


Can Bus Shield :Tout savoir sur ce contrôleur automobile
À l'époque, la technologie automobile n'était pas aussi avancée qu'aujourd'hui. Diverses innovations sont venues, l'une d'entre elles étant le bouclier de bus Can. Grâce à lui, les véhicules modernes sont désormais plus intelligents. Des informations telles que le régime moteur réel et la vitesse du véhicule via le circuit électrique de la voiture sont désormais disponibles.
Par conséquent, sa popularité n'est pas une surprise en raison de sa fiabilité et de sa vitesse de communication moyenne. Par la suite, nous discutons des capacités du bus Can et de la manière de les utiliser avec des microcontrôleurs.
1. Qu'est-ce que le can bus ?
Le bouclier Can-Bus est un contrôleur industriel que l'on trouve dans les machines-outils modernes. Un bon exemple concerne les diagnostics embarqués, qui utilisent un message valide provenant de mini-moteurs ou d'un TIPM pour faire fonctionner les fonctions électroniques.
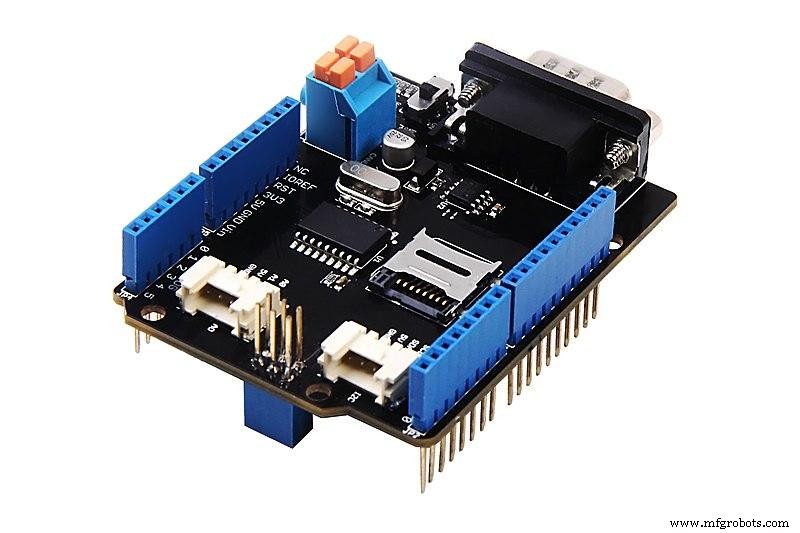
(Une puce Can-bus shield V2).
https://commons.wikimedia.org/wiki/File:CAN_BUS_Shield_V2.jpg
2. Fonctionnalités
Le bouclier Can-bus possède plusieurs caractéristiques qui le rendent unique et efficace. Ils incluent :
- La broche CS est compatible avec le stockage de données sur carte TF et dispose d'un emplacement pour carte SD pour le stockage des messages.
- Normalement, son brochage standard a une broche de sélection de puce modifiable.
- Il utilise des trames distantes CAN version 2 avec une vitesse de données de 1 Mo par seconde.
- De plus, son brochage par défaut utilise un connecteur sub-D standard industriel à neuf broches.
- En outre, il permet une fonction sélectionnable de brochage CAN et OBD-II.
- De plus, il possède une broche INT remplaçable.
- Une autre fonctionnalité intéressante est la prise en charge d'un cadre standard, deux méthodes de réception et la compatibilité avec l'interface standard Arduino.
- Néanmoins, il dispose de connecteurs de module de bus Can Grove pour UART et I2C.
3. Matériel et logiciel
R. Matériel
- Interface d'alimentation DB9.
- V_OBD.
- Indicateurs LED :
- PWR :
- TX.
- RX. V_OBD.
- INT
- Bornes – Pour CAN_L et CAN_H.
- Brochage Arduino UNO.
- Connecteurs série Grove.
- Connecteurs I2C Grove.
- Broches ICSP.
- Contrôleur Can-bus MCP2551 – Émetteur-récepteur CAN à haute vitesse.
- Contrôleur Can-bus MCP2515 – Contrôleur CAN unique intégré à une interface SPI.
