


Les champions de l'automatisation luttent contre un problème d'intégration spectaculaire aux États-Unis
Les projets visent à établir un pont de communication entre les robots et d'autres composants d'usine
Comme les délégués internationaux des Nations Unies qui utilisent des interprètes pour se comprendre, les robots, machines et autres composants industriels de divers fournisseurs parlent différents langages informatiques et ont besoin de traducteurs pour les aider à communiquer.
En grande partie pour des raisons économiques, les entreprises fabriquant des machines-outils, des robots, des convoyeurs et autres utilisent des logiciels propriétaires pour leur fonctionnement et leur communication entre elles et avec des composants tels que des capteurs, des pilotes et des API. Les fabricants de machines veulent que les services d'achat des usines restent fidèles à leur marque de solution globale pour générer plus de revenus.
"La pensée dominante à un moment donné était que si je vais investir mes fonds et fournir des solutions, je veux protéger mes ventes", a déclaré Matthew Robinson, responsable de programme, ROS-Industrial (ROS-I) Consortium Americas, Southwest Research Institut. "Si je fournis des machines-outils, j'aimerais que les clients utilisent tous mes produits... mes logiciels, mon matériel et les technologies interconnectées qui leur sont associées."
Lorsqu'un propriétaire d'usine décide de changer de marque, des problèmes de communication surviennent et entravent l'intégration, la simulation et l'analyse susceptibles d'augmenter la production et la qualité.
Jusqu'à présent, la tâche de permettre la communication entre toutes les technologies d'une usine incombait en grande partie aux intégrateurs de systèmes qui créent les traducteurs de code informatique, ou les ponts, disons, d'une caméra 3D à un robot ou entre deux robots fabriqués par différents fournisseurs. . C'est un processus qui prend beaucoup de temps et qui coûte très cher, à tel point que le prix de la connectivité technique peut dépasser celui d'une machine elle-même.
"L'ingénierie prend tellement de temps et coûte tellement cher que de nombreuses entreprises n'opteront pas pour l'automatisation", a déclaré Juan Aparicio, responsable du groupe de recherche pour l'automatisation de la fabrication avancée chez Siemens Technology. "Cela n'a pas de sens pour eux car ils n'ont pas un gros budget qui peut justifier l'automatisation."
Évolution vers une norme commune
Ce scénario a conduit à un problème à grande échelle :le temps et les dépenses associés à l'intégration entravent l'adoption de l'automatisation dans de nombreux ateliers et entravent les progrès de l'industrie américaine.
Ce que les fabricants, et leurs résolveurs de problèmes d'intégration pleins d'espoir comme Robinson, Aparicio et d'autres, vivent maintenant a un précédent dans un autre domaine de fabrication.
Il y a environ 30 ans, dans l'industrie des semi-conducteurs, les équipements de traitement des tranches, tels que les machines de gravure et de lithographie de différents fournisseurs, ne pouvaient pas non plus communiquer entre eux. Pour lutter contre l'atrophie imminente dans ce cas, les fabricants de semi-conducteurs ont formé un consortium et ont dit aux fournisseurs qu'ils devaient créer une norme commune. C'est exactement ce qui s'est passé.
"La question est la suivante :"La demande des clients est-elle suffisamment puissante pour conduire à la création d'une norme commune [maintenant] ?" C'est selon John Wen, responsable de l'ingénierie électrique, informatique et des systèmes à l'Institut polytechnique de Rensselaer. "Cela reste à voir, mais il semble y avoir un mouvement dans cette direction."
Wen fait également partie de ceux qui travaillent actuellement sur les points communs et créent des ponts qui traduisent les langages machine afin que les appareils d'une usine puissent communiquer entre eux.
Leur travail est financé par l'Institut Advanced Robotics for Manufacturing (ARM), qui fait partie de Manufacturing USA. Les projets financés par l'Institut ARM comprennent le développement d'intergiciels spécifiques - un du milieu universitaire et un autre de l'entrepreneur aux poches profondes Scott Hassan - à un niveau de préparation technique plus élevé afin que les options d'intergiciel soient prêtes pour une utilisation industrielle générale et puissent aider les usines à bourdonner avec une communication exploitable .
Une solution plug-and-play
Wen dirige un projet intitulé "Robot Raconteur (RR):An interoperable middleware for robotics". RR collecte des données et invoque également des fonctions, telles que l'utilisation d'une caméra.
"Robot Raconteur... est une technologie middleware avancée, augmentée et orientée objet spécialement conçue pour fournir de véritables capacités d'interopérabilité plug-and-play pour les systèmes d'automatisation/robotique", selon la proposition de recherche de Wen.
