Cette horloge fournit également une impulsion d'une heure pour l'affichage des 3 heures.
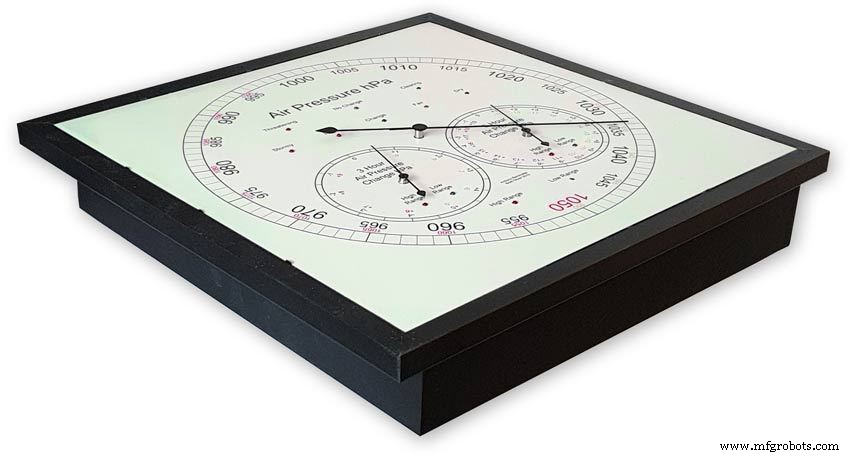
Étape 1 : comparaison avec un baromètre analogique conventionnel
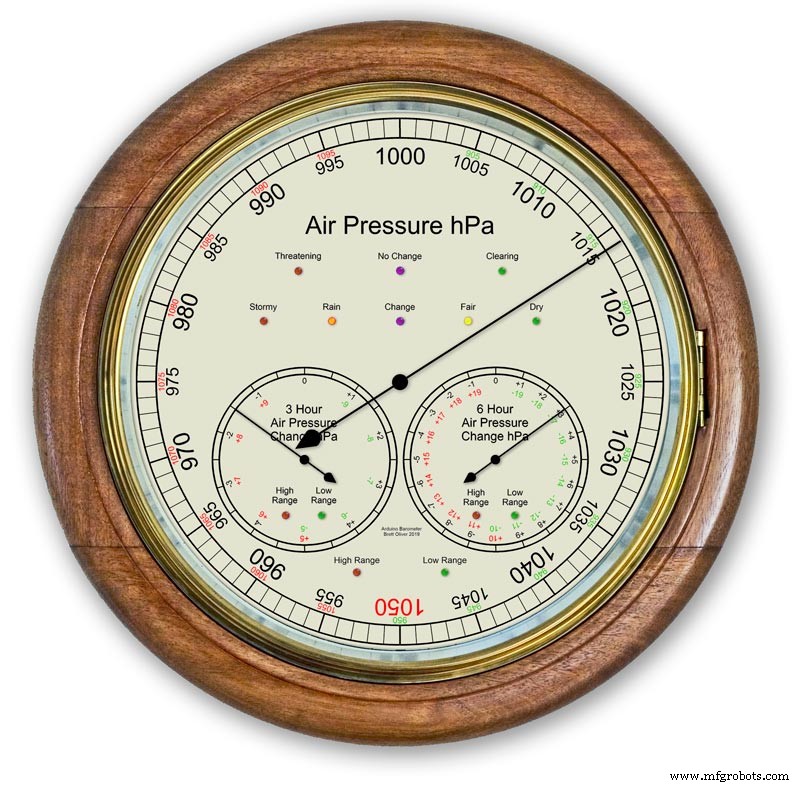
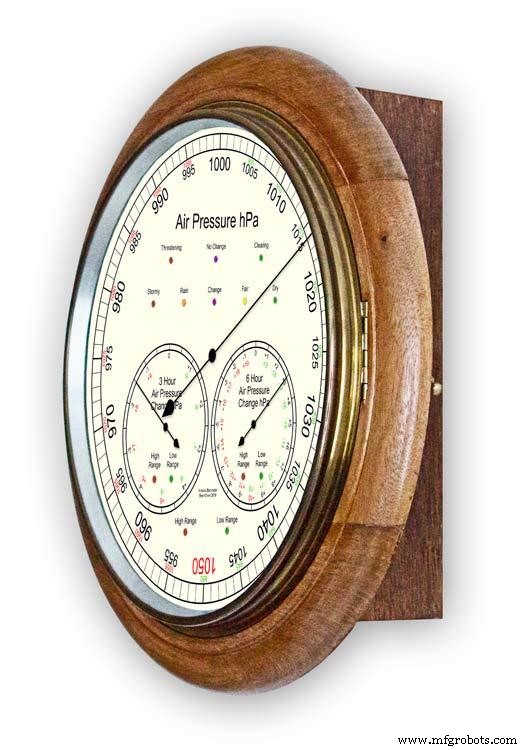
La plupart des baromètres analogiques pic. 2 utilisez simplement la pression atmosphérique comme indication pour prédire la météo et vous devez vous rappeler de régler le pointeur mobile et noter l'heure à laquelle il a été réglé pour voir le changement de pression atmosphérique.
La météo est simplement écrite autour du cadran et lue à partir du pointeur. La prévision est un peu plus compliquée car vous devez utiliser le 2ème pointeur et noter tout changement sur une période de 3 heures. Vous devrez mémoriser les combinaisons de pression actuelle et de pression montante/descendante pour obtenir vos prévisions.
Mon baromètre surveille en permanence le changement de pression sur une période de 3 heures et 6 heures et affiche ces lectures sur 2 cadrans séparés.
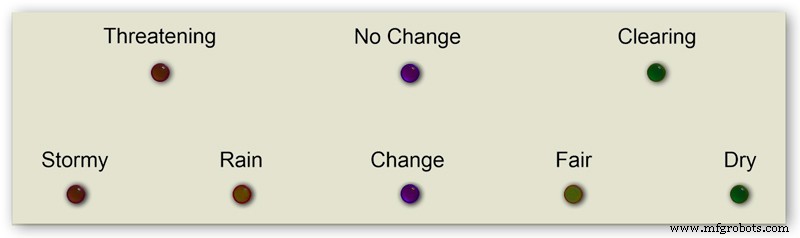
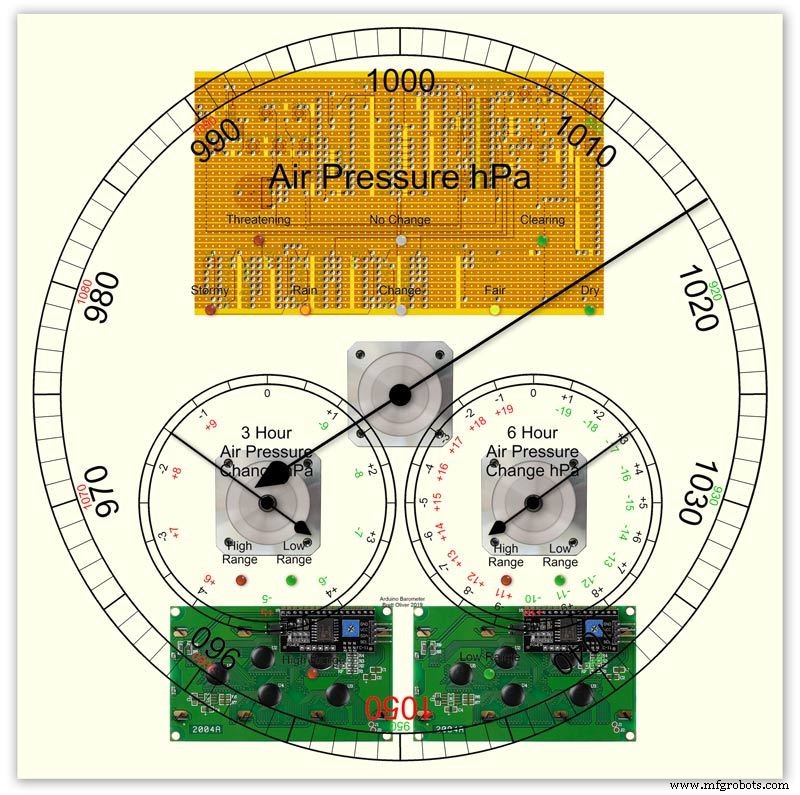
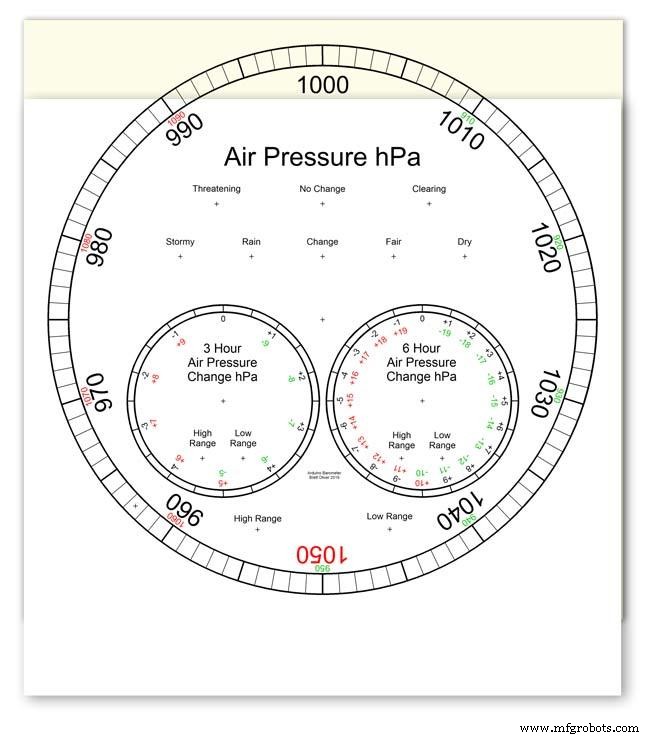
l'image 1 montre la plage de prévisions météorologiques de mon baromètre.
La photo 3 montre un gros plan des LED de prédiction météo. Les prévisions météorologiques sont basées sur le changement de pression atmosphérique des 3 dernières heures.
Étape 2 :Démo du baromètre prévoyant une tempête

Cette animation en accéléré montre comment les aiguilles du baromètre et les voyants de prévision réagissent à un orage imminent.
Étape 3 : cadrans à portée étendue
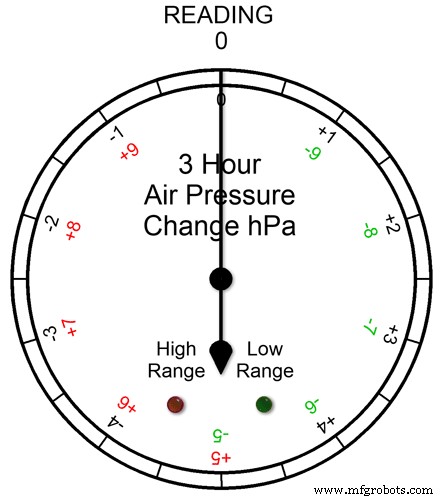
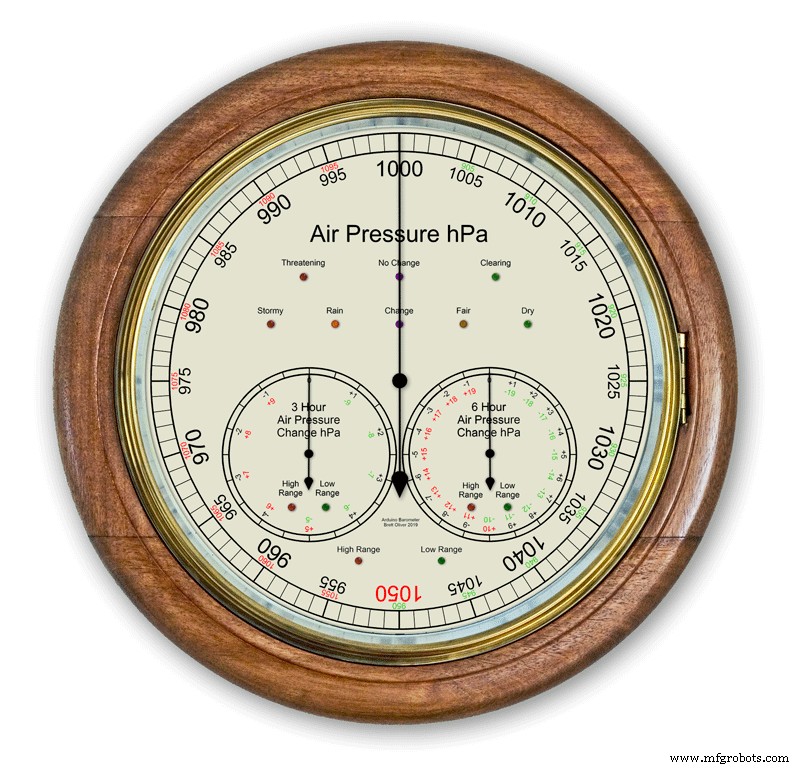
Les trois cadrans ont des plages étendues. Cela permet une résolution d'affichage plus grande sur les cadrans pour un temps normal. Dans des conditions météorologiques extrêmes, les cadrans passent en portée étendue.
L'animation pic1. montre comment les LED s'allument lorsque la portée étendue est en fonctionnement. La LED rouge s'affiche lorsque la lecture est de +5 et plus. Vous liriez alors le lettrage de l'échelle rouge. La LED verte s'affiche lorsque la lecture est de -5 et moins. Vous liriez alors le lettrage de l'échelle verte. Si la lecture dépasse la plage étendue, par exemple sur ce cadran au-dessus de +9 ou -9, les deux LED s'allumeront pour montrer ceci - voir la section suivante.
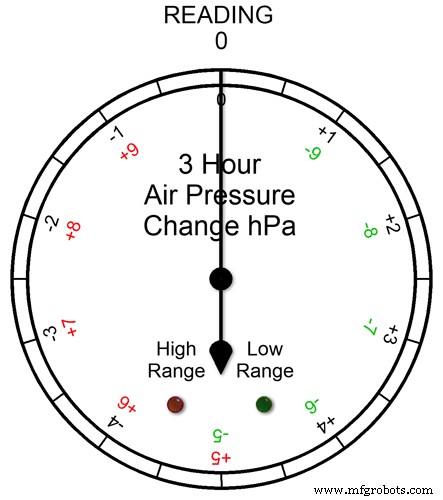
Lectures de pression sur une plage étendue Pic.2 Si la lecture de la pression dépasse la plage étendue + ou -, les deux LED s'allumeront pour vous avertir que des lectures ou des changements extrêmes ont eu lieu. Les cadrans afficheront toujours les lectures, par exemple sur le cadran de 3 heures si la lecture était de -10, alors le cadran pointerait sur 0 avec les deux LED allumées. Si la lecture de 3 heures était de -11, le cadran indiquerait -1 avec les deux LED allumées. Vous ajoutez juste 10 à la lecture.
Dans l'animation ci-dessous, la différence de pression de 3 heures commence à 0 et la différence de pression diminue. À -5 hPa, la LED verte s'allume pour indiquer que la plage étendue négative est en cours d'utilisation. Le changement de pression continue de chuter jusqu'à ce qu'il atteigne -10hPa. C'est maintenant au-dessus de la plage étendue, donc la LED rouge s'allume également. La pression retombe ensuite à -11 hPa et les deux LED restent allumées. Le changement de pression commence à diminuer jusqu'à -10 hPa et encore une fois, il s'agit toujours de la plage étendue, de sorte que les deux LED restent allumées. Une fois que le changement de pression descend en dessous de -10, la LED rouge s'éteint indiquant que la plage étendue est à nouveau utilisée.
J'ai réglé la plage étendue dans les cadrans après avoir vérifié les conditions météorologiques extrêmes au Royaume-Uni et bien que je m'attendais à ce que les plages étendues de 3 heures et 6 heures soient utilisées, je ne pensais pas que la plage étendue serait jamais utilisée sur l'affichage principal du baromètre.
Pic.3 Lors du prototypage du baromètre en janvier 2020, il y avait une lecture record de 1050hPa dans le sud de l'Angleterre, mon baromètre principal est entré dans la plage étendue avec le pointeur sur le 1050 rouge et la LED rouge haute gamme allumée.
Étape 4 :Affichages d'informations LCD
3 heures
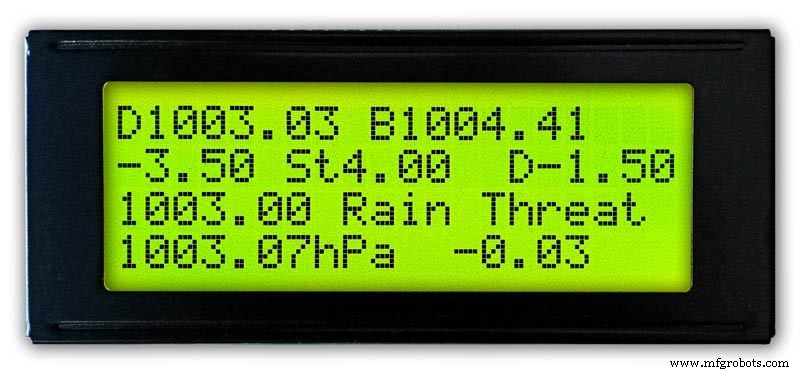
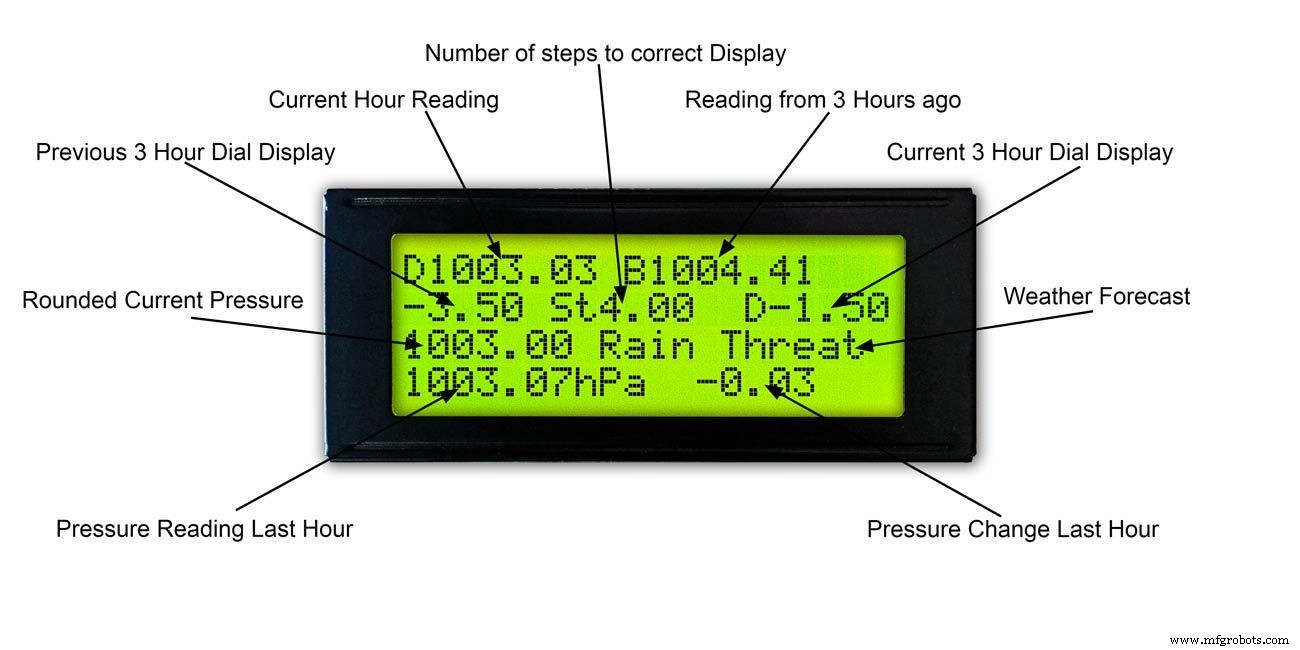
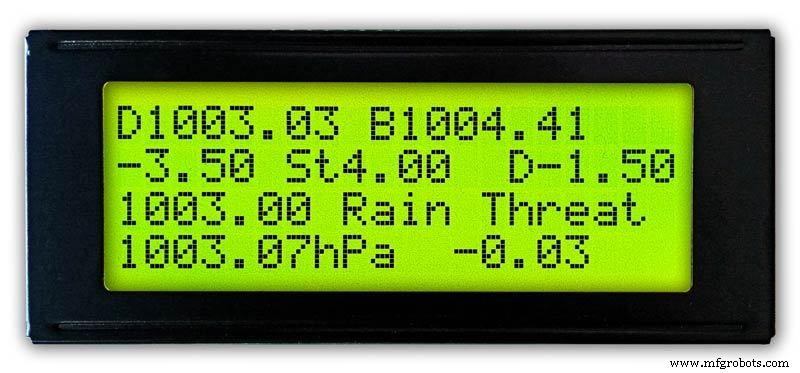
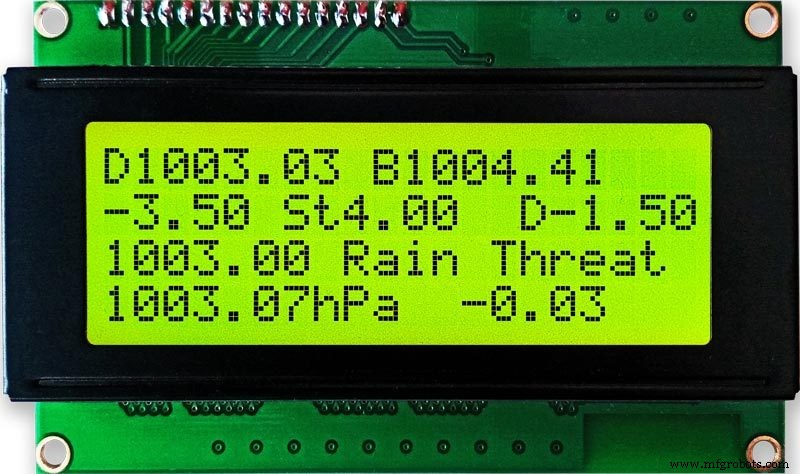
Pic.1 &2 Cet affichage montre les lectures de 3 heures et les informations sur le cadran de 3 heures. Il affiche également les prévisions météorologiques basées sur la lecture actuelle et les 3 dernières heures.
6 heures
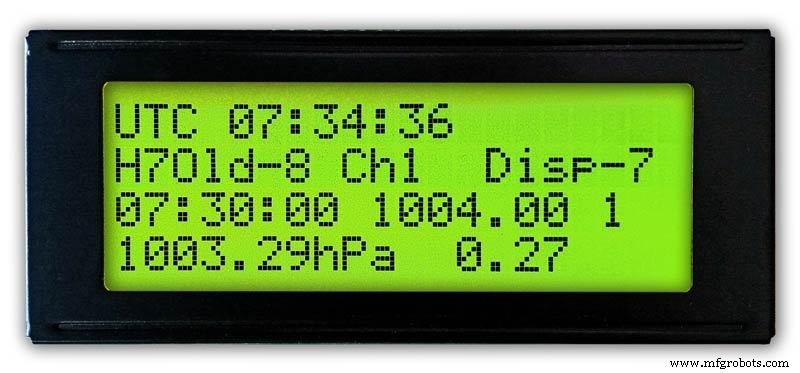
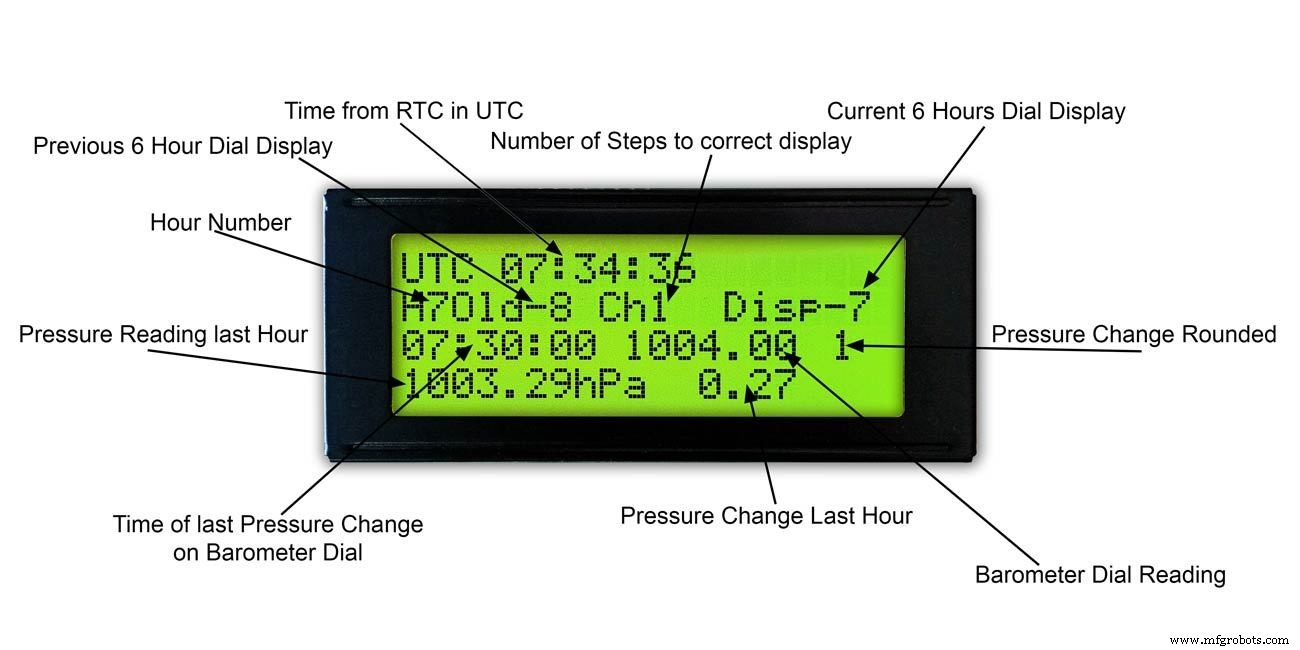
Pic. 3 &4 Cet écran affiche les principales lectures du cadran du baromètre ainsi que les lectures sur 6 heures.
Étape 5 :Prédire la météo

