


Introduction à la communication numérique
Dans la conception de systèmes numériques volumineux et complexes, il est souvent nécessaire qu'un appareil communique des informations numériques vers et depuis d'autres appareils. L'un des avantages des informations numériques est qu'elles ont tendance à être beaucoup plus résistantes aux erreurs transmises et interprétées que les informations symbolisées sur un support analogique.
Cela explique la clarté des connexions téléphoniques codées numériquement, des disques audio compacts et une grande partie de l'enthousiasme de la communauté des ingénieurs pour la technologie des communications numériques. Cependant, la communication numérique a ses propres pièges uniques, et il existe une multitude de manières différentes et incompatibles par lesquelles elle peut être envoyée.
Espérons que ce chapitre vous éclairera sur les bases de la communication numérique, ses avantages, ses inconvénients et ses considérations pratiques.
Supposons que l'on nous confie la tâche de surveiller à distance le niveau d'un réservoir de stockage d'eau. Notre travail consiste à concevoir un système pour mesurer le niveau d'eau dans le réservoir et envoyer cette information à un endroit éloigné afin que d'autres personnes puissent le surveiller.
La mesure du niveau du réservoir est assez simple et peut être effectuée avec différents types d'instruments, tels que des interrupteurs à flotteur, des transmetteurs de pression, des détecteurs de niveau à ultrasons, des sondes capacitives, des jauges de contrainte ou des détecteurs de niveau radar.
Exemple de communication analogique
Pour les besoins de cette illustration, nous utiliserons un appareil de mesure de niveau analogique avec un signal de sortie de 4-20 mA. 4 mA représentent un niveau de réservoir de 0 %, 20 mA représentent un niveau de réservoir de 100 % et tout ce qui est compris entre 4 et 20 mA représente un niveau de réservoir proportionnellement compris entre 0 % et 100 %.
Si nous le voulions, nous pourrions simplement envoyer ce signal de courant analogique de 4 à 20 milliampères à l'emplacement de surveillance à distance au moyen d'une paire de fils de cuivre, où il conduirait un indicateur de panneau quelconque, dont l'échelle était calibrée pour refléter la profondeur de l'eau dans le réservoir, quelle que soit l'unité de mesure préférée.
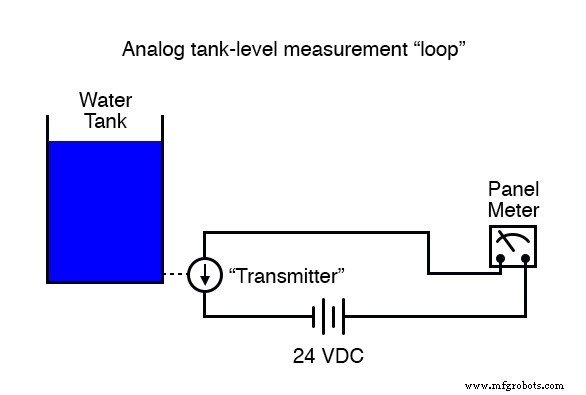
Ce système de communication analogique serait simple et robuste. Pour de nombreuses applications, il suffirait parfaitement à nos besoins. Mais, ce n'est pas le unique moyen de faire le travail.
Dans le but d'explorer les techniques numériques, nous explorerons d'autres méthodes de surveillance de ce réservoir hypothétique, même si la méthode analogique qui vient d'être décrite pourrait être la plus pratique.
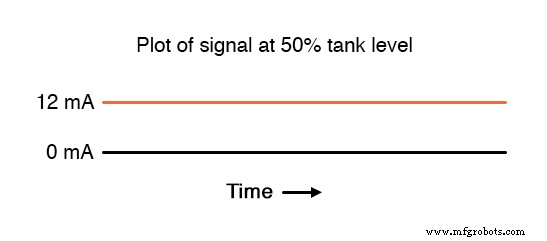
Le système analogique, aussi simple soit-il, a ses limites. L'un d'eux est le problème des interférences de signaux analogiques. Étant donné que le niveau d'eau du réservoir est symbolisé par l'amplitude du courant continu dans le circuit, tout « bruit » dans ce signal sera interprété comme un changement du niveau d'eau.
