Lévitation électromagnétique répulsive Arduino
Composants et fournitures
 | | × | 1 | |
 | | × | 1 | |
| | × | 1 | |
| | Capteur à effet hall linéaire UGN3503 |
| × | 1 | |
| | | RobotGeek Medium Solénoïde |
| × | 1 | |
| | Grand aimant de haut-parleur |
| × | 1 | |
Applications et services en ligne
À propos de ce projet
Il y a quelques années j'essayais de fabriquer un appareil de lévitation magnétique répulsive mais tous les circuits que j'avais étaient complexes et le réglage était très difficile.
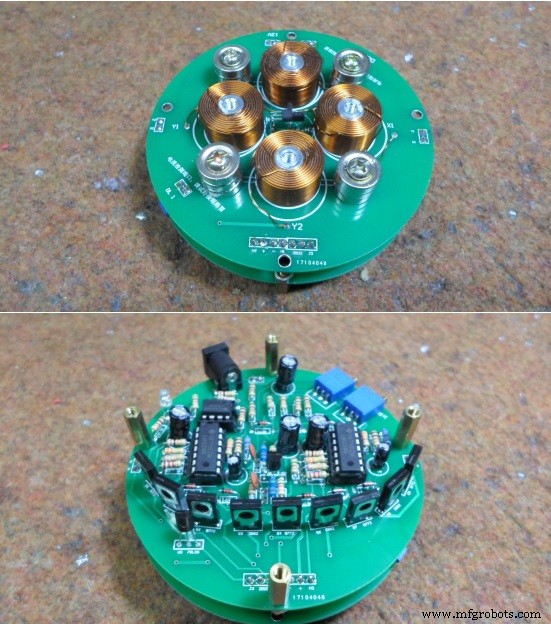
Après plusieurs tentatives infructueuses et semi-réussies, j'ai acheté le lévitateur que vous pouvez voir sur la photo, mais c'est presque impossible de le faire à la maison (bricolage).
Maintenant, je vais vous présenter un Levitator répulsif qui, outre la carte Arduino, ne contient que quelques composants supplémentaires et il est très facile pour le bricolage :
- Tout transistor de puissance intermédiaire :dans mon cas BD241
- Diode universelle 1N4001
- Résistance 1 Kohm
- Capteur à effet Hall UGN3503 (vous pouvez utiliser n'importe quel capteur à effet Hall RATIOMETRIQUE 5 V)
- Aimant tore d'une ancienne enceinte (d'un diamètre de 9cm à 11cm et plus).
- Au lieu d'un grand aimant tore, il peut être utilisé des groupes de petits aimants en néodyme déployés comme un hexagone régulier, comme dans les appareils commerciaux.
- Solénoïde composé d'environ 200 enroulements de fil de cuivre isolé 30AWG. Dans ce cas, j'ai utilisé un solénoïde retiré de l'ancien tiroir-caisse.