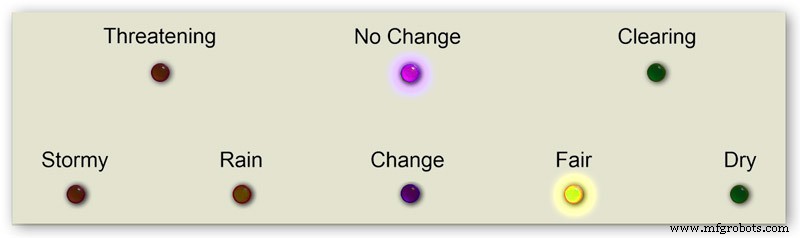

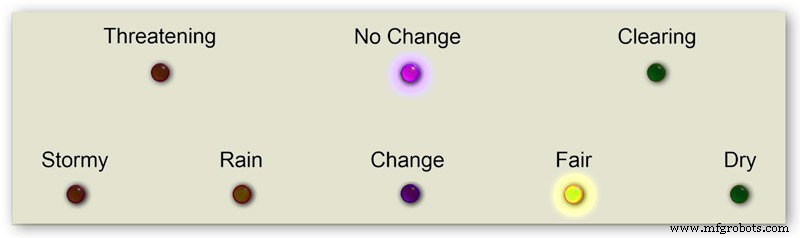
Les prévisions météo sur mon baromètre utilisent 8 LED.
En utilisant la pression atmosphérique actuelle et le taux de changement au cours des 3 dernières heures, la météo est prédite sur les LED.
L'animation 1 montre les différentes combinaisons de combinaisons de LED de prévision.
J'ai visité un certain nombre de sites météorologiques et j'ai rassemblé les informations suivantes sur la prévision du temps avec un baromètre.
Prédire la météo avec le baromètre
Plus précisément, un baromètre avec des lectures en hPa peut être interprété de cette manière :
Si la lecture est supérieure à 1022 hPa
Une pression croissante ou constante signifie un beau temps continu. Une pression en baisse lente signifie un temps beau. Une pression en baisse rapide signifie des conditions nuageuses et plus chaudes.
Si elle tombe entre 1009 et 1022 hPa
Une pression croissante ou constante signifie que les conditions actuelles se poursuivront. Une pression en baisse lente signifie peu de changement dans le temps. Une pression en baisse rapide signifie qu'il y a probablement de la pluie, ou de la neige s'il fait assez froid.
Si la lecture est inférieure à 1009 hPa
Une pression croissante ou constante indique un temps dégagé et un temps plus frais. Une pression en baisse lente indique de la pluie Une pression en baisse rapide indique qu'une tempête arrive.
En utilisant les informations ci-dessus mon baromètre applique la logique suivante pour prédire la météo.
La logique est appliquée dans la séquence ci-dessous avec les LED résultantes allumées.
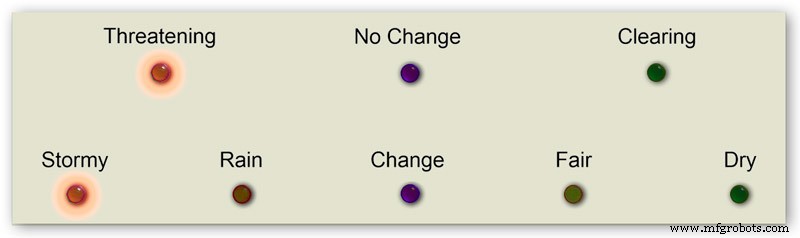
Pic.2 Pression atmosphérique <1009 hPa
Une pression croissante ou constante indique un temps dégagé et plus frais
Pression d'air <1009.00 et changement de 3 heures>=0
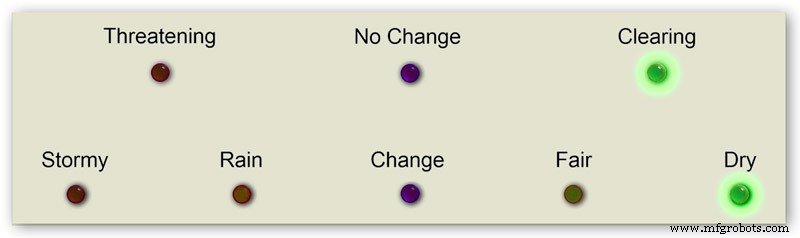
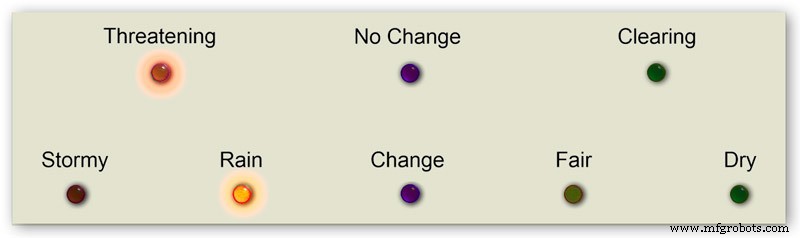
Pic.3 Pression atmosphérique <1009 hPa
Une pression en baisse lente indique de la pluie
Pression d'air <1009.00 et changement de 3 heures
Pic.4 Pression atmosphérique <1009 hPa
La chute rapide de la pression indique qu'une tempête approche.
Pression d'air <1009.00 et changement de 3 heures <-1.5
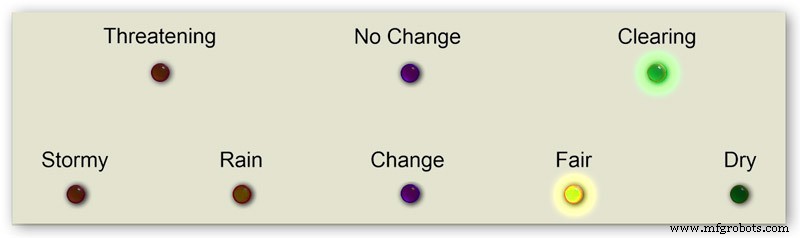
Pic.5 La pression atmosphérique est comprise entre 1009 et 1022 hPa
Une pression croissante ou constante signifie que les conditions actuelles continueront.
La pression en baisse lente signifie peu de changement dans le temps.
Pression d'air>=1009,00 et pression d'air <=1022,00 et changement de 3 heures>=-1,5 et changement de 3 heures <=1,5
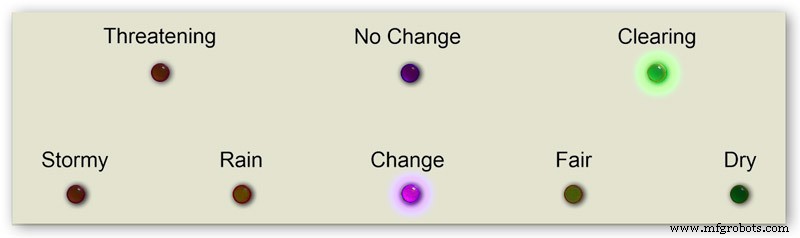
Pic.6 La pression atmosphérique est comprise entre 1009 et 1022 hPa
La pression atmosphérique augmente rapidement signifie que le temps s'éclaircit
Pression d'air>=1009.00 et pression d'air <=1022.00 et changement de 3 heures> 1.5
Pic.7 La pression atmosphérique est comprise entre 1009 et 1022 hPa
La chute rapide de la pression signifie qu'il y a probablement de la pluie ou de la neige s'il fait assez froid.
Pression d'air>=1009.00 et pression d'air <=1022.00 et changement de 3 heures <-1.5
Pic.8 Pression atmosphérique supérieure à 1022 hPa
Une pression croissante ou constante signifie un temps sec.
Pression d'air> 1022,00 et changement de 3 heures>=0
Pic.9 Pression atmosphérique supérieure à 1022 hPa
Une pression en baisse lente signifie un temps clément.
Pression atmosphérique> 1022,00 et changement de 3 heures
Pic.10 Pression atmosphérique supérieure à 1022 hPa
Une baisse rapide de la pression signifie un changement
Pression d'air> 1022,00 &&Changement de 3 heures <-1,5
Étape 6 :Démarrage du baromètre
Lors de la mise sous tension initiale, un test de LED est effectué.
Une fois terminé, les aiguilles reviendront à leurs réglages initiaux, prêtes à être calibrées.
Étape 7 :Paramètres de démarrage initiaux RTC
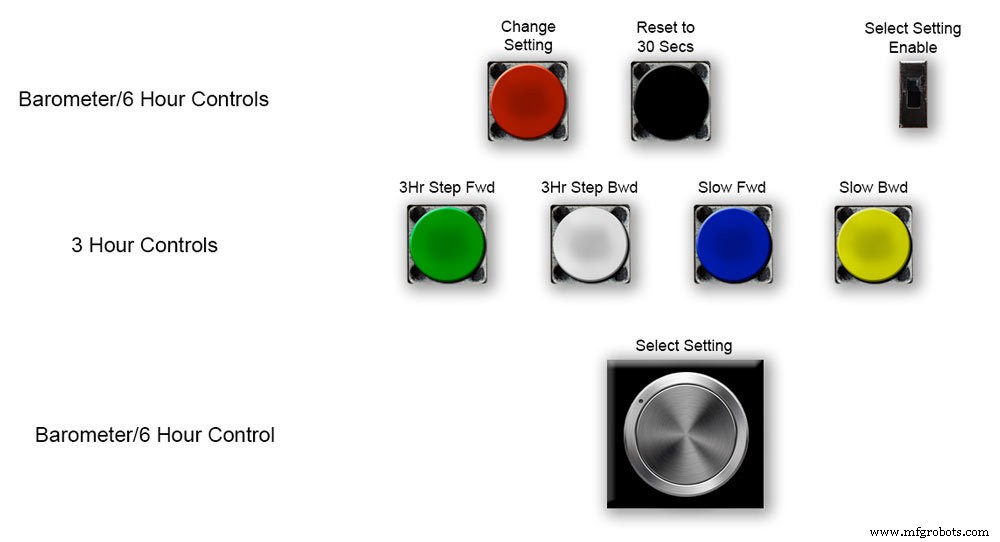






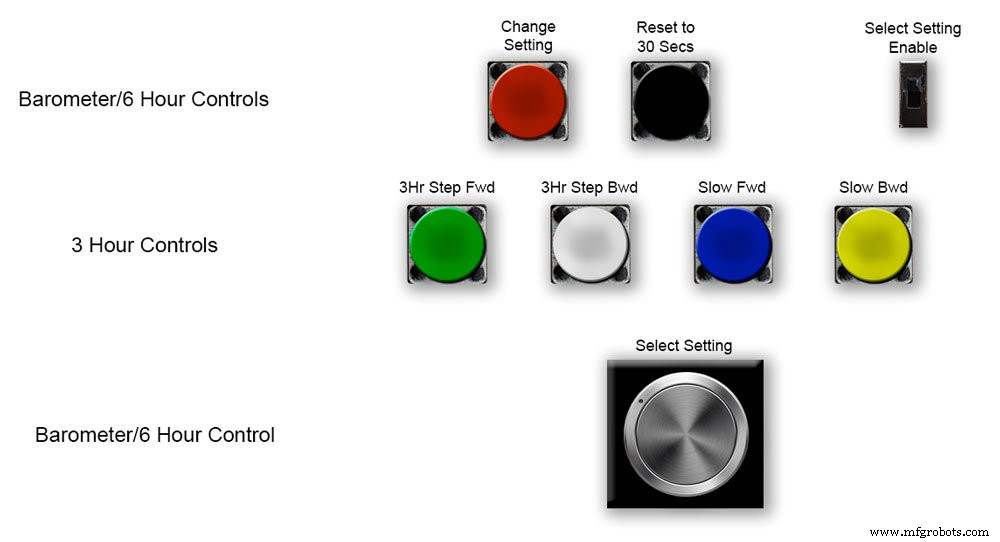
Pic.1 Lors de la mise sous tension initiale, le baromètre devra être configuré à l'aide des commandes de la carte Vero.
RTC
Image 2 Le RTC devra être réglé sur l'heure correcte. Je le règle sur UTC et ne prends pas la peine de passer à l'heure d'été. Avant de régler l'heure, notez la valeur "Disp" dans ce cas -5. Il s'agit de la valeur de l'aiguille des 6 heures et sera nécessaire plus tard dans la configuration. Faites glisser le commutateur « Select Setting Enable » sur la position On. L'affichage ne changera pas.
Pic.3 Tournez lentement le bouton "Select Setting" dans le sens des aiguilles d'une montre et la 2ème rangée de l'écran LCD principal changera.
Arrêtez-vous lorsque l'écran affiche "RTC Hour Retard" Si vous souhaitez retarder les heures RTC, appuyez sur le bouton rouge "modifier le réglage". Un simple clic fera reculer les heures. Des clics multiples reculeront le nombre de clics appuyés mais prendront une seconde pour mettre à jour le RTC.
Image 4 Tourner davantage le bouton "Select Setting" changera l'affichage en "RTC Hour Advance"
Si vous souhaitez faire avancer les heures RTC, appuyez sur le bouton rouge « modifier le réglage ». Un simple clic fera avancer les heures. Plusieurs clics augmenteront le nombre de clics enfoncés, mais prendront une seconde pour mettre à jour le RTC.
Image 5 Tourner davantage le bouton "Select Setting" changera l'affichage en "RTC Min Retard"
Si vous souhaitez retarder les minutes RTC, appuyez sur le bouton rouge « modifier le réglage ». Un simple clic fera reculer les minutes. Des clics multiples reculeront le nombre de clics appuyés mais prendront une seconde pour mettre à jour le RTC.
Image 6 Tourner davantage le bouton « Select Setting » changera l'affichage en « RTC Min Advance »
Si vous souhaitez faire avancer les minutes RTC, appuyez sur le bouton rouge « modifier le réglage ». Un simple clic fera avancer les minutes. Plusieurs clics augmenteront le nombre de clics enfoncés, mais prendront une seconde pour mettre à jour le RTC.
Image 7 Une fois que vous avez terminé le réglage RTC ou tout autre réglage, retournez le bouton "Select Setting" complètement dans le sens inverse des aiguilles d'une montre jusqu'à ce que l'écran affiche "Off"
Faites glisser le commutateur « Select Setting Enable » sur la position Off.
Noter. Les secondes peuvent être synchronisées à 30 secondes à tout moment en appuyant sur le bouton noir "Réinitialiser à 30 secondes". L'heure sera désormais mémorisée sur le RTC si l'alimentation est coupée.
Étape 8 :Paramètres de démarrage initiaux Aiguille 6 heures






Réglage de l'aiguille des 6 heures
Pic.1 Une fois le RTC réglé, le baromètre et les aiguilles de pression d'air sur 6 heures doivent être réglés.
Faites glisser le commutateur « Select Setting Enable » sur la position On. L'affichage ne changera pas.
Tournez lentement le bouton "Select Setting" dans le sens des aiguilles d'une montre jusqu'à ce que "6Hr Baro Inch Retard" s'affiche.
Lors de la toute première mise sous tension, l'aiguille des 6 heures devra être étalonnée au chiffre le plus proche.
Si le chiffre le plus proche se trouve derrière l'aiguille, appuyez sur le bouton rouge « modifier le réglage ». Un simple clic fera reculer la main pas à pas. Maintenir le bouton fera reculer la main à plusieurs reprises. Une fois que la main est exactement sur un chiffre, relâchez le bouton.
Pic.2 Si le chiffre le plus proche devant la main ou si vous avez trop retardé la main en utilisant ce qui précède, tournez le bouton "Select Setting" dans le sens des aiguilles d'une montre jusqu'à ce que "6Hr Baro Inch Advn" s'affiche.
Appuyez sur le bouton rouge « modifier le réglage ». Un simple clic fera avancer la main pas à pas. Maintenir le bouton avancera la main à plusieurs reprises. Une fois que la main est exactement sur un chiffre, relâchez le bouton.
Pic.3 Une fois que l'aiguille des 6 heures a été réglée exactement sur un chiffre, l'aiguille des heures doit être réglée sur la valeur correcte.
Avant de régler le RTC, vous avez noté ce nombre -5.
Image 4 Si l'aiguille de l'affichage 6 heures est trop avancée.
Tournez le bouton "Select Setting" dans le sens des aiguilles d'une montre jusqu'à ce que "6Hr Baro Retard" s'affiche. Appuyez et relâchez le bouton rouge « modifier le réglage ». Ce seuil fait reculer l'aiguille des 6 heures d'une unité entière. Arrêtez-vous lorsque l'aiguille des 6 heures atteint le nombre que vous avez noté.
Image 5 Si l'aiguille d'affichage des 6 heures est retardée.
Tournez le bouton "Select Setting" dans le sens des aiguilles d'une montre jusqu'à ce que "6Hr Baro Advance" s'affiche. Appuyez et relâchez le bouton rouge « modifier le réglage ». Ce seuil fait avancer l'aiguille de 6 heures d'une unité entière. Arrêtez-vous lorsque l'aiguille des 6 heures atteint le nombre que vous avez noté.
Pic.6 Notez que l'affichage de 6 heures prendra 8 heures pour s'afficher correctement car il devra stocker les lectures en mémoire sur cette période de temps.
Vous pouvez toujours ajouter les lectures de pression d'air précédentes dans le code avant le chargement si vous avez besoin de l'affichage de 6 heures pour fonctionner à partir du démarrage.
Le code convertit les heures en un nombre H comme affiché au-dessus de H =6. Dans la ligne de code 128 H6 signifiera mettre la lecture de l'heure actuelle sous l'heure6 la lecture précédente dans l'heure7 la lecture avant celle dans l'heure0 etc
int heure0 =1015 ;
int heure1 =1016
;int heure2 =1015;
int heure3 =1016 ;
int heure4 =1016
;int heure5 =1016;
int heure6 =1012 ;
int heure7 =1013 ;
Vous devriez pouvoir obtenir vos lectures locales sur Internet.
J'ai configuré une page à partir de ma station météo pour pouvoir vérifier cela lors de la construction du baromètre.
Cliquez sur ce lien pour voir les changements horaires à Kenley Surrey UK.
Étape 9 :Paramètres de démarrage initiaux Aiguille principale du baromètre




