


Réaliser un suivi précis des mouvements dans les portables grand public
Nos vies ont été transformées par des gadgets portables et connectés - le plus évident du smartphone, mais aussi une multitude d'autres, tels que les montres intelligentes, les trackers de fitness et les appareils auditifs. Ces appareils combinent une collecte de données avec une puissance de traitement et une connectivité sans fil.
Mais, parmi toutes leurs autres fonctionnalités, il est facile de négliger l'importance des capteurs de mouvement pour rendre nos gadgets plus fonctionnels et intuitifs. Qu'il s'agisse de changer l'orientation de l'écran sur nos téléphones, de compter les pas sur une montre intelligente, de faire correspondre les mouvements de notre tête avec nos lunettes XR ou d'appuyer sur les écouteurs pour changer la chanson, la détection de mouvement est un élément essentiel de l'expérience utilisateur et de l'interface.
Pour les ingénieurs embarqués, choisir et intégrer des capteurs de mouvement peut être délicat. Comment pouvez-vous vous assurer de choisir la bonne technologie pour obtenir la précision dont vous avez besoin, sans augmenter inutilement les coûts ou la consommation d'énergie ? Et comment devez-vous vous assurer de tirer le meilleur parti des capteurs et de ne pas manquer les performances ou les fonctionnalités qui pourraient améliorer votre produit final ?
Principes fondamentaux des capteurs de mouvement
Tout d'abord, un bref récapitulatif de ce que nous entendons par capteurs de mouvement. Il en existe trois types couramment utilisés :l'accéléromètre, le gyroscope et le magnétomètre.
L'accéléromètre mesure l'accélération, qui peut inclure l'accélération due à la gravité. Cela signifie qu'il peut détecter la direction de la gravité par rapport au capteur - en gros, dans quelle direction est-il vers le haut. Le gyroscope mesure le changement de position angulaire en mesurant la vitesse angulaire.
Avec trois degrés de liberté, ou axes, pour chacun de l'accéléromètre et du gyroscope, la combinaison des deux nous donne un capteur de mouvement à 6 axes, ou unité de mesure inertielle (IMU) (voir Figure 1). Pour de nombreuses applications, nous devons ajouter un magnétomètre, qui mesure la force et la direction du champ magnétique terrestre, afin que nous puissions estimer notre cap. L'ajout d'un magnétomètre à 3 axes au-dessus de l'accéléromètre et du gyroscope crée une IMU à 9 axes.
Pour les besoins de cet article, nous allons discuter des IMU. Bien qu'il existe certaines propriétés dont nous discutons qui peuvent être appliquées à un accéléromètre, un gyroscope ou un magnétomètre seuls, les défis liés à la combinaison d'au moins deux de ces capteurs sont ce que nous aimerions mettre en lumière.
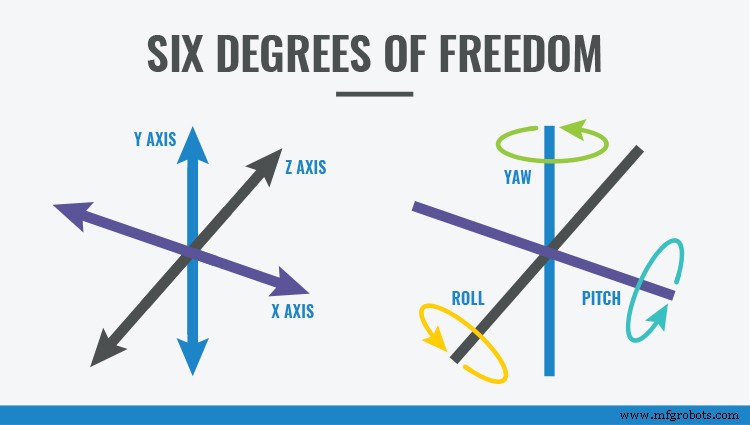
Figure 1 :Détection de mouvement avec une IMU (Source :CEVA)
Rester précis
Alors maintenant, nous nous sommes rappelé la théorie, comment cela fonctionne-t-il dans la pratique ? Comment pouvons-nous obtenir la précision dont nous avons besoin ?
Pour une IMU, la précision obtenue dans la détermination du cap de notre appareil est une mesure de base à partir de laquelle nous pouvons commencer. Nos exigences peuvent être d'un degré ou deux, tandis qu'une précision moindre pourrait être acceptable pour une autre application. Par exemple, les exigences de précision d'un casque XR seront beaucoup plus strictes que celles d'un jouet robotique pour enfants. Nous devrions alors considérer la stabilité de ces données, et si elles varieront dans le temps et avec la température.
