


Fonctionnement du moteur sans balais et de l'ESC
Dans ce tutoriel, nous allons apprendre comment fonctionnent le moteur brushless et l'ESC. Cet article est la première partie de la vidéo suivante, où nous apprendrons le principe de fonctionnement d'un moteur à courant continu sans balais et d'un ESC (contrôleur de vitesse électronique), et dans la deuxième partie, nous apprendrons comment contrôler un moteur BLDC à l'aide d'Arduino.
Vous pouvez regarder la vidéo suivante ou lire le didacticiel écrit ci-dessous.
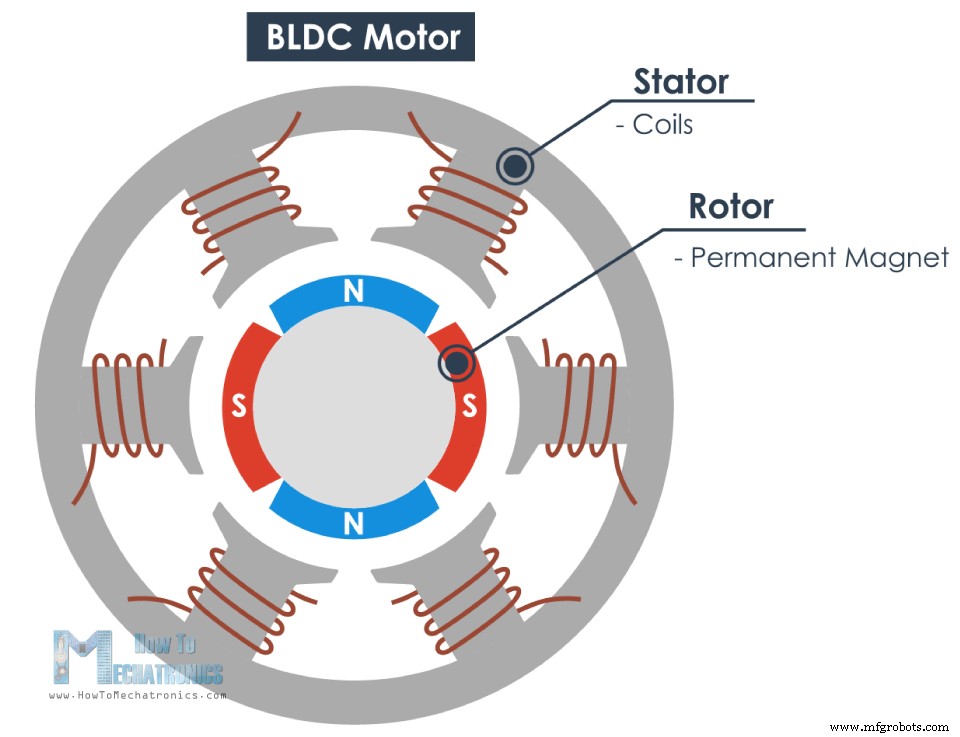
Un moteur BLDC se compose de deux parties principales, un stator et un rotor. Pour cette illustration, le rotor est un aimant permanent à deux pôles, tandis que le stator est constitué de bobines disposées comme indiqué sur l'image ci-dessous.
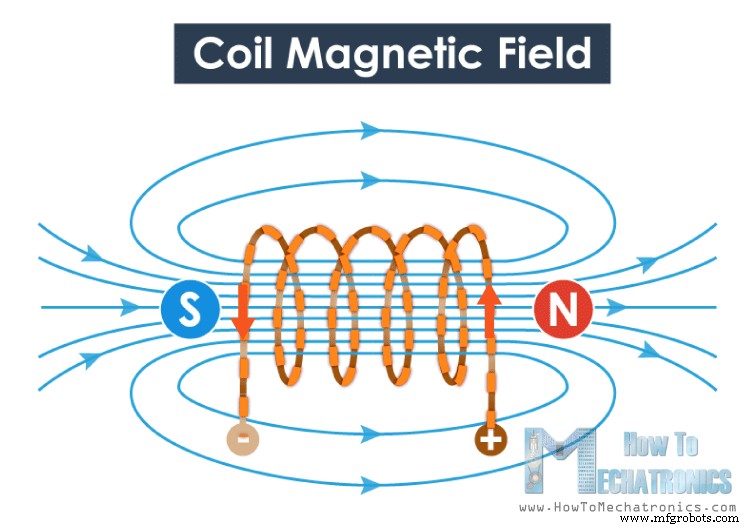
Nous savons tous que si nous appliquons un courant à travers une bobine, cela générera un champ magnétique et les lignes de champ magnétique ou les pôles dépendent de la direction du courant.