Réglage de l'aiguille principale du baromètre
Pic.1 Maintenant que l'affichage des 6 heures est correct, l'aiguille principale du baromètre devra être réglée sur la pression arrondie au niveau de la mer sur la 3e rangée vers le bas sur l'écran LCD principal.
Lors de la toute première mise sous tension, l'aiguille du baromètre principal devra être étalonnée au chiffre le plus proche. Tournez le bouton "Select Setting" dans le sens des aiguilles d'une montre jusqu'à ce que "Baro Inch Retard" s'affiche.
Si le chiffre le plus proche se trouve derrière l'aiguille, appuyez sur le bouton rouge « modifier le réglage ». Un simple clic fera reculer la main pas à pas. Maintenir le bouton fera reculer la main à plusieurs reprises. Une fois que la main est exactement sur un chiffre, relâchez le bouton.
Pic.2 Si le chiffre le plus proche devant la main ou si vous avez trop retardé la main en utilisant ce qui précède, tournez le bouton "Select Setting" dans le sens des aiguilles d'une montre jusqu'à ce que "Baro Inch Advn" s'affiche.
Appuyez sur le bouton rouge « modifier le réglage ».
Un simple clic fera avancer la main pas à pas. Maintenez le bouton enfoncé pour avancer la main à plusieurs reprises. Une fois que la main est exactement sur un chiffre, relâchez le bouton.
Pic.3 Si l'aiguille principale du baromètre est trop avancée.
Tournez le bouton "Select Setting" dans le sens des aiguilles d'une montre jusqu'à ce que "Barometer Retard" s'affiche.
Appuyez et relâchez le bouton rouge « modifier le réglage ».
Cela fera reculer l'aiguille du baromètre principal d'une unité entière. Arrêtez-vous lorsque l'aiguille des heures atteint la pression arrondie au niveau de la mer indiquée.
Pic.4 Si l'aiguille principale du baromètre est retardée par rapport à la pression arrondie au niveau de la mer indiquée.
Tournez le bouton "Select Setting" dans le sens des aiguilles d'une montre jusqu'à ce que "Barometer Advance" s'affiche.
Appuyez et relâchez le bouton rouge « modifier le réglage ».
Cela fera avancer l'aiguille du baromètre principal d'une unité entière. Arrêtez-vous lorsque l'aiguille atteint la pression arrondie au niveau de la mer indiquée.
Étape 10 :Paramètres de démarrage initiaux Aiguille 3 heures
Réglage de l'aiguille des 3 heures.
Oic.1 Le réglage de l'aiguille des 3 heures se fait par les quatre boutons Vert, Blanc, Bleu et Jaune sur la carte Vero.
Lors de la mise sous tension initiale, l'aiguille des 3 heures devra être calibrée à l'unité ou à la demi-unité la plus proche.
Pic.2 Si la valeur de l'unité la plus proche de l'aiguille de 3 heures est en avance sur l'aiguille de 3 heures, appuyez sur le bouton jaune "Slow Bwd" pour reculer l'aiguille. Maintenir le bouton enfoncé fera reculer la main à plusieurs reprises.
Si la valeur de l'unité la plus proche de l'aiguille des 3 heures est derrière l'aiguille des 3 heures, appuyez sur le bouton bleu « Slow Fwd » pour avancer l'aiguille. Maintenir le bouton enfoncé fera avancer la main à plusieurs reprises.
Une fois que l'aiguille des 3 heures est exactement sur une unité/demi unité, l'aiguille peut être réglée sur la valeur « D » sur l'écran LCD des 3 heures.
Si dans l'aiguille est en avance sur la valeur "D", appuyez sur le bouton blanc "3Hr Step Bwd" pour reculer l'aiguille des 3 heures par demi-unités.
Si l'aiguille est inférieure à la valeur "D", appuyez sur le bouton vert "3Hr Step Fwd" pour avancer l'aiguille des 3 heures par demi-unités.
Notez que l'affichage de 3 heures prendra 4 heures pour s'afficher correctement car il devra stocker les lectures en mémoire sur cette période de temps.
Vous pouvez toujours ajouter les lectures précédentes de la pression atmosphérique dans le code avant le chargement si vous avez besoin des prévisions et de l'affichage sur 3 heures pour fonctionner à partir du démarrage.
Code d'affichage de 3 heures à la ligne 124
float hour0 est l'heure actuelle
float hour1 est l'heure précédente etc etc.
float heure0 =1036,00 ;
float heure1 =1036,00 ;
float heure2 =1036,00 ;
float heure3 =1036,00 ;
float heure4 =1036,00 ;
Vous devriez pouvoir obtenir vos lectures locales sur Internet.
Étape 11 :Modules/Composants



Modules
Dans la mesure du possible, ce projet utilise des modules prédéfinis pour économiser du temps de construction et de conception.
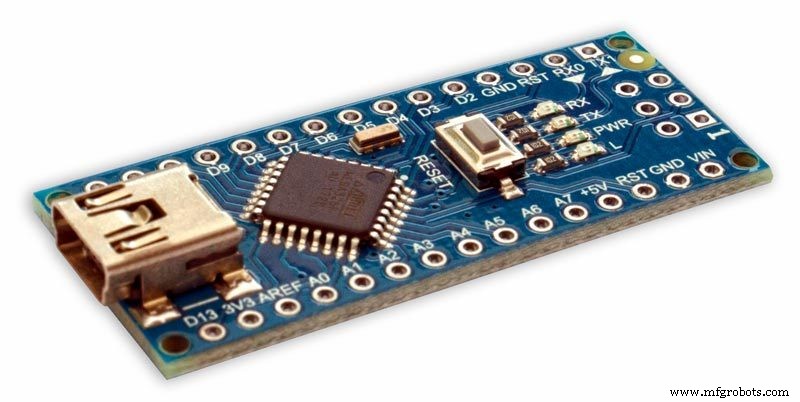
Microprocesseurs
Ce projet utilise 2 microprocesseurs un Atmega 328(UNO) pic.1 et un Arduino Nano pic.2. J'ai utilisé cette combinaison car j'avais déjà construit un 328 à partir d'un autre projet et en raison de l'espace limité sur la carte Vero, j'ai également ajouté le Nano.
Puissance
Le baromètre utilise environ 65 mA et cela augmentera un peu à mesure que chaque moteur marche pendant une fraction de seconde toutes les 10 minutes à et heure
AMS117 photo.3
Le module de ce projet est de 3,3 v et est utilisé pour alimenter le module BMP180.
La série AMS1117 de régulateurs de tension réglables et fixes est conçue pour fournir un courant de sortie jusqu'à 1A et pour fonctionner jusqu'à un différentiel entrée-sortie de 1V. La tension de chute de l'appareil est garantie au maximum de 1,3 V, diminuant à des courants de charge inférieurs. Le réglage sur puce ajuste la tension de référence à 1,5 %. La limite de courant est définie pour minimiser la contrainte dans des conditions de surcharge sur les circuits du régulateur et de la source d'alimentation. Le module de ce projet est de 3,3 v et est utilisé pour alimenter le module BMP180.
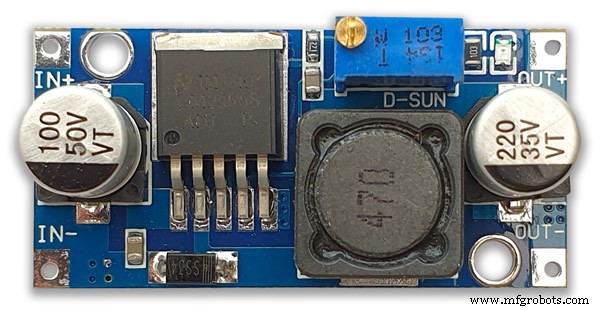
LM2596 Buck DC to DC Converter 3.0-40V à 1.5-35V pic.4Ce module convertit l'entrée 12v en 5v
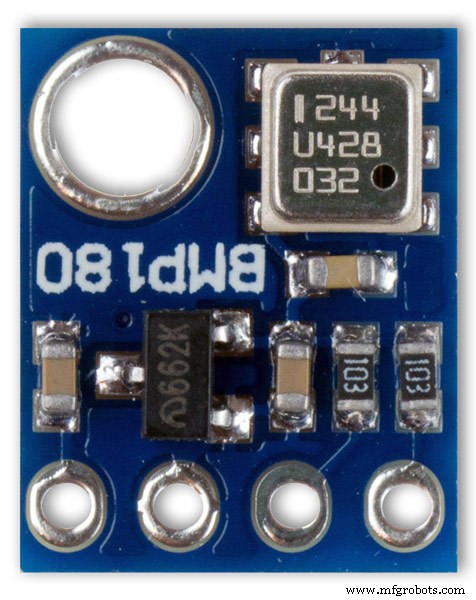
Module de capteur de pression BMP180 2 hors photo.5 Le BMP180 Breakout est un capteur de pression barométrique avec une interface I2C ("Wire"). Les capteurs de pression barométrique mesurent la pression absolue de l'air qui les entoure. Cette pression varie en fonction du temps et de l'altitude. Selon la façon dont vous interprétez les données, vous pouvez surveiller les changements de temps, mesurer l'altitude ou toute autre tâche nécessitant une lecture précise de la pression.
Connectez les broches +, -, CL et DA à votre Arduino.
CL passe à SCL et DA à SDA.
IMPORTANT : connectez les broches d'alimentation (+ et -) UNIQUEMENT à une alimentation de 3,3 V. Des tensions plus élevées endommageront définitivement la pièce. Notez que parce que I2C utilise des pilotes à drain ouvert, il est sûr de connecter les broches I2C (DA et CL) à un port I2C sur un microprocesseur 5 V.
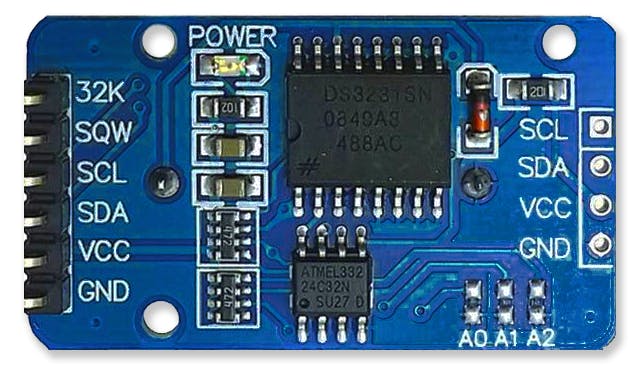
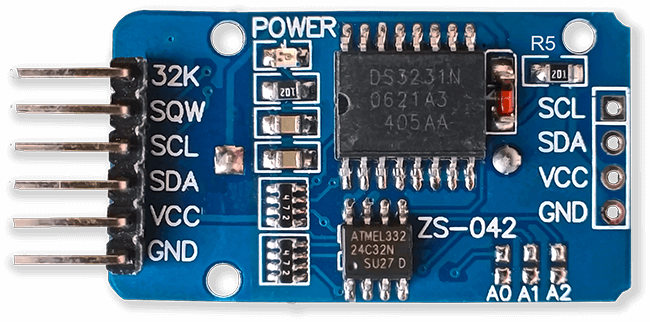
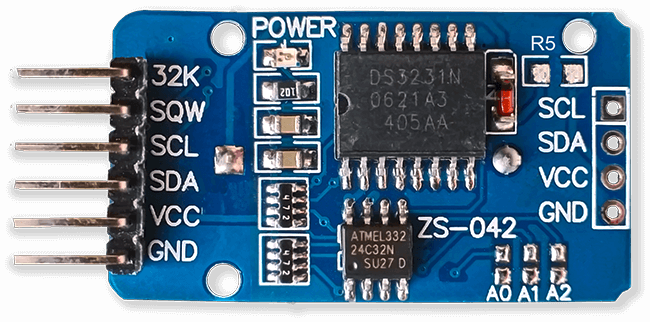
Horloge temps réel RTC pic.6
Ce bromomètre utilise un module d'horloge en temps réel de précision DS3231 AT24C32 I2C.
Ce module est principalement utilisé pour le chronométrage mais fournit également des horodatages sur l'écran LCD. L'heure est réglée sur UTC et n'est pas modifiée pour l'heure d'été. Le module est fourni avec une batterie rechargeable Lithium-Ion voir schéma ci-dessus. J'utilise une batterie non rechargeable, j'ai donc retiré la résistance R5 du module, voir la section Modification RTC pour plus de détails.
Moteurs pas à pas 3 désactivés Le baromètre utilise 3 moteurs pas à pas Nema 17 1A, couple de maintien de 13N.cm, 4 fils, 1,8° J'ai utilisé des moteurs de 1,8° car les pas s'adaptent exactement à 360° 200 fois. Vous pouvez utiliser des moteurs Nema 8 si vous le souhaitez, mais n'utilisez pas de moteurs 28BYJ-48-5V car ils n'ont pas l'angle de pas de 1,8° requis.
L'angle de pas de 1,8° est requis car il se divise exactement en 360° pour mes cadrans de baromètre.
Écrans LCD 2 désactivés
J'ai utilisé 2 écrans LCD 20x4, l'un pour le baromètre, l'horloge et l'affichage 6 heures et l'autre pour l'affichage 3 heures et les prévisions.
Étape 12 :Modules/Composants A4988 Pilote de moteur pas à pas
A4988 pilote de moteur pas à pas bipolaire micropas 3 off
Important de lire attentivement cette section
Mon baromètre est réglé sur une rotation de 1/16e et le code est ajusté en conséquence.
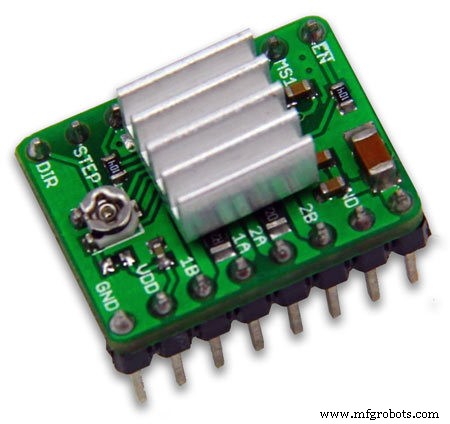
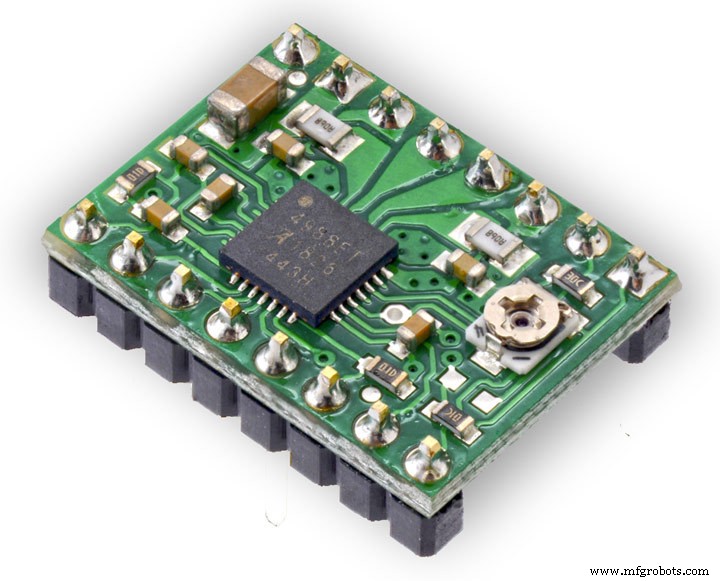
A4988 pilote de moteur pas à pas bipolaire micropas pic.1 avec et pic.2 sans radiateur
Cette carte de dérivation pour le pilote de moteur pas à pas bipolaire à micropas A4988 d'Allegro comprend une limitation de courant réglable, une protection contre les surintensités et les surchauffes, et cinq résolutions de micropas différentes (jusqu'à 1/16 pas).
Il fonctionne de 8 V à 35 V et peut fournir jusqu'à environ 1 A par phase sans dissipateur thermique ni flux d'air forcé (il est conçu pour 2 A par bobine avec un refroidissement supplémentaire suffisant).
Voici quelques-unes des principales caractéristiques du pilote :Interface de contrôle de pas et de direction simple Cinq résolutions de pas différentes :pas complet, demi-pas, quart de pas, huitième et seizième pas Le contrôle de courant réglable vous permet de définir la sortie de courant maximale avec un potentiomètre, qui vous permet d'utiliser des tensions supérieures à la tension nominale de votre moteur pas à pas pour atteindre des taux de pas plus élevés Contrôle de hachage intelligent qui sélectionne automatiquement le bon mode de décroissance du courant (décroissance rapide ou décroissance lente) protection contre les courants croisés Protection contre les courts-circuits à la terre et les charges court-circuitées
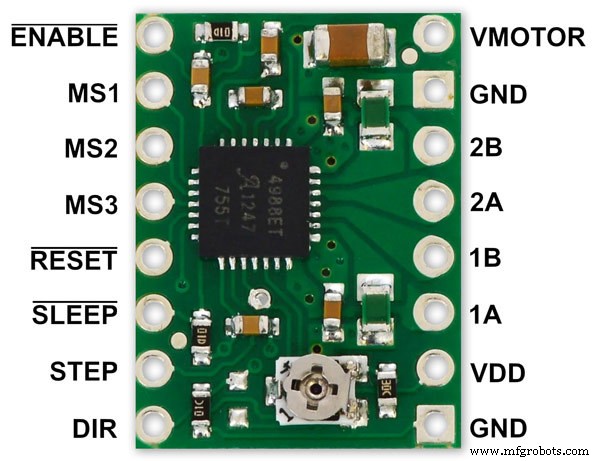
Connexions électriques Le pilote nécessite une tension d'alimentation logique (3 - 5,5 V) à connecter entre les broches VDD et GND et une tension d'alimentation du moteur (8 - 35 V) à connecter entre VMOT et GND. Ces alimentations doivent avoir des condensateurs de découplage appropriés à proximité de la carte, et elles doivent être capables de délivrer les courants attendus (crêtes jusqu'à 4 A pour l'alimentation du moteur).
Avertissement :cette carte porteuse utilise des condensateurs céramiques à faible ESR, ce qui la rend sensible aux pointes de tension LC destructrices, en particulier lors de l'utilisation de câbles d'alimentation de plus de quelques pouces. Dans les bonnes conditions, ces pointes peuvent dépasser la tension nominale maximale de 35 V pour l'A4988 et endommager définitivement la carte, même lorsque la tension d'alimentation du moteur est aussi basse que 12 V. Une façon de protéger le pilote contre de telles pointes consiste à mettre un gros condensateur électrolytique (au moins 47 µF) entre l'alimentation du moteur (VMOT) et la terre quelque part près de la carte.
Connexions moteur
Les moteurs pas à pas à quatre, six et huit fils peuvent être entraînés par l'A4988 s'ils sont correctement connectés. Warning:Connecting or disconnecting a stepper motor while the driver is powered can destroy the driver. (More generally, rewiring anything while it is powered is asking for trouble.)
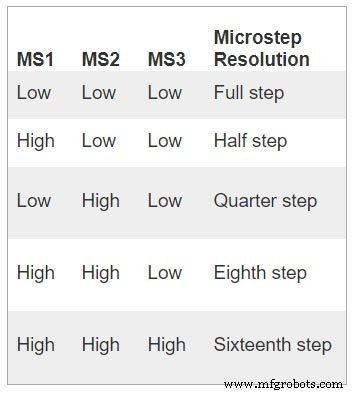
Step (and microstep) size
see table pic. 3Stepper motors typically have a step size specification (e.g. 1.8° or 200 steps per revolution), which applies to full steps. A microstepping driver such as the A4988 allows higher resolutions by allowing intermediate step locations, which are achieved by energizing the coils with intermediate current levels. For instance, driving a motor in quarter-step mode will give the 200-step-per-revolution motor 800 microsteps per revolution by using four different current levels.
The resolution (step size) selector inputs (MS1, MS2, and MS3) enable selection from the five step resolutions according to the table below. MS1 and MS3 have internal 100kΩ pull-down resistors and MS2 has an internal 50kΩ pull-down resistor, so leaving these three microstep selection pins disconnected results in full-step mode. For the microstep modes to function correctly, the current limit must be set low enough (see below) so that current limiting gets engaged. Otherwise, the intermediate current levels will not be correctly maintained, and the motor will skip microsteps.
Control inputs
pics 4 &5Each pulse to the STEP input corresponds to one microstep of the stepper motor in the direction selected by the DIR pin. Note that the STEP and DIR pins are not pulled to any particular voltage internally, so you should not leave either of these pins floating in your application.
If you just want rotation in a single direction, you can tie DIR directly to VCC or GND. The chip has three different inputs for controlling its many power states:RST, SLP, and EN. For details about these power states, see the datasheet.
Please note that the RST pin is floating; if you are not using the pin, you can connect it to the adjacent SLP pin on the PCB to bring it high and enable the board.
Current LImiting Before connecting the motor we should adjust the current limiting of the driver so that we are sure that the current is within the current limits of the motor. We can do that by adjusting the reference voltage using the potentiometer on the module to set the VRef.
See details on the video link pic. 6
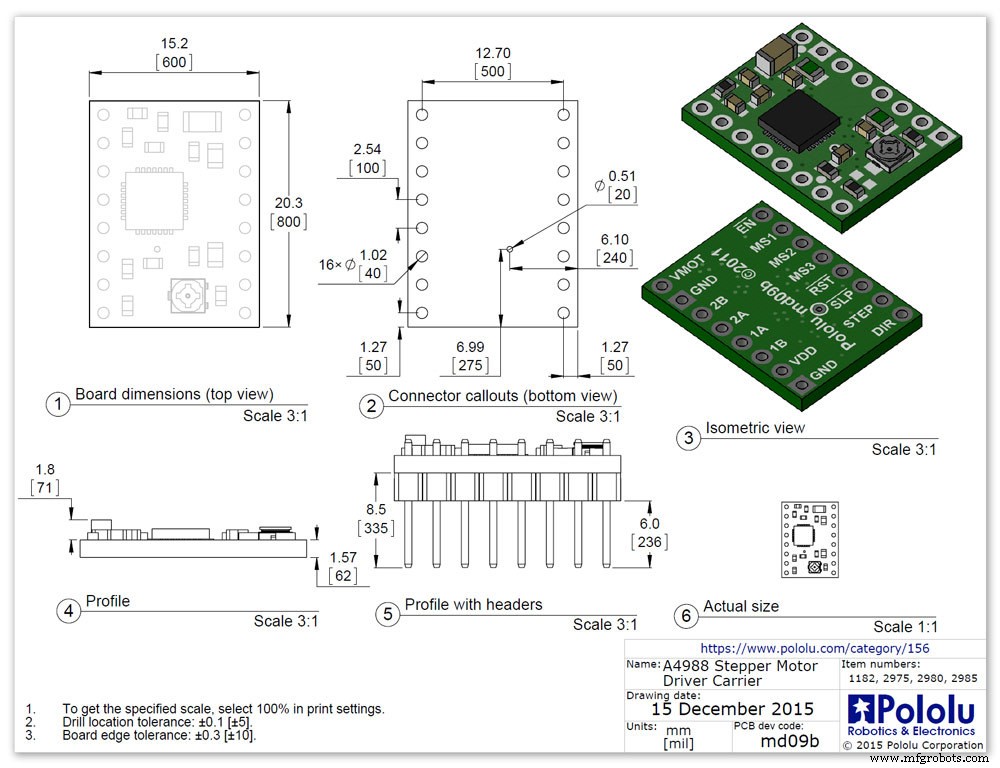
Manufacturers Drawing sheet pic.7
Step 13:Construction Prototyping
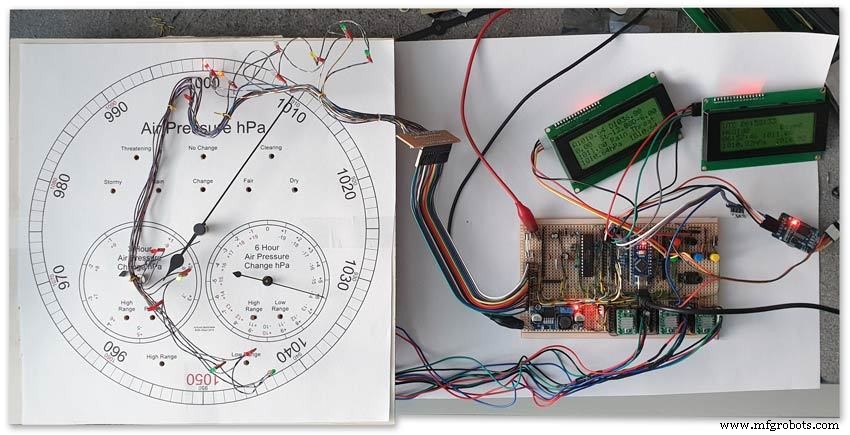
The circuit was prototyped using a hardboard dial with holes drilled for the motor spindles and LEDs.
Various dial designs were then printed on normal paper and Sellotaped over the top. The LED wiring loom was made with the LEDs in position on the temporary dial.
If you are using the round dial design this will allow you to check if the board etc will be mounted on the dial or in the back box.
Step 14:Construction RTC Modification
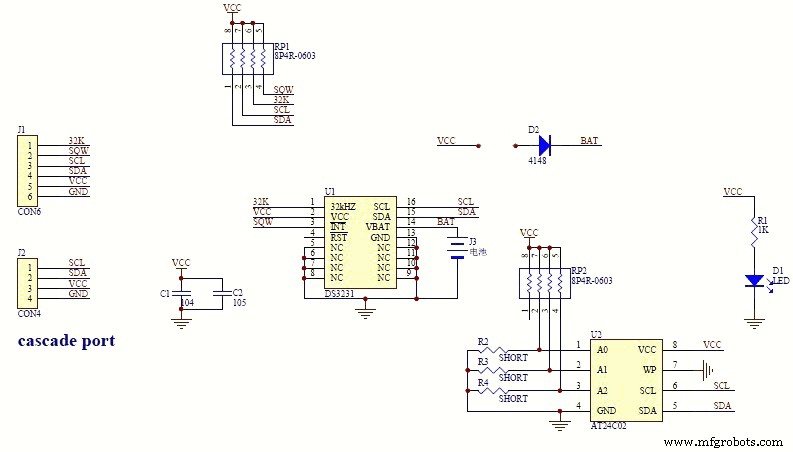
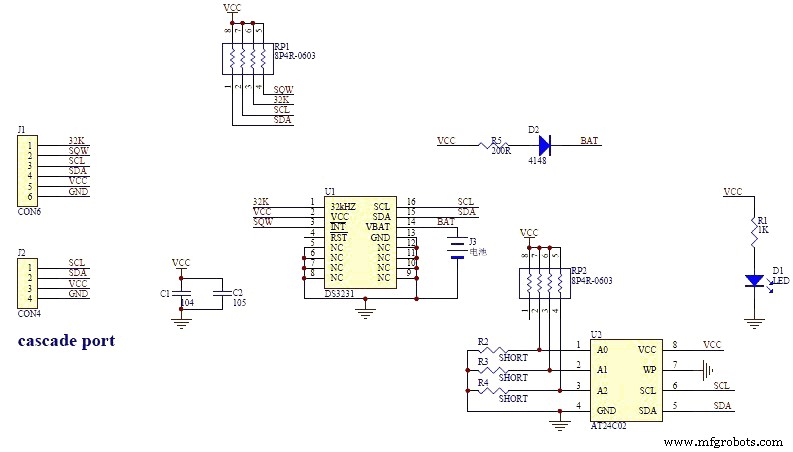
The module comes supplied with a Lithium-Ion rechargeable battery see diagram pic. 2.
I use a non rechargeable battery (I am not happy with the circuit design with a lithium-iron battery and associated fire risk) of the so have removed resistor R5 from the module as below. This stops any charge current to the battery.
Pic.3 shows the module without the resistor (just break it off) and pic.4 the modified circuit.
Step 15:Construction Mounting Modules &Boards

