


Robot à 4 roues fabriqué avec Arduino contrôlé à l'aide de Dabble
Composants et fournitures
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 4 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
Applications et services en ligne
 |
| |||
|
À propos de ce projet
Un autre projet, une autre idée cadeau originale ! Nous vous présentons le robot à 4 roues contrôlé par Dabble - un robot simple et amusant à construire et facile à contrôler qui peut être contrôlé via Bluetooth à l'aide de Dabble, une application mobile développée localement. Tout ce dont vous avez besoin pour fabriquer votre robot est une carte Arduino Uno, un châssis, des roues, des arbres de moteur et d'autres accessoires et outils. Pour le contrôler, vous devez installer Dabble depuis Google Play et le coupler avec Bluetooth; et votre robot est prêt à partir !
Quoi de mieux pour terminer l'année avec le même esprit DIY qu'au début, n'est-ce pas ? Alors qu'est-ce que tu attends!
Alors, commençons !
Étape 1 : choses dont vous aurez besoin
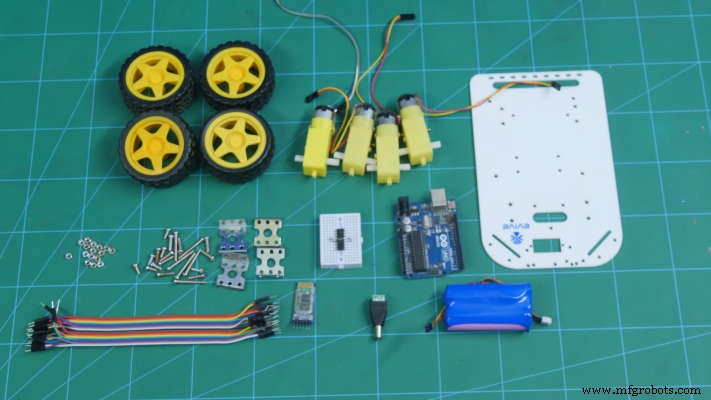
- Carte Arduino Uno
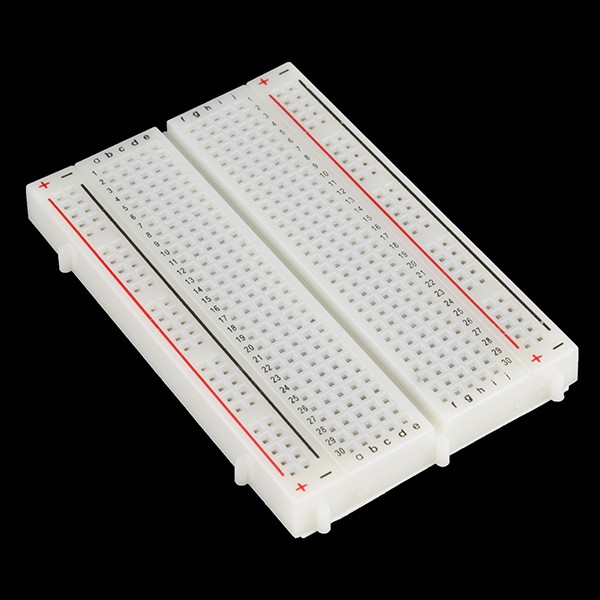
- Planche à pain
- Châssis
- Supports de moteur
- Moteurs à courant continu
- Roue
- Conducteur de moteur
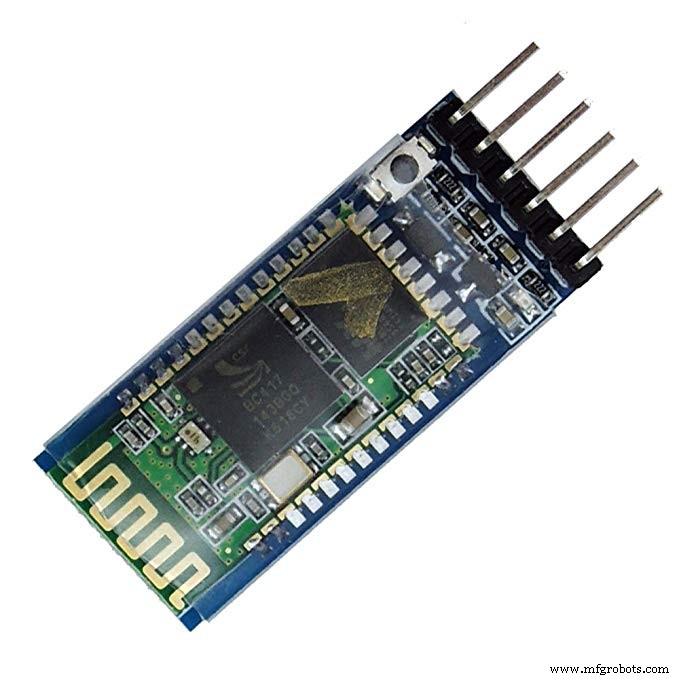
- Module Bluetooth HC05
- Bloc de connexion CC
- Batterie
- Câbles de démarrage
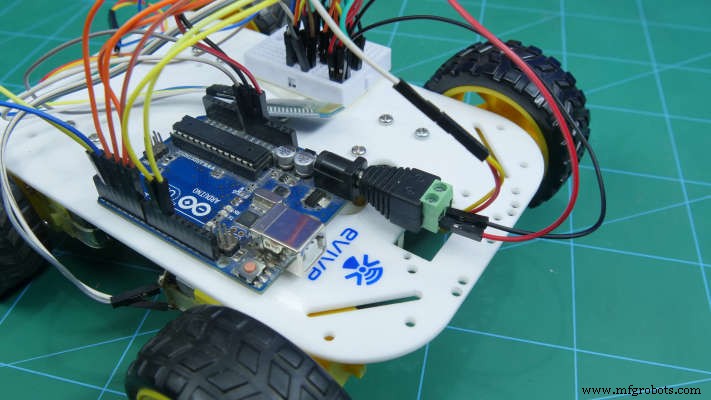
Étape 2 :fabrication du corps
Tout d'abord, nous allons commencer à fabriquer le corps du robot à 4 roues.
Prenez le châssis et retournez-le.

Sur ce châssis, montez 4 supports de moteur à l'aide de boulons et d'écrous M3.
Fixez les moteurs à courant continu et fixez-les sur les supports de moteur à l'aide d'écrous et de boulons M2.
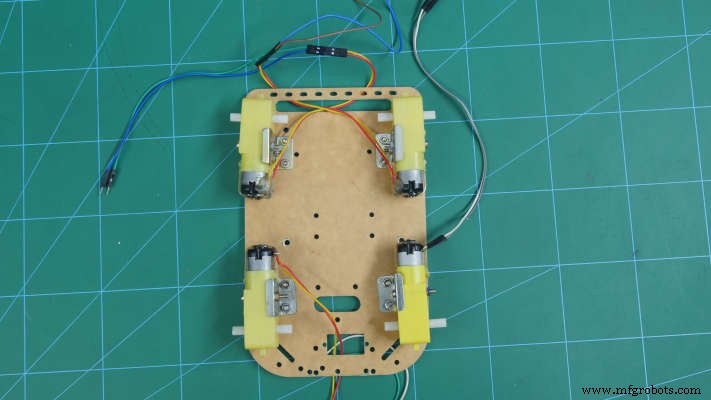
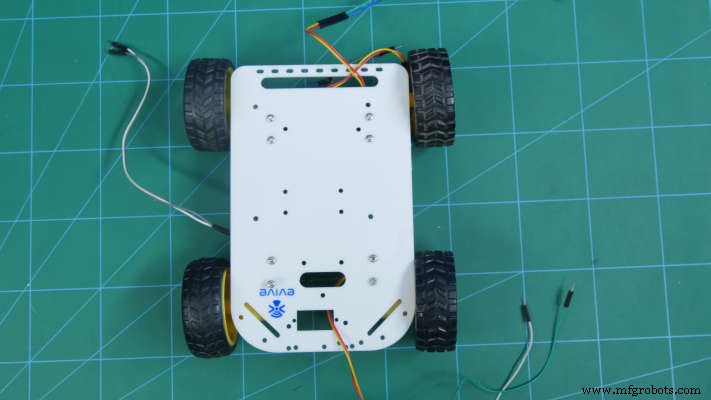
Fixez les roues sur chaque arbre du moteur à courant continu.

Retournez l'assemblage, ainsi votre corps est créé.