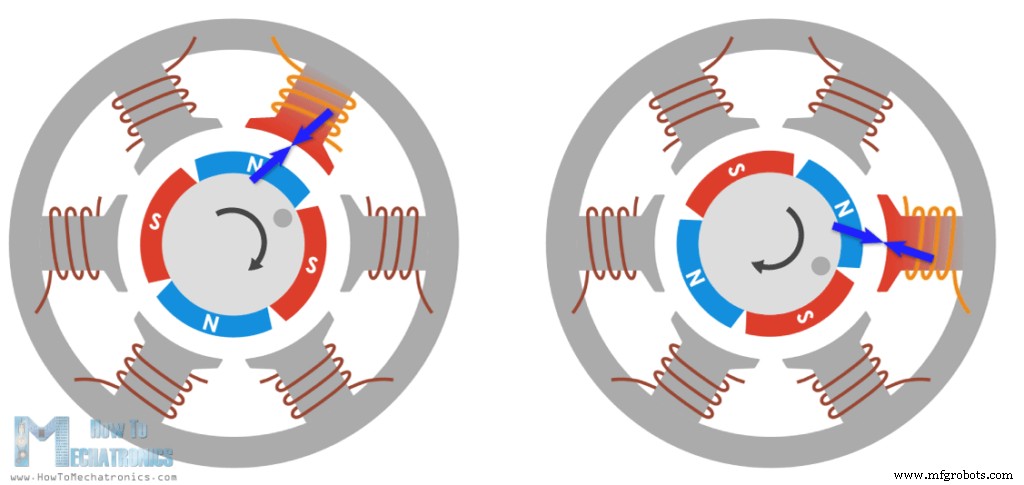
Donc si on applique le courant approprié, la bobine va générer un champ magnétique qui va attirer l'aimant permanent des rotors. Maintenant, si nous activons chaque bobine l'une après l'autre, le rotor continuera de tourner en raison de l'interaction de force entre le permanent et l'électroaimant.
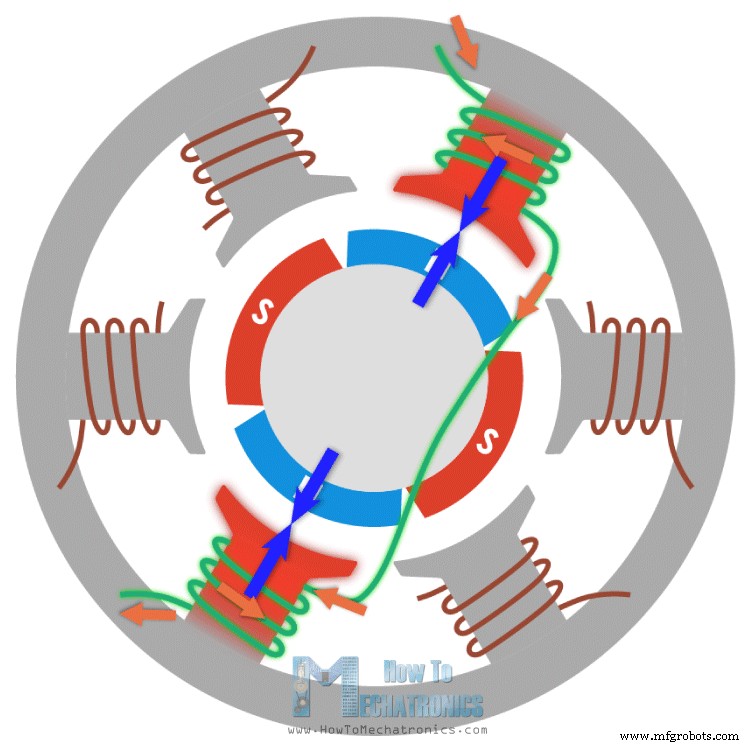
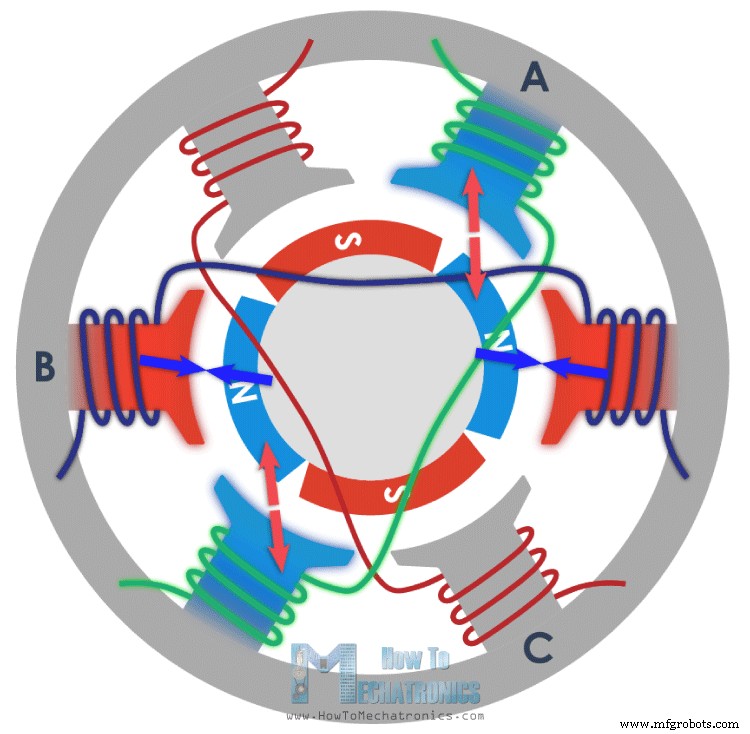
Afin d'augmenter l'efficacité du moteur, nous pouvons enrouler deux bobines opposées en une seule bobine de manière à générer des pôles opposés aux pôles des rotors, nous obtiendrons ainsi une force d'attraction double.
