


Conduire des moteurs dans des systèmes IoT alimentés par batterie
Apprenez les techniques de conception de pilotes de moteur pour aider à prolonger la durée de vie de la batterie dans les systèmes de moteur alimentés par batterie.
De nombreux systèmes alimentés par batterie et applications Internet des objets (IoT), tels que les compteurs intelligents, les produits d'assainissement intelligents, les sonnettes vidéo, les jouets robotiques, les produits d'hygiène personnelle et les serrures électroniques, contiennent un moteur, un solénoïde ou un relais. L'interaction entre la batterie et la physique du moteur génère des défis de conception intéressants, tels que le fonctionnement fiable du système lorsque la tension de la batterie change, la réduction de l'alimentation en veille pour augmenter la durée de vie du système et la fourniture de courants importants au moteur pendant le démarrage et le décrochage.
Dans cet article, je vais offrir quelques conseils pour aider à surmonter ces défis de conception.
Présentation des systèmes de moteur alimentés par batterie
La plage de tension de la batterie disponible pour le pilote du moteur dépend de la chimie de la batterie, de la profondeur de décharge, de la température, du courant de charge et du nombre de cellules de batterie connectées en série ou en parallèle. Bien que la modélisation de batterie soit une science complexe, commençons par un modèle de batterie simple utilisant la tension en circuit ouvert (VOCV ), résistance de la batterie interne (RBAT ) et la tension aux bornes de la batterie (VBAT ), comme le montre la Figure 1 .
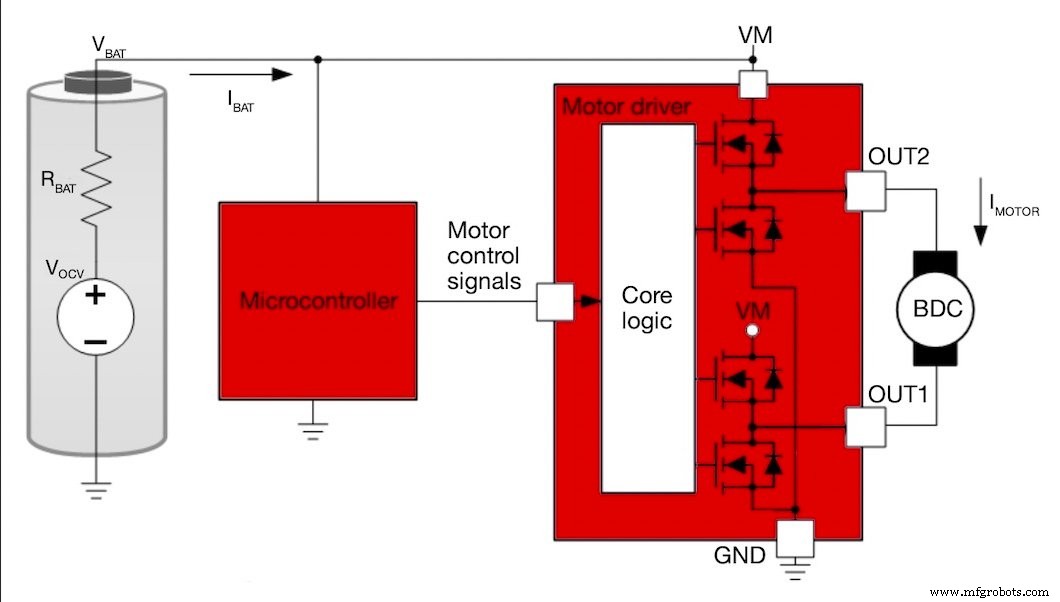
Figure 1. Schéma fonctionnel d'un système alimenté par batterie avec un pilote de moteur et un moteur.