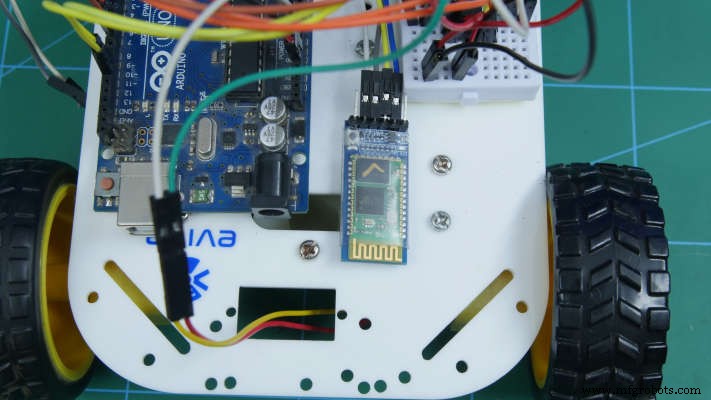
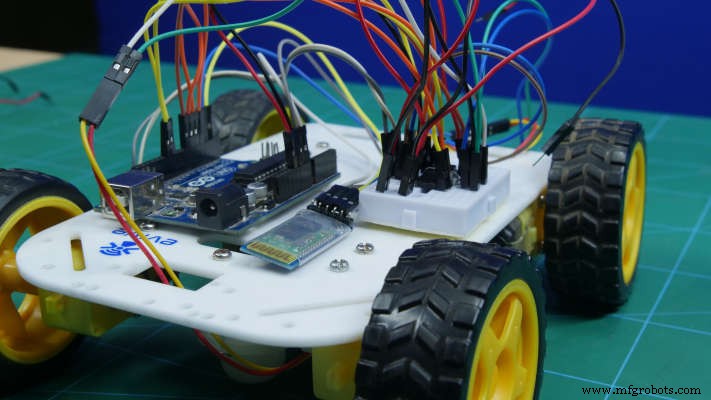
Étape 3 : ajout du cerveau
Le microcontrôleur que nous allons utiliser est Arduino Uno.

Nous allons faire toutes les connexions dessus, mais nous allons également utiliser une maquette pour faire les connexions.
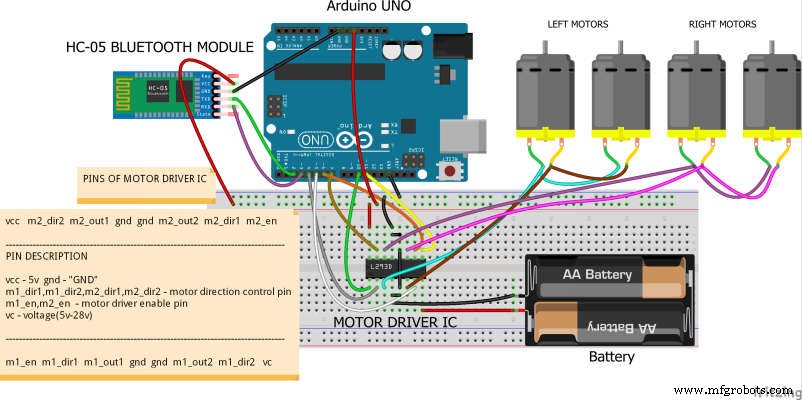
Étape 4 : établir des connexions et utiliser le pilote de moteur
Effectuez la connexion comme indiqué dans la figure ci-dessous.
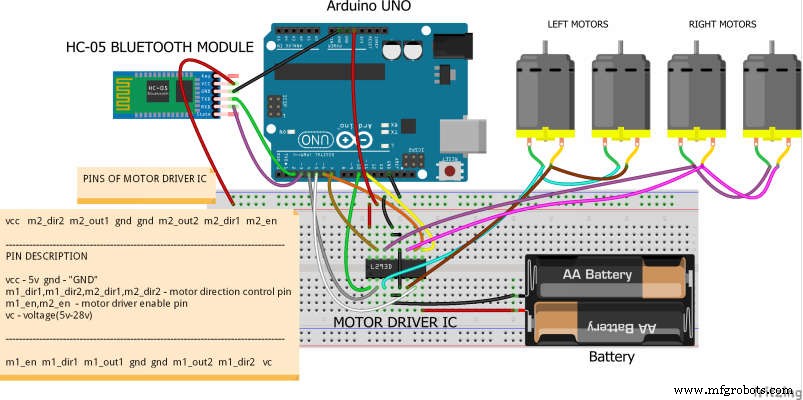
Nous allons utiliser les pilotes de moteur car Arduino Uno ne fournit pas suffisamment de puissance pour faire fonctionner 4 moteurs. Ainsi, nous allons ajouter le pilote du moteur, nous pourrons donner au robot l'énergie nécessaire.
Les deux moteurs de gauche sont connectés en parallèle. De même, les deux moteurs de droite sont trop connectés en parallèle. Les connexions se font comme suit :
- Activer les broches - broches numériques 10 et 11
- VCC - Arduino 5V
- m1_dir1, m1_dir2, m2_dir1, m2_dir2 – Broche numérique 4, 5, 6 et 7
- VC - Batterie externe
- GND - GND d'Arduino et de la batterieAssurez-vous de connecter tous les fils GND ensemble.