Avec cette configuration, nous pouvons générer les six pôles sur le stator avec seulement trois bobines ou phase. Nous pouvons encore augmenter l'efficacité en alimentant deux bobines en même temps. De cette façon, une bobine attirera et l'autre bobine repoussera le rotor.
Pour que le rotor effectue un cycle complet de 360 degrés, il a besoin de six étapes ou intervalles.
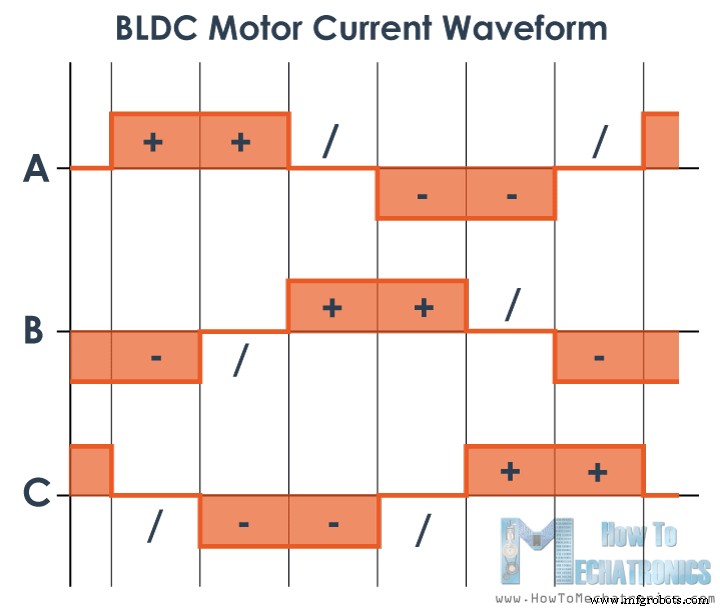
Si nous examinons la forme d'onde du courant, nous pouvons remarquer que dans chaque intervalle, il y a une phase avec un courant positif, une phase avec un courant négatif et la troisième phase est désactivée. Cela donne l'idée que nous pouvons connecter les extrémités libres de chacune des trois phases ensemble et ainsi nous pouvons partager le courant entre elles ou utiliser un seul courant pour alimenter les deux phases en même temps.
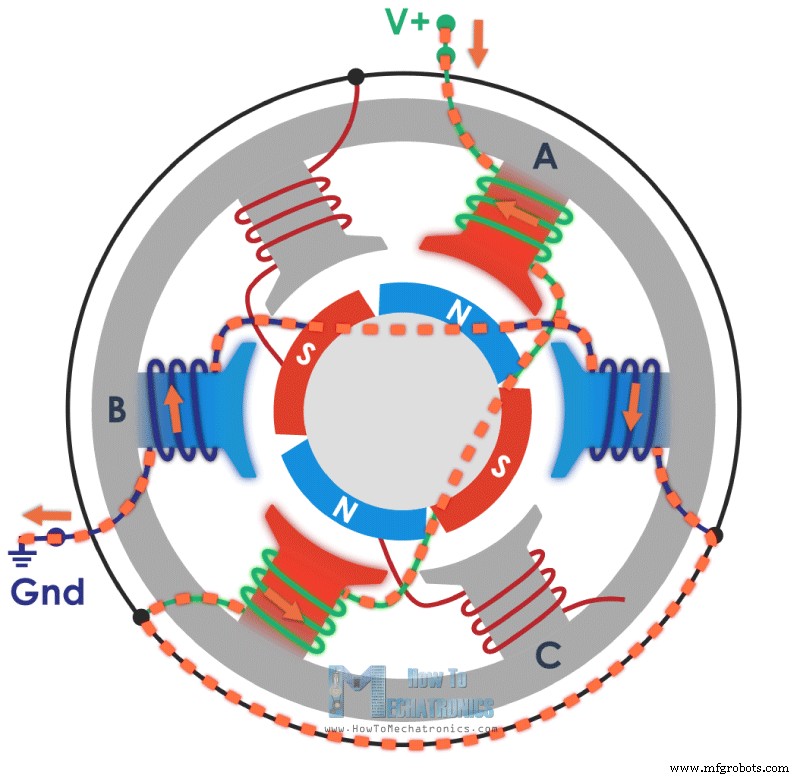
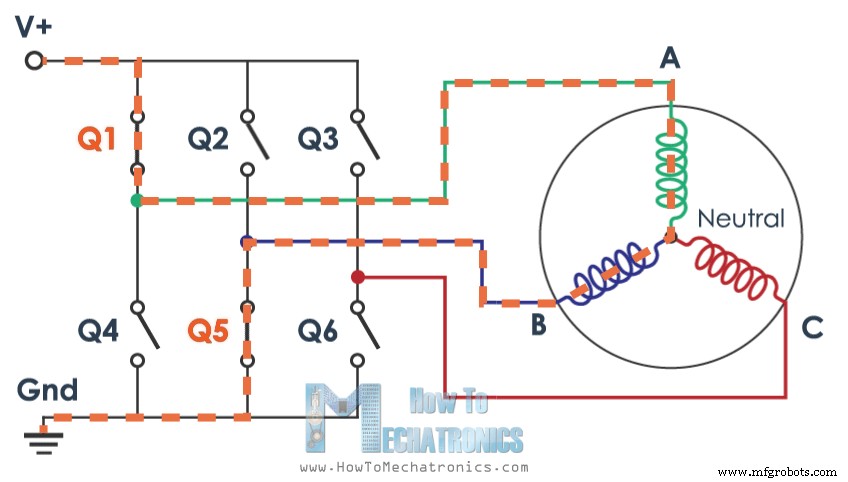
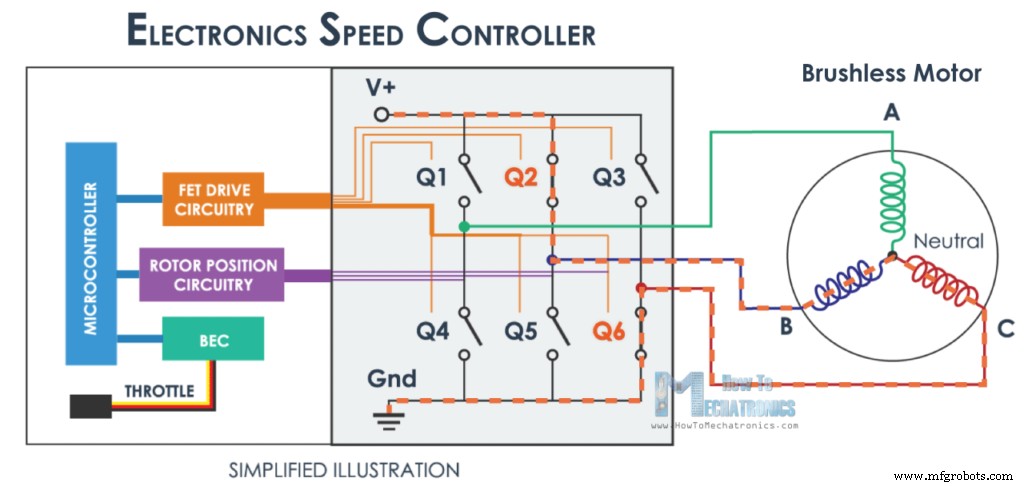
Voici un exemple. Si nous remontons la phase A High, ou la connectons à la tension continue positive, avec une sorte d'interrupteur, par exemple un MOSFET, et de l'autre côté, connectons la phase B à la terre, alors le courant circulera de VCC, à travers la phase A, le point neutre et la phase B, à la terre. Ainsi, avec un seul flux de courant, nous avons généré les quatre pôles différents qui font bouger le rotor.
Avec cette configuration, nous avons en fait une connexion en étoile des phases du moteur, où le point neutre est connecté en interne et les trois autres extrémités des phases sortent du moteur et c'est pourquoi le moteur sans balais a trois fils qui en sortent.
Ainsi, pour que le rotor effectue un cycle complet, il nous suffit d'activer les deux MOSFET corrects dans chacun des 6 intervalles et c'est à cela que servent les ESC.
Un ESC ou un contrôleur de vitesse électronique contrôle le mouvement ou la vitesse du moteur sans balai en activant les MOSFET appropriés pour créer le champ magnétique rotatif afin que le moteur tourne. Plus la fréquence est élevée ou plus l'ESC parcourt rapidement les 6 intervalles, plus la vitesse du moteur sera élevée.
Cependant, voici une question importante, et c'est comment savoir quand activer quelle phase. La réponse est que nous devons connaître la position du rotor et il existe deux méthodes courantes utilisées pour déterminer la position du rotor.