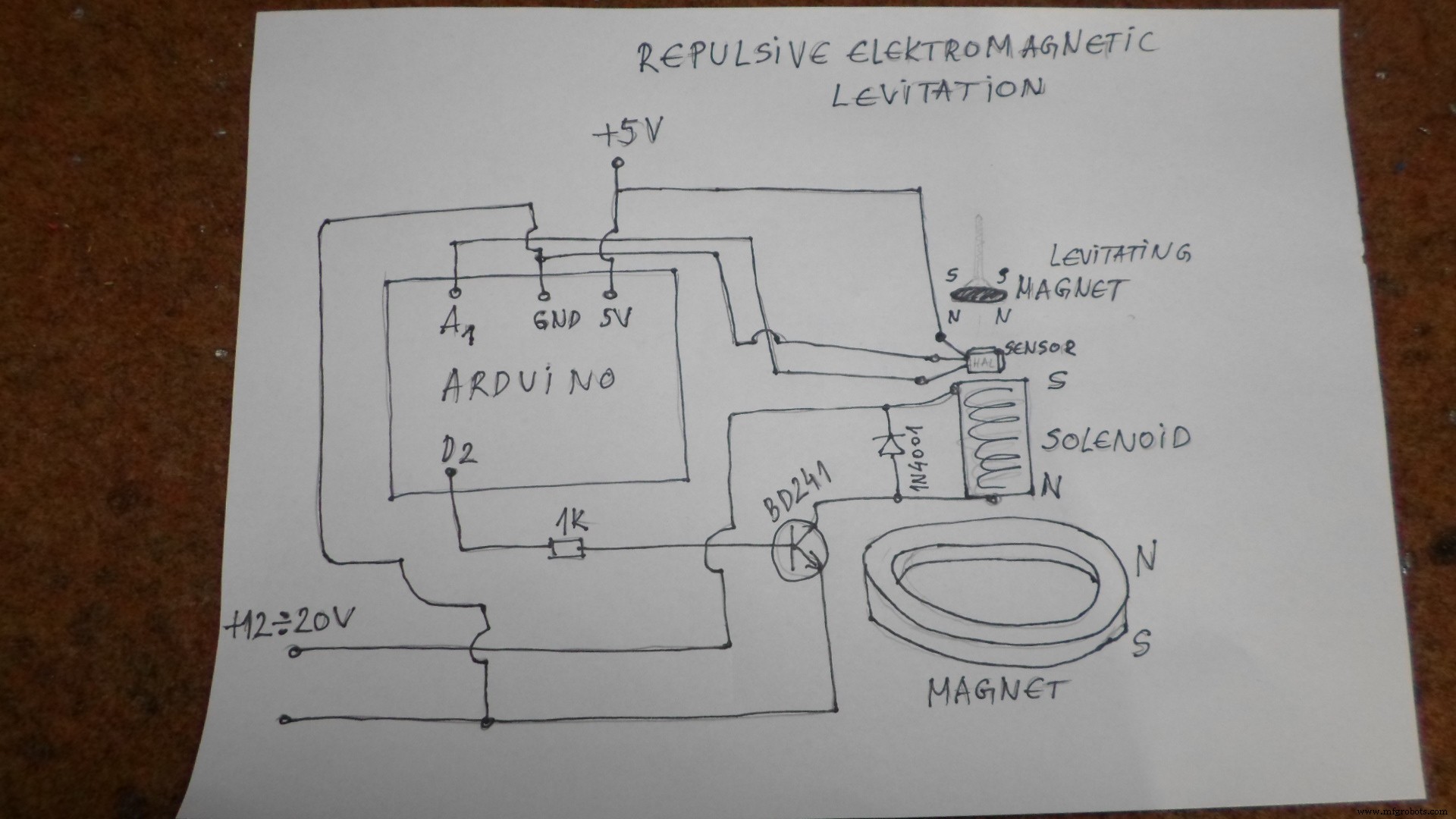
Le circuit est très simple et est présenté ci-dessous dans l'image. Arduino est alimenté par défaut avec 5V et solénoïde via transistor avec 12v-20v.Les deux ont une masse commune.La polarité des aimants et du solénoïde est indiquée sur la figure.Pour le réglage, vous aurez besoin d'un peu de patience et de temps, et en fait il y a le plaisir de faire un appareil.Le capteur hal doit être en haut au dessus du solénoïde.Au dessus de celui-ci est placé l'aimant qui doit flotter.Dans mon cas, le réglage était de déplacer l'aimant du tore de haut en bas.En plus du matériel, il est également un paramètre dans le code en modifiant la valeur de la première ligne du code et peut aller de 200 à 350. Avec une combinaison de ces deux paramètres, nous obtenons les meilleurs résultats.
Code
Fichier sans titreArduino
int set_point =250 ; // settingsint sensorPin =A1;int output_pin =2;int sensorValue =0;void setup() { Serial.begin(9600); pinMode(output_pin, OUTPUT);}void loop() { sensorValue =analogRead(sensorPin); //Serial.println(sensorValue); if( sensorValue <=set_point) digitalWrite(output_pin, LOW); else digitalWrite(output_pin, HIGH); } Schémas