


enregistreur de données de ballon météo alimenté par Arduino
Composants et fournitures
 |
| × | 2 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 2 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 2 | |||
 |
| × | 3 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 |
Outils et machines nécessaires
 |
| |||
| |
|
Applications et services en ligne
| |
|
À propos de ce projet
Salut tout le monde!! Vous vous demandez probablement, attendez, vous pouvez envoyer un Arduino dans l'espace ? Presque. À l'aide d'un ballon météo, vous pouvez envoyer un Arduino, un appareil photo, du pain à l'ail ou tout ce que vous voulez dans un tiers de l'espace ! Même si c'est un tiers du chemin vers l'espace, près de 99% de l'atmosphère n'est pas présente, nous l'appelons donc "le bord de l'espace". Ce guide est très long, mais à moins que vous ne soyez en train de vérifier ce projet, assurez-vous de tout lire jusqu'au chemin 1. Quoi qu'il en soit, voyons comment vous pouvez le faire.
Il y aura trois chemins à suivre en fonction de ce que vous voulez et de votre niveau de compétence. Les trois voies nécessiteront des compétences en soudure en raison des vents incroyables dans la stratosphère. De toute façon, chaque chemin n'est pas meilleur que l'autre, c'est juste en fonction de ce qui vous intéresse. Passons-en rapidement en revue.
Chemin 1 :Création d'un enregistreur de données simple à l'aide d'une carte proto, de divers capteurs, avec peu de compétences en soudure.
Chemin 2 :Utilisation d'un blindage PCB préconçu (carte de circuit imprimé) pour obtenir une carte d'apparence propre et impressionnante, conçue et testée par nos soins.
Chemin 3 :Créez votre propre PCB dans un programme. Ce guide n'entrera pas dans le détail de la conception et de la fabrication de votre propre PCB, mais il passera en revue quelques lignes directrices auxquelles vous pourrez réfléchir. Je m'assurerai de créer un lien vers un guide génial pour vous permettre d'apprendre.
Nous reviendrons un peu plus sur chaque chemin, mais voici quelques conseils pour vous aider à choisir :
Le chemin 1 sera le plus simple et permettra une certaine flexibilité. Vous pouvez choisir les capteurs, la carte et les fonctionnalités de votre carte. Vous aurez besoin de compétences en soudure pour vous assurer que tout reste en place pendant le vol.
Le chemin 2 sera le plus restrictif, ce qui signifie que vous devrez utiliser un ensemble spécifié de capteurs, une carte Arduino spécifique, mais vous aurez un PCB très propre, vous n'aurez pas à vous soucier de la soudure ou du codage, et c'est un bon commencer à en apprendre davantage sur les PCB. Nous vous fournirons le fichier Gerber, les paramètres d'exportation et le code que vous pourrez consulter. Les PCB ne sont pas très chers, et cela peut dépendre d'où vous les obtenez. Nous avons obtenu 5 de ces PCB pour 2 $, mais ce prix peut différer selon l'endroit où vous l'achetez.
Le chemin 3 sera le plus difficile et nécessitera beaucoup de compétences. Vous devrez savoir (ou apprendre) comment fabriquer votre propre PCB ou shield Arduino PCB, savoir coder le tout et souder la carte. Si vous savez comment faire toutes ces choses, vous pouvez probablement réaliser ce projet vous-même, mais il existe des restrictions et des détails très importants pour lesquels ce guide peut vous aider.
D'accord!! Impressionnant! Vous devriez avoir choisi le chemin que vous voulez suivre maintenant ! Mais avant de nous lancer directement, il y a des règles très importantes que vous devez garder à l'esprit. Assurez-vous de lire ces règles car l'envoi de choses dans un ballon météo peut être limité en fonction de l'endroit où vous vivez. Ce guide n'expliquera pas comment choisir le bon ballon, construire la baie de charge utile et comment remplir le ballon, mais il existe BEAUCOUP de guides sur la façon de le faire, je vais donc les lier pour vous. Je vais passer en revue les restrictions de votre enregistreur de données Arduino et laisser un lien pour d'autres restrictions de la FAA (si vous habitez aux États-Unis). Voici les choses que vous devez garder à l'esprit :
1. Votre baie de charge utile ne peut recevoir aucun signal de téléphone portable. Si, pour une raison quelconque, vous avez un téléphone portable à bord, il doit être en mode avion.
2. Si vous utilisez le GPS pour trouver votre ballon, vous devez obtenir une licence radio HAM (qui nécessite des tests et des frais).
3. Si le rapport poids/taille de votre charge utile est supérieur à 3,0 onces/pouce carré, le poids total de la charge utile doit être inférieur à 4 livres.
4. Toute charge utile/ensemble doit être inférieur à 6 livres.
5. Et si vous avez deux charges utiles, le poids total de la charge utile doit être inférieur à 12 livres.
Ceci est un lien vers les directives complètes de la FAA pour les résidents américains.
Chemin 1 - Proto Board !
Avant de commencer à concevoir, vous devez garder à l'esprit quelques considérations. Tout d'abord, ce que vous voulez là-bas. Dans le schéma fourni, vous aurez un simple capteur de température et d'humidité, un capteur barométrique, un IMU et un module de carte SD. Pour la plupart des projets, cela devrait suffire, mais si vous voulez trouver votre baie de charge utile avec votre Arduino, vous voudrez inclure un module GPS. Il existe plusieurs options de récupération :
1. SPOT module GPS. Ceux-ci ont leurs avantages et leurs inconvénients. Ceux-ci seront vraiment faciles à utiliser, auront une portée illimitée (ils utilisent des satellites pour envoyer des coordonnées à votre téléphone), auront une autonomie impressionnante et ils sont faciles à obtenir. Cependant, ils sont chers, ne fonctionnent pas à l'envers et le signal peut être bloqué par des objets épais.