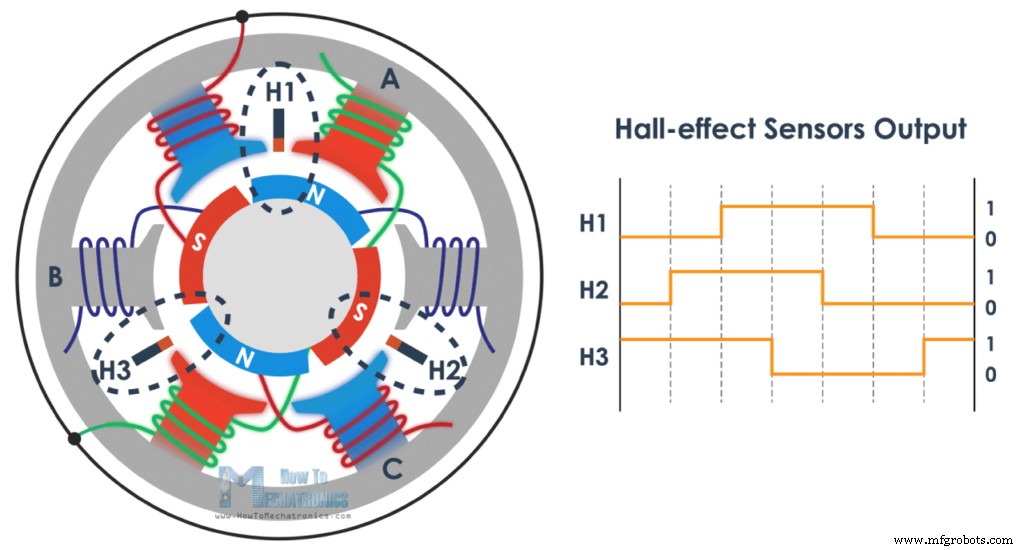
La première méthode courante consiste à utiliser des capteurs à effet Hall intégrés dans le stator, disposés également à 120 ou 60 degrés l'un de l'autre.
Lorsque les aimants permanents des rotors tournent, les capteurs à effet Hall détectent le champ magnétique et génèrent un « haut » logique pour un pôle magnétique ou un « bas » logique pour le pôle opposé. Selon ces informations, l'ESC sait quand activer la prochaine séquence ou intervalle de commutation.
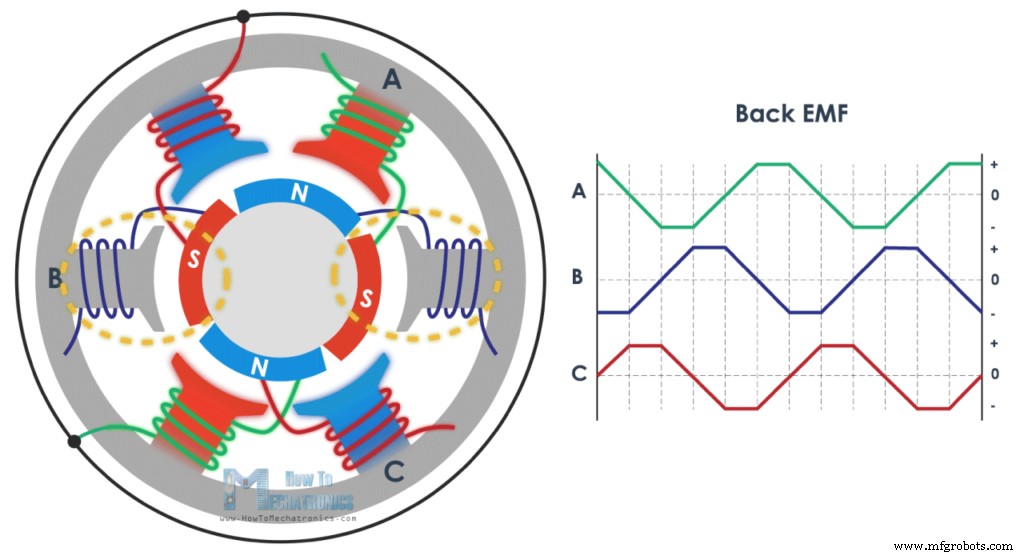
La deuxième méthode courante utilisée pour déterminer la position du rotor consiste à détecter la force contre-électromotrice ou contre-électromotrice. La force contre-électromotrice se produit à la suite du processus exactement opposé de génération d'un champ magnétique ou lorsqu'un champ magnétique mobile ou changeant traverse une bobine, il induit un courant dans la bobine.
Ainsi, lorsque le champ magnétique mobile du rotor traverse la bobine libre, ou celle qui n'est pas active, il induira un flux de courant dans la bobine et, par conséquent, une chute de tension se produira dans cette bobine. L'ESC capture ces chutes de tension au fur et à mesure qu'elles se produisent et, en fonction de celles-ci, il prédit ou calcule quand le prochain intervalle doit avoir lieu.