Tableau 1 montre quelques exemples de plages de tension de batterie pour diverses chimies de batterie.
| Chimie de la batterie et empiler | VBAT de batterie complètement chargée | VBAT de batterie épuisée | RBAT | Capacité |
| 2 AA (alcalin), Duracell OP1500 | 1,7 V/cellule 3,4 V au total | 0,8 V/cellule 1.6 V au total | 100-250 mΩ/cell 200-500 mΩ au total | 2 400 mAh* |
| 3 AAA (alcalines), Panasonic LR03AD | 1,55 V/cellule 4,65 V au total | 0,8 V/cellule 2.4 V au total | 135 mΩ/cell (moyenne) 405 mΩ au total (moyenne) | 2 640 mAh |
| 4 AA (alcalins), Energizer E91 | 1,5 V/cellule 6 V/cellule | 0,8 V/cellule 3,2 V au total | 150-300 mΩ/cell (frais) 600-1200 mΩ total (frais) | 2 500 mAh* |
| 1 lithium-ion, Panasonic NCR18650BF | 4.2 V | 2,5 V | 77 mΩ* | 3 200 mAh |
| 2 lithium-polymère, Farnell SR674361P | 4,2 V/cellule 8,4 V au total | 2,75 V/cellule 5,5 V au total | 160 mΩ/cellule 320 mΩ au total | 2 000 mAh |
*Paramètres calculés à partir d'autres paramètres de la fiche technique de la batterie
Tableau 1. Paramètres de batterie approximatifs pour diverses chimies et empilements de batteries.
RBAT et VOCV sont des contributeurs clés de VBAT changeant au cours de la durée de vie de la batterie. Lorsque la charge de la batterie s'épuise, VOCV diminue, et RBAT augmente. Comme la charge tire du courant de la batterie (IBAT ), VBAT diminue en raison de la chute de tension aux bornes de RBAT .
Figure 2 montre la relation entre VOCV , RBAT et jeBAT sur toute la durée de vie de la batterie.
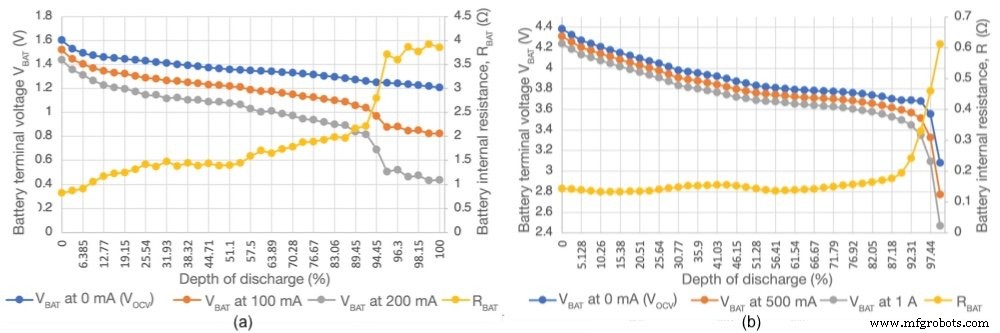
Figure 2. Tracés de VBAT et RBAT pour alcaline (a) et lithium-ion (b) batteries pour divers courants de charge de batterie (IBAT) sur la base des données de la base de données d'identification chimique de TI.
La profondeur de décharge (DoD) représente la durée de vie de la batterie en pourcentage par rapport à la capacité de charge complète de la batterie donnée en milliampères-heures (mAh). Un DoD à 100 % représente une batterie complètement déchargée.
Concevoir pour un large VBAT Portée
Parce que VBAT changements avec DoD et IBAT , la valeur nominale du rail d'alimentation d'un pilote de moteur doit s'adapter à une plage de tensions de batterie possibles. Par exemple, de nombreux pilotes de moteur conçus pour les systèmes 24 V ont un rail d'alimentation minimum de 4,5 V. Avec quatre piles alcalines connectées en série, un pilote de moteur avec une alimentation nominale minimale de 4,5 V peut se désactiver en utilisant le verrouillage de sous-tension avant que les batteries ne soient complètement égoutter.
Les DRV8210 et DRV8212 de Texas Instruments (TI) sont des exemples de pilotes de moteur conçus pour les applications alimentées par batterie avec une alimentation nominale de 1,65 V à 11 V. Cela s'adapte à la tension maximale pour une pile au lithium à deux cellules (8,4 V) ou une pile alcaline à deux cellules presque déchargée (1,65 V).