C'est la méthode que nous avons utilisée, mais nous avons conçu et imprimé en 3D un cardan pour qu'il le maintienne droit. Nous recommandons le SPOT 3 Satellite Messenger (Amazon), mais cela dépend entièrement de vous, tant que vous faites des recherches et voyez les avantages pour les différents types.

2. Radio APRS. Ce sera le plus fiable et vous pourrez en faire beaucoup. Vous pouvez connecter un module à un Arduino et demander à la radio de renvoyer des données, des coordonnées, etc. Cela vous permettra également d'obtenir des mesures d'altitude précises.
Malheureusement, cela ne sera pas inclus dans le schéma de câblage, vous devrez donc apprendre à le câbler vous-même. De plus, vous devrez obtenir une licence radio HAM, dont vous aurez besoin pour passer un test, et payer une somme modique. Cette licence est super utile donc ça peut valoir le coup. (États-Unis - les restrictions peuvent différer selon l'endroit où vous habitez).
3. Téléphone portable. Vous ne devriez vraiment pas utiliser cette méthode. Non seulement vous devez trouver un moyen de sortir votre téléphone du mode avion après le vol, mais le téléphone portable lui-même sera probablement plus cher qu'un SPOT ordinaire. La raison pour laquelle cela figure sur la liste est que de nombreuses personnes utilisent un téléphone portable comme sauvegarde, mais ce n'est vraiment pas quelque chose que vous devriez utiliser.
Maintenant que vous avez décidé de la façon dont vous allez récupérer votre charge utile, vous voudrez voir à quoi ressemblera le vol. Par exemple, si vous souhaitez que votre Arduino déploie le parachute à distance, vous devez rechercher des moyens de le faire. Vous devez également examiner les capteurs que vous utiliserez (la température peut descendre jusqu'à -40 C (-40 F), vous devrez donc en tenir compte.
Vous voudrez également réfléchir à la façon dont vous souhaitez alimenter l'Arduino. Les températures froides réduisent les performances de nombreuses batteries, vous voudrez donc peut-être une grande alimentation, ainsi qu'un boîtier tel qu'une boîte en polystyrène pour garder les choses confortables, tout en restant sous la limite de poids.
Je vous recommande de faire une sorte de liste de contrôle en fonction du type de données que vous souhaitez obtenir, si vous aurez une caméra à bord et de ce que vous prévoyez d'avoir à bord. Il peut également être judicieux de créer la baie de charge utile, puis de concevoir votre enregistreur de données en fonction de la charge utile. Il y a beaucoup de choses à penser et à vérifier avant de concevoir réellement, alors assurez-vous de prendre un temps très long et prudent pour tout passer en revue.
Bon, voici le schéma et le schéma de câblage des capteurs si vous suivez notre itinéraire :
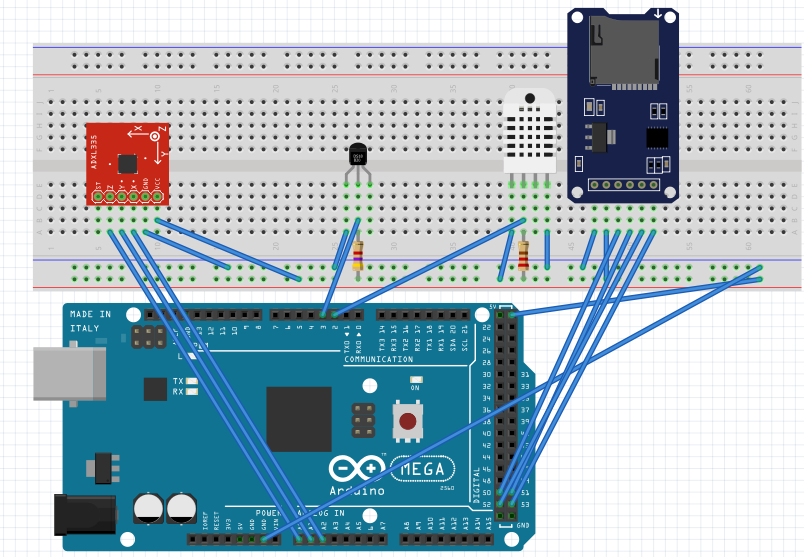
Le Mega est super exagéré pour ces capteurs, mais si vous souhaitez également utiliser notre code, vous devrez utiliser le Mega. Si vous prévoyez d'utiliser quelque chose comme un Nano, remplacez les broches du module de carte MicroSD par les broches SPI de votre carte.
Voici une liste de pièces :
SparkFun ADXL337
Broches d'en-tête
Module carte micro SD
Capteur d'humidité DHT22
Capteur de température DS18B20
Carte Proto
Arduino Méga
Vous pouvez ajouter un autre DS18B20 pour lire les températures internes et ajouter les capteurs que vous souhaitez, mais si vous souhaitez utiliser le code fourni, utilisez le schéma de câblage ci-dessus.