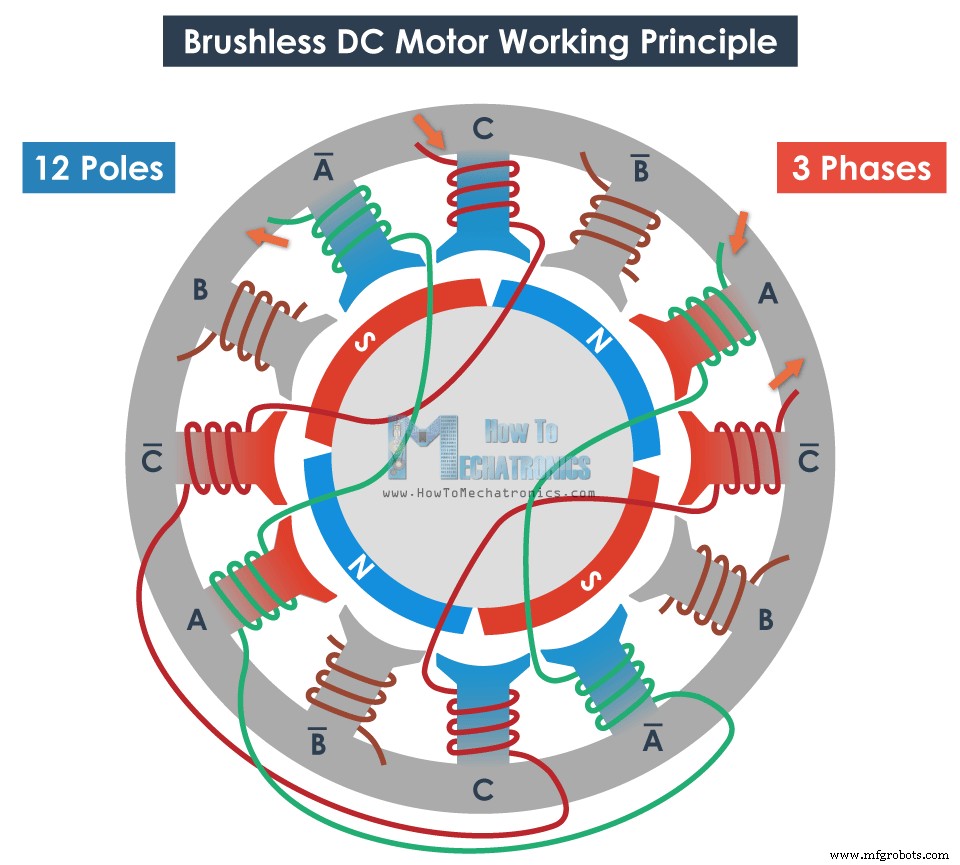
C'est donc le principe de fonctionnement de base des moteurs à courant continu et des ESC sans balais et c'est la même chose même si nous augmentons le nombre de pôles du rotor et du stator. Nous aurons toujours un moteur triphasé, seul le nombre d'intervalles augmentera afin de réaliser un cycle complet.
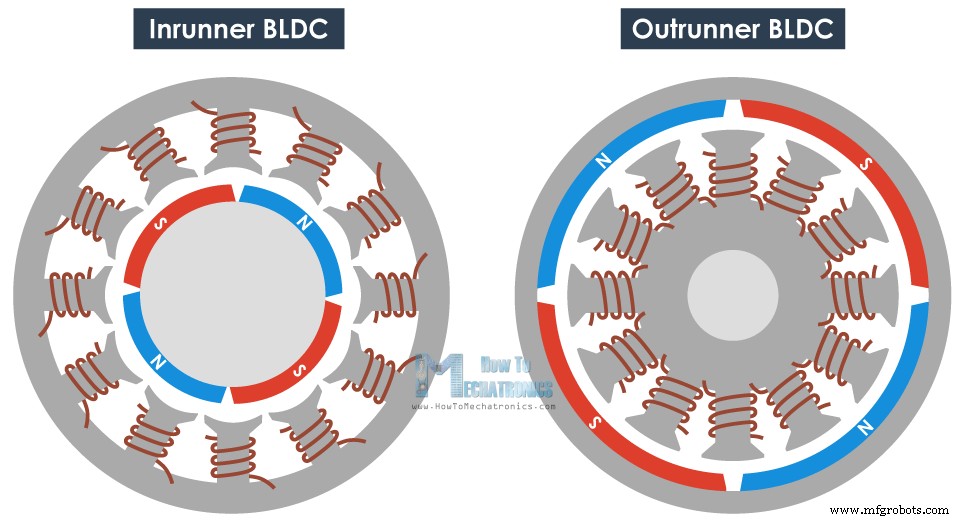
Ici, nous pouvons également mentionner que les moteurs BLDC peuvent être des inrunners ou des outrunners. Un moteur brushless inrunner a les aimants permanents à l'intérieur des électroaimants, et vice versa, un moteur outrunner a les aimants permanents à l'extérieur des électroaimants. Encore une fois, ils utilisent le même principe de fonctionnement et chacun d'eux a ses propres forces ou faiblesses.