On the modern square dial design all the modules and boards are mounted on the dial. The classic round dial desgn will need some parts mounted in the back box as there is less space on the dial.
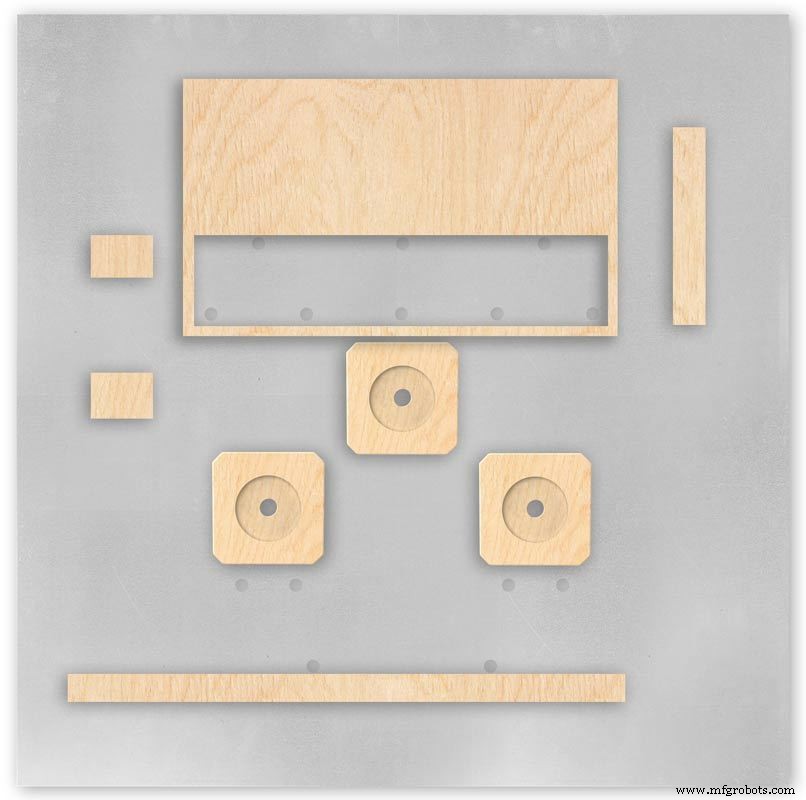
Motors are hot melt glued to wooden mounting blocks pic.1&2. The wooded blocks are cut fron a sheet of plywood pic.3. The mounting blocks depths are set to allow the correct protrusion of the spindles through the dial. I have hot melt glued the blocls to the dial.
The Vero Boards and LCD displays are also screwed to wooden blocks which have been glued to the dial using impact adhesive.
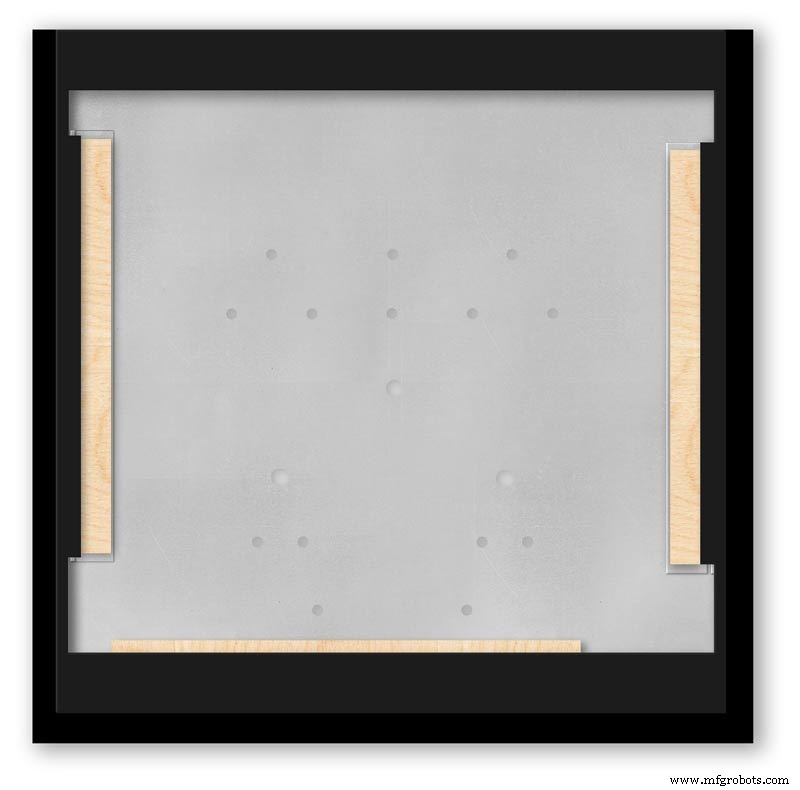
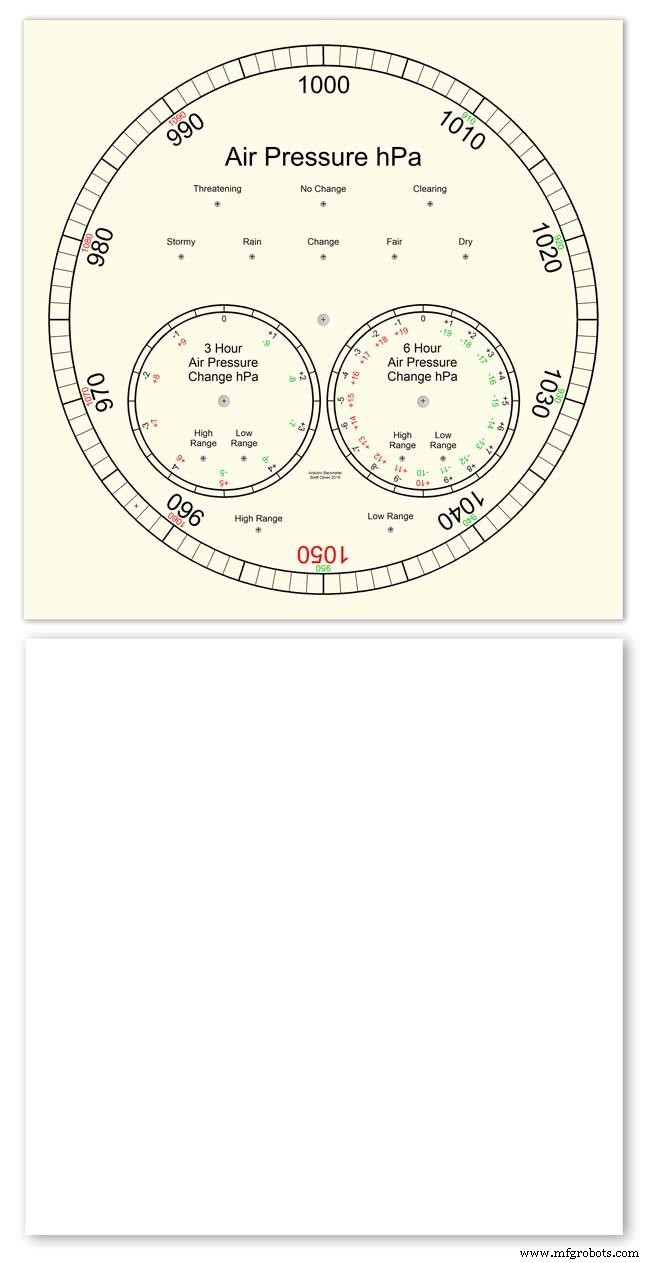
Pic.4 shows the front view with a transparent dial showing mounting locations.
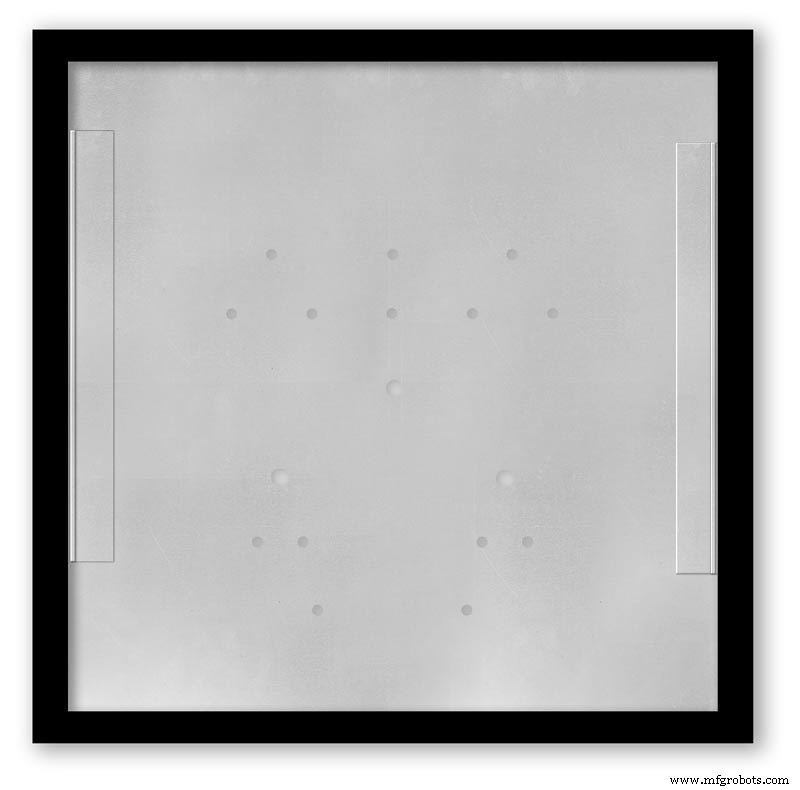
Pic. 5 shows the same but the rear view.
Pic.6 shows the wooden mounting blocks locations and layout.
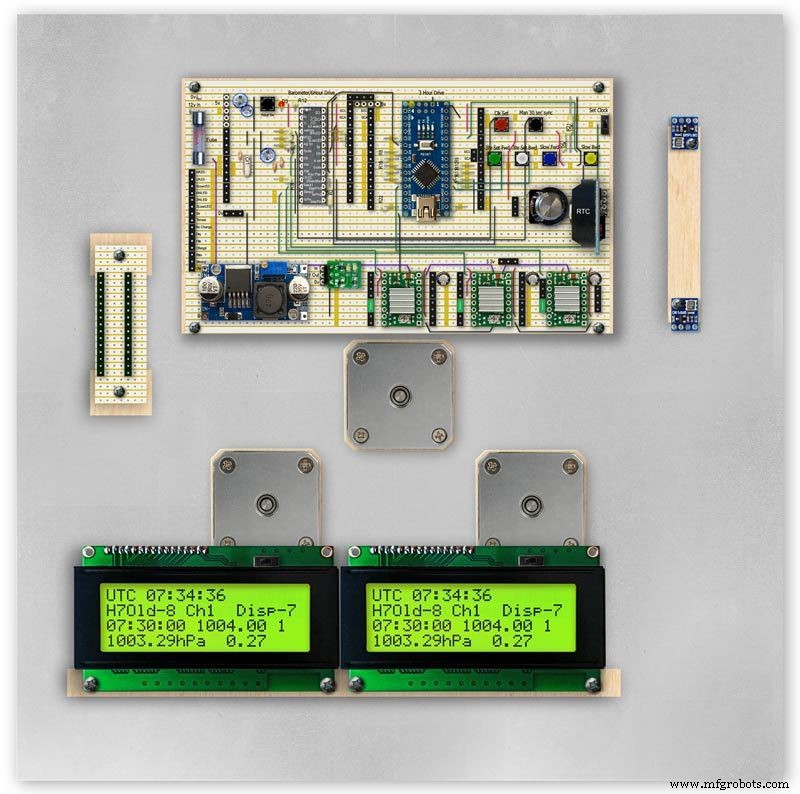
Pic.7 shows the modules and motors mounted on the blocks.
Step 16:Construction LED Fixing


The 3mm LEDs are mounted so they just show above the surface of the dial pic.1.
3mm holes are drilled and hot melt glue holds them in place.
To get a uniform depth I made a jig using a washer and piece of card glued to it pic.2.When fixing the LEDs the jig is pressed against the dial with the depth of the washer setting the protrusion of the LED through the dial.
Step 17:Construction Classic Style English Dial Clock Case





The classic 12" Dial Clock case can be purchased from Ebay as "case only" pic.1.
Various styles are available this one is oak and has a dial surround that hinges away from the back box pic.2.
This makes for a very easy build as all the hard work has been done. The dial is mounted by 3 small wood screws hidden behind the brass dial bezel.
This dial surround has been stripped and bleached to bring out the original light colour of the wood pic.3.The dial was removed as it had a winding hole off center.
A new dial was cut from a sheet of alluminium pic.4.
Pic.5 side view of the Barometer showing the back box.
Pic.6 shows my regulator clock case with original curved back box, hinged dial bezel and pegged dial surround.
Many of these clock cases were held in place by four wooden pegs. If your case is constructed like this add a pair of hinges to one side and use the remaining two pegs to lock the dial surround in place.
Step 18:Construction Modern Case

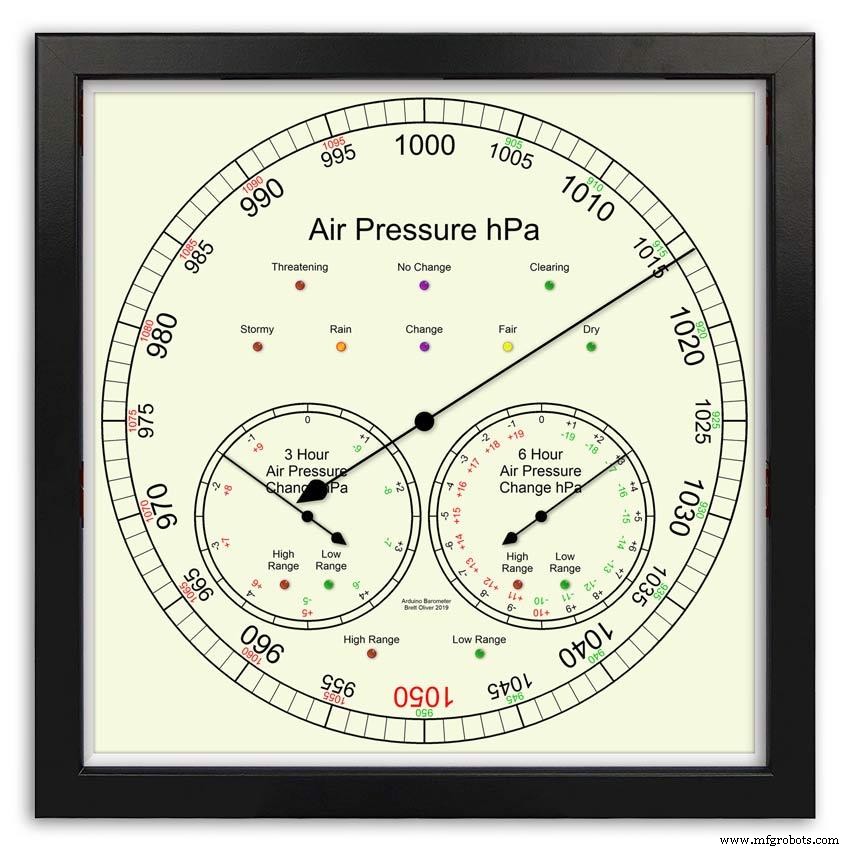


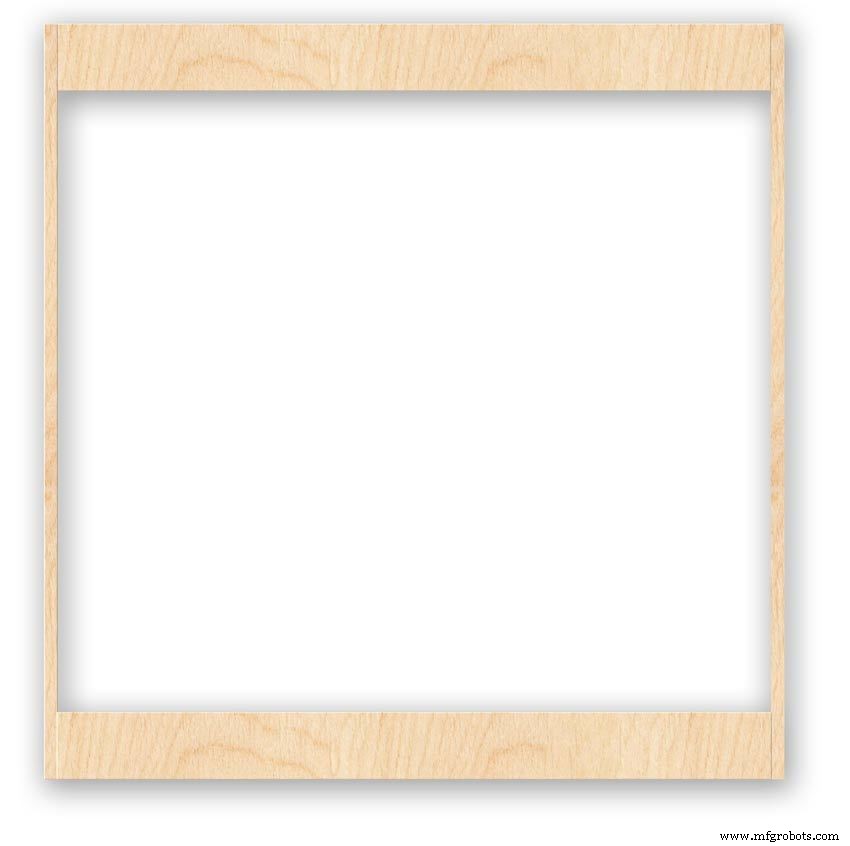
Picture Frame Version
I have used two identical picture frames mounted back to back. These frames are 30cm x 30cm approx. 12"x12" pic.1.
pic.2 Frames are joined back to back.
pic.3 This gives a double depth frame.
pic.4 Rear side view showing wired boards and modules.
pic.5 The dial viewed through the rear frame.
pic.6 Rear half of the frame with all wiring in place.
pic.7 The front of the dial now shows through the front half of the frame. Wooden bevels hide the space behind the front half of the frame.
Step 19:Construction Modern Case Backbox