//Configuration DHT22#include "DHT.h"#define DHTPIN 2#define DHTTYPE DHT22DHT dht(DHTPIN, DHTTYPE);//Configuration de la carte SD#include #include Fichier sdcard_file;int CS_pin =10;//DS18B20 Capteur de température#include #include#define ONE_WIRE_BUS 3OneWire oneWire(ONE_WIRE_BUS);DallasTemperature sensor(&oneWire);int scale =3; // 3 (±3g) pour ADXL337, 200 (±200g) pour ADXL377boolean micro_is_5V =true ; // Défini sur vrai si vous utilisez un microcontrôleur 5V tel que l'Arduino Uno, faux si vous utilisez un microcontrôleur 3,3V, cela affecte l'interprétation de la configuration du capteur datavoid() {Serial.begin(9600);sensors.begin(); dht.begin(); pinMode(CS_pin, OUTPUT);//déclarer la broche CS comme broche de sortie if (SD.begin()){ Serial.print("Carte SD trouvée !"); } else { Serial.print("Erreur lors de la recherche de la carte SD"); retourner; } sdcard_file =SD.open("data.csv", FILE_WRITE); if (sdcard_file) { //Si le fichier est trouvé } else { Serial.print("erreur d'initialisation de la carte SD"); }sdcard_file.print("DS18B20");sdcard_file.print(",");sdcard_file.print("DHT22 Temp");sdcard_file.print(",");sdcard_file.print("Hum");sdcard_file.print (",");sdcard_file.print("H.InX");sdcard_file.print(",");sdcard_file.print("rawX");sdcard_file.print(",");sdcard_file.print("rawY ");sdcard_file.print(",");sdcard_file.print("rawZ");sdcard_file.print(",");sdcard_file.print("scaledX");sdcard_file.print(",");sdcard_file. print("scaledY");sdcard_file.print(",");sdcard_file.print("scaledZ");sdcard_file.print(",");sdcard_file.println(" ");}boucle vide() {délai( 222);//Accéléromètre int rawX =analogRead(A0); int rawY =analogRead(A1) ; int rawZ =analogRead(A2) ; float scaledX, scaledY, scaledZ; if (micro_is_5V) // mise à l'échelle des données si la tension est de 5 V (elle l'est) { scaledX =mapf(rawX, 0, 675, -scale, scale); scaledY =mapf(rawY, 0, 675, -scale, scale); scaledZ =mapf(rawZ, 0, 675, -scale, scale); } else // mise à l'échelle des données si la tension est de 3,3 V { scaledX =mapf(rawX, 0, 1023, -scale, scale); scaledY =mapf(rawY, 0, 1023, -scale, scale); scaledZ =mapf(rawZ, 0, 1023, -scale, scale); }//DS18B20 Tempsensors.requestTemperatures();int etemp=sensors.getTempCByIndex(0);//DS18B20 Capteur d'humidité float h =dht.readHumidity(); float t =dht.readTemperature(); float f =dht.readTemperature(true); // Vérifie si des lectures ont échoué et quitte plus tôt pour DHT if (isnan(h) || isnan(t) || isnan(f)) { return; } // Calculer l'indice de chaleur en Fahrenheit (par défaut) float hif =dht.computeHeatIndex(f, h); // Calculer l'indice de chaleur en Celsius (isFahreheit =false) float hic =dht.computeHeatIndex(t, h, false); sdcard_file.print(etemp); sdcard_file.print(","); sdcard_file.print(t); sdcard_file.print(","); sdcard_file.print(h); sdcard_file.print(","); sdcard_file.print(hic); sdcard_file.print(","); sdcard_file.print(rawX); sdcard_file.print(","); sdcard_file.print(rawY); sdcard_file.print(","); sdcard_file.print(rawZ); sdcard_file.print(","); sdcard_file.print(scaledX); sdcard_file.print(","); sdcard_file.print(scaledY); sdcard_file.print(","); sdcard_file.print(scaledZ); sdcard_file.print(","); sdcard_file.print(" "); sdcard_file.println(" ");sdcard_file.close();delay(223);}float mapf(float x, float in_min, float in_max, float out_min, float out_max){ return (x - in_min) * (out_max - out_min ) / (in_max - in_min) + out_min;} S'il y a des problèmes, assurez-vous de vérifier le câblage et utilisez le code pour chaque capteur individuel pour isoler le problème. Assurez-vous que votre carte SD ou MicroSD est formatée en FAT16 ou FAT32 et qu'elle fait 16 Go ou moins.
En outre, ce serait une bonne idée de câbler des LED pour afficher les indications d'état de votre centrale de mesure. Vous ne voulez vraiment pas envoyer le ballon vers le haut avec l'enregistreur de données qui ne fonctionne pas, alors assurez-vous de tout vérifier trois fois.
De plus, si vous continuez à avoir des problèmes avec le module de carte SD, essayez de changer la source d'alimentation. Après de nombreux tests, nous avons constaté que certains modules sont très sensibles à la puissance, alors trouvez une source d'alimentation fiable.
Voilà! Votre centrale de mesure est terminée. Il doit lire les données de température, d'humidité et d'accéléromètre et les enregistrer sur une carte SD. Si vous voulez une lecture d'altitude, vous devrez utiliser le GPS. 90% des altimètres basés sur des capteurs barométriques ne fonctionnent pas à plus de 30 000 pieds. Si votre ballon dépasse ce seuil (c'est probablement le cas), vous ne pourrez pas utiliser un baromètre. Si vous voulez un guide génial pour le reste du chemin, consultez ce guide et n'hésitez pas à nous contacter via ce site Web si vous avez des questions. Nous ne sommes pas des professionnels dans ce domaine, mais nous sommes prêts à aider au mieux de nos capacités.
Commentez ci-dessous ou contactez-nous en cas de problème, et si vous avez apprécié cette partie du guide, consultez notre chaîne YouTube, laissez un commentaire et respectez-nous ci-dessous, et nous vous recommandons de parcourir les autres voies, pour trouver de l'inspiration et des idées sympas !