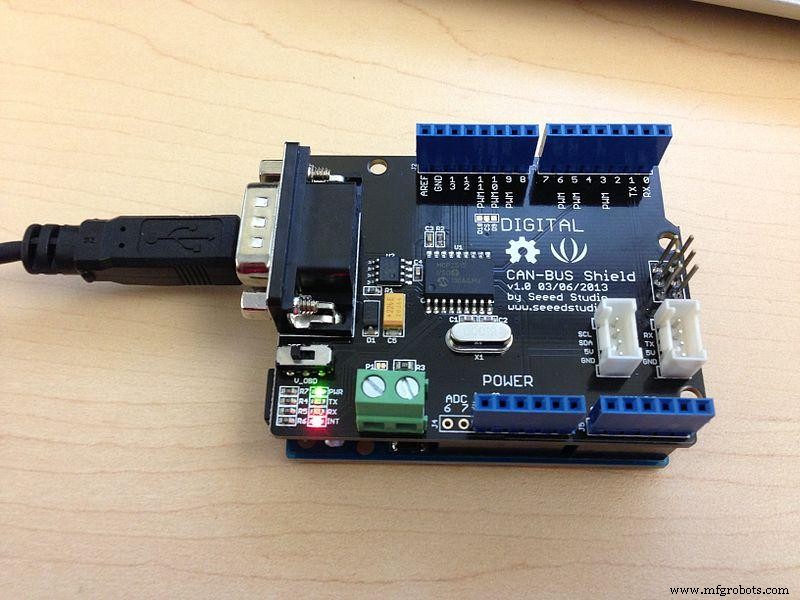
(Un bouclier Can-bus avec Arduino Uno).
https://commons.wikimedia.org/wiki/File:Arduino_Uno_with_CAN-bus_shield.JPG
B. Logiciel
Généralement, le logiciel est compatible avec les interfaces standard Arduino telles que Arduino Uno, Arduino Leonardo ou Arduino MEGA.
4. Comment fonctionne Can-bus Shield?
https://www.youtube.com/watch?v=PEI5EWSgaRk
(Cette vidéo vous explique comment fonctionne un bouclier Can-bus).
5. Fonctionnement d'entrée de gamme de Can Bus Shield
Pour commencer à utiliser le bouclier Can-bus, vous devez suivre les étapes ci-dessous.
Matériel nécessaire
- 2 blindages CAN-bus pour la communication CAN-bus SPI.
- 2 microcontrôleurs Seeeduino V4.2.
- Câbles de raccordement pour la connexion des shields Can-bus et des contrôleurs Seeeduino.
Connexion matérielle
Tout d'abord, vous devez placer les deux boucliers Can-bus dans la version Seeeduino 4.2. Ensuite, vous connectez ces deux blindages de bus CAN avec des fils de liaison. Connectez-les ainsi :
CAN_L à CAN_L et CAN_H à CAN_H.
Installation du logiciel
Pour l'installation du logiciel, vous devez consulter la bibliothèque Arduino pour le Can-Bus. Après cela, définissez un nœud comme maître tandis que l'autre fonctionne comme esclave.
Code
Téléchargez le code approprié dans l'IDE Arduino pour terminer la programmation de votre bouclier Can-bus.
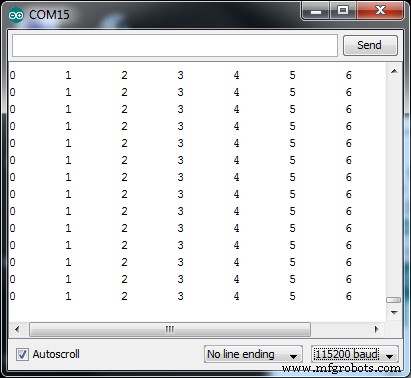
(Un moniteur série montrant les données envoyées et reçues entre deux boucliers Can-bus).
6. Foire aux questions
Les boucliers Can-bus sont-ils compatibles avec Arduino ?
Oui. Le contrôleur est entièrement compatible avec Arduino Uno, Arduino MEGA et Arduino Leonardo.
Comment changer la broche SS ?
Suivez les quelques étapes ci-dessous :
- Tout d'abord, utilisez un couteau pour couper le câble en cuivre entre le numérique dix et CS.
- Ensuite, soudez le fil de cuivre pour le connecter à D9.
- Ensuite, allez à la bibliothèque et changez la broche SS en conséquence.
Échec de l'initialisation des boucliers CAN-BUS
Pour le bouclier Can-bus V1.1 au bouclier Can-bus V2 et supérieur, vous devez modifier le code ainsi :
MCP_CAN CAN(9); // Définissez CS sur la broche 9.
Conclusion
En résumé, les boucliers de bus CAN sont parfaits pour les applications automobiles. Cependant, à l'aide d'un microcontrôleur Arduino, il fonctionne sur des codes pour contrôler plusieurs éléments sur le tableau de bord de votre voiture.
Ainsi, construire et programmer des projets impressionnants avec le module Can-bus shields est devenu plus facile. Par conséquent, contactez-nous si vous avez besoin d'une assistance professionnelle pour des projets de construction comme ceux-ci. Bienvenue à nous contacter.
Technologie industrielle
- Arduino Spybot
- L'usine intelligente de l'industrie 4.0 est tout au sujet de ces données
- Tout sur l'oxygaz
- Technologie de montage en surface - De quoi s'agit-il ?
- Tout sur le moulage de précision pour les applications aérospatiales
- Comprendre ce qu'est l'électroérosion par enfonçage
- Comprendre ce qu'est l'usinage dur
- Comprendre un moteur automobile
- Comprendre un relais automobile