RR est déjà polyvalent :il est compatible avec les systèmes d'exploitation Linux, Windows, OSX, iOS, Android, OpenBSD, QNX, Arduino et xPC Target. Il dispose de bibliothèques pour C++, Python, C#, Java, MATLAB, LabView, navigateur JavaScript et xPC Target.
Le middleware Raconteur a été développé dans le laboratoire Rensselaer de Wen par John Wason. Après avoir obtenu son doctorat, Wason a créé sa propre entreprise, Wason Technology, axée sur le middleware. Wason participe à la recherche financée par l'ARM Institute avec Rensselaer, tout comme le Southwest Research Institute et United Technology Corp.
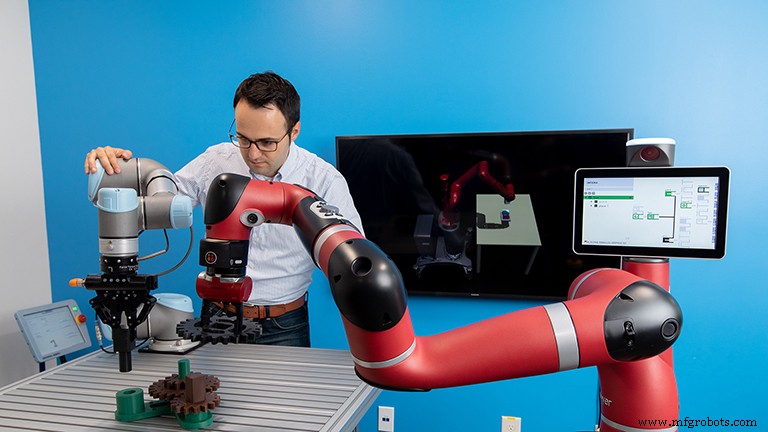
En attendant, les utilisateurs de robots industriels s'appuient toujours sur un processus d'apprentissage et de répétition pour les mettre au travail.
La clé pour s'éloigner du paradigme de l'apprentissage et de la répétition est d'utiliser des capteurs, que ce soit pour la vision, la 3D, le balayage laser, la proximité, la tactilité ou la force, a déclaré Wen.
Cependant, intégrer et programmer des capteurs dans un robot ajoute de la complexité :ils représentent un coût supplémentaire. Et les capteurs peuvent casser. Plus il y a de choses qui peuvent casser, plus la probabilité qu'une ligne tombe en panne est élevée, ce qui coûtera de l'argent à l'usine.
La solution de Wen consiste à développer RR en un système plug-and-play open source qui rendrait la programmation et l'intégration de robots, de capteurs, de périphériques et de logiciels de simulation de plusieurs fournisseurs et plates-formes faciles, rapides et sécurisées.
Cela ouvrirait également la porte à l'utilisation d'un plus large éventail de capteurs, y compris des produits grand public à moindre coût, tels que les caméras Azure Kinect et Intel RealSense 3D, a déclaré Wen.
‘Programme dans la langue de votre choix’
Inhérent au travail de Robinson au Southwest Research Institute est de travailler avec et de promouvoir ROS-I, un autre middleware open source similaire à RR dans le sens où vous pouvez connecter divers ensembles d'appareils, mais qui facilite également la visualisation et la simulation.
Il sait que le paradigme cloisonné d'un fournisseur promouvant une et une seule solution est ce qui a causé des problèmes de fabrication dans le domaine de la connectivité.
Ainsi, Robinson a pesé le pour et le contre et est franc sur le côté négatif de sa fondation, ROS (Robot Operating System), dans le domaine spécifique de l'IoT.
"L'un des gros inconvénients de ROS est qu'il contient beaucoup de C++, qui est un langage informatique en évolution rapide et mis à jour", a-t-il déclaré. « Cela peut être, pour les nouveaux arrivants, intimidant et semé d'embûches. Il existe donc de nombreuses entités et outils pour protéger les professionnels de l'industrie qui souhaitent simplement que leurs systèmes fonctionnent de toutes sortes d'écritures approfondies et approfondies de logiciels informatiques en C++.
"RR cherche à réduire cette barrière à l'entrée."
Aparicio est un autre partisan de la diversité des langages informatiques.
"Je pense qu'il est irréaliste de dire qu'il n'y aura qu'un seul langage dans la fabrication, mais s'il y en a plusieurs - tous avec des avantages et des inconvénients - alors nous avons besoin d'une passerelle" sous la forme d'un logiciel qui agit comme un interprète, a-t-il déclaré.