Chemin 2 - PCB préconçu
Alors! Vous envisagez d'utiliser un PCB préconçu. Ce PCB préconçu vous permettra d'obtenir des lectures de température interne, de température externe, d'humidité et d'accéléromètre. Vous aurez besoin de compétences en soudure, et ces composants :
5050 LED CMS
SparkFun ADXL337
Beaucoup de broches d'en-tête
Module carte micro SD
Capteur d'humidité DHT22
Capteur de température 2X DS18B20
Arduino Méga
Le PCB Eclipse
Le fichier Gerber pour le PCB se trouve dans ce référentiel GitHub. Si vous souhaitez apporter des modifications au PCB/au schéma, accédez à cette page Web et remplissez les détails de ce dont vous avez besoin. Tels que le type de fichier, le fichier que vous voulez, les questions, etc. Nous verrons comment fonctionne ce shield PCB/Arduino, comment en commander correctement un auprès d'un service PCB (pour aussi peu que 2 $) et comment assembler le vôtre correctement.
Heureusement, nous avons utilisé ce PCB lors de notre vol, nous avons donc effectué de nombreux tests et nous avons apporté des améliorations après le vol pour vous, mais de toute façon, allons-y.
Aussi, voici quelques vidéos de l'assemblage et des détails du PCB.
Très bien, commençons par télécharger le fichier Gerber. Accédez au référentiel GitHub, téléchargez le fichier ZIP et copiez et collez le fichier Gerber Eclipse. Il est important que vous conserviez le fichier ZIP du gerber compressé, car le service en ligne les prend comme des ZIP.
Maintenant que vous l'avez déplacé, il est temps de trouver un PCB. Dans un moteur de recherche, recherchez le service PCB. Il y a beaucoup de choix, et beaucoup d'entre eux ont leurs avantages et leurs inconvénients. Pour un prix moins cher, vous pouvez envisager certaines entreprises de fabrication chinoises telles que JLC PCB. Si vous êtes prêt à payer un peu plus, vous voudrez peut-être voir certaines entreprises basées aux États-Unis. Le service auprès duquel vous achetez n'a PAS d'importance. Ils vous donneront tous un PCB de très haute qualité à un prix avantageux, c'est donc à vous de décider.
Maintenant que vous avez choisi un service, téléchargez le fichier gerber compressé et choisissez ces paramètres :
- Laissez les calques et les dimensions seuls
- PCB simple
- Épaisseur 1,6 mm
- Toute couleur que vous voulez (le vert sera généralement produit plus rapidement)
- HASL (avec plomb) pour la finition de surface. Vous devrez peut-être modifier cela si vous utilisez de la soudure sans plomb
- Poids de cuivre de 1 once
- Pas de doigts d'or et confirmation du dossier de production
- Test complet pour le test de la sonde volante
- Pas de trous crénelés
- Toute quantité que vous voulez !
La plupart de ces paramètres seront déjà définis, vous n'aurez donc qu'à changer de couleur. Allez-y et commandez, et votre PCB commencera la production ! C'est peut-être aussi le bon moment pour commander les capteurs énumérés ci-dessus.
Il est maintenant temps d'assembler le PCB. Étant donné que nous utilisons des capteurs avec des cartes de dérivation et que ce PCB agira comme un bouclier, ce sera vraiment facile. Vous trouverez ci-dessous un guide de soudure.
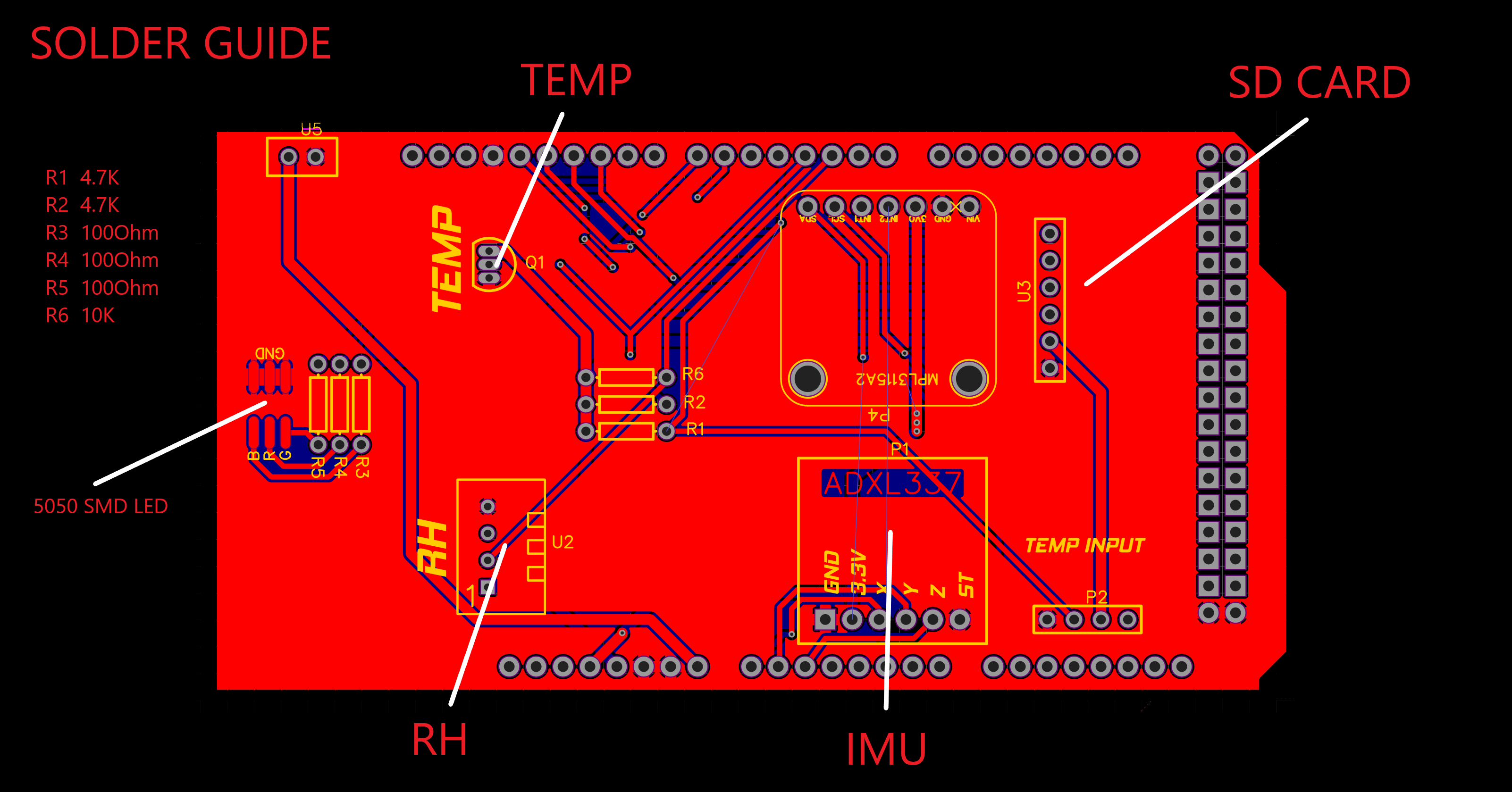
De plus, soudez toutes les broches d'en-tête sur les côtés du PCB. Ceux-ci s'adapteront directement au-dessus d'un Arduino Mega et feront tout le câblage pour vous.