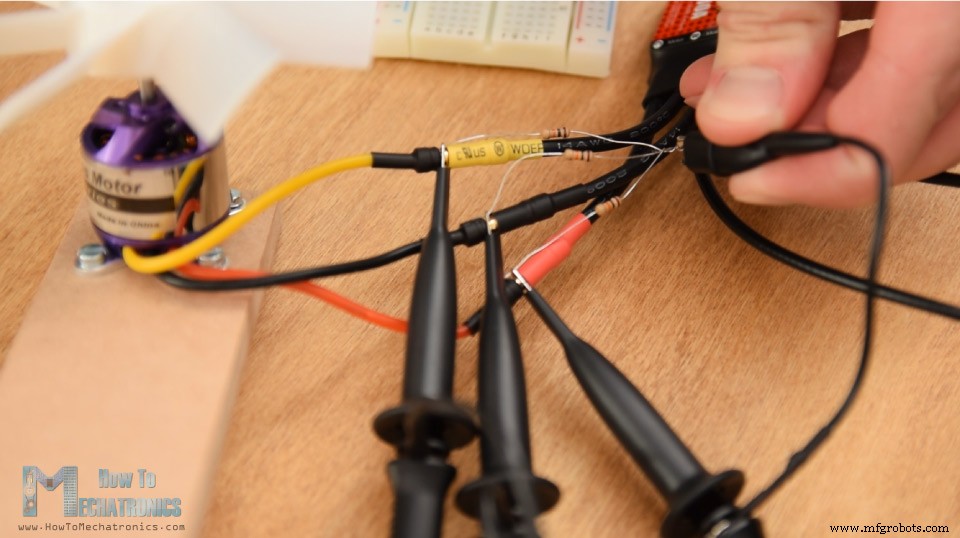
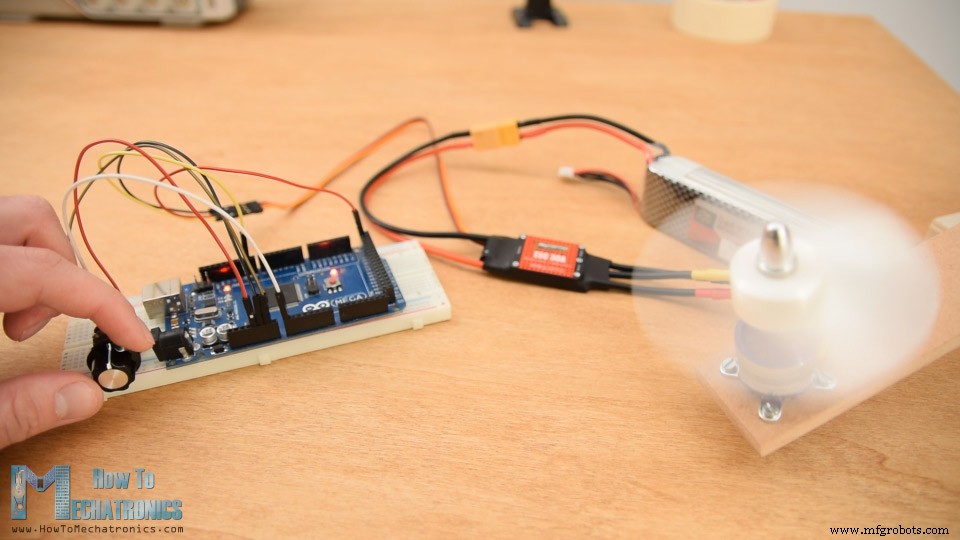
Ok, c'est assez de théorie alors maintenant démontrons et voyons dans la vraie vie ce que nous avons expliqué ci-dessus. Pour cela nous allons connecter les trois phases d'un moteur brushless à un oscilloscope. J'ai connecté 3 résistances en un seul point pour faire un point neutre virtuel et de l'autre côté je les ai connectées aux trois phases du moteur BLDC.
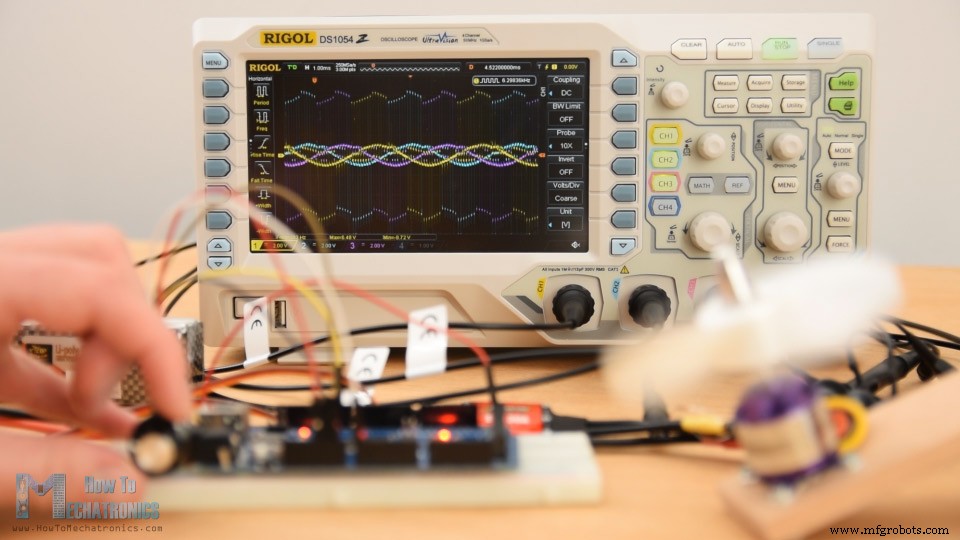
La première chose que nous pouvons remarquer ici, ce sont les trois ondes sinusoïdales. Ces ondes sinusoïdales sont en fait l'EFM arrière généré dans les phases lorsqu'elles ne sont pas actives.