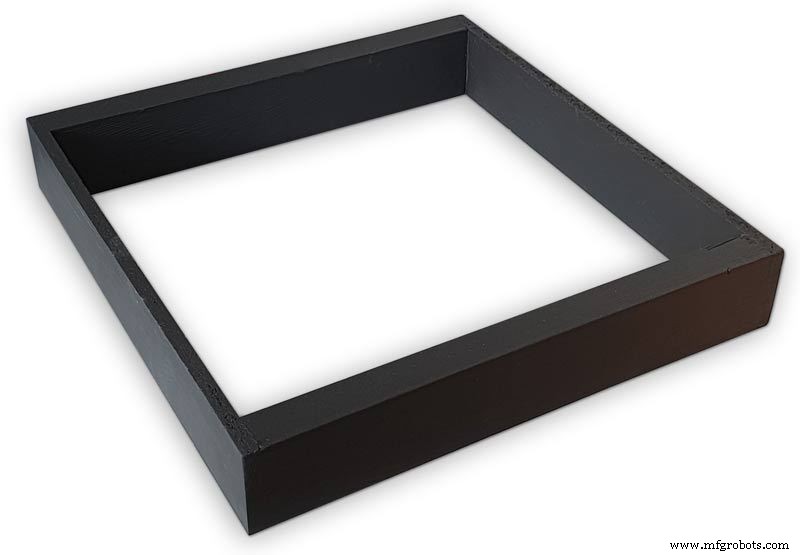

Back Box
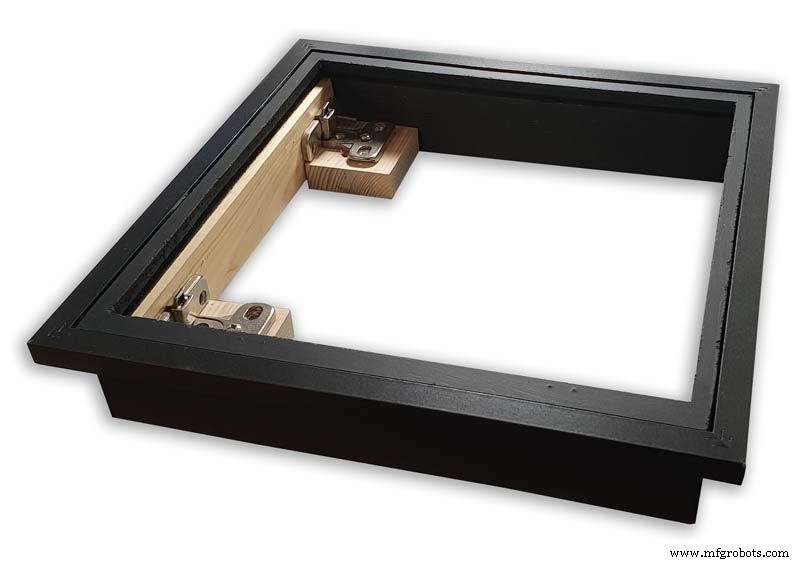
Pic.1 The barometer is housed in a back box that is smaller than the dial frame on all side apart from the top. The fram overlap helps hide the back box and adds a shadow effect to the case on the wall.
Pic.2 The back box is 50mm deep and is simply constructed of glued and screwed wood.
Pic.3 Rear view of back box in position behind rear dial frame showing the frame overlap.
Pic.4 The screw holes are filled then a coat of matt black is applied to the back box.
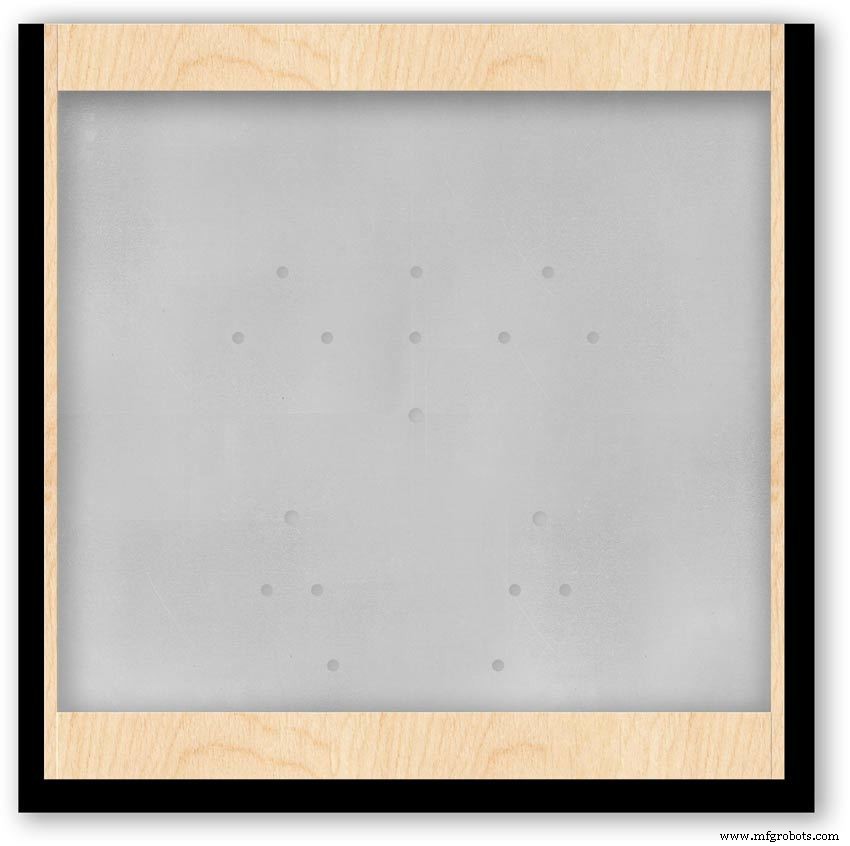
Pic.5 Back box with rear picture frame in place this holds the dial.Note the rear frame is placed upside down.
Pic.6 A spacer is cut the same size and depth as the recess of the picture frame.
Pic.7 The spacer is set under the dial.
Pic.8 This will raise the dial level with the top edge of the rear frame.
Pic.9 Back box with front picture frame in place on top of the rear frame.This frame holds the glass.
Step 20:Construction Modern Case Wall Mounting








Mounting the Barometer
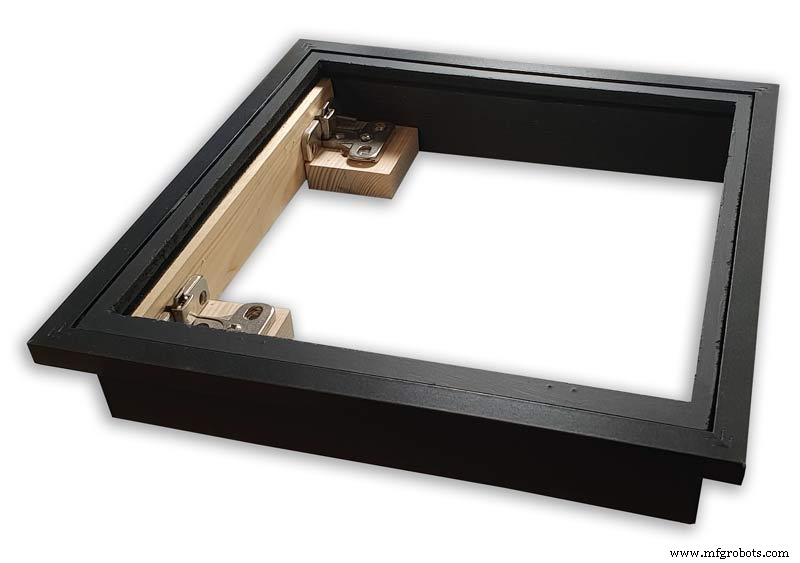
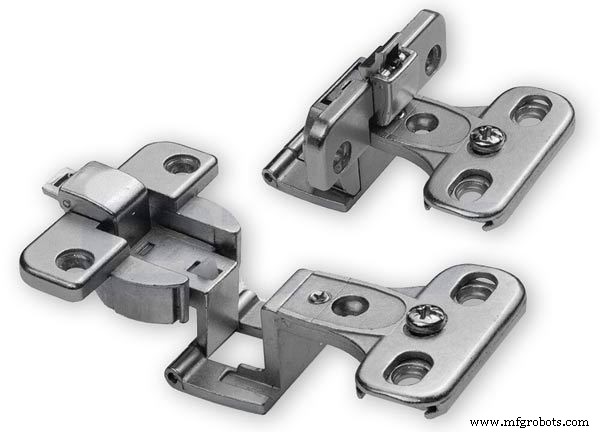
Pic.1 To allow access to the rear of the Barometer I have mounted it on a pair of GTV 270° inset hinges. The hinges are mounted on a block of wood fixed to the wall and allow the barometer to be swung out for access. The hinges also have a quick release function if the Barometer needs to be taken down for maintenance at any time. The hinge pivot is set back which also allows the top of the case to clear the wall when hinged out.
Pic.2 The hinges are mounted on wooden blocks screwed to the wall.
Pic.3 I have screwed and glued an extra piece of timber to the left hand side where the hinges will mount.This will add strength as all the weight of the clock will be on this side when the clock case is open. Two aluminium plates will cover the hinge holes.
Pic.4 Hinge blocks in place. Note these are bolted through the case rather than screwed.
Pic.5 Back Box mounted on the wall. The fixing screws also hold the hinge to the wooden mounting blocks The wooden baton on the right is also fixed to the wall and supports the top right hand corner of the back box. It also serves as a fixing point for the wall mount locking pins that holds the back box shut against the wall.
Pic.6 The back box is shown open with the wooden mounting blocks and batons fixed to the wall. The hole in the front edge of the baton aligns with a hole in the side of the back box. A steel pin is inserted here to lock the barometer shut against the wall.
Pic.7 Back box open allowing access to the LCD displays and setting switches.
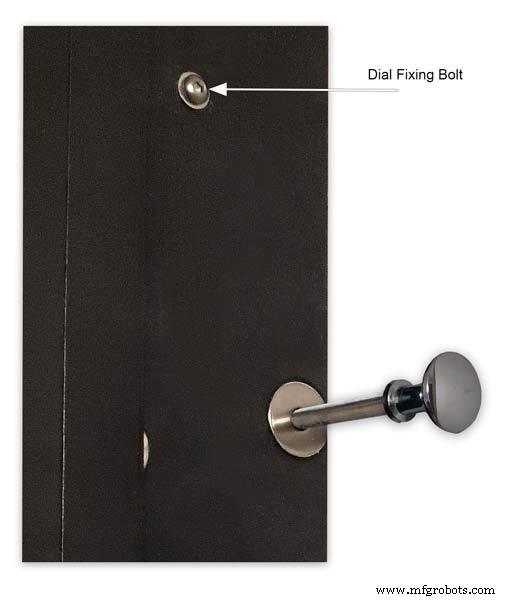
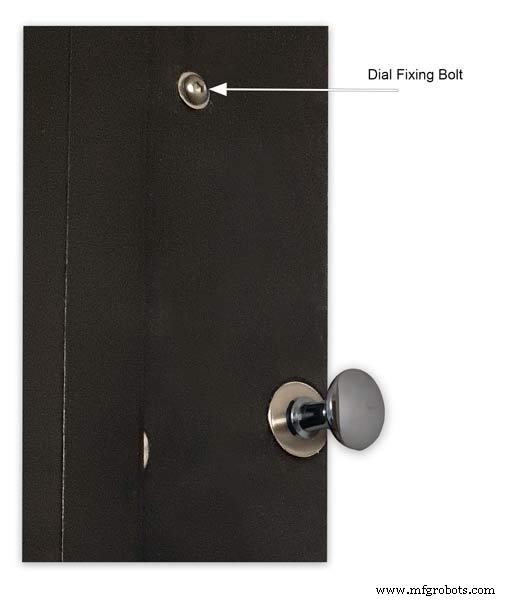
Pic.8 Steel Locking Pin This is a small cabinet knob with a length of treaded bar screwed into the thread.
Pic.9 &10 The locking pin when pushed fully in lock the barometer against the wall. When pulled out the barometer is able to swing out to allow access to the control switched and LCD displays.
Pic.11 Detail of Locking Pin and location of right side dial fixing bolt. I have glued a washer in place over the hole as an escutcheon plate.
Step 21:Construction Modern Case Dial Mounting



The dial and all the boards etc are removable for maintenance and is held to the backbox by 2 bolts.
Mounting the Dial in the Back Box
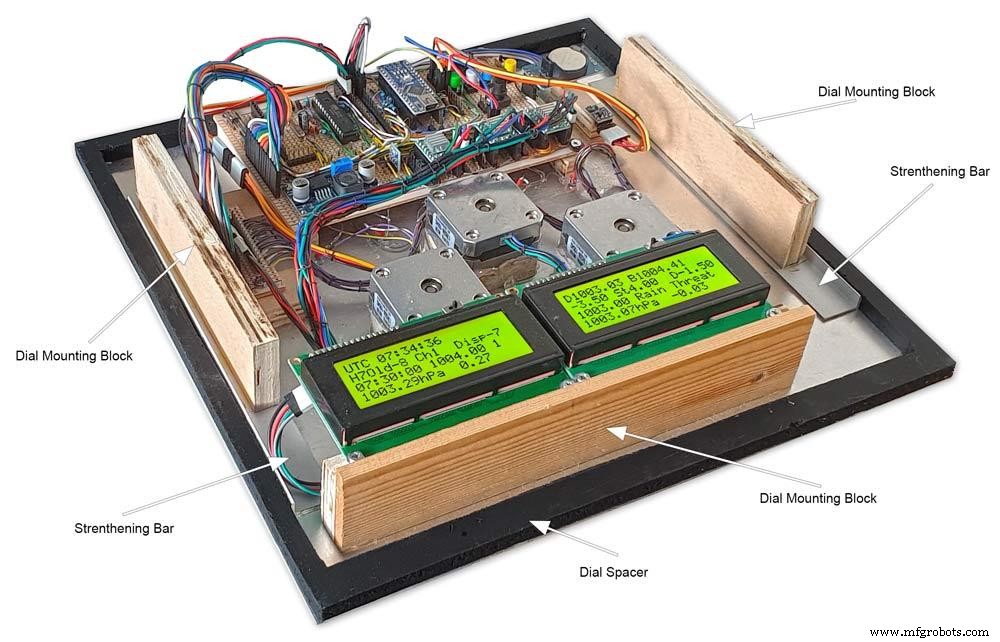
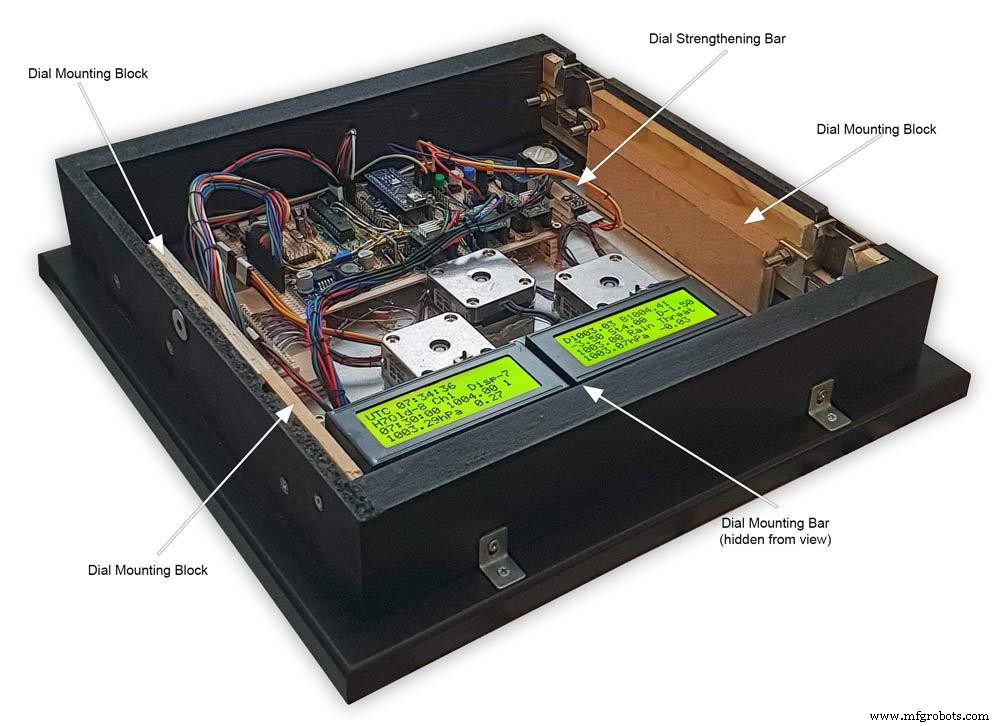
The dial holds the combined weight of all the stepper motors, boards and modules and is stiffened by impact gluing two strips of unequal aluminium angle to it's rear surface.Two blocks of wood are then glued to these bars and small screws then hold these wooden blocks through the side of the back box. A further thin strip of wood is glued to the dial below the LCD mounting block. This is not screwed to the case but sits on the back box to support the dial.
Pic.1 Strengthening bar of alluminium unequal angle.
Pic.2 Strengthening bar locations.
Pic.3 Glued wooden fixing/support blocks for dial fixing bolts left and right and glued dial support lower.
Pic.4 Shows contact/fixing points between the back box and dial. Back box in black with dial fixings/support in wood.
Pic.5 Rear view showing mounting block and bar locations.
Pic.6 Dial with Back Box Removed showing mounting blocks and strengthening bars glued to the rear of the dial.
The dial spacer allows the dial to sit flush with the top of the rear picture frame.
Pic.7 Right side of clock showing dial fixing bolt location.
Pic.8 A mount is constructed from 4 thin strips of wood and is placed in the recess of the front picture frame. This fills the gap between the picture frame and dial, holds the Perspex sheet in place and also adds a photo mount effect to the dial.
Pic.9 Mount in place behind the front picture frame.
Step 22:Contruction Dial

Pic.1 The dial is made from 1.5mm thick alluminium sheet and comes covered with a protective plastic film.
Pic.2 From your cad program print out the dial on A3 paper and include center marks for all the LED and stepper motor shaft holes.This will be your drill template.Lay the paper of the alluminium dial blank and tape the edges to stop it moving.Center punch all the holes through the paper.
Pic.3 Remove the paper template and drill out the holes 3mm for the LEDs and 3 larger holes for your stepper motor spindle.
Start with a small pilot hole and increase the drill size in 3 stages. If you are using a round dial mark it out on the projective film with a market pen and cut it out at this stage.
Pic.4 The protective plastic film can now be removed. Rub down the dial back and front to remove any burrs and to provide a key for the paint.
Pic.5 Spray a coat of acrylic primer and then your choice of top coat - I have used antique white.
I then give a final coat of matt clear acrylic. Leave to dry over night.
I have included a high res pic of the dial pic.6. Contact me if you need it in another format. My CAD format is TurboCad.
Step 23:Construction Dial Decal

Apply the water slide decal transfer.
I use Water Slide Decal paper from BIGBITE Studio They have some good tutorials on their site. https://www.bigbitestudio.co.uk/tutorials/water-decal-tutorials/
Pic.1 Water slide decals are printed out on an inkjet printer soaked in water then slid into place. They give a very detailed print and once given a coat of varnish are tough.
Don't forget to order transparent transfers so the dial colour can be seen through the transfer.Follow the instructions with the pack as they do vary.
Pic.2 On my transfers I print out the dial on transfer paper let it dry and then cut it out to just under the size of the dial. I then give it a coat of acrylic varnish.
I set my printer as follows:Plain Paper, Photo &High Speed Off This stops my printer from over inking the paper When the varnish is dry the transfer is soaked in water until the transparent transfer comes away from the white backing sheet.
Pic.3 Move the soaked transfer over the dial.
Pic.4 Slide the transfer into position.
Pic.5 Gently pull the white backing paper backward while holding the transfer down.
Make sure the crosses line up with the center of all the holes.
Pic.6 Get rid of any air bubbles.
Pic.7 Then leave it to dry before adding a coat of matt varnish.
After the coat of varnish break through the layer of transfer over the holes using the back of a drill bit jus smaller than the holes. Then give a final coat of varnish to seal the edges around the holes.
Step 24:Construction Hands