Étape 5 : Connecter le smartphone
Nous devons ajouter un module qui fera la connexion entre votre robot et Dabble App sur Smartphone.
Nous prenons le module Bluetooth HC05. Connectez-le comme indiqué sur la figure de connexion.
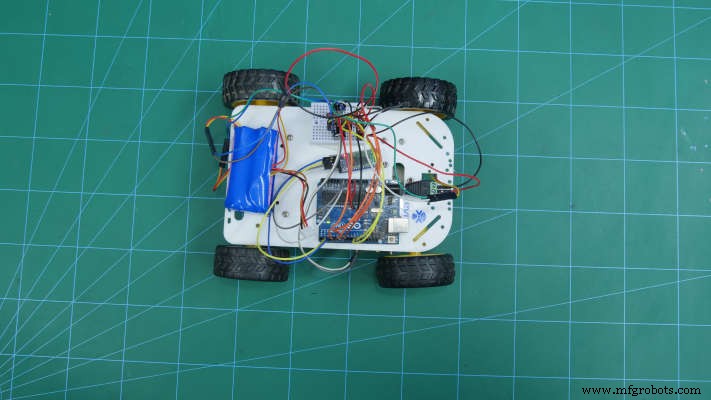
Étape 6 :Ajout de la batterie
Nous devrons ajouter une source d'alimentation supplémentaire à notre robot. De plus, pour connecter Arduino Uno à la batterie, nous allons utiliser un bornier CC ou une prise CC.
Étape 7 : Code Arduino
Téléchargez le code suivant :
robot.ino
Étape 8 :Travailler
Nous pouvons facilement connecter notre robot à notre Smartphone en utilisant Dabble.
Avant de travailler avec l'un des modules, vous devez connecter le Bluetooth sur lequel vous travaillez.
Il existe de nombreux modules disponibles dans l'application pour d'autres fonctionnalités.
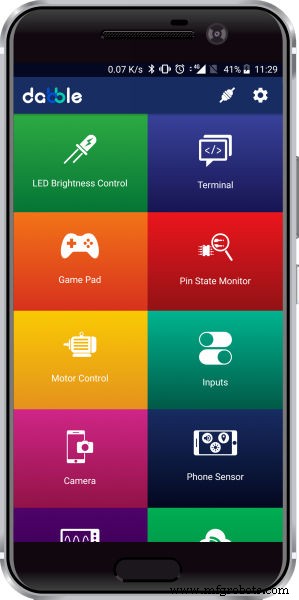
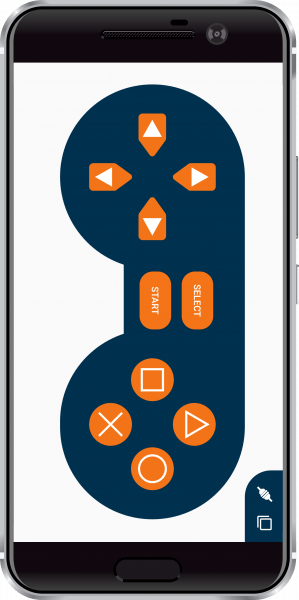
Aujourd'hui, nous allons travailler avec le module Gamepad.
Et nous utiliserons l'ensemble de boutons de gauche :
- En haut – Avancer
- Bas – Reculer
- Gauche - Tourner à gauche
- Droite – Tourner à droite
Étape 9 :Conclusion
Avec cela, votre robot à 4 roues contrôlé par DIYDabble est prêt à l'action !
Psst ! Pour info, Dabble peut faire bien plus que simplement contrôler des robots sans fil. Vous pouvez en savoir plus ici !