Sans bruit, un tracé du signal actuel au fil du temps pour un niveau de réservoir constant de 50 % ressemblerait à ceci :
Si les fils de ce circuit sont disposés trop près des fils transportant du courant alternatif à 60 Hz, par exemple, un couplage inductif et capacitif peut créer un faux signal de « bruit » à introduire dans ce circuit autrement continu.
Bien que la faible impédance d'une boucle 4-20 mA (250 Ω, généralement) signifie que les petites tensions de bruit sont considérablement chargées (et donc atténuées par l'inefficacité du couplage capacitif/inductif formé par les fils d'alimentation), un tel bruit peut être important suffisamment pour causer des problèmes de mesure :
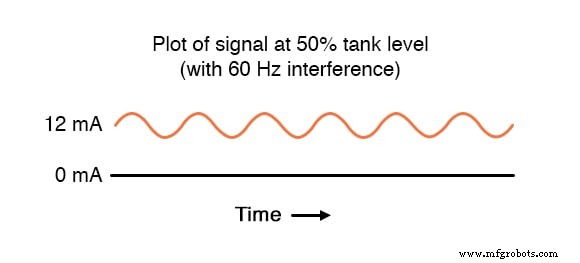
L'exemple ci-dessus est un peu exagéré, mais le concept doit être clair :tout le bruit électrique introduit dans un système de mesure analogique sera interprété comme des changements dans la quantité mesurée.
Une façon de lutter contre ce problème est de symboliser le niveau d'eau du réservoir au moyen d'un signal numérique au lieu d'un signal analogique. Nous pouvons le faire très grossièrement en remplaçant le dispositif émetteur analogique par un ensemble de commutateurs de niveau d'eau montés à différentes hauteurs sur le réservoir :
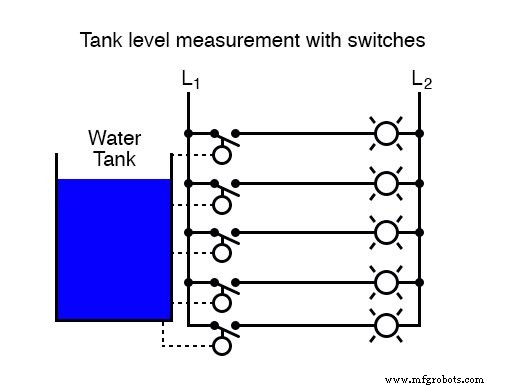
Chacun de ces commutateurs est câblé pour fermer un circuit, envoyant du courant à des lampes individuelles montées sur un panneau à l'emplacement de surveillance. Lorsque chaque interrupteur se fermait, sa lampe respective s'allumait et quiconque regardait le panneau verrait une représentation à 5 lampes du niveau du réservoir.
Étant donné que chaque circuit de lampe est de nature numérique, soit à 100 % on ou 100 % de de réduction —les interférences électriques provenant d'autres fils le long du parcours ont beaucoup moins d'effet sur la précision de la mesure à l'extrémité de la surveillance que dans le cas du signal analogique.
Un énorme la quantité d'interférence serait nécessaire pour qu'un signal « off » soit interprété comme un signal « on » ou vice versa. La résistance relative aux interférences électriques est un avantage dont bénéficient toutes les formes de communication numérique par rapport à l'analogique.
Maintenant que nous savons que les signaux numériques sont beaucoup plus résistants aux erreurs induites par le "bruit", améliorons ce système de mesure de niveau de réservoir. Par exemple, nous pourrions augmenter la résolution de ce système de jaugeage de réservoir en ajoutant plus de commutateurs, pour une détermination plus précise du niveau d'eau.
Supposons que nous installions 16 interrupteurs le long de la hauteur du réservoir au lieu de cinq. Cela améliorerait considérablement notre résolution de mesure, mais au prix d'une augmentation considérable de la quantité de fils devant être enfilés entre le réservoir et le lieu de surveillance.