Nous pouvons voir que lorsque nous changeons le RPM du moteur, la fréquence des ondes sinusoïdales change ainsi que leur amplitude. Plus le RPM est élevé, plus la fréquence et l'amplitude des ondes sinusoïdales de la force contre-électromotrice sont élevées. Cependant, ce qui entraîne le moteur, ce sont en fait ces pics, qui sont les phases actives qui génèrent le champ magnétique changeant.
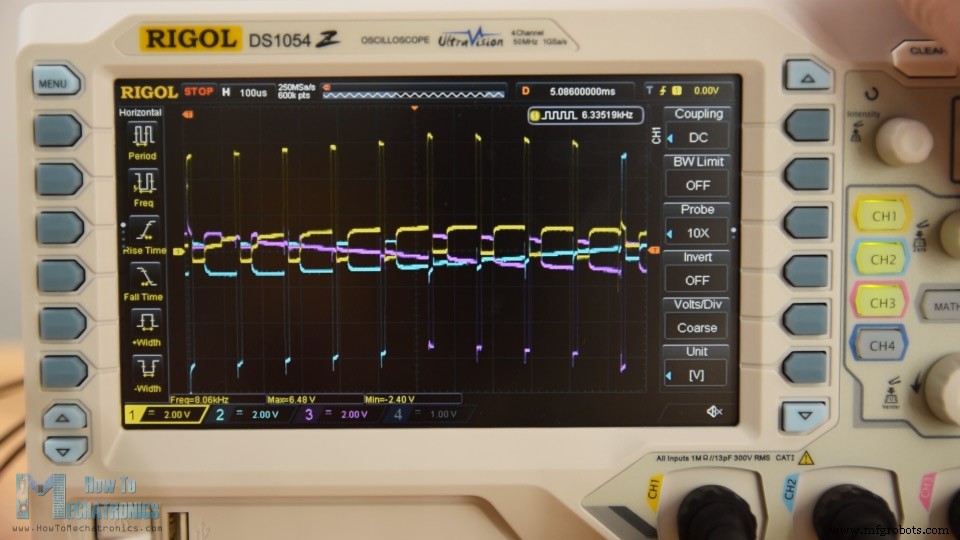
On peut remarquer qu'à chaque intervalle, il y a deux phases actives et une inactive. Par exemple, nous avons ici les phases A et B actives, tandis que la phase C est inactive. Ensuite, nous avons les phases A et C actives, tandis que la phase B est inactive, et ainsi de suite.
Ici, je voudrais remercier Banggood.com de m'avoir fourni cet oscilloscope. C'est le Rigol DS1054Z et c'est l'un des meilleurs oscilloscopes d'entrée de gamme pour son prix. Il dispose de quatre canaux d'entrée, d'une bande passante de 50 MHz, qui peut être piratée jusqu'à 100 MHz, d'un taux d'échantillonnage de 1 GSa/s et d'une profondeur de mémoire relativement importante de 24 Mpts.
L'écran est de 7 pouces et il est vraiment agréable et lumineux. Il comporte diverses fonctions mathématiques, des filtres passe-bas et passe-haut, un décodage SPI et I2C et bien plus encore. Encore une fois, un grand merci à Banggood.com et assurez-vous de vérifier cet oscilloscope dans leur magasin.
Néanmoins, c'est le principe de fonctionnement de base du moteur sans balais. Si vous voulez d'autres exemples réels et apprendre à contrôler les moteurs sans balais à l'aide d'Arduino, vous devriez consulter la deuxième partie de ce didacticiel.
J'espère que vous avez apprécié ce tutoriel et appris quelque chose de nouveau. N'hésitez pas à poser des questions dans la section des commentaires ci-dessous et n'oubliez pas de consulter ma collection de projets Arduino.Comment ça marche
Comment fonctionne un ESC (contrôleur de vitesse électronique)

Technologie industrielle
- Une introduction aux serrures à came et à leur fonctionnement
- Une introduction aux vis à œil et à leur fonctionnement
- Une introduction aux œillets et à leur fonctionnement
- Qu'est-ce que le moulage par transfert et comment fonctionne-t-il ?
- Qu'est-ce qu'une transmission et comment fonctionne-t-elle ?
- Comment fonctionne un moteur à courant continu brossé
- Qu'est-ce que l'impression 3D ? - Types et comment ça marche
- Qu'est-ce que le soudage à l'arc ? - Types et comment ça marche
- Qu'est-ce qu'une aléseuse CNC et comment fonctionne-t-elle ?