Code
- robot.ino
- Bibliothèque eviv
robot.inoArduino
/* * * ce projet démontre le contrôle du robot arduino à 4 roues à l'aide de l'application Dabble * nous utiliserons le module de manette de jeu en mode numérique * pour plus d'informations sur la manette de jeu, rendez-vous sur https://thestempedia.com/docs/dabble/game- pad-module/ * * dans ce projet, nous utiliserons le module bluetooth HC-05 * pour arduino "UNO", utilisez un débit de module bluetooth inférieur à 38400 * * connexion du module bluetooth avec arduino * * module bluetooth HC-05 ----> arduino "UNO" * * Tx ----> 2 * Rx ----> 3 * * Écrit par Punit chotaliya, STEMpedia * le 16 jan 2019 * *///Pour inclure le module GamePad dans le programme Arduino, vous devez //inclure l'en-tête suivant :#define CUSTOM_SETTINGS#define INCLUDE_GAMEPAD_MODULE//include Dabble app library #include#define motor1_en 10 // motor 1 enable pin #define motor2_en 11 // motor 2 enable pin # define motor1_dir1 4 // moteur 1 input1 (InputA) #define motor1_dir2 5 // moteur 1 input2 (InputA)#define motor2_dir1 6 // moteur 2 input1 (InputB)#define mo tor2_dir2 7 // motor 2 input2 (InputB)void setup() { // mettez votre code de configuration ici, à exécuter une fois :Serial.begin(9600); // démarrer la communication série en utilisant un débit de 9600 bauds Dabble.begin(38400); // Entrez le débit en bauds de votre module bluetooth // REMARQUE :pour arduino "UNO", utilisez le débit en bauds du module bluetooth inférieur à 38400 pour (unsigned int i=4;i<8;i++) { pinMode(i,OUTPUT); // déclaration des broches d'entrée de motor1 et motor2 comme broche de sortie } pinMode(motor1_en,OUTPUT); // déclarer activer les broches du moteur en tant que sortie pinMode(motor2_en,OUTPUT); }void loop() { // mettez votre code principal ici, pour l'exécuter à plusieurs reprises :Dabble.processInput(); // Pour actualiser les données que l'arduino UNO a obtenues de l'application mobile, vous devez utiliser la ligne de code suivante if (GamePad.isUpPressed()) // si UP est enfoncé dans la manette de jeu, déplacez le robot vers l'avant { Serial.print ("EN HAUT"); effronté(); } else if (GamePad.isDownPressed()) // si DOWN est enfoncé dans la manette de jeu, déplacez le robot vers l'arrière { Serial.print("DOWN"); arrière (); } else if (GamePad.isLeftPressed()) // si la touche GAUCHE est enfoncée dans la manette, déplacez le robot GAUCHE { Serial.print("Gauche"); à gauche(); } else if (GamePad.isRightPressed()) // si RIGHT est enfoncé dans la manette de jeu, alors déplacez le robot RIGHT { Serial.print("Right"); à droite(); } else // arrête le robot { Serial.println("strop"); Arrêter(); } } void forward() // fonction pour le mouvement vers l'avant du robot { analogWrite(motor1_en,255); analogWrite(motor2_en,255); digitalWrite(motor1_dir1,HIGH); digitalWrite(motor1_dir2,LOW); digitalWrite(motor2_dir1,HIGH); digitalWrite(motor2_dir2,LOW); } void back() // fonction pour le mouvement arrière du robot { analogWrite(motor1_en,255); analogWrite(motor2_en,255); digitalWrite(motor1_dir1,LOW); digitalWrite(motor1_dir2,HIGH); digitalWrite(motor2_dir1,LOW); digitalWrite(motor2_dir2,HIGH); } void left() // fonction pour le mouvement gauche du robot { analogWrite(motor1_en,255); analogWrite(motor2_en,255); digitalWrite(motor1_dir1,LOW); digitalWrite(motor1_dir2,HIGH); digitalWrite(motor2_dir1,HIGH); digitalWrite(motor2_dir2,LOW); } void right() // fonction pour le mouvement droit du robot { analogWrite(motor1_en,255); analogWrite(motor2_en,255); digitalWrite(motor1_dir1,HIGH); digitalWrite(motor1_dir2,LOW); digitalWrite(motor2_dir1,LOW); digitalWrite(motor2_dir2,HIGH); } void Stop() // // fonction sans mouvement { analogWrite(motor1_en,0); analogWrite(motor2_en,0) ; digitalWrite(motor1_dir1,LOW); digitalWrite(motor1_dir2,LOW); digitalWrite(motor2_dir1,LOW); digitalWrite(motor2_dir2,LOW); }
bibliothèque eviveC/C++
Aucun aperçu (téléchargement uniquement).
Schémas
Processus de fabrication
- Robot Raspberry Pi contrôlé par Bluetooth
- Créez votre robot de streaming vidéo contrôlé par Internet avec Arduino et Raspberry Pi
- Robot contrôlé par Wi-Fi utilisant Raspberry Pi
- Variation des lumières avec PWM à l'aide du bouton-poussoir
- Jouet contrôlé par Android utilisant un bouclier de moteur Raspberry
- Obstacles pour éviter le robot avec servomoteur
- Robot suiveur de ligne
- Bras robotique contrôlé par Nunchuk (avec Arduino)
- Robot à commande vocale