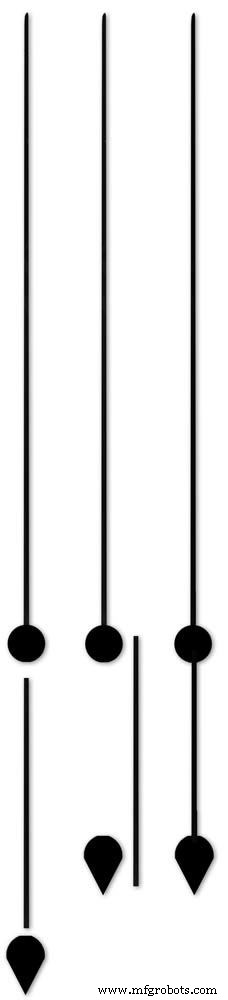






Hands are a very personnal choice and there are many diffent styles to choose from. The hardest part is finding hands that match each other. I found a perfect set of small hands but was unable to find a matching longhand for the main barometer. In the end I made my own from 3 donor hands.
All my hands were quartz second hands so I hand to file the mounting spindle off the back for mounting on the stepper motor spindle.
On some stepper motors the spindle can be drilled out to take the hand spindle but my spindles were too hard to drill.
Pic.1 my completed hands.
Pic.2 The long barometer hand was constructed from 3 different hands
Pic.3 To get the lower spade balance part of the hand I used a spade hand.
Pic.4 First I cut off the top using sharp scissors.
Pic.5 The top was then trimmed by cutting the point off.
Pic.6 The remaining part was then filed away to match the shape of the 2 smaller hands.
Pic.7 The completed balance for the hand.
Pic.8 To make the front pointer and center I cut the end off one off my donor hands.
Pic.9 To make the rear balance shaft I cut a section out of the 3rd donor hand.
Pic.10 Left the 3 parts of the new hand. Middle shows the overlap of the balance shaft to allow for bonding. Right pic shows the balance shaft bonded with impact adhesive to the underside of the balance and center shaft.
To fix the hands to the stepper motor spindle I did not want to use impact adhesive as the hands are fragile and would be damaged if I hand to remove them. In the end I went for a tiny bit of Blu Tack on each hand. Blu Tack is putty like and is non setting but seems to hold very well!
Step 25:Construction Schematic
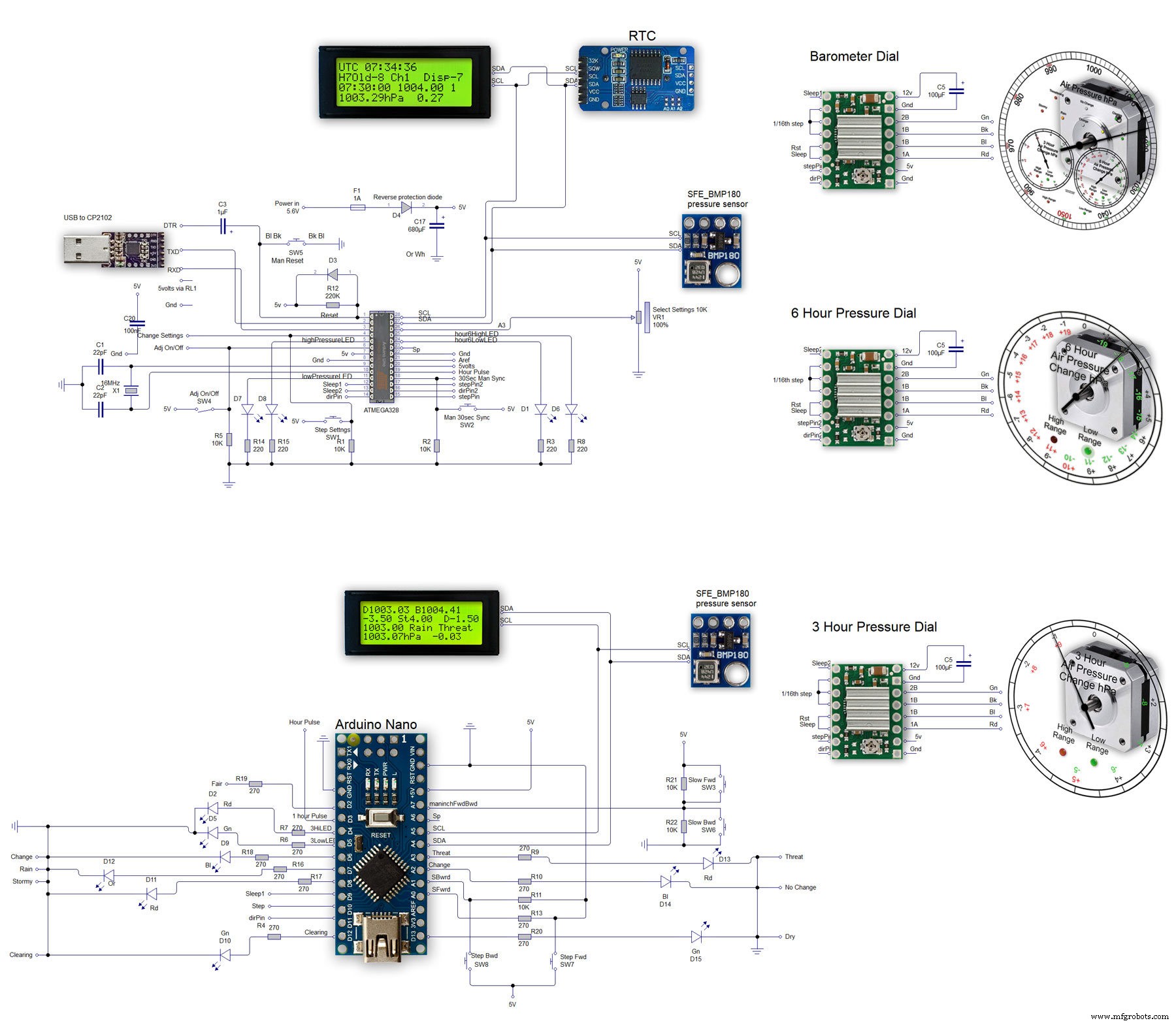
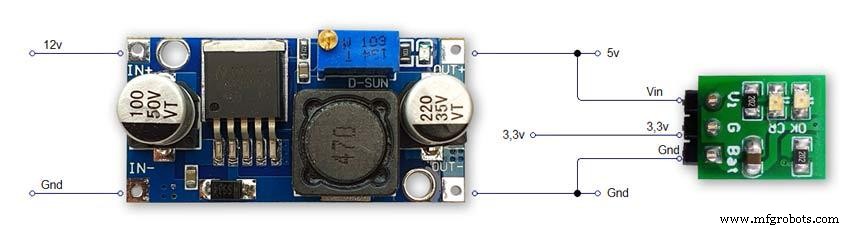
The main shematic is shown in Pic. 1 with the power supply in Pic.2.
You will also need a regulated plug in 12v supply adaptor of around 1amp.
Note I have fitted switches on the LCD displays to turn the backlight LEDs On and Off. This is optional but as the displays are not visible for 99.99% of the time it will save power.
Note larger schematics can be found on my web site here
Step 26:Construction Vero Board
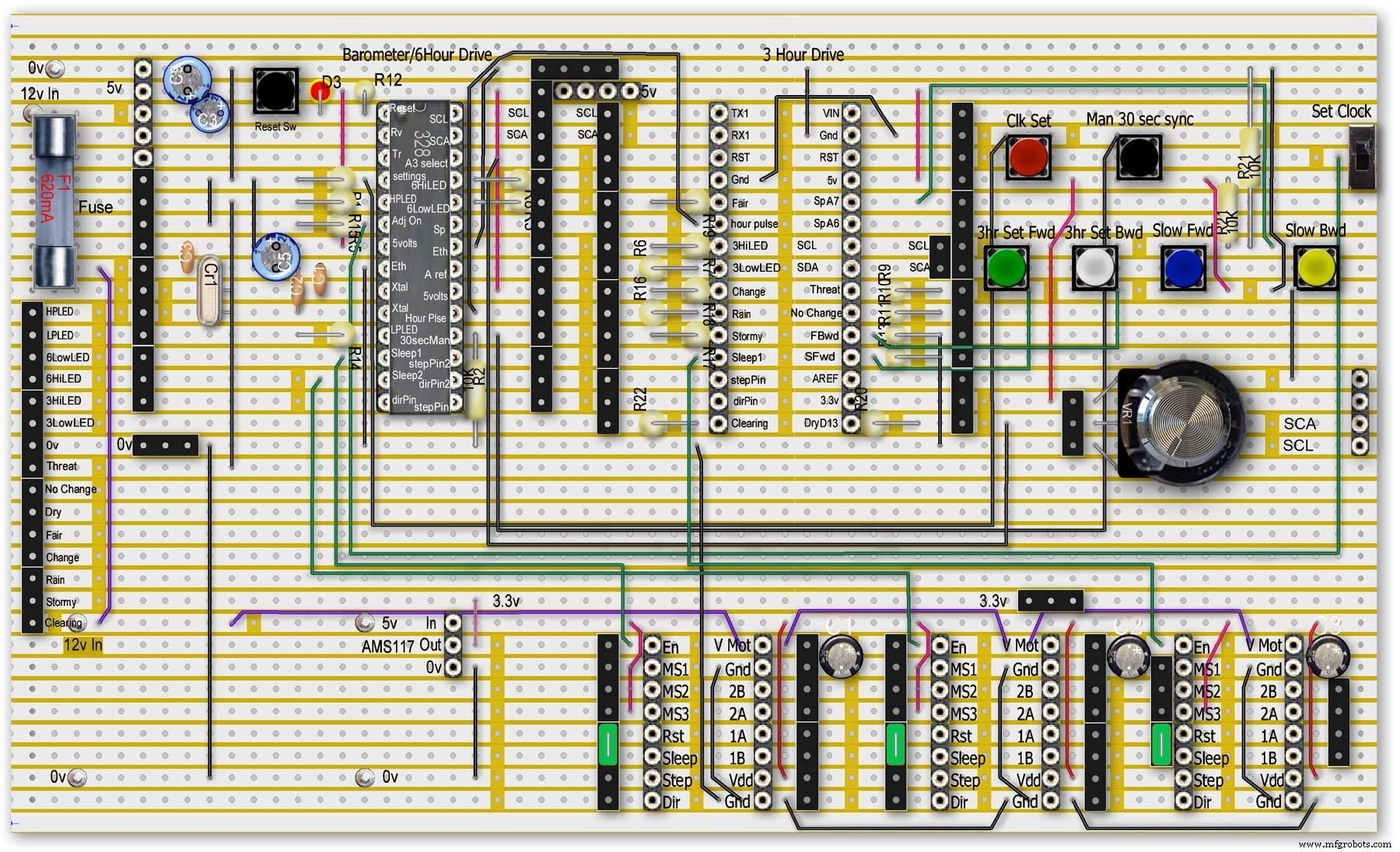
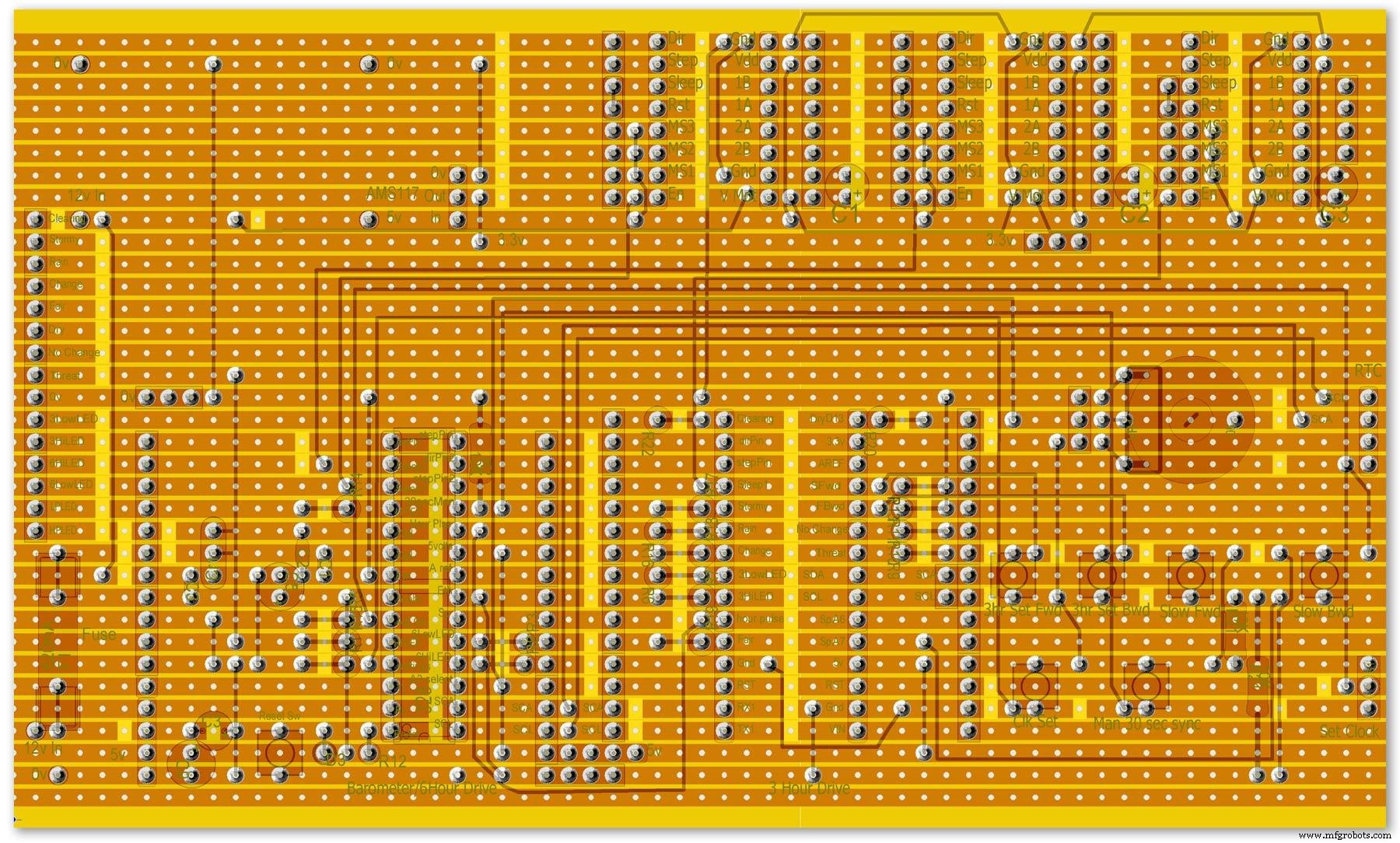