Il est important de savoir comment ce PCB fonctionne de cette façon, vous savez comment réparer les choses si elles se cassent. À l'intérieur du PCB, il y a de très petits fils de 0,35 mm qui le traversent. Ces fils iront de chaque capteur à certaines broches d'en-tête du PCB, qui se connecteront ensuite à l'Arduino. Cela donne une construction propre, et elle est plus solide et plus fiable que les protoboards et les breadboards traditionnels. Ceci est un bref aperçu, mais si vous voulez en savoir plus, voici une excellente vidéo sur le fonctionnement des PCB.
Oui! Le PCB est soudé, placez-le sur l'Arduino Mega et branchez-le sur l'ordinateur. Ouvrez l'IDE Arduino et ouvrez le code 1.6 inclus avec le référentiel GitHub à partir duquel vous avez obtenu vos fichiers PCB.
Formatez votre carte microSD en FAT16 ou FAT32. Le module de carte microSD doit faire 16 Go ou moins, sinon il ne fonctionnera pas. Même une caméra microSD de 2 Go sera plus que suffisante pour un vol de deux heures.
Insérez maintenant la carte SD dans le module et téléchargez le code 1.6. Dans le moniteur série, vous devriez recevoir un message indiquant que la carte SD a fonctionné et l'enregistrement des données devrait commencer immédiatement.
Attendez dix secondes, puis retirez la carte SD et insérez-la dans un ordinateur. Il devrait y avoir un fichier.csv qui contient toutes vos données !
Voici le code au cas où le dépôt GitHub ne fonctionnerait pas.
//Configuration DHT22#include "DHT.h"#define DHTPIN 2#define DHTTYPE DHT22DHT dht(DHTPIN, DHTTYPE);//Configuration de la carte SD#include #include Fichier sdcard_file;int CS_pin =10;//DS18B20 Capteur de température#include #include#define ONE_WIRE_BUS 3OneWire oneWire(ONE_WIRE_BUS);DallasTemperature sensor(&oneWire);//MPL3115A2 Configuration de l'altimètre #include Adafruit_MPL3115A2 baro =Adafruit_MPL3115A2();int scale =3;boolean micro_is_5V =true;//LEDint Blue =7;int Red =6;int Green =5;void setup() {pinMode(23, ENTREE); //détecte si un commutateur est activé pour arrêter l'écriture de la carte SD et pour enregistrer les données.begin();pinMode(Blue, OUTPUT);pinMode(Red, OUTPUT);pinMode(Green, OUTPUT);digitalWrite(Green, HIGH ); dht.begin(); pinMode(CS_pin, OUTPUT);//déclarer la broche CS comme broche de sortie if (SD.begin()){ digitalWrite(Green, LOW); digitalWrite(Vert, ÉLEVÉ); digitalWrite(Vert, FAIBLE); digitalWrite(Vert, ÉLEVÉ); digitalWrite(Vert, FAIBLE); digitalWrite(Vert, ÉLEVÉ); } else { digitalWrite(Green, LOW); digitalWrite(Rouge, ÉLEVÉ); retard (5000); retourner; } sdcard_file =SD.open("data.csv", FILE_WRITE); if (sdcard_file) { //Si le fichier est trouvé digitalWrite(Red, LOW); digitalWrite (Bleu, BAS); digitalWrite(Vert, ÉLEVÉ); } else { digitalWrite(Green, LOW); digitalWrite(Rouge, ÉLEVÉ); retard(1000); digitalWrite(Rouge, FAIBLE); digitalWrite (Bleu, ÉLEVÉ); retard(1000); digitalWrite(Vert, FAIBLE); digitalWrite(Rouge, ÉLEVÉ); retard(1000); digitalWrite(Rouge, FAIBLE); digitalWrite (Bleu, ÉLEVÉ); retard(1000); digitalWrite(Rouge, ÉLEVÉ); digitalWrite (Bleu, BAS); }sdcard_file.print(",");sdcard_file.print("DS18B20");sdcard_file.print(",");sdcard_file.print("DHT22 Temp");sdcard_file.print(",");sdcard_file.print ("Hum");sdcard_file.print(",");sdcard_file.print("H.InX");sdcard_file.print(",");sdcard_file.print("Int. Temp");sdcard_file.print( ",");sdcard_file.print("Pres. Pasc.");sdcard_file.print(",");sdcard_file.print("alt.");sdcard_file.print(",");sdcard_file.print(" rawX");sdcard_file.print(",");sdcard_file.print("rawY");sdcard_file.print(",");sdcard_file.print("rawZ");sdcard_file.print(",");sdcard_file .print("scaledX");sdcard_file.print(",");sdcard_file.print("scaledY");sdcard_file.print(",");sdcard_file.print("scaledZ");}boucle vide() { delay(222);digitalWrite(Green, LOW);digitalWrite(Blue, HIGH);if(! baro.begin()) {}float pascals =baro.getPressure();float altm =baro.getAltitude();float tempC =baro.getTemperature();//Accéléromètre int rawX =analogRead(A0); int rawY =analogRead(A1) ; int rawZ =analogRead(A2) ; float scaledX, scaledY, scaledZ; if (micro_is_5V) // mise à l'échelle des données si la tension est de 5 V (elle l'est) { scaledX =mapf(rawX, 0, 675, -scale, scale); scaledY =mapf(rawY, 