


Walbi, le bipède qui marche
Composants et fournitures
 |
| × | 1 | |||
| × | 10 | ||||
| × | 1 |
Outils et machines nécessaires
 |
|
Applications et services en ligne
 |
|
À propos de ce projet
Ne serait-il pas formidable de pouvoir fabriquer un robot bipède avec des servos ? L'Inner Geek l'a pensé et voici le résultat…
C'est Walbi, le WALink BIped, un robot que nous avons créé pour un projet d'apprentissage automatique qui n'a jamais décollé (Walbi non plus, mais c'est parce qu'il a les deux pieds solidement plantés sur le sol).
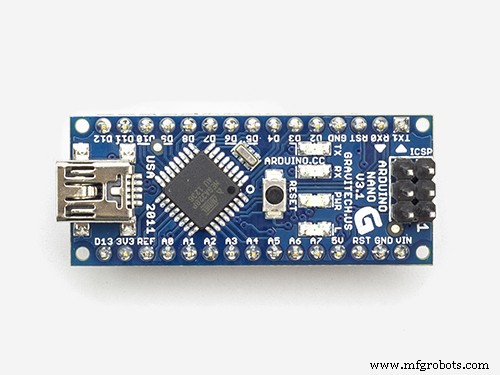
Walbi utilise un Arduino Nano pour le « cerveau », des servos LX-16A pour les « muscles » et des pièces en plastique imprimées en 3D pour les « os ». Les servos LewanSoul LX-16A sont des servos de rêve pour les petits (ish) projets robotiques, car ils sont légers, peuvent se déplacer de plus de 19 kg.cm et sont connectés avec un seul câble, allant de servo à servo, rendant le câblage du robot enfant jouer.
Walbi est un humanoïde à l'échelle 2:1 et ses jambes mesurent 55 cm (21,7 pouces) du talon à la taille et pèsent 1, 1 kg (2,4 lb). Les parties blanches de son corps ont été imprimées en 3D, mais auraient tout aussi bien pu être faites de bois léger et robuste.
La programmation de Walbi est très simple. Vous pouvez télécharger ci-dessous les deux programmes nécessaires à la capture et à la lecture de mouvements, et avec ensuite vous pouvez faire marcher, ramper, grimper, sauter ou danser Walbi ! Vous n'avez qu'à déplacer ses jambes dans la pose souhaitée, enregistrer cette pose, lui donner une autre pose, l'enregistrer et ainsi de suite, puis, lorsque vous avez enregistré la séquence complète, vous pouvez vous asseoir et le regarder exécuter habilement le mouvements que vous lui avez appris.
Peut-être que vous pouvez enseigner la vôtre à la danse fluviale 😀
Construire le Walbi
Walbi a été imprimé en 3D dans du plastique PLA, à l'aide d'une imprimante FlashForge Creator Pro. Vous pouvez télécharger les fichiers STL à partir de Thingiverse, ou utiliser une autre méthode pour construire les pieds, les « os » des jambes et la taille, en utilisant du bois ou du métal. Les supports de servos se fixent à ces pièces, aux servos et entre eux.
Vous aurez besoin de supports métalliques des quatre types différents disponibles pour attacher les servos aux pièces imprimées et entre eux (plus d'informations et de photos disponibles dans le blog Release The Inner Gook).
Câblage
Afin de contrôler les servos LX-16A, vous avez besoin d'une carte de débogage LewanSoul.
Il recevra les commandes d'un port série sur l'Arduino Nano. Comme nous utilisions la série matérielle de l'Arduino pour communiquer avec l'ordinateur, nous avions utilisé la bibliothèque SoftwareSerial pour créer un deuxième port série sur le Nano, afin de se connecter à la carte de débogage.
Le câblage est minimisé avec les servos en série. Il y a un câble de chaque servo au suivant (câble série fourni avec les servos) et les servos à la taille se branchent directement sur la carte de débogage. Votre ordinateur se connecte au port USB de l'Arduino et l'Arduino est connecté à la carte de débogage à l'aide de trois cavaliers (TX, RX et GND) connectés aux broches Arduino que vous configurez pour SoftwareSerial - nous avons utilisé les broches 10 et 1 dans le code1 .
Les servos utilisent un débit en bauds de 115200 (si vous savez comment le changer, veuillez nous le dire, car c'est trop élevé). Ce débit en bauds est élevé pour SoftwareSerial, nous avons donc dû implémenter des fonctionnalités de vérification des erreurs et de réessai. Dans certains cas, la persistance était nécessaire pour obtenir une lecture correcte.
Puissance
Les servos peuvent fournir 19.5kg.cm à 7.4v. Nous avons utilisé 6v et le courant de décrochage était inférieur à trois ampères.
Programmation
Vous pouvez obtenir le code Arduino dans le référentiel Github du projet.
Deux programmes sont utilisés pour la capture de mouvement et la relecture, une technique similaire à celle utilisée dans les films. Vous commencez par façonner le robot dans une pose. Comme les servos sont désactivés par défaut, vous pouvez faire pivoter les servos à la main. Une fois que vous avez le robot dans la pose souhaitée, vous utilisez le programme Walbi_record pour lire et afficher tous les angles d'asservissement. Vous alimentez ensuite ces lectures d'angle dans la variable poseAngles dans Walbi_play et utilisez le programme pour lire la séquence de poses enregistrées, à une vitesse définie à l'aide de la variable timeToMove (en millisecondes).
Nous espérons que vous avez apprécié le projet. N'hésitez pas à partager votre amour en laissant un commentaire, en vous abonnant au blog ou tout autre type d'action de rétroaction. Nous l'apprécions !
Pépites de geek intérieures
Voici quelques trucs et astuces appris lors de la création de Walbi :
- Les supports du LX-16A ne se fixent au servo que dans UNE position, il est donc très facile de les connecter de manière incorrecte, en particulier aux pièces imprimées en 3D. Nous avons dû réassembler Walbi plusieurs fois pour corriger des erreurs de montage assez difficiles à repérer.
- Les servos sont livrés avec l'ID 1 par défaut. Attribuez à chaque servo un identifiant différent avant de les monter sur le robot, ou il sera impossible de communiquer avec plusieurs servos série connectés avec le même identifiant.
- L'utilisation de serre-câbles améliore vraiment l'apparence
- Les servos sont livrés avec les vis nécessaires pour relier les palonniers aux servos et les palonniers aux supports. Les supports sont livrés avec les vis nécessaires pour les fixer aux servos. Vous devrez acheter séparément des vis pour le support des connexions et le support de la connexion des pièces en plastique. Nous avons utilisé des vis et des écrous DIN912 M2-6 et M2-10.
- Vous pouvez améliorer la traction en collant des coussinets en silicone sur la plante des pieds du robot.
- Il est préférable d'utiliser des palonniers en métal, car ceux en plastique fournis avec les servos se déchirent si (quand) les pattes se heurtent pendant les tests. Si les cornes se déchirent, le robot gagnera du mou et la lecture des mouvements perdra en précision (ce qui est autrement étonnamment bon).
Code
Programmes Arduino pour le contrôle de mouvement et la lecture
https://github.com/ptavaressilva/WalbiPièces et boîtiers personnalisés
STL pour pièces imprimées en 3D
Imprimé à l'origine sur un fichier Flash Forge Creator ProCAD sur thingverse.comProcessus de fabrication