


Blog invité — Charles Guan se prépare (et baisse) avec Markforged
Ce blog invité est écrit par Charles Guan, diplômé en génie mécanique du MIT et ancien instructeur de conception et d'atelier d'usinage au MIT. Il est également le constructeur du robot Overhaul sur les BattleBots d'ABC, diffusé cet été les jeudis à 20h, heure de l'Est et 19h au centre. Il travaille comme consultant en ingénierie en robotique et en transport, et est parrainé par Markforged pour participer aux BattleBots. Consultez son site Web et Equals Zero Robotics.
Quelques antécédents de robots de combat

Dans le monde des combats de robots, il y a quelques conceptions de base que vous avez tendance à voir tout le temps - il y a vos cales, palmes, marteaux, rotors en rotation, etc. À l'instar des Pokémon légendaires, certaines conceptions sont des « Saint-Graal », rarement vues et encore plus rarement bien exécutées dans l'arène. Le « flywheel flipper » en fait partie. En règle générale, vos bras de retournement à grande vitesse, qui sont ceux que l'on voit projeter des adversaires à plusieurs pieds dans les airs, sont pneumatiques. Mais la pneumatique, bien que dense en puissance, n'est pas dense en énergie, et même les meilleures palmes obtiennent moins d'une douzaine de bons coups avant de manquer littéralement d'essence. Le batteur électrique à volant d'inertie associe la densité énergétique élevée des batteries à la disponibilité élevée de l'énergie cinétique d'un volant d'inertie.
Canaliser cette énergie dans une forme rapidement libérable, mais contrôlable, a été insaisissable. Les défis de conception incluent un mécanisme d'engagement fiable, un calendrier cohérent, une accélération progressive et un lien solide avec l'extrémité commerciale. Si vous gâchez l'un d'entre eux, vous auriez tout aussi bien pu fabriquer une grenade à énergie cinétique.
Seuls quelques exemples dans toute l'histoire des combats de robots ont été réalisés. Sur le petit bout, il y a la série de robots de classe de 3 à 30 livres de Zac O'Donnell, y compris son bot Magneato, et les conceptions relativement réussies de Dale Heatherington. Pour les gros robots, Warrior a été la référence.

Si vous le remarquez, chacun de ces robots utilise une approche de conception et un mécanisme final différents. Cela illustre le niveau d'exploration que la conception a eu dans la communauté; les conceptions de robots ont tendance à se ressembler à mesure qu'une solution optimale au niveau local est trouvée par les constructeurs.
Depuis quelques années maintenant, je cherchais une solution compacte et coaxiale au problème qui puisse être montée en ligne avec un "volant pointu" - un tambour ou un disque en rotation avec des dents - et connectée à un mécanisme de l'autre côté de le robot. Cela fait un robot à double arme avec beaucoup de possibilités stratégiques. J'ai donc pensé que je prendrais la saison morte entre les tournois BattleBots pour poursuivre cette idée dans un petit robot de 3 livres, garder mes compétences de conception pointues et aider à sortir une autre solution pour la communauté. Pourquoi un robot de classe 3lb ? Parce que c'est une taille facile avec laquelle vous pouvez imprimer en utilisant un Mark Two !

Conception du mécanisme d'engrenage imprimé en 3D
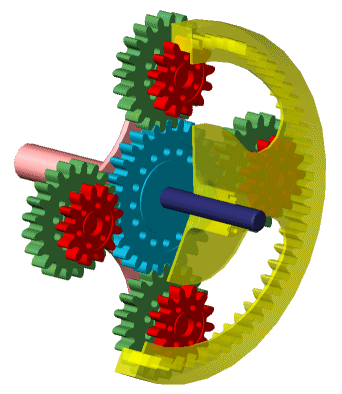
Les exigences comprennent l'emballage d'un rapport de transmission très élevé (de l'ordre de 20 ou plus pour 1) dans un volume coaxial et la recherche d'un moyen d'engager cette réduction de vitesse uniquement lorsque cela est nécessaire. J'ai enquêté sur des systèmes d'engrenages planétaires connus sous le nom de trains d'engrenages épicycloïdaux composés, en publiant plusieurs ouvrages de référence, dont le vénérable « Mechanisms and Mechanical Devices Sourcebook » et en parcourant Internet à la recherche de livres blancs sur la conception. Bref, cela permet de créer des rapports de démultiplication extrêmement élevés dans le même volume qu'un simple réducteur planétaire en profitant de la vitesse relative de deux couronnes dentées de tailles légèrement différentes.
Après un court passage à concevoir des embrayages à griffes et des bandes de friction personnalisés, j'ai réalisé que j'étais en train de concevoir ma propre transmission automatique. Les choses compliquées ne vivent généralement pas longtemps au combat, j'ai donc dû penser à une autre façon d'utiliser ce système de réduction de vitesse. La solution résidait dans l'utilisation du train d'engrenages comme dispositif de répartition du couple. Vous le savez peut-être sous le nom de « Hybrid Synergy Drive » de Toyota ou sous un certain nombre d'autres noms de marque de transmission à variation infinie. Cette découverte s'est produite, comme beaucoup dans l'histoire, par accident - je faisais tourner mon modèle CAO et j'ai découvert que l'ancrage d'une couronne faisait tourner l'autre, et vice versa. J'avais oublié que « vitesse relative » signifiait que l'une de ces vitesses peut être nulle.
Excité, j'ai rapidement modélisé une couronne et un engrenage planétaire et l'ai imprimé à l'aide d'Onyx sur un Mark Two. L'onyx est le seul matériau en qui j'avais confiance, il serait suffisamment solide et rigide. J'étais limité dans les tailles de dents d'engrenage que je pouvais utiliser en raison de la petite taille du robot ; des dents en nylon ordinaires auraient été beaucoup trop flexibles. J'ai donc voulu utiliser le modèle de jouet pour être également une jauge de tolérance pour le produit final au cas où je devais apporter des modifications dimensionnelles mineures. Le modèle a confirmé mon hypothèse selon laquelle j'avais juste besoin d'arrêter soudainement une vitesse en utilisant n'importe quelle méthode - par frein, par embrayage ou simplement grâce à un bâton à travers les rayons de la roue de vélo, et l'autre anneau est forcé de tourner !