0, 675, -scale, scale); scaledZ =mapf(rawZ, 0, 675, -scale, scale); } else // mise à l'échelle des données si la tension est de 3,3 V { scaledX =mapf(rawX, 0, 1023, -scale, scale); scaledY =mapf(rawY, 0, 1023, -scale, scale); scaledZ =mapf(rawZ, 0, 1023, -scale, scale); }//DS18B20 Tempsensors.requestTemperatures();//DS18B20 Capteur d'humidité float h =dht.readHumidity(); float t =dht.readTemperature(); float f =dht.readTemperature(true); // Vérifie si des lectures ont échoué et quitte plus tôt pour DHT if (isnan(h) || isnan(t) || isnan(f)) { return; } // Calculer l'indice de chaleur en Fahrenheit (par défaut) float hif =dht.computeHeatIndex(f, h); // Calculer l'indice de chaleur en Celsius (isFahreheit =false) float hic =dht.computeHeatIndex(t, h, false); sdcard_file.println(sensors.getTempCByIndex(0)); sdcard_file.print(","); sdcard_file.print(t); sdcard_file.print(","); sdcard_file.print(h); sdcard_file.print(","); sdcard_file.print(hic); sdcard_file.print(","); sdcard_file.print(tempC); sdcard_file.print(","); sdcard_file.print(pascals); sdcard_file.print(","); sdcard_file.print(altm); sdcard_file.print(","); sdcard_file.print(rawX); sdcard_file.print(","); sdcard_file.print(rawY); sdcard_file.print(","); sdcard_file.print(rawZ); sdcard_file.print(","); sdcard_file.print(scaledX); sdcard_file.print(","); sdcard_file.print(scaledY); sdcard_file.print(","); sdcard_file.print(scaledZ); sdcard_file.print(",");delay(223);sdcard_file.close();}float mapf(float x, float in_min, float in_max, float out_min, float out_max){ return (x - in_min) * (out_max - out_min) / (in_max - in_min) + out_min;} Voilà! Votre centrale de mesure est terminée. Il doit lire les données de température, d'humidité et d'accéléromètre et les enregistrer sur une carte SD. Si vous voulez une lecture d'altitude, vous devrez utiliser le GPS. 90% des altimètres basés sur des capteurs barométriques ne fonctionnent pas à plus de 30 000 pieds. Si votre ballon dépasse ce seuil (c'est probablement le cas), vous ne pourrez pas utiliser un baromètre. Si vous voulez un guide génial pour le reste du chemin, consultez ce guide et n'hésitez pas à nous contacter via ce site Web. Si vous avez des questions ou si vous souhaitez créer un meilleur PCB basé sur notre conception. Nous ne sommes pas des professionnels dans ce domaine, mais nous sommes prêts à aider au mieux de nos capacités.
Commentez ci-dessous ou contactez-nous en cas de problème, et si vous avez apprécié cette partie du guide, consultez notre chaîne YouTube, laissez un commentaire et respectez ci-dessous, et nous vous recommandons de parcourir les autres voies, pour trouver de l'inspiration et des idées sympas !
Chemin 3 - Faire votre propre PCB
Maintenant, ce guide ne vous montrera PAS comment créer votre propre PCB. Donc avant d'aller de l'avant, vous devez savoir comment faire un PCB, ou apprendre à le faire. Cette partie ne fera que passer en revue quelques directives de base que vous devrez parcourir pour vous assurer que vous n'enfreignez aucune loi. Les directives publiées sont pour les États-Unis !
Tout d'abord, vous devrez réfléchir et écrire les choses que vous voulez obtenir de ce vol.
Voici quelques éléments du vol standard :
- Température
- Humidité
- Altitude
- Qualité de l'air
- Rayonnement
- GPS
Vous pouvez inclure tout ce que vous voulez, mais assurez-vous de tout regarder. Le capteur de température doit pouvoir lire jusqu'à -50 C (-58 F) et être aussi précis que possible. La lecture de la température sera inexacte à très haute température en raison du rayonnement solaire du soleil, cela semblera donc un peu plus chaud qu'il ne l'est !
Vous voudrez également réfléchir à la façon de récupérer cette chose. Voici un bref aperçu de vos options. Vous voudrez peut-être approfondir vos recherches à ce sujet.
Module GPS SPOT. Ceux-ci ont leurs avantages et leurs inconvénients. Ceux-ci seront vraiment faciles à utiliser, auront une portée illimitée (ils utilisent des satellites pour envoyer des coordonnées à votre téléphone), auront une autonomie impressionnante et ils sont faciles à obtenir. Cependant, ils sont chers, ne fonctionnent pas à l'envers et le signal peut être bloqué par des objets épais.
