


Un robot de résolution de Sudoku
Composants et fournitures
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Outils et machines nécessaires
 |
|
Applications et services en ligne
 |
| |||
 |
| |||
|
À propos de ce projet
Un robot qui résout et remplit seul une grille de Sudoku' !
Les sudoku sont des puzzles numériques que les ordinateurs peuvent résoudre automatiquement car ils obéissent à des règles mathématiques simples.


L'objectif principal de ce projet était de construire un robot rudimentaire et autonome, comme une base de table traçante sur l'idée d'une imprimante 3D, qui sera capable de :
- analyser la grille de sudoku à remplir
- résoudre le problème du Sudoku
- remplir la grille
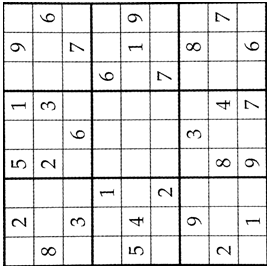
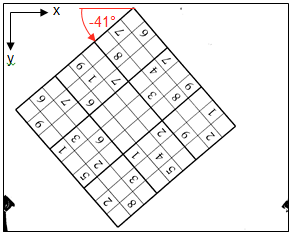
Cela signifie que le robot doit être capable de traiter la grille à résoudre afin de détecter les cases déjà remplies, leurs valeurs, puis procéder au remplissage comme le montre la grille remplie ci-dessous.
Comment ça fonctionne?
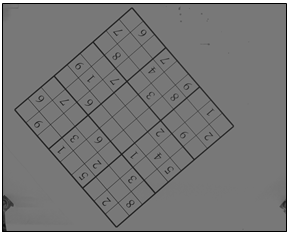
Le hardware du robot consiste à utiliser un Raspberry Pi 3 avec une caméra. Une photo de la grille est prise au début du processus.
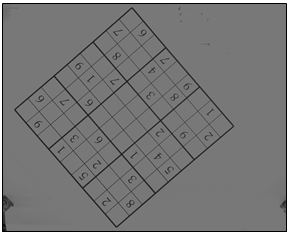
La grille est ensuite prétraitée à l'aide de méthodes de traitement d'image pour supprimer les artefacts. Il s'agit alors de redresser pour obtenir une image focalisée uniquement sur la grille.
Une fois la grille Sudoku obtenue, nous segmentons la grille pour extraire chaque case et procédons à la reconnaissance d'images à l'aide d'un réseau de neurones. À la fin de ce processus, nous avons une représentation numérique de notre grille qui peut ensuite être résolue.
Une fois résolu, le raspberry pi est à nouveau utilisé pour contrôler les moteurs du robot afin de remplir la grille.
Pour résumer,

- 1 - redresser la grille
- 2 - estimer les contours de la grille
- 3 - rehausser le contour (en multipliant 1 par 2)
- 4 - segmenter la grille pour extraire les cases
- 5 - procéder à la reconnaissance d'image
Le résultat
Compétences requises
- vision par ordinateur
- Traitement des images
- Compétences en programmation
- Électronique
- Mécanique
Outils et API utiles
- Python
- tensorflow pour réseau de neurones
- opencv pour le traitement d'images
Références
- https://en.wikipedia.org/wiki/Sudoku
- https://github.com/Sanahm/TensorFlow-Tutorials
Pour plus d'informations sur le projet n'hésitez pas à me contacter sur Github.
Code
Github
https://github.com/Sanahm/Sudoku-robothttps://github.com/Sanahm/Sudoku-robotProcessus de fabrication
- Télécommande universelle Raspberry Pi
- Une tranche de framboise Pi
- Cycle Chaser
- Détecteur de voleur Raspberry Pi
- Capteur de température Raspberry Pi
- DOMOMATISATION RASPBERRY PI
- Robot utilisant Raspberry Pi &Bridge Shield
- Robot évitant les murs basé sur Raspberry Pi – FabLab NerveCentre
- Création du kit robot MonkMakes Raspberry Pi