Conception pour le mode veille basse consommation
Les systèmes alimentés par batterie passent la majeure partie de leur durée de vie en état de veille. Par exemple, les consommateurs peuvent actionner des stores motorisés seulement deux fois par jour, ou verrouiller et déverrouiller une serrure électronique jusqu'à 20 fois par jour. La vanne d'un compteur de gaz ou d'eau ne doit être actionnée qu'une fois par an. Le courant de veille de l'ensemble du système doit être faible afin d'obtenir une longue durée de vie des batteries dans ces systèmes.
L'ajout de commutateurs de charge sur les rails d'alimentation des périphériques du système est un moyen de maintenir le courant de veille bas. Une autre façon est d'utiliser des appareils avec de faibles courants de veille optimisés pour les applications de batterie. Les DRV8210 et DRV8212 ont des courants de veille <84,5 nA pour aider à réduire la consommation de courant de veille du système. D'autres moyens de réduire le courant de veille du système consistent à éliminer les diviseurs de résistance et à définir les broches logiques de l'appareil avec des résistances pulldown à 0 V lorsqu'il ne fonctionne pas.
Gérer les courants importants pour réduire la consommation d'énergie et augmenter la durée de vie
Les courants importants provenant des moteurs créent deux problèmes dans les systèmes de batterie :ils utilisent de l'énergie de manière improductive et peuvent provoquer le verrouillage prématuré du système en raison de la chute de tension sur RBAT . Il existe deux causes principales de courants moteur importants :le courant d'appel lors du démarrage du moteur et le courant de calage. Figure 3 montre un exemple de ces courants.
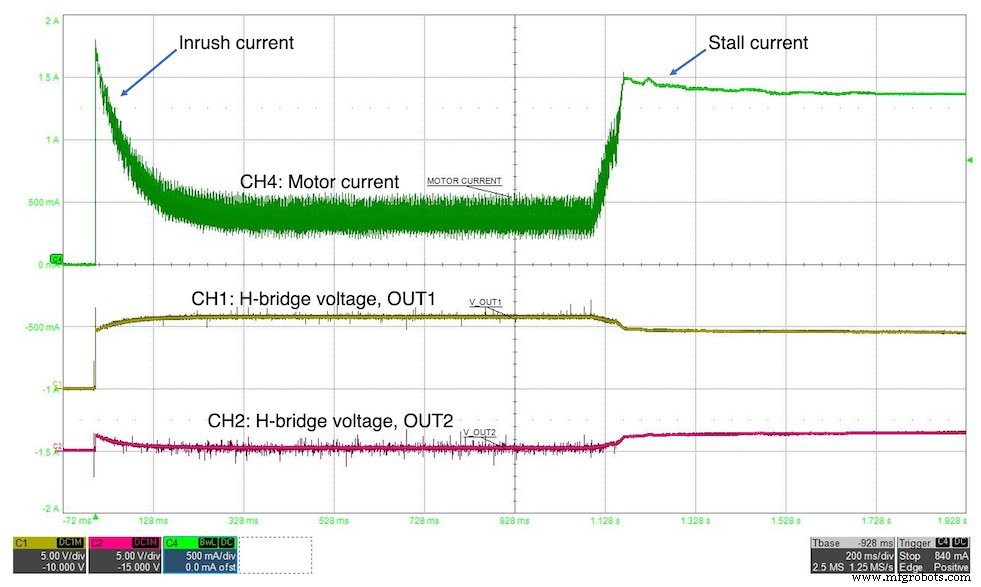
Figure 3. Courants d'appel et de décrochage.
La mise en œuvre d'une routine de démarrage progressif du moteur en augmentant le cycle d'utilisation de la modulation de largeur d'impulsion peut atténuer le courant d'appel important lors du démarrage du moteur. Figure 4 montre des exemples de mise en œuvre de démarrage difficile et de démarrage progressif pour une pile épuisée de quatre piles AAA.
Dans la Figure 4(a) , le courant d'appel du moteur fait chuter la tension de la batterie lors d'un démarrage difficile en raison de la chute de tension aux bornes de RBAT . Si ce système se réinitialise ou entre dans un état de verrouillage de sous-tension autour de 3,5 V, le moteur ne pourra pas rouler au-delà du démarrage initial.
Figure 4(b) montre comment l'utilisation d'un démarrage progressif provoque une chute de tension plus faible sur le rail d'alimentation, ce qui peut aider à augmenter la durée de vie d'un système avec une batterie épuisée.