Préparé pour le combat de robots
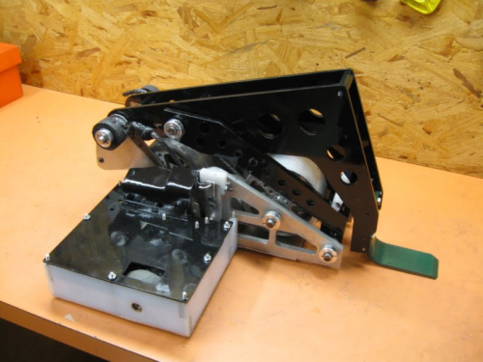
Le travail sur le robot a alors commencé sérieusement. J'ai sorti quelques-uns de mes croquis d'idéation d'il y a longtemps et j'ai décidé d'opter pour un modèle CAO de « premier passage » pour définir le concept et travailler sur les besoins de conception individuels à partir de là. Pour faire court, voici une photo du design tel qu'il se présente maintenant !
Alors que se passe-t-il ici ? Il a un corps triangulaire qui est inversible - il n'y a pas de « tête en bas » à proprement parler. L'objet rond en argent sur la gauche est un rotor en aluminium de 8 onces avec des boulons à tête creuse en tant que « dents », ce qui est une tactique courante dans cette petite catégorie de poids pour les armes tournantes. Le mécanisme planétaire est modélisé en noir (pour Onyx), et un servomoteur poussera une dent coulissante dans la couronne crantée sur commande, la forçant à s'arrêter de tourner et l'autre couronne à démarrer. Cette couronne dentée a un lobe de came décalé avec une bielle à une "liaison papillon" qui force les ailes métalliques supérieure et inférieure à s'écarter lorsque la came tourne. Les ailes métalliques s'articulent en un point commun, de sorte que l'une réagira contre le sol tandis que l'autre soulèvera tout ce qui se trouve au-dessus.
Il y a des détails et des problèmes géométriques qui doivent encore être résolus avant que cette conception ne soit terminée, mais je suis maintenant confiant dans le concept. Il a ses inconvénients - par exemple, si la dent coulissante se coince, le mécanisme sera toujours activé et le robot pourrait perdre sa mobilité. S'il tire à sec sans poids sur les ailes, il s'enverra probablement sur le toit. Mais regarder les défauts de votre conception se rendre très visibles fait partie du plaisir du sport, alors j'ai hâte de voir ce qui va se passer avec ce bot !
Voici une démo du système :
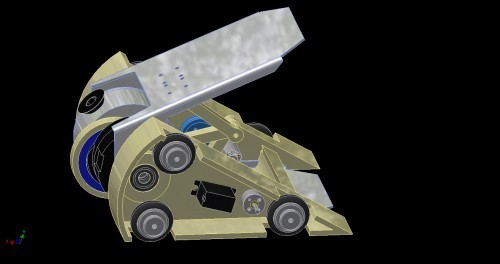
Et voici quelques autres photos du design :


Photos avec l'aimable autorisation de Charles Guan.
impression en 3D
- Entretien avec un expert :Ibraheem Khadar de Markforged
- Jigs and Fixtures :6 façons d'améliorer l'efficacité de la production avec l'impression 3D
- Créez votre robot de streaming vidéo contrôlé par Internet avec Arduino et Raspberry Pi
- Pas de maintenance. Montez en fiabilité.
- Conception et fabrication plus rapides avec Formlabs et Fusion 360
- Stratasys s'associe à GrabCAD et e-Xstream
- Correction du chaos avec SOLIDWORKS et MakerBot
- Premier visage :protection nasale en Kevlar® avec Markforged
- Pick and place - un parfait exemple d'utilisation de robot avec EasyWork