Vero Board Layouts
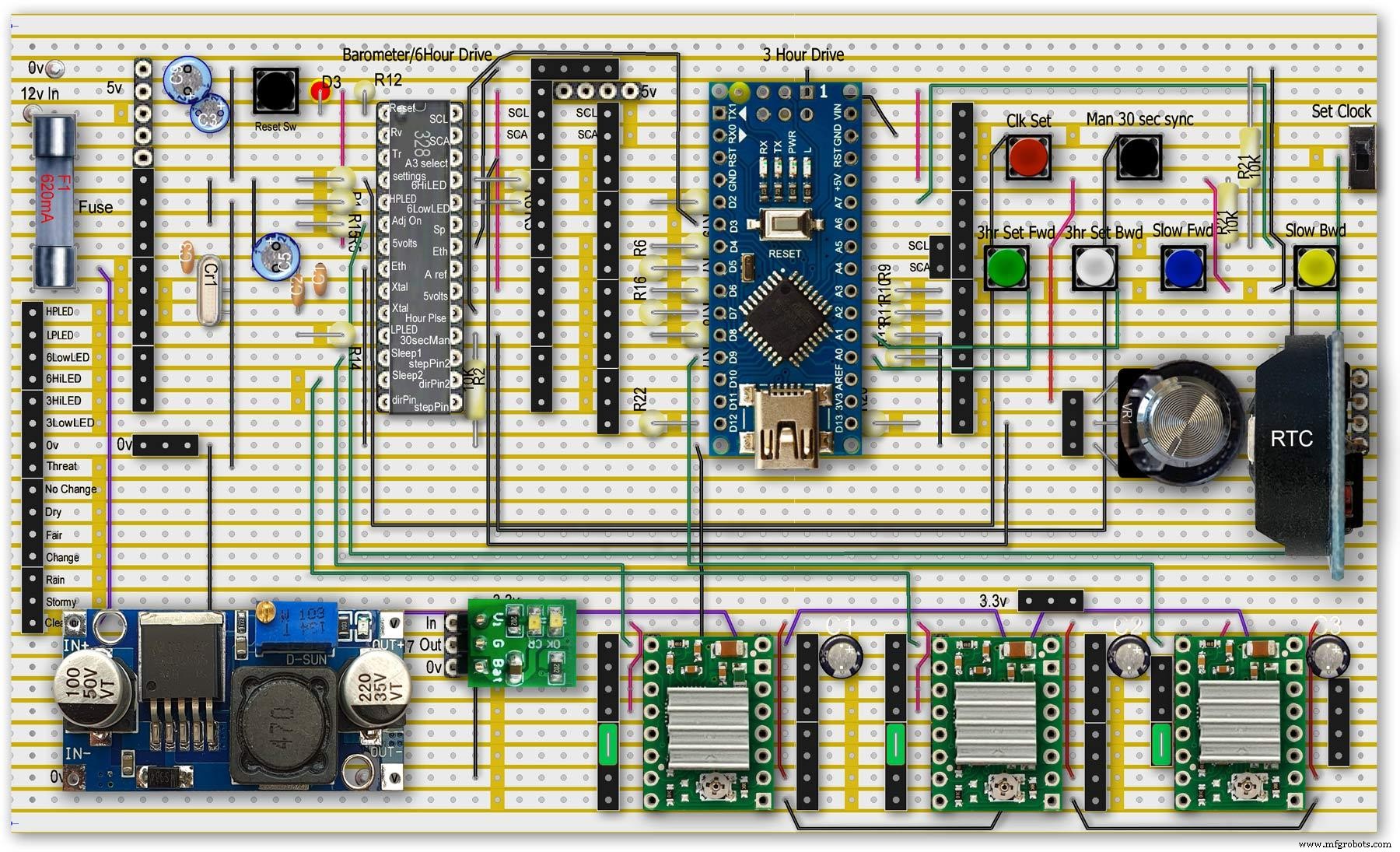
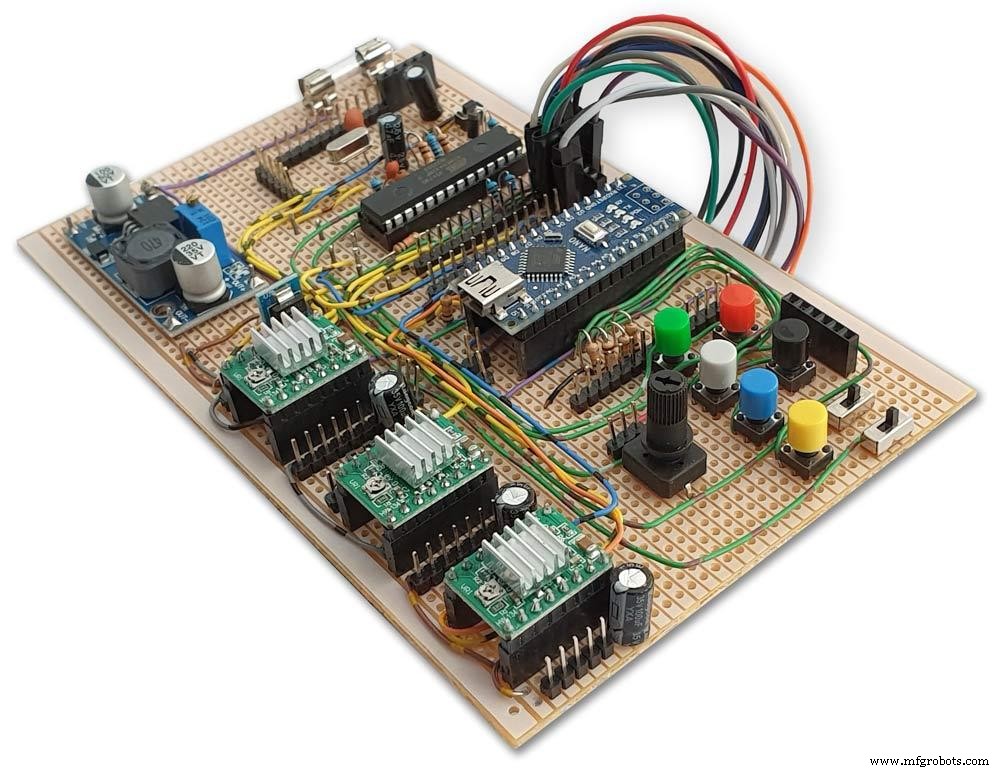
Pic.1 Vero Board with all modules removed.
Pic.2 Vero Board with modules in place.
Pic.3 Vero Board rear view (flipped down from top).
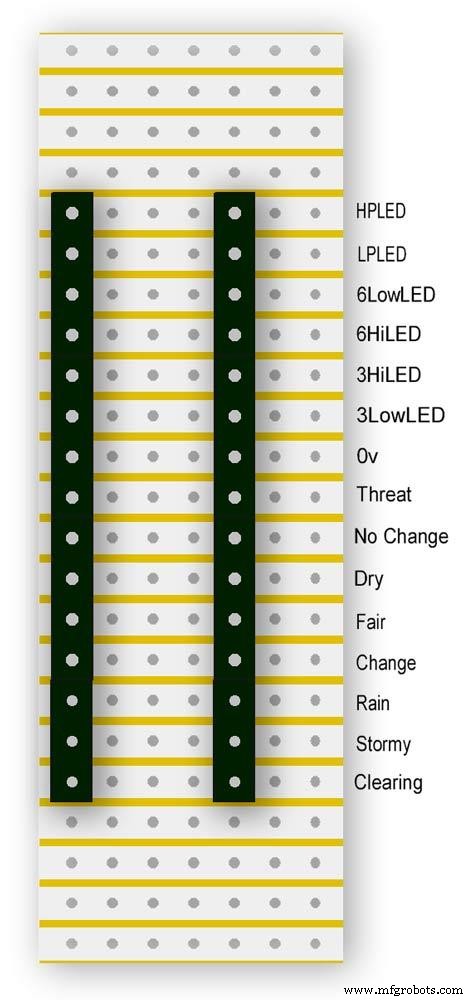
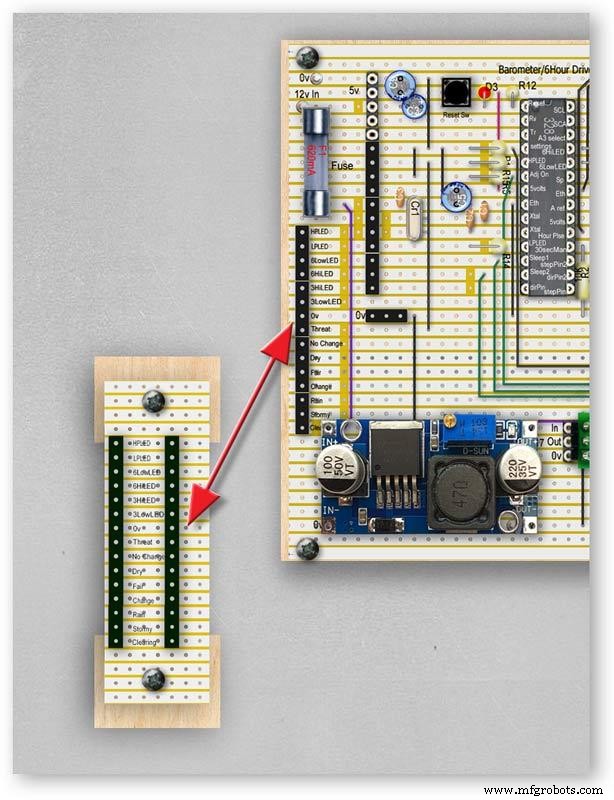
Pic.4 LED Vero Board
This board is used as a connection point for the dial LEDs. This allows the dial to be disconnected from the main board if required for maintenance.
Pic.5 The LED Vero Board connects to the main board with Dupont sockets and male Dupont cable
Pic.6 Vero Board wiring in progress.
Pic.7 Vero Boards and module location on the rear of the dial.
Step 27:Code
Code
There are 2 parts to the code 1 for the Main Barometer Code and 6 hour display and 1 for the 3 hour display and weather forecast.
Step 28:Time-Lapse Video
Time-Lapse Video showing rain radar and the Barometer predicting rain and a storm.
This is a 4K video so you should be able to see full details of the dial and forecast LEDs.
Code
- BarometerA4988_23.ino
- BarometerA4988_3hour__21.ino
BarometerA4988_23.inoArduino
Main file for Barometer and 6 hour display/* Example sketch to control a 28BYJ-48 stepper motor with ULN2003 driver board, AccelStepper and Arduino UNO:number of steps/revolutions. More info:https://www.makerguides.com v4 moved step 6 hour pressure step from void getpressure 1523 to main loop check every hour 365v5 remove unwamted step elementsv6 convert to diff display on 6 hr motorv8 modified hour change formula 1486v9 sleepv10 chnged high/low for EN control v11 chenge calc for hour change 1380v12 added calcCurrentDisp (); to calc current time from line 1384v13 removed 30 sec syncv14 air pressure extremes LEDsv15 add hour diff hour calc etc to row 1 when not on settingsv16 adding 16th stepsv17 errorv18 change min pulse to hour pulse on the hour + 1minv19 check enable and sleepsv20 added DAC to NANO so pins changed on 328 to match (analogue and digital swapped A6 D3 - deleted v20 also changed Low range hi range to both light above 19 or -19v21 same as 20 with serial print removedv23 notes added LCD display info added to startup */#include//SFE_BMP180 pressure sensor#include #include #include // ######## You will need to create an SFE_BMP180 object, here called "pressure":SFE_BMP180 pressure;#define ALTITUDE 118.0 // Altitude of Kenley Surrey in meters// also used to adjust/sync/calibrate to nearby weather station/3 hour display//#########//**********************// set the LCD address to 0x27 for a 20 chars 4 line display// Set the pins on the I2C chip us ed for LCD connections:// addr, en,rw,rs,d4,d5,d6,d7,bl,blpolLiquidCrystal_I2C lcd(0x27, 2, 1, 0, 4, 5, 6, 7, 3, POSITIVE); // Set the LCD I2C address#define DS3231_I2C_ADDRESS 0x68// Convert normal decimal numbers to binary coded decimalbyte decToBcd(byte val){ return( (val/10*16) + (val%10) );}// Convert binary coded decimal to normal decimal numbersbyte bcdToDec(byte val){ return( (val/16*10) + (val%16) );}// Include the AccelStepper library:#include // Define stepper motor connections and motor interface type. Motor interface type must be set to 1 when using a driver:#define dirPin 8#define stepPin 9#define dirPin2 10#define stepPin2 11#define motorInterfaceType 1// Create a new instance of the AccelStepper class:AccelStepper stepper =AccelStepper(motorInterfaceType, stepPin, dirPin);//barometer motorAccelStepper stepper2 =AccelStepper(motorInterfaceType, stepPin2, dirPin2);// 6 hour motorfloat seaPressure =0;float pressureNow =0;float pressurePrevious =0;float pressureDiff =0;int checkStop =0;int pressureRndDiff =0;int pressureRndNow =0;int pressureRndPrevious =0;int adjustOn =4; // allows adjustment of barometer// int test =0; // test mode 0 off 1 is onchar status; double T,P,a;//int h =0;//int m =0;//int j =0;int stepcount =0;int time =0;int resetmins =1;int secondNow =0;int secondPrevious=0;int minuteNow =0;int minutePrevious=0;int hourNow =0;int hourPrevious=0;int hourNow1=0;int hourPrevious1=0;int initial =0;int initial1 =0;int initial3 =0;int highPressureLED =3;int lowPressureLED =5;int hour6LowLED =15;int hour6HighLED =16;int manSync =12; // resets seconds to 30 secondsint changeSetting =2;int syncStop =0;int sync30Stop =0;int stepoffHour =0;int stepoffHourbkw =0;int stepoffMin =0;int stepoffMinbwd =0;int stepoffRTCminfwd =0;int stepoffRTCminbwd =0;int stepoffRTChourfwd =0;int stepoffRTChourbwd =0;int settingreadPin =A3; //Pin for sensing analogue value from potint settingVal =0; // Analogue value 0-1023int LCDstop =0; // stops settings on LCD display refreshing until they changeint hourPulse =13; //min pulse for seconds display was 14int adjustLock =0; // turns off adjust lockint hourcalc =0; // number from 0 to 7 representing the 8 hours of stored pressure readings int hourDiff =0; // used to check if 6hour previous motor should be stepped.int hourChange =0; // the amount of 6 hour to stepint currentDisplay =0; //current 6hour change readingint hour0 =1013; // you can set last 8 hours pressure here or leave at 0 and theint hour1 =1014; // readings will catch up over the next 8 hoursint hour2 =1015;int hour3 =1016;int hour4 =1016;int hour5 =1016;int hour6 =1012;int hour7 =1013;int sleep1 =6;int sleep2 =7;// check air pressure here https://www.meteoplug.com/cgi-bin/meteochart.cgi?draw=a3aeaaa1acbdf9f1fcfed4fedbc2c094c0d6d6d1d2c5edcebbfee9ffeff1fbf9//int Disp3hrIn =A3;//int Disp3hrVal =0;void setup() { pinMode(adjustOn, INPUT); pinMode(hourPulse, OUTPUT); pinMode(highPressureLED, OUTPUT); pinMode(lowPressureLED, OUTPUT); pinMode(hour6LowLED, OUTPUT); pinMode(hour6HighLED, OUTPUT); pinMode(manSync, INPUT); pinMode(sleep1, OUTPUT); pinMode(sleep2, OUTPUT); pinMode(settingreadPin, INPUT); // Set the maximum steps per second:stepper.setMaxSpeed(1000); stepper2.setMaxSpeed(1000); lcd.begin(20,4); // initialize the lcd for 20 chars 4 lines, turn on backlight lcd.backlight(); // backlight on not needed as man controlled lcd.setCursor(0,0); //Start at character 0 on line 0 lcd.print("Barometer A988"); //@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@ lcd.setCursor(0,1); //Start at character 0 on line 1 lcd.print(" Version 23"); //@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@ { Wire.begin(); Serial.begin(9600); // set the initial time here:// DS3231 seconds, minutes, hours, day, date, month, year // setDS3231time(10,42,9,5,18,12,19);//delay(2000);lcd.clear();}Serial.println("REBOOT");// serial removed // Initialize the sensor (it is important to get calibration values stored on the device). if (pressure.begin()) Serial.println("BMP180 init success");// serial removed else { // Oops, something went wrong, this is usually a connection problem, // see the comments at the top of this sketch for the proper connections. Serial.println("BMP180 init fail\n\n");// serial removed while(1); // Pause forever. } //LED TestdigitalWrite(hour6HighLED, HIGH);delay (500);digitalWrite(hour6HighLED, LOW);digitalWrite(hour6LowLED, HIGH);delay (500);digitalWrite(hour6LowLED, LOW);digitalWrite(highPressureLED, HIGH);delay (500);digitalWrite(highPressureLED, LOW);digitalWrite(lowPressureLED, HIGH);delay (500);digitalWrite(lowPressureLED, LOW);delay (500);lcd.clear();getPressure ();// gets all pressure readings// Disp readings on startup so hands can be set lcd.setCursor(0,1); lcd.print(" "); lcd.setCursor(0,1) ; lcd.print("H"); lcd.print(hourcalc); lcd.setCursor(2,1); lcd.print(" "); lcd.setCursor(2,1); lcd.print("Old"); lcd.print(currentDisplay); lcd.setCursor(13,1); lcd.print(" "); lcd.setCursor(13,1); lcd.print("Disp"); lcd.print(hourDiff); //disable motors on startupdigitalWrite(sleep1, HIGH);digitalWrite(sleep2, HIGH);stepper.disableOutputs();stepper2.disableOutputs();// test =1; // test set to 0 off 1 on}void loop() { if( digitalRead(adjustOn) ==HIGH || adjustLock ==1)// only alow settings when change settings switch is ON{ //digitalWrite(sleep1, LOW);//enable on //digitalWrite(sleep2, LOW);//enable on only enable outputs for 2 mins Settings(); //set what function the setiing switches have adjustLock =1; //hold on adjustment if( digitalRead(adjustOn) ==LOW){//digitalWrite(sleep1, HIGH);//disable on//digitalWrite(sleep2, HIGH);//enable on only enable outputs for 2 minsadjustLock =0; //hold on adjustment } }// only allow settings change when setting switch is on // displayTime(); // display the real-time clock data on the Serial Monitor, byte second, minute, hour, dayOfWeek, dayOfMonth, month, year; // retrieve data from DS3231 readDS3231time(&second, &minute, &hour, &dayOfWeek, &dayOfMonth, &month, &year);//@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@ //enable air pressure readings if (minute ==9 || minute ==19 || minute ==29 || minute ==39 || minute ==49 || minute ==59 &&second ==59) { checkStop =0;// resets checkstop to allow air pressure readings every 10 mins }//check air pressure every 10 mins if (checkStop ==0) { if ( minute ==0 || minute ==10 || minute ==20 || minute ==30 || minute ==40 || minute ==50 ) { //digitalWrite(sleep1, LOW);//enable on -only enable outputs for 1 min // only sleep1 needs activation getPressure ();// gets all pressure readings checkStop =1;// stops multiple readings of air pressure }// else //digitalWrite(sleep1, HIGH);//enable off // Serial.print("Sleep 1 HIGH (off) "); // Serial.println(hourChange); } //@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@if(digitalRead(manSync)==HIGH)// resets seconds to 30{ setDS3231time(30, minute, hour, dayOfWeek, dayOfMonth, month, year); //Set seconds to 30 on RTC } // counts seconds secondNow =second; if(secondNow!=secondPrevious || initial) { lcd.setCursor(0,0); lcd.print("UTC "); if(hour<10) { lcd.print(0); } lcd.print(hour); lcd.print(":"); if(minute<10) { lcd.print(0); } lcd.print(minute); lcd.print(":"); if(second<10) { lcd.print(0); } lcd.print(second); lcd.print(" "); // Serial.print("-1*0 ");// Serial.println(-1*0); initial =0; secondPrevious =secondNow; } // count minutes minuteNow =minute; if(minuteNow!=minutePrevious || initial) //settingVal <690 stops clock motors operating when setting RTC { initial =0; minutePrevious =minuteNow; // digitalWrite(minPulse,HIGH);//1 min pulse for seconds display sync syncStop =0;// clock will not sync again untill a new minute has started. // digitalWrite(minPulse,LOW);//1 min pulse for seconds display sync } // counts hours + 1min for hourPulse at 15 seconds past the hour this allows barometer and 6 hour dial to step first if ( minute ==0 &&second ==15) // send hour pulse 15 seconds past the hour to 3 hour circuit allows other motors to stop { digitalWrite(hourPulse,HIGH); digitalWrite(highPressureLED,HIGH); // Serial.println("hourPulse Hi "); } else if (minute !=1 || second !=0) { digitalWrite(hourPulse,LOW);digitalWrite(highPressureLED,LOW); }// counts hours hourNow =hour; if ((minute ==59 &&second> 50) || (minute ==0 &&second <10) )// allows change on the hour only {// digitalWrite(sleep2, LOW);// enable 6hr motor if(hourNow!=hourPrevious || initial) //settingVal <690 stops clock motors operating when setting RTC { initial =0; hourPrevious =hourNow;//print hour stores every hour // serial removed /* Serial.print("hour0 "); Serial.println(hour0); Serial.print("hour1 "); Serial.println(hour1); Serial.print("hour2 "); Serial.println(hour2); Serial.print("hour3 "); Serial.println(hour3); Serial.print("hour4 "); Serial.println(hour4); Serial.print("hour5 "); Serial.println(hour5); Serial.print("hour6 "); Serial.println(hour6); Serial.print("hour7 "); Serial.println(hour7); */ //##############################################################################//step 6 hour motorif (hourChange> 0 &&hourChange <40) // 6 hour motor will not step if diff> 10 { stephourFwd(); //Serial.print("Step 6 hour Forward ");// serial removed // Serial.println(hourChange);// serial removed hourChange =0; } else if (hourChange <0 &&hourChange> -40) // else if (hourDiff ==-1 || test ==1) { stephourBwd(); // Serial.print("Step 6 Hour Backward ");// serial removed // Serial.println(hourChange);// serial removed hourChange =0; } // hourChange =0; //############################################################################## } // digitalWrite(sleep2, HIGH);// disable 6hr motor// add LCD stop if(second==0) { // lcd.setCursor(0,1); //lcd.print(" "); lcd.setCursor(0,1) ; lcd.print(" "); lcd.setCursor(0,1) ; lcd.print("H"); lcd.print(hourcalc); lcd.setCursor(2,1); lcd.print(" "); lcd.setCursor(2,1); lcd.print("Old"); lcd.print(currentDisplay); lcd.setCursor(13,1); lcd.print(" "); lcd.setCursor(13,1); lcd.print("Disp"); lcd.print(hourDiff); } } } // Set Clock/Motors###################################################################################################//gets advance retard settings from potvoid Settings(){ settingVal =analogRead(settingreadPin); // read the value from the pot if ( settingVal>=0 &&settingVal <85 ) { setMinsfwd(); } if ( settingVal>=85 &&settingVal <170 ) { setMinsbwd(); } if ( settingVal>=170 &&settingVal <255 ) { setMinsslowfwd(); } if ( settingVal>=255 &&settingVal <340 ) { setMinsslowbkd(); } if ( settingVal>=340 &&settingVal <425 ) { setHoursfwd(); } if ( settingVal>=425 &&settingVal <510 ) { setHoursbwd(); } if ( settingVal>=510 &&settingVal <595 ) { setHoursslowfwd(); } if ( settingVal>=595 &&settingVal <690 ) { setHourslowbkd(); } if ( settingVal>=690 &&settingVal <765 ) { setRTCfwdmin(); } if ( settingVal>=765 &&settingVal <850 ) { setRTCbwdmin(); } if ( settingVal>=850 &&settingVal <900 ) { setRTCfwd(); } if ( settingVal>=900 &&settingVal <970 ) { setRTCbwd(); }if ( settingVal>=970 &&settingVal <1025 ) { } if ( settingVal>=0 &&settingVal <85 &&LCDstop==0)// LCDstop prevents the LCD from freshing until another item is selected { lcd.setCursor(0,1); lcd.print(" "); lcd.setCursor(0,1) ; lcd.print("Barometer Advance"); LCDstop=1; } if ( settingVal>=85 &&settingVal <170 &&LCDstop==1) { lcd.setCursor(0,1); lcd.print(" "); lcd.setCursor(0,1) ; lcd.print("Barometer Retard"); LCDstop=0; } if ( settingVal>=170 &&settingVal <255 &&LCDstop==0 ) { lcd.setCursor(0,1); lcd.print(" "); lcd.setCursor(0,1) ; lcd.print("Baro Inch Advance"); LCDstop=1; } if ( settingVal>=255 &&settingVal <340 &&LCDstop==1 ) { lcd.setCursor(0,1); lcd.print(" "); lcd.setCursor(0,1) ; lcd.print("Baro Inch Retard"); LCDstop=0; } if ( settingVal>=340 &&settingVal <425 &&LCDstop==0 ) { lcd.setCursor(0,1); lcd.print(" "); lcd.setCursor(0,1) ; lcd.print("6Hr Baro Advance"); LCDstop=1; } if ( settingVal>=425 &&settingVal <510 &&LCDstop==1 ) { lcd.setCursor(0,1); lcd.print(" "); lcd.setCursor(0,1) ; lcd.print("6Hr Baro Retard"); LCDstop=0; } if ( settingVal>=510 &&settingVal <595 &&LCDstop==0 ) { lcd.setCursor(0,1); lcd.print(" "); lcd.setCursor(0,1) ; lcd.print("6Hr Baro Inch Advn"); LCDstop=1; } if ( settingVal>=595 &&settingVal <690 &&LCDstop==1 ) { lcd.setCursor(0,1); lcd.print(" "); lcd.setCursor(0,1) ; lcd.print("6Hr Baro Inch Retard"); LCDstop=0; } if ( settingVal>=690 &&settingVal <765 &&LCDstop==0) { lcd.setCursor(0,1); lcd.print(" "); lcd.setCursor(0,1) ; lcd.print("RTC Min Advance"); LCDstop=1; } if ( settingVal>=765 &&settingVal <850 &&LCDstop==1 ) { lcd.setCursor(0,1); lcd.print(" "); lcd.setCursor(0,1) ; lcd.print("RTC Min Retard"); LCDstop=0; } if ( settingVal>=850 &&settingVal <900 &&LCDstop==0 ) { lcd.setCursor(0,1); lcd.print(" "); lcd.setCursor(0,1) ; lcd.print("RTC Hour Advance"); LCDstop=1; } if ( settingVal>=900 &&settingVal <970 &&LCDstop==1 ) { lcd.setCursor(0,1); lcd.print(" "); lcd.setCursor(0,1) ; lcd.print("RTC Hour Retard"); LCDstop=0; } if ( settingVal>=970 &&settingVal <1025 &&LCDstop==0 ) { lcd.setCursor(0,1); lcd.print(" "); lcd.setCursor(0,1) ; lcd.print("OFF"); LCDstop=1; } }// END of Loop// set RTC min forward 1 min per press ##################################################################################void setRTCfwdmin(){ if( digitalRead(changeSetting) ==HIGH &&stepoffRTCminfwd ==0 ) { byte second, minute, hour, dayOfWeek, dayOfMonth, month, year; // retrieve data from DS3231 readDS3231time(&second, &minute, &hour, &dayOfWeek, &dayOfMonth, &month, &year); minute =minute+1; if (minute ==60) { minute =0; } setDS3231time(second, minute, hour, dayOfWeek, dayOfMonth, month, year); //Set seconds to 30 on RTC stepoffRTCminfwd =1; } if( digitalRead(changeSetting) ==LOW ) { stepoffRTCminfwd =0; }}//##################################################################################// set RTC min backward 1 min per press ##################################################################################void setRTCbwdmin(){ if( digitalRead(changeSetting) ==HIGH &&stepoffRTCminbwd ==0 ) { byte second, minute, hour, dayOfWeek, dayOfMonth, month, year; // retrieve data from DS3231 readDS3231time(&second, &minute, &hour, &dayOfWeek, &dayOfMonth, &month, &year); minute =minute-1; if (minute <1) { minute =59; } setDS3231time(second, minute, hour, dayOfWeek, dayOfMonth, month, year); //Set seconds to 30 on RTC stepoffRTCminbwd =1; } if( digitalRead(changeSetting) ==LOW ) { stepoffRTCminbwd =0; }}//##################################################################################//###################################################################################################// set RTC hour forward 1 hour per press ##################################################################################void setRTCfwd(){ if( digitalRead(changeSetting) ==HIGH &&stepoffRTChourfwd ==0 ) { byte second, minute, hour, dayOfWeek, dayOfMonth, month, year; // retrieve data from DS3231 readDS3231time(&second, &minute, &hour, &dayOfWeek, &dayOfMonth, &month, &year); hour =hour+1; setDS3231time(second, minute, hour, dayOfWeek, dayOfMonth, month, year); //Set seconds to 30 on RTC stepoffRTChourfwd =1; } if( digitalRead(changeSetting) ==LOW ) { stepoffRTChourfwd =0; }}//##################################################################################// set RTC hour backward 1 hour per press ##################################################################################void setRTCbwd(){ if( digitalRead(changeSetting) ==HIGH &&stepoffRTChourbwd ==0 ) { byte second, minute, hour, dayOfWeek, dayOfMonth, month, year; // retrieve data from DS3231 readDS3231time(&second, &minute, &hour, &dayOfWeek, &dayOfMonth, &month, &year); hour =hour-1; setDS3231time(second, minute, hour, dayOfWeek, dayOfMonth, month, year); //Set seconds to 30 on RTC stepoffRTChourbwd =1; } if( digitalRead(changeSetting) ==LOW ) { stepoffRTChourbwd =0; }}//##################################################################################// set Minutes Motor forward 1 min per press ##################################################################################void setMinsfwd(){ //digitalWrite(sleep1, LOW); //stepper.enableOutputs();// step minutes 1 min per press if( digitalRead(changeSetting) ==HIGH &&stepoffMin ==0 ) { //Serial.println("Step Forward Man");// serial removed stepoffMin =1; stepminsFwd(); } if( digitalRead(changeSetting) ==LOW ) { stepoffMin =0; }//digitalWrite(sleep1, HIGH); //stepper.disableOutputs();}//##################################################################################// set Minutes Motor backward 1 min per press ##################################################################################void setMinsbwd(){ //digitalWrite(sleep1, LOW); // stepper.enableOutputs(); if( digitalRead(changeSetting) ==HIGH &&stepoffMinbwd ==0 ) { // Serial.println("Step Backward Man");// serial removed stepoffMinbwd =1; stepminsBwd(); } if( digitalRead(changeSetting) ==LOW ) { stepoffMinbwd =0; }//digitalWrite(sleep1, HIGH); // stepper.disableOutputs();}//##################################################################################// step minutes slow forward const press ##################################################################################void setMinsslowfwd(){ stepper.enableOutputs(); digitalWrite(sleep1, LOW); if( digitalRead(changeSetting) ==HIGH ) { // Serial.println("Step Baro Inch Forward Man");// serial removed stepper.setCurrentPosition(0); // Run the motor forward at 500 steps/second until the motor reaches 4096 steps (1 revolution):while (stepper.currentPosition() !=1) { //was 52 52x60 =3120 stepper.setSpeed(50); stepper.runSpeed(); } /* digitalWrite(motorPin1, LOW); digitalWrite(motorPin2, LOW); digitalWrite(motorPin3, LOW); digitalWrite(motorPin4, LOW);*/ } digitalWrite(sleep1, HIGH); stepper.disableOutputs();}//##################################################################################// step minutes slow backward const press ##################################################################################void setMinsslowbkd(){ stepper.enableOutputs(); digitalWrite(sleep1, LOW); if( digitalRead(changeSetting) ==HIGH ) { // Serial.println("Step Baro Inch Backward Man");// serial removed stepper.setCurrentPosition(0); // Run the motor forward at 500 steps/second until the motor reaches 4096 steps (1 revolution):while (stepper.currentPosition() !=-1) { //was 52 52x60 =3120 stepper.setSpeed(-50); stepper.runSpeed(); } /* digitalWrite(motorPin1, LOW); digitalWrite(motorPin2, LOW); digitalWrite(motorPin3, LOW); digitalWrite(motorPin4, LOW);*/ } digitalWrite(sleep1, HIGH); stepper.disableOutputs();}//##################################################################################// set Hour Motor forward 1 hour per press ##################################################################################void setHoursfwd(){ // stepper2.enableOutputs(); // digitalWrite(sleep2, LOW); // step hours 1 hour per press if( digitalRead(changeSetting) ==HIGH &&stepoffHour ==0 ) { // Serial.println("Step 6hr Forward Man");// serial removed stepoffHour =1; stephourmanFwd(); } // stepper2.disableOutputs(); // digitalWrite(sleep2, HIGH);if( digitalRead(changeSetting) ==LOW ) { stepoffHour =0; }...This file has been truncated, please download it to see its full contents.
BarometerA4988_3hour__21.inoArduino