Aparicio est chercheur principal pour un projet financé par l'Institut ARM visant à créer un logiciel open source plug-and-play pour l'interopérabilité et la communication entre les systèmes d'automatisation, les simulateurs, les plates-formes cloud et un robot (qui est contrôlé par ROS-I).
La passerelle fonctionnera avec trois normes et protocoles largement utilisés dans la fabrication :OPC-UA, MTConnect et DDS.
Rejoindre Siemens et le Southwest Research Institute sur le projet sont la société de logiciels Real Time Innovations et les fournisseurs de robots Keba et Yaskawa.
"À la fin, la sauce secrète sera la facilité avec laquelle vous permettez à toutes ces machines de se parler... d'interopérer... d'abstraire toutes ces communications de bas niveau afin que vous puissiez programmer dans la langue de votre choix", a déclaré Aparicio.
Les anciennes machines peuvent-elles également parler ?
Les nouvelles machines-outils et dispositifs d'usine sont prêts à l'emploi pour assurer la connectivité et l'interopérabilité, et leurs propriétaires devraient pouvoir tirer pleinement parti du travail effectué par Aparicio, Wen et Robinson.
Mais qu'en est-il des anciennes machines ?
"En général, s'il dispose d'une carte réseau, s'il peut prendre en charge le transfert d'informations sur Internet traditionnel, nous sommes prêts à partir", a déclaré Robinson.
Même certains robots hérités qui ont une dizaine d'années peuvent être mis au travail au lieu de ramasser la poussière dans un entrepôt d'usine.
"Si vous avez un robot de 10 ans, c'est essentiellement un atout gratuit à ce stade, donc vous ajoutez simplement quelques capteurs, en tirant parti de certains logiciels", a déclaré Robinson. "Vous devrez peut-être travailler avec un partenaire contractuel, sauf si vous disposez d'une bonne équipe interne, mais vous pouvez être opérationnel [à un] bien moindre [coût] que d'acheter un tout nouveau système à partir de zéro.
"Ce retour sur investissement devient très convaincant."
Le travail d'un codeur n'est jamais terminé
Même avec toute l'expertise et le travail acharné investis dans les projets financés par l'ARM Institute, ainsi que leurs résultats positifs, il reste encore beaucoup de travail à faire pour aider l'industrie manufacturière américaine à atteindre son plein potentiel d'interopérabilité et de connectivité.
Il y a aussi de la place pour plus de participants.
« C'est le genre de projet que plus il y a de gens qui le connaissent, mieux c'est. Nous voulons embarquer de plus en plus d'entreprises », a déclaré Aparicio. "Ce n'est pas que nous résolvons totalement le problème. Nous résolvons un petit barrage routier. Il y aura d'autres projets "nécessaires pour résoudre le problème plus large.
Comme Wen l'a dit à propos des résultats des projets :"Tout le monde le veut."
Qu'est-ce que ROS ?
Certains des projets de développement technologique financés par l'Institut Advanced Robotics for Manufacturing (ARM) exploitent une grande partie du contenu du logiciel ROS-Industrial pour étendre ses capacités et idéalement renforcer les modules développés pour une utilisation industrielle générale.

L'histoire de ROS, le code logiciel fondamental de ROS-Industrial, est enracinée dans la Silicon Valley.
Le code ROS a été développé par une équipe travaillant chez Willow Garage dirigée par le fondateur de la société Scott Hassan, un milliardaire de la Silicon Valley qui était l'architecte logiciel clé de Google, selon une biographie publiée sur le site Web de sa société suivante, Adapter Technologies. ROS, et maintenant ROS2, est actuellement développé et maintenu par l'association à but non lucratif Open Robotics.
Le nom couramment utilisé, ROS, est un acronyme pour "système d'exploitation de robot", mais qui vend ses capacités à découvert.
« ROS n'est pas un système d'exploitation au sens traditionnel de la gestion et de la planification des processus ; il fournit plutôt une couche de communication structurée au-dessus des systèmes d'exploitation hôtes… », selon un aperçu de ROS sur le site Web de Willow Garage.
Système de contrôle d'automatisation
- Plus d'automatisation =plus de robots capables
- Automatisation :Cobot compact et léger
- Bilsing Automation se déplace et s'étend
- Automatisation :Cobot ajoute une interface pour une intégration plus facile avec les machines de moulage par injection
- Hitachi finalise l'acquisition de JR Automation
- Équipement d'automatisation du soudage
- Rockwell Automation et Comau s'associent pour « simplifier l'intégration des robots pour les fabricants »
- De l'interface utilisateur à l'IA :un parcours d'automatisation
- Tendances de l'automatisation industrielle