C'est la méthode que nous avons utilisée, mais nous avons conçu et imprimé en 3D un cardan pour qu'il le maintienne droit. Nous recommandons le SPOT 3 Satellite Messenger (Amazon), mais cela dépend entièrement de vous, tant que vous faites des recherches et voyez les avantages pour les différents types.
2. Radio APRS. Ce sera le plus fiable et vous pourrez en faire beaucoup. Vous pouvez connecter un module à un Arduino et demander à la radio de renvoyer des données, des coordonnées, etc. Cela vous permettra également d'obtenir des mesures d'altitude précises.
Vous devrez obtenir une licence radio HAM, dont vous aurez besoin pour passer un test, et payer une somme modique. Cette licence est super utile donc ça peut valoir le coup. (États-Unis - les restrictions peuvent différer selon l'endroit où vous habitez).
3. Téléphone portable. Vous ne devriez vraiment pas utiliser cette méthode. Non seulement vous devez trouver un moyen de sortir votre téléphone du mode avion après le vol, mais le téléphone portable lui-même sera probablement plus cher qu'un SPOT ordinaire. La raison pour laquelle cela figure sur la liste est que de nombreuses personnes utilisent un téléphone portable comme sauvegarde, mais ce n'est vraiment pas quelque chose que vous devriez utiliser.
Il s'agit d'une instructable qui peut vous aider dans votre conception. Il existe de nombreuses restrictions et éléments à prendre en compte pour cela, alors prenez votre temps !
Une autre considération de conception est le poids. Comme mentionné dans l'introduction de ce guide, votre charge utile doit être inférieure à 12 lb, 6 lb ou 4 lb, en fonction du type de charge utile. De plus, vous ne pourrez pas utiliser un baromètre pour les lectures d'altitude, car la majorité d'entre eux échouent au-delà de 30 000 pieds.
La dernière considération est le pouvoir. Les températures vont devenir très basses dans la stratosphère. Les batteries vont tomber en panne, votre Arduino a également de très fortes chances de tomber en panne. Vous devrez trouver une solution à cela. La meilleure stratégie est sans doute de coller votre centrale de mesure dans une boîte en polystyrène. Cela maintiendra les températures à l'intérieur aussi élevées que la température ambiante. Vous pouvez également envisager des panneaux solaires ou des chauffe-mains.
D'accord! Vous avez tout réfléchi, vérifié les capteurs que vous voulez et tout noté. Il est temps de faire le schéma et le PCB. Pour le schéma et le PCB, vous voudrez peut-être créer un blindage PCB comme avant, ou un PCB complet. Je vous laisse décider (puisque vous devriez être un peu expérimenté pour cela).
Après avoir construit votre PCB/shield, vérifiez TOUT pour voir si cela fonctionne et assurez-vous que vous suivez les directives.
Voilà! Votre centrale de mesure est terminée. Il doit lire les données de température, d'humidité et d'accéléromètre et les enregistrer sur une carte SD. Si vous voulez une lecture d'altitude, vous devrez utiliser le GPS. 90% des altimètres basés sur des capteurs barométriques ne fonctionnent pas à plus de 30 000 pieds. Si votre ballon dépasse ce seuil (c'est probablement le cas), vous ne pourrez pas utiliser un baromètre. Si vous voulez un guide génial pour le reste du chemin, consultez ce guide et n'hésitez pas à nous contacter via ce site Web si vous avez des questions. Nous ne sommes pas des professionnels dans ce domaine, mais nous sommes prêts à aider au mieux de nos capacités.
Commentez ci-dessous ou contactez-nous en cas de problème, et si vous avez apprécié cette partie du guide, consultez notre chaîne YouTube, laissez un commentaire et respectez ci-dessous, et nous vous recommandons de parcourir les autres voies, pour trouver de l'inspiration et des idées sympas !
Conclusion
Les ballons météo sont un moyen vraiment cool et simple d'envoyer des objets dans la stratosphère. Vous pouvez envoyer des caméras (dans notre cas, une caméra 360) à haute altitude, obtenir des images et des données impressionnantes, sans trop de réglementations. Mais une chose !
LIRE CECI !!
Veuillez vous assurer de respecter toutes les règles, d'ajouter un déflecteur de radar et de déposer un NOTAM (avis aux aviateurs) avant votre vol. Il est très possible que votre charge utile de ballon heurte un avion, et vous ne voulez PAS endommager ou risquer des vies. Faites tout votre possible pour réduire les risques de dommages, assurez-vous que tout est solide pour ne rien laisser tomber. La FAA n'a pas beaucoup de restrictions à ce sujet. S'il vous plaît, ne faites pas en sorte qu'ils doivent tout restreindre et tout gâcher pour les autres en suivant simplement les règles.
Quoi qu'il en soit, j'espère vraiment que ce guide vous a aidé, et nous aimons créer des guides comme ceux-ci. Si vous souhaitez soutenir notre club, pensez à vous abonner à notre chaîne YouTube, et n'oubliez pas de commenter ou de nous contacter si vous avez des problèmes ou des questions !
Bon Arduino ! (est-ce même un terme ?)