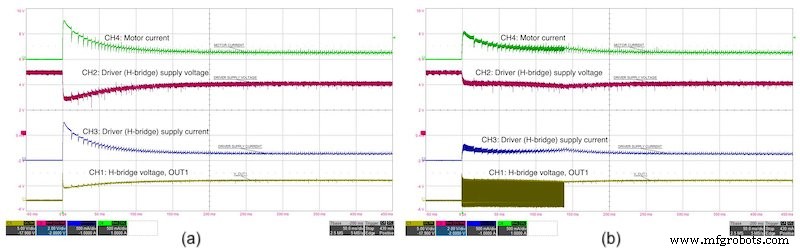
Figure 4. Difficile- (a) et démarrage progressif (b) courant d'appel sur quatre piles AAA épuisées en série à l'aide du DRV8210. La routine de démarrage progressif illustrée ici fait passer le cycle de service de 0 % à 100 % pendant le démarrage du moteur.
Pour aider à contrôler les courants de décrochage, l'ajout d'une résistance de détection de courant peut aider le microcontrôleur à détecter un décrochage et à désactiver le pilote de moteur avant de tirer des courants de décrochage importants pendant une longue période. Des conditions de décrochage peuvent survenir à la suite d'un blocage mécanique involontaire ou d'une charge mécanique atteignant une butée (comme un pêne dormant complètement actionné dans une serrure intelligente).
Figure 5 montre un exemple de mise en œuvre du système utilisant le DRV8212.
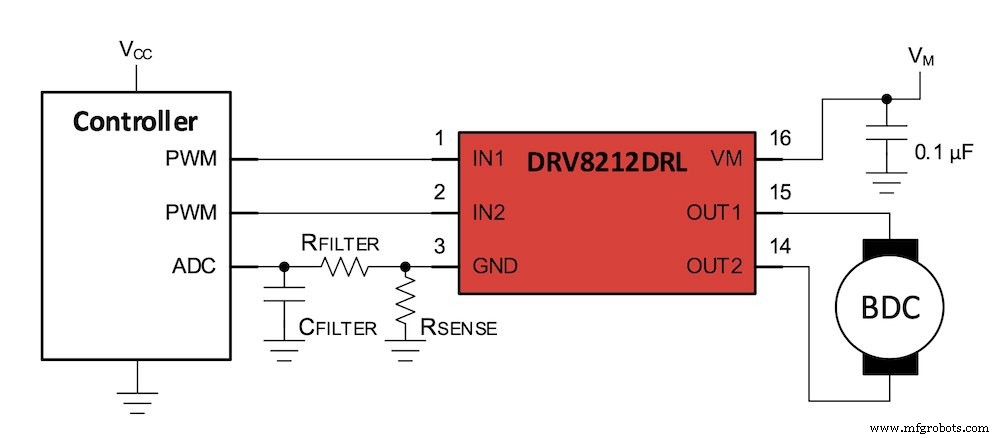
Figure 5. Exemple de schéma fonctionnel d'une implémentation de détection de décrochage avec le DRV8212.
Le convertisseur analogique-numérique du microcontrôleur mesure la tension de la résistance de détection et compare cette tension à un seuil stocké dans le micrologiciel. Si la mesure de courant dépasse le seuil pendant un certain temps, le microcontrôleur désactive le pilote de moteur pour économiser de l'énergie. Il est important de configurer la durée de détection d'un décrochage afin que le courant d'appel ne déclenche pas accidentellement la détection de décrochage.
Figure 6 montre un profil de courant du moteur pendant une condition de décrochage avec détection de décrochage mise en œuvre, tandis que la Figure 3 montre la forme d'onde du courant du moteur sans détection de calage.