Une façon de réduire cette dépense de câblage serait d'utiliser un encodeur prioritaire pour prendre les 16 commutateurs et générer un nombre binaire qui représente la même information :
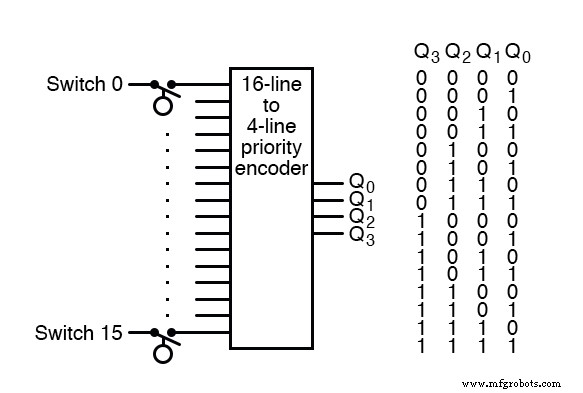
Désormais, seuls 4 fils (plus les fils de terre et d'alimentation nécessaires) sont nécessaires pour communiquer les informations, contre 16 fils (plus les fils de terre et d'alimentation). À l'emplacement de surveillance, nous aurions besoin d'une sorte de dispositif d'affichage qui pourrait accepter les données binaires à 4 bits et générer un affichage facile à lire pour une personne à voir.
Un décodeur, câblé pour accepter les données 4 bits comme entrée et allumer les lampes de sortie 1 sur 16, pourrait être utilisé pour cette tâche, ou nous pourrions utiliser un circuit décodeur/pilote 4 bits pour piloter une sorte de chiffre numérique afficher.
Néanmoins, une résolution de 1/16 de hauteur de réservoir peut ne pas être suffisante pour notre application. Pour mieux résoudre le niveau d'eau, nous avons besoin de plus de bits dans notre sortie binaire. Nous pourrions ajouter encore plus de commutateurs, mais cela devient rapidement peu pratique.
Une meilleure option serait de rattacher notre émetteur analogique d'origine au réservoir et de convertir électroniquement sa sortie analogique de 4 à 20 milliampères en un nombre binaire avec beaucoup plus de bits qu'il ne serait pratique d'utiliser un ensemble de commutateurs de niveau discrets.
Étant donné que le bruit électrique que nous essayons d'éviter est rencontré le long du long fil allant du réservoir à l'emplacement de surveillance, cette conversion A/N peut avoir lieu au niveau du réservoir (où nous avons un signal 4-20 mA « propre » ). Il existe une variété de méthodes pour convertir un signal analogique en numérique, mais nous allons sauter une discussion approfondie de ces techniques et nous concentrer sur la communication du signal numérique elle-même.
Le type d'informations numériques envoyées de notre instrumentation de réservoir à l'instrumentation de surveillance est appelé parallèle données numériques. C'est-à-dire que chaque bit binaire est envoyé sur son propre fil dédié, de sorte que tous les bits arrivent à leur destination simultanément.
Ceci nécessite évidemment l'utilisation d'au moins un fil par bit pour communiquer avec le lieu de surveillance. Nous pourrions encore réduire nos besoins de câblage en envoyant les données binaires sur un seul canal (un fil + terre), de sorte que chaque bit soit communiqué un à la fois. Ce type d'informations est appelé série données numériques.
Nous pourrions utiliser un multiplexeur ou un registre à décalage pour prendre les données parallèles du convertisseur A/N (au niveau de l'émetteur du réservoir) et les convertir en données série. À l'extrémité de réception (l'emplacement de surveillance), nous pourrions utiliser un démultiplexeur ou un autre registre à décalage pour convertir à nouveau les données série en parallèle pour les utiliser dans les circuits d'affichage.
Les détails exacts de la façon dont les paires de registres mux/demux ou à décalage sont maintenus en synchronisation sont, comme la conversion A/N, un sujet pour une autre leçon. Heureusement, il existe des puces à circuits intégrés numériques appelées UART (Universal Asynchronous Receiver-Transmitters) qui gèrent tous ces détails par elles-mêmes et simplifient grandement la vie du concepteur.
Pour l'instant, nous devons continuer à concentrer notre attention sur le problème actuel :comment communiquer les informations numériques du réservoir au lieu de surveillance.
FEUILLES DE TRAVAIL CONNEXES :
-
Feuille de travail sur la communication numérique
Technologie industrielle
- Introduction aux circuits CC
- Introduction aux circuits CA
- Introduction aux circuits à semi-conducteurs discrets
- Introduction aux circuits intégrés analogiques
- Introduction à SPICE
- Introduction à l'algèbre booléenne
- Introduction à Karnaugh Mapping
- Considérations pratiques - Communication numérique
- Pourquoi le numérique ?