Avis sur les fusées NM
Pièces et boîtiers personnalisés
This is the .stl for the gimbal we made for the Spot Personal Tracker to keep it upright during the flight.stl file for the gimbal we used to keep the SPOT Personal Tracker UprightSchémas
For Path 1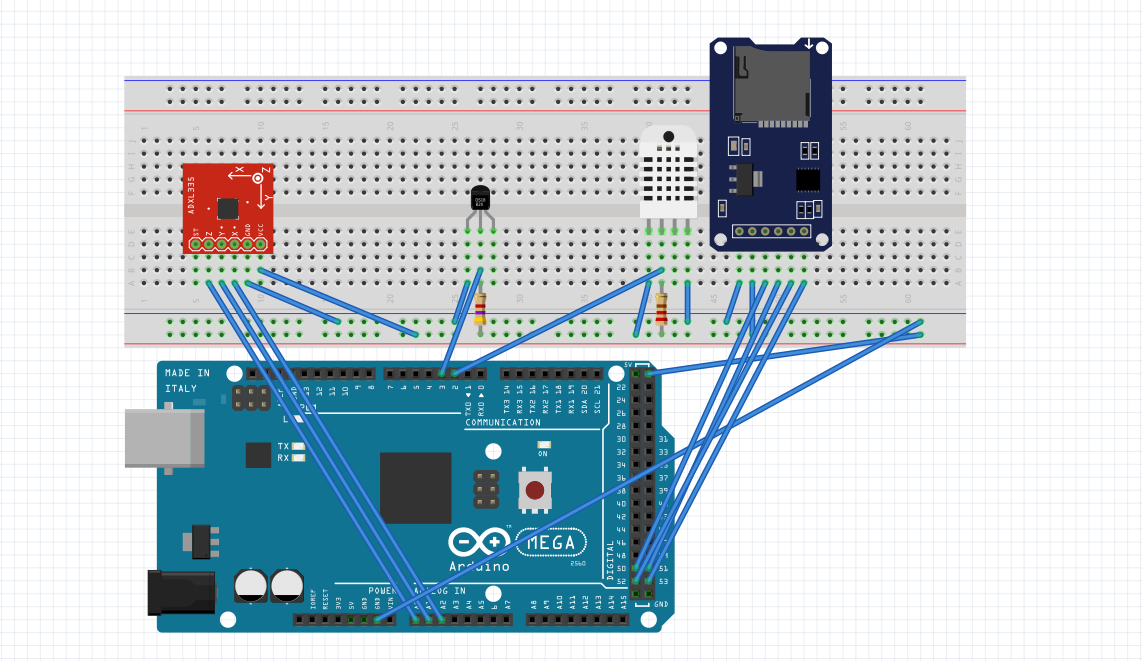 For reference
For reference 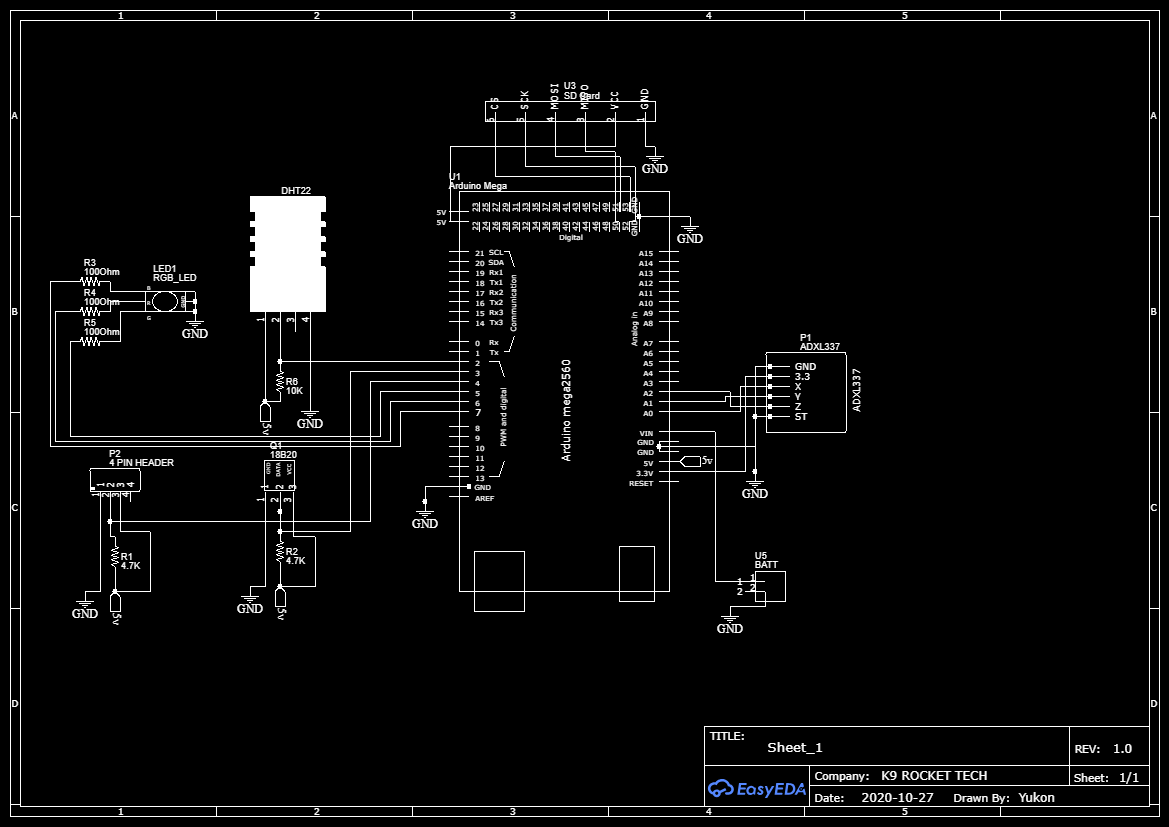
GitHub Repository for PCB files and Code
Use this to download Gerber file for predesigned PCB and the code for it.https://github.com/nmrocketryreviews/HADLdataloggerProcessus de fabrication