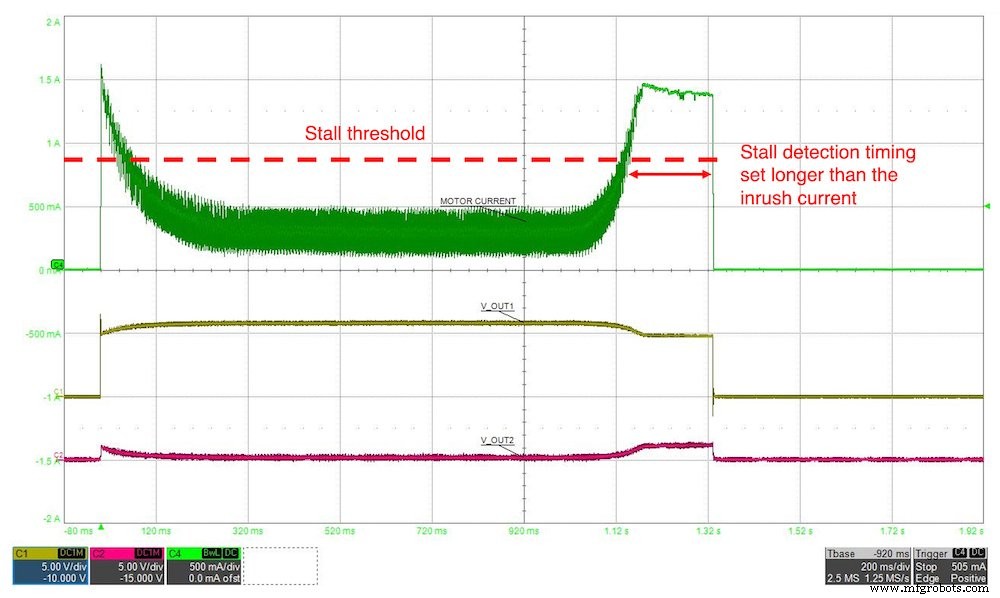
Figure 6. Profils de courant moteur avec détection de calage.
Les fabricants de batteries mesurent la capacité de la batterie en mAh. Par conséquent, limiter à la fois l'amplitude du courant d'appel et la durée du courant de décrochage permet d'allonger la durée de vie de la batterie.
Conclusion
Il peut être difficile de concevoir des systèmes alimentés par batterie qui utilisent des moteurs en raison de la durée de vie limitée de la batterie, de la variation de la tension de la batterie et des courants de moteur importants. L'utilisation d'un pilote de moteur conçu pour la plage de tension de la batterie facilite les efforts de conception en éliminant les convertisseurs de suralimentation supplémentaires et en s'adaptant à la tension de fonctionnement minimale de la batterie.
La minimisation du courant de veille global du système et l'utilisation d'un pilote de moteur avec un mode veille à faible consommation réduisent la consommation d'énergie gaspillée de la batterie. Les techniques de démarrage progressif et de détection de calage peuvent également aider à augmenter la durée de vie des applications de batterie en réduisant l'amplitude et la durée des courants de moteur importants dans le système.
En utilisant ces techniques, les concepteurs de systèmes peuvent allonger la durée de vie des systèmes alimentés par batterie tels que les produits d'assainissement intelligents, les stores motorisés, les serrures intelligentes électroniques et autres.
Les articles de l'industrie sont une forme de contenu qui permet aux partenaires de l'industrie de partager des nouvelles, des messages et des technologies utiles avec les lecteurs d'All About Circuits d'une manière qui ne convient pas au contenu éditorial. Tous les articles de l'industrie sont soumis à des directives éditoriales strictes dans le but d'offrir aux lecteurs des informations utiles, une expertise technique ou des histoires. Les points de vue et opinions exprimés dans les articles de l'industrie sont ceux du partenaire et pas nécessairement ceux d'All About Circuits ou de ses rédacteurs.
Technologie de l'Internet des objets
- Examen de l'IoT cellulaire :coût, batterie et données
- La fabrication intelligente et l'IoT sont le moteur de la prochaine révolution industrielle
- La technologie LoRa stimule l'adoption de l'IoT et change des vies
- Un leadership fort stimule l'adoption de l'IoT
- Six étapes pour sécuriser les systèmes embarqués dans l'IoT
- Là où l'ancien rencontre l'IoT, l'intégration SaaS
- Qu'est-ce que la sécurité IoT ?
- Le partenariat vise une autonomie sans fin de la batterie des appareils IoT
- L'IdO industriel n'est pas la panacée qui nous avait été promise… pour le moment