File for 3 hour display and forecasting/* Example sketch to control a 28BYJ-48 stepper motor with ULN2003 driver board, AccelStepper and Arduino UNO:number of steps/revolutions. More info:https://www.makerguides.com v4 added presure extreme LEDsv5 add forcast LEDs and calcv6 sorted enable and sleep orderv7 remove adjust on and test replace it with Clearing and threatening LEDs PIN 12 and 13 v8 add dac driver-deletedv9 added LCDv10 added weather forecast usingLEDs v12 LEds test addedv13 add 1 dp point to 3 hour displayv14 void 1026 add slow set buttonsv18 voided v19last reading not included in number of stepsv20 change led test orderv20a serial.print removed indicated by // serial removedv21 as 20a identical to v20 that includes serial print*/#include//SFE_BMP180 pressure sensor#include #include // ######## You will need to create an SFE_BMP180 object, here called "pressure":SFE_BMP180 pressure;#define ALTITUDE 125.0 // Altitude of Kenley Surrey in meters//#########//**********************// set the LCD address to 0x27 for a 20 chars 4 line display// Set the pins on the I2C chip used for LCD connections:// addr, en,r w,rs,d4,d5,d6,d7,bl,blpolLiquidCrystal_I2C lcd(0x27, 2, 1, 0, 4, 5, 6, 7, 3, POSITIVE); // Set the LCD I2C address//#define DS3231_I2C_ADDRESS 0x68// Convert normal decimal numbers to binary coded decimalbyte decToBcd(byte val){ return( (val/10*16) + (val%10) );}// Convert binary coded decimal to normal decimal numbersbyte bcdToDec(byte val){ return( (val/16*10) + (val%16) );}// Include the AccelStepper library:#include // Define stepper motor connections and motor interface type. Motor interface type must be set to 1 when using a driver:#define dirPin 11#define stepPin 10#define motorInterfaceType 1// Create a new instance of the AccelStepper class:AccelStepper stepper =AccelStepper(motorInterfaceType, stepPin, dirPin);float seaPressure =0;float pressureNow =0;float pressurePrevious =0;float pressureDiff =0;int checkStop =0;//int pressureRndDiff =0;int pressureRndNow =0;int pressureRndPrevious =0;int adjustOn =12; // allows adjustment of barometer// int test =0; // test mode 0 off 1 is onchar status; double T,P,a;//int h =0;//int m =0;//int j =0;int stepcount =0;//int time =0;//int resetmins =1;//int secondNow =0;//int secondPrevious=0;//int minuteNow =0;//int minutePrevious=0;//int hourNow =0;//int hourPrevious=0;int initial =0;int initial1 =0;int initial3 =0;//int sync30 =3;//30sec sync on pin18//int syncLED =15;//int manSync =12;//int adjustOn =12;//int syncStop =0;//int sync30Stop =0;int stepoffHour =0;int stepoffHourbkw =0;int stepoffMin =0;int stepoffMinbwd =0;//int stepoffRTCminfwd =0;//int stepoffRTCminbwd =0;//int stepoffRTChourfwd =0;//int stepoffRTChourbwd =0;//int settingreadPin =A3; //Pin for sensing analogue value from pot//int settingVal =0; // Analogue value 0-1023int LCDstop =0; // stops settings on LCD display refreshing until they changeint hourPulse =3; //hour pulse from main Barometer Arduinoint adjustLock =0; // turns off adjust lockint hourcalc =0;float hourDiff =0.50; // used to check if 3hour previous motor should be stepped.float hourChange =0.00; // the amount of 3 hour to step float valueint hourStep =0; //the amount of 3 hour to stepint hourStepdigit1 =0; // gets the 1st digit from hourstepint hourStepdigit2 =0; // gets the 2nd digit from hourstepint stepTotal =0; // tptal amount of steps for 3 hour motorint hourChangeNeg =0;// if hour change is -ve this stores the value to chenge stepTotal laterfloat currentDisplay =0.50; //current 3hour change readingfloat hour0 =1036.00; // you can set last 3 hours pressure here or leave at 0 and thefloat hour1 =1036.00; // readings will catch up over the next 4 hoursfloat hour2 =1036.00;float hour3 =1036.00;float hour4 =1036.00;//check readings https://www.meteoplug.com/cgi-bin/meteochart.cgi?draw=a3aeaaa1acbdf9f1fcfed4fedbc2c094c0d6d6d1d2c5edcebbfee9ffeff1fbf9int sleep =9;int hourPulseOff =0;//int testinput =17;int testpulse =0;int hourPlus1min =0;int stepFwd1 =14;int manstepFwd1 =0;int maninchFwdBwd =A7;int stepBwd1 =15;int manstepBwd1 =0;int hour3LowLED =5;// Green low range LEDint hour3HighLED =4;//Red high range LEDint ledStormy =8;int ledRain =7;int ledChange =6;int ledFair =2;int ledDry =13;int ledClear =12;int ledThreat =17;int ledNoChange =16;//Testint n =0;int n1 =0;int n2 =0;void setup() { pinMode(ledStormy, OUTPUT); pinMode(ledRain, OUTPUT); pinMode(ledChange, OUTPUT); pinMode(ledFair, OUTPUT); pinMode(ledDry, OUTPUT); pinMode(ledClear, OUTPUT); pinMode(ledThreat, OUTPUT); pinMode(ledNoChange, OUTPUT); pinMode(stepFwd1, INPUT); pinMode(stepBwd1, INPUT); // pinMode(adjustOn, INPUT); pinMode(hourPulse, INPUT); pinMode(hour3LowLED, OUTPUT); pinMode(hour3HighLED, OUTPUT); pinMode(sleep, OUTPUT); // pinMode(settingreadPin, INPUT); // Set the maximum steps per second:stepper.setMaxSpeed(1000); lcd.begin(20,4); // initialize the lcd for 20 chars 4 lines, turn on backlight lcd.backlight(); // backlight on not needed as controlled by 7 MAX2719 lcd.setCursor(0,0); //Start at character 0 on line 0 lcd.print("Barometer A988 3 Hr"); //@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@ lcd.setCursor(0,1); //Start at character 0 on line 0 lcd.print(" Version 20"); //@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@ { // Wire.begin(); Serial.begin(9600); delay(2000);lcd.setCursor(0,2); //Start at character 0 on line 0 lcd.print("##### LED TEST #####"); //@@@@@@@@}//#############################################################Serial.println("REBOOT v08");//############################################################ // Initialize the sensor (it is important to get calibration values stored on the device). if (pressure.begin()) Serial.println("BMP180 init success"); else { // Oops, something went wrong, this is usually a connection problem, // see the comments at the top of this sketch for the proper connections. Serial.println("BMP180 init fail\n\n"); tandis que (1); // Pause forever. }// test =1; // test set to 0 off 1 on//LED Testdelay (2000);digitalWrite(ledThreat, HIGH);delay (500);digitalWrite(ledThreat, LOW);digitalWrite(ledNoChange, HIGH);delay (500);digitalWrite(ledNoChange, LOW);digitalWrite(ledClear, HIGH);delay (500);digitalWrite(ledClear, LOW);digitalWrite(ledStormy, HIGH);delay (500);digitalWrite(ledStormy, LOW);digitalWrite(ledRain, HIGH);delay (500);digitalWrite(ledRain, LOW);digitalWrite(ledChange, HIGH);delay (500);digitalWrite(ledChange, LOW);digitalWrite(ledFair, HIGH);delay (500);digitalWrite(ledFair, LOW);digitalWrite(ledDry, HIGH);delay (500);digitalWrite(ledDry, LOW);digitalWrite(hour3HighLED, HIGH);delay (500);digitalWrite(hour3HighLED, LOW);digitalWrite(hour3LowLED, HIGH);delay (500);digitalWrite(hour3LowLED, LOW); lcd.clear(); getPressure ();// gets all pressure readings showLCD(); // load display to LCD getForecast(); //get forcast and set LEDs for weather //disable motors on startupdigitalWrite(sleep, HIGH);stepper.disableOutputs(); }void loop() { hourPlus1min =(digitalRead(hourPulse));//checks for pulse at 1min past the hour from the barometer if (hourPlus1min ==HIGH &&hourPulseOff ==0 || initial1 ) { initial1 =0; hourcalc++; if (hourcalc> 4) { hourcalc =0; } //Serial.print("hourcalc ");// serial removed // Serial.println(hourcalc);// serial removed getPressure ();// gets all pressure readings getForecast(); //get forcast and set LEDs for weather showLCD(); // load display to LCD hourPulseOff =1; //turns off } else if (hourPlus1min ==LOW) { hourPulseOff =0; } adjustLock =0; //hold on adjustment// Step forward/back man~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ // step hours 1 hour per press manstepFwd1 =digitalRead(stepFwd1); if( manstepFwd1 ==HIGH &&stepoffHour ==0 ) { stepoffHour =1; stephourmanFwd(); } manstepFwd1 =digitalRead(stepFwd1);if( manstepFwd1 ==LOW ) { stepoffHour =0; } // step hours 1 hour per press manstepBwd1 =digitalRead(stepBwd1); if( manstepBwd1 ==HIGH &&stepoffHour ==0 ) { stepoffHour =1; stephourmanBwd(); } manstepBwd1 =digitalRead(stepBwd1); if( manstepBwd1 ==LOW) { stepoffHour =0; } //~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ //Inch 3hr forward/backwardsmaninchFwdBwd=analogRead(A7);if (maninchFwdBwd>800 ){// Serial.print(" maninchFwdBwd=");// serial removed // Serial.println(maninchFwdBwd);// serial removed maninchFwd(); } else if (maninchFwdBwd <200) { // Serial.print(" maninchFwdBwd=");// serial removed// Serial.println(maninchFwdBwd);// serial removed maninchBwd(); } //##############################################################################//step 3 hour motorif (hourChange> 0 &&hourChange <20) // 3 hour motor will not step if diff> 40 { stephourFwd(); // Serial.print("Step 3 hour Forward ");// serial removed // Serial.println(hourChange);// serial removed hourChange =0; } else if(hourChange <0 &&hourChange> -20) { stephourBwd(); // Serial.print("Step 3 Hour Backward ");// serial removed // Serial.println(hourChange);// serial removed hourChange =0; } //############################################################################## } //##################################################################################// set Hour Motor backward 1 hour per press ##################################################################################void setHoursbwd(){ // digitalWrite(sleep, LOW);// stepper.enableOutputs(); // step hours 1 hour per press if( digitalRead(adjustOn) ==HIGH &&stepoffHourbkw ==0 ) { // Serial.println("Step 3hr Backward Man"); stepoffHourbkw =1; stephourmanBwd(); }// stepper.disableOutputs();// digitalWrite(sleep, HIGH);if( digitalRead(adjustOn) ==LOW ) { stepoffHourbkw =0; }// End step hours 1 hour per press}//##################################################################################// step hours slow forward const press ##################################################################################void maninchFwd(){ stepper.enableOutputs(); digitalWrite(sleep, LOW); if( digitalRead(adjustOn) ==HIGH ) { // Serial.println("Step 3hr Inch Forward Man");// serial removed stepper.setCurrentPosition(0); // Run the motor forward at 500 steps/second until the motor reaches 8 steps (1 revolution):while (stepper.currentPosition() !=1) { //was 52 52x60 =3120 stepper.setSpeed(10); stepper.runSpeed(); } } digitalWrite(sleep, HIGH);stepper.disableOutputs();}//##################################################################################// step hours slow backward const press ##################################################################################void maninchBwd(){ stepper.enableOutputs(); digitalWrite(sleep, LOW); if( digitalRead(adjustOn) ==HIGH ) { // Serial.println("Step 3hr Inch backward Man");// serial removed stepper.setCurrentPosition(0); // Run the motor forward at 500 steps/second until the motor reaches 8 steps (1 revolution):while (stepper.currentPosition() !=-1) { //was 52 52x60 =3120 stepper.setSpeed(-10); stepper.runSpeed(); } } digitalWrite(sleep, HIGH);stepper.disableOutputs();}//################################################################################## //Hour Motor #####################################################################################################void stephourFwd() // steps hour hand forward 1 hour{ stepper.enableOutputs(); // Serial.println("Step 3 hrs forward auto");// serial removed digitalWrite(sleep, LOW); stepper.setCurrentPosition(0); // Run the motor forward at 500 steps/second until the motor reaches 4096 steps (1 revolution):while (stepper.currentPosition() !=hourChange*160) { //hourDiff gives the nuber of steps to take stepper.setSpeed(400); stepper.runSpeed(); } digitalWrite(sleep, HIGH); stepper.disableOutputs(); }//###############################################################################################################//Hour Motor #####################################################################################################void stephourBwd() // steps hour hand backward 1 hour{ stepper.enableOutputs(); //Serial.println("Step 3hrs backward auto");// serial removed digitalWrite(sleep, LOW); stepper.setCurrentPosition(0);while ( stepper.currentPosition() !=hourChange*160) { stepper.setSpeed(-400); stepper.runSpeed(); }digitalWrite(sleep, HIGH); stepper.disableOutputs(); }//###############################################################################################################//Hour Motor Man Step forward#####################################################################################################void stephourmanFwd() // steps hour hand forward 1 hour{ stepper.enableOutputs(); digitalWrite(sleep, LOW); //Serial.println("Step 3hr forward man");// serial removed stepper.setCurrentPosition(0); // Run the motor forward at 500 steps/second until the motor reaches 4096 steps (1 revolution):while ( stepper.currentPosition() !=160) { stepper.setSpeed(400); stepper.runSpeed(); } digitalWrite(sleep, HIGH); stepper.disableOutputs(); }//###############################################################################################################//Hour Motor Man Step back ward #####################################################################################################void stephourmanBwd() // steps hour hand backward 1 hour{ stepper.enableOutputs(); digitalWrite(sleep, LOW); // Serial.println("Step 3hr backward man");// serial removed stepper.setCurrentPosition(0);while ( stepper.currentPosition() !=-160) { stepper.setSpeed(-400); stepper.runSpeed(); }digitalWrite(sleep, HIGH); stepper.disableOutputs(); }//###############################################################################################################void getPressure ()//get all pressure readings checked every 10 mins eg 0 10 20 etc{ if (checkStop ==0){ // If you want sea-level-compensated pressure, as used in weather reports, // you will need to know the altitude at which your measurements are taken. // We're using a constant called ALTITUDE in this sketch:// Serial.println(); // Serial.print("provided altitude:"); // Serial.print(ALTITUDE,0);// Serial.print(" meters, "); // Serial.print(ALTITUDE*3.28084,0);// Serial.println(" feet"); // If you want to measure altitude, and not pressure, you will instead need // to provide a known baseline pressure. This is shown at the end of the sketch. // You must first get a temperature measurement to perform a pressure reading. // Start a temperature measurement:// If request is successful, the number of ms to wait is returned. // If request is unsuccessful, 0 is returned. status =pressure.startTemperature(); if (status !=0) { // Wait for the measurement to complete:delay(status); // Retrieve the completed temperature measurement:// Note that the measurement is stored in the variable T. // Function returns 1 if successful, 0 if failure. status =pressure.getTemperature(T); if (status !=0) { // Print out the measurement:// Serial.print("temperature:"); // Serial.print(T,2); // Serial.print(" deg C, "); // Serial.print((9.0/5.0)*T+32.0,2); // Serial.println(" deg F"); // Start a pressure measurement:// The parameter is the oversampling setting, from 0 to 3 (highest res, longest wait). // If request is successful, the number of ms to wait is returned. // If request is unsuccessful, 0 is returned. status =pressure.startPressure(3); if (status !=0) { // Wait for the measurement to complete:delay(status); // Retrieve the completed pressure measurement:// Note that the measurement is stored in the variable P. // Note also that the function requires the previous temperature measurement (T). // (If temperature is stable, you can do one temperature measurement for a number of pressure measurements.) // Function returns 1 if successful, 0 if failure. status =pressure.getPressure(P,T); if (status !=0) { // Print out the measurement:// Serial.print("absolute pressure:"); // Serial.print(P,2); // Serial.print(" mb, "); // Serial.print(P*0.0295333727,2); // Serial.println(" inHg"); // The pressure sensor returns abolute pressure, which varies with altitude. // To remove the effects of altitude, use the sealevel function and your current altitude. // This number is commonly used in weather reports. // Parameters:P =absolute pressure in mb, ALTITUDE =current altitude in m. // Result:p0 =sea-level compensated pressure in mb seaPressure =pressure.sealevel(P,ALTITUDE); // we're at 160 meters (Kenley, Surrey UK) // serial removed /* Serial.print("relative (sea-level) pressure:"); Serial.print(seaPressure,2); Serial.print(" mb, "); Serial.print(seaPressure*0.0295333727,2); Serial.println(" inHg"); */ // On the other hand, if you want to determine your altitude from the pressure reading, // use the altitude function along with a baseline pressure (sea-level or other). // Parameters:P =absolute pressure in mb, p0 =baseline pressure in mb. // Result:a =altitude in m. a =pressure.altitude(P,seaPressure); // Serial.print("computed altitude:"); // Serial.print(a,0); // Serial.print(" meters, "); // Serial.print(a*3.28084,0); // Serial.println(" feet"); } else Serial.println("error retrieving pressure measurement\n"); } else Serial.println("error starting pressure measurement\n"); } else Serial.println("error retrieving temperature measurement\n"); } else Serial.println("error starting temperature measurement\n");}//Serial.print("hourscalc "); // Serial.println(hourcalc);if (hourcalc ==0){ hour0 =seaPressure;//was rnd sea pressure currentDisplay =hourDiff; // the last display reading becomes the old reading called currentDisplay hourDiff =hour0 - hour3; // this is the air pressure difference from now to the reading 3 hours ago and wil be displayed onthe 3 hour dial calcCurrentDisp (); // calculates 3 hour Air pressure display }else if (hourcalc ==1){ hour1 =seaPressure; currentDisplay =hourDiff; hourDiff =hour1 - hour4; calcCurrentDisp (); }else if (hourcalc ==2 ){ hour2 =seaPressure; currentDisplay =hourDiff;hourDiff =hour2 - hour0; calcCurrentDisp (); }else if (hourcalc ==3 ){ hour3 =seaPressure; currentDisplay =hourDiff; hourDiff =hour3 - hour1; calcCurrentDisp (); }else if (hourcalc ==4 ){ hour4 =seaPressure; currentDisplay =hourDiff; hourDiff =hour4 - hour2; calcCurrentDisp (); }//show 3 hour pressure scale hi/low LEDsif(hourDiff> 9 || hourDiff <-9) // if 3 hour pressure is outside of extended range both hi and low range leds light{digitalWrite( hour3HighLED, HIGH); digitalWrite( hour3LowLED, HIGH);}else if(hourDiff>=4.80) { digitalWrite( hour3HighLED, HIGH); digitalWrite( hour3LowLED, LOW); } else if (hourDiff <=-4.80) { digitalWrite( hour3LowLED, HIGH); digitalWrite( hour3HighLED, LOW); } else if ( hourDiff <4.80 &&hourDiff>-4.80 ) { digitalWrite( hour3LowLED, LOW); digitalWrite( hour3HighLED, LOW); } // Serial.print("currentDisplay (old) ");// serial removed // Serial.println(currentDisplay);// serial removed// Serial.print("3 hour display to show ");// serial removed// Serial.println(hourDiff);// serial removed//Serial.print("RND seaPressure ");//Serial.println(round(seaPressure));//get pressure change and show change over 1 hour on LCD bottom row pressureNow =seaPressure; if ( pressureNow !=pressurePrevious || initial ) { initial =0; pressureDiff =pressureNow - pressurePrevious; //Print pressure and diff on LCD lcd.setCursor(0,3); if (pressurePrevious ==0.00) { pressurePrevious =pressureNow;// shows previous pressure at startup } if(pressurePrevious<1000) { lcd.print(0); } lcd.print(pressurePrevious);// shows previous pressure until 1hPa change lcd.print("hPa "); // pressurePrevious =pressureNow; lcd.setCursor(12,3); lcd.print(" ");//blank section lcd.setCursor(12,3); lcd.print(pressureDiff); // show rounded pressure reading on display updayes every hour lcd.setCursor(0,2); lcd.print(" "); // show rounded pressure on lcd lcd.setCursor(0,2); if(pressureNow<1000) { lcd.print(0); } lcd.print(round(pressureNow)); } pressureRndPrevious =pressureRndNow; pressurePrevious =pressureNow;//resets pressure change//################################################################################# } //####################################################################// show forecast on LEDs/* Predicting the Weather With the BarometerMore specifically, a barometer with readings in hPa can be interpreted in this manner:If the reading is over 1022 hPa Rising or steady pressure means continued fair weather.Slowly falling pressure means fair weather.Rapidly falling pressure means cloudy and warmer conditions.If it falls between 1009–1022 hPa Rising or steady pressure means present conditions will continue.Slowly falling pressure means little change in the weather.Rapidly falling pressure means that rain is likely, or snow if it is cold enough.If the reading is under (1009 hPaRising or steady pressure indicates clearing and cooler weather.Slowly falling pressure indicates rainRapidly falling pressure indicates a storm is coming.Rising or Fallin g slowlyPressure change of 0.1 to 1 mb in the preceding three hoursRising or FallingPressure change of 1 to 3 mb in the preceding three hoursRising or Falling quicklyPressure change of 3 to 6 mb in the preceding three hoursRising or Falling very rapidlyPressure change of more than 6.0 mb in the preceding three hours */void getForecast(){ //reading is under (1009 hPa //Rising or steady pressure indicates clearing and cooler weather if(seaPressure <1009.00 &&hourDiff>=0 ) { ClearforecastLED();// clear all forecast LEDs before changing digitalWrite( ledChange, HIGH); digitalWrite( ledClear, HIGH); lcd.setCursor(8,2); lcd.print(" "); lcd.setCursor(8,2); lcd.print("Chg Clearing"); } //reading is under (1009 hPa //Slowly falling pressure indicates rain else if(seaPressure <1009.00 &&hourDiff <0 &&hourDiff>=-1.5 ) { ClearforecastLED(); digitalWrite( ledRain, HIGH); digitalWrite( ledThreat, HIGH); lcd.setCursor(8,2); lcd.print(" "); lcd.setCursor(8,2); lcd.print("Rain Threat"); } //reading is under (1009 hPa //Rapidly falling pressure indicates a storm is coming. else if(seaPressure <1009.00 &&hourDiff <-1.5 ) { ClearforecastLED(); digitalWrite( ledStormy, HIGH); digitalWrite( ledThreat, HIGH); lcd.setCursor(8,2); lcd.print(" "); lcd.setCursor(8,2); lcd.print("Storm Threat"); } //1009–1022 hPa //Rising or steady pressure means present conditions will continue. //Slowly falling pressure means little change in the weather. else if(seaPressure>=1009.00 &&seaPressure <=1022.00 &&hourDiff>=-1.5 &&hourDiff <=1.5 ) { ClearforecastLED(); digitalWrite( ledNoChange, HIGH); digitalWrite( ledFair, HIGH); lcd.setCursor(8,2); lcd.print(" "); lcd.setCursor(8 ,2); lcd.print("Fair No Chge"); }//1009–1022 hPa //Rising rapidly //Clearing else if(seaPressure>=1009.00 &&seaPressure <=1022.00 &&hourDiff>1.5 )...This file has been truncated, please download it to see its full contents.
Schémas
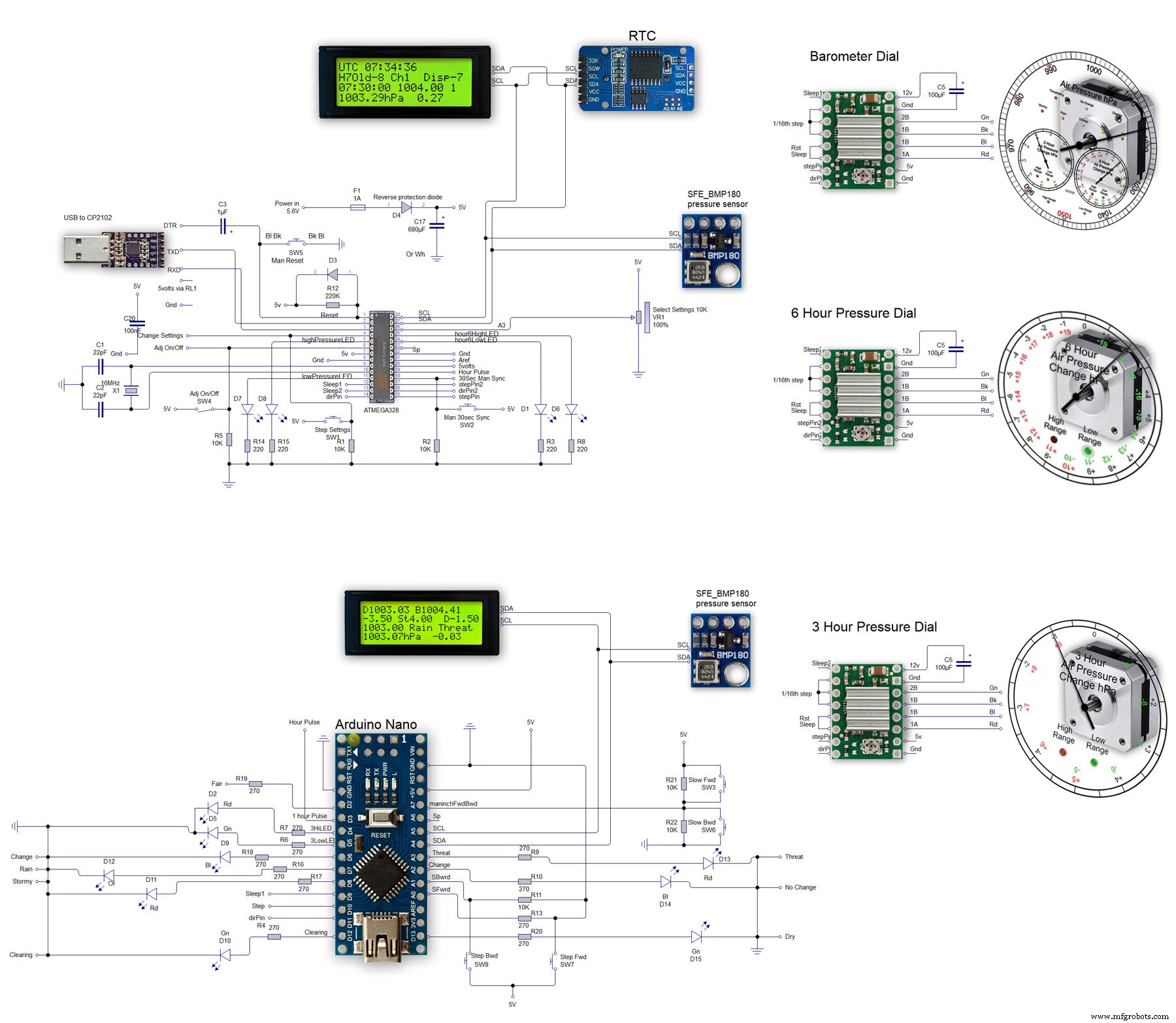
Processus de fabrication