L'obtention de la plus haute précision de sortie de notre IMU nécessite l'utilisation de la fusion de capteurs, qui consiste à combiner les données de plusieurs capteurs pour créer une somme supérieure à ses parties. Chaque capteur de notre IMU a des forces et des faiblesses différentes qui peuvent être fusionnées ensemble pour cette solution.
Une façon de penser à la fusion de capteurs est de la baser sur la « confiance ». Dans ce cas, nous pouvons utiliser « confiance » pour signifier que les données d'un capteur particulier ont un niveau de confiance raisonnable pour leur exactitude et leur pertinence. Supposons que vous êtes le président d'un pays et que vous devez déterminer les politiques. Vous avez un conseiller économique, sanitaire et militaire. Chacun vous donne son avis, mais ils connaissent tous des domaines différents. Ils ont des suppositions sur la façon dont leurs opinions affecteraient leurs homologues, mais hélas, ce ne sont que des suppositions. C'est à vous de traiter et de fusionner leurs informations pour prendre la meilleure décision.
De même, vous disposez de deux ou trois « conseillers » auxquels vous pouvez faire appel pour les données d'orientation de votre IMU :l'accéléromètre, le gyroscope et parfois le magnétomètre. Le gyroscope est le plus simple à expliquer. On peut faire confiance aux gyroscopes grand public pour les changements d'orientation relatifs sur de courtes périodes de quelques secondes, mais la sortie dérivera sur des intervalles de temps plus longs, des dizaines de secondes et plus. L'accéléromètre est utile pour mesurer la gravité à long terme, mais peut être dérouté par certains scénarios, tels qu'une accélération constante dans une voiture. On peut faire confiance au magnétomètre dans des environnements magnétiques stables, comme à la campagne ou dans les bois, mais moins lorsqu'il y a des interférences magnétiques, par exemple à l'intérieur d'un bureau construit avec des piliers en acier.
En bref, le gyroscope est précis pour les mesures à court terme, et l'accéléromètre et le magnétomètre pour les mesures à plus long terme. Avec une compréhension approfondie de leurs limites, leurs données peuvent être fusionnées pour une image plus précise de l'orientation d'un appareil.
Lorsque nous avons plusieurs sorties de capteurs, comme une IMU à 9 axes, la fusion de capteurs nous donne la possibilité de combiner et de comparer les données pour améliorer la précision. Par exemple, si notre logiciel de fusion de capteurs inclut un algorithme pour détecter les changements inattendus ou soudains dans la sortie du magnétomètre en raison d'interférences magnétiques, il peut alors automatiquement accorder plus de confiance aux données de l'accéléromètre et du gyroscope, jusqu'à ce que le magnétomètre soit à nouveau stable.
La fréquence d'échantillonnage est également importante pour la précision :le capteur que vous avez choisi fournit-il des données suffisamment souvent pour répondre à vos besoins ? Cela dépend bien sûr de l'application :par exemple, quelques lectures par seconde peuvent suffire pour un compteur de pas de base, mais 100 Hz à 400 Hz sont recommandés pour la plupart des applications. Cependant, des taux d'échantillonnage de 1 kHz ou plus peuvent être nécessaires pour un suivi précis de la tête dans les applications XR (XR est un terme fourre-tout pour la réalité virtuelle, mixte et augmentée). Un taux d'échantillonnage rapide est également important pour obtenir une faible latence, ce qui, dans notre exemple de suivi de la tête, fait la différence entre une expérience VR immersive et le mal des transports !
Nous devons également considérer l'étalonnage. De nombreux capteurs sont fournis « tels quels » avec un peu plus que ce qui est écrit sur la fiche technique à prendre en compte. Tout type d'étalonnage pouvant être effectué aidera à maximiser les performances cohérentes entre les différents capteurs individuels. L'étalonnage en usine peut être un excellent moyen d'améliorer les performances individuelles, mais il est relativement coûteux. L'étalonnage dynamique sur le terrain est une autre option qui nécessite une compréhension détaillée des capteurs eux-mêmes, ou au moins de votre application. Les capteurs subissent un biais qui, lorsqu'il n'est pas pris en compte, peut avoir un impact négatif sur la sortie globale à un point qui exacerbe toute erreur existante.
Enfin, nous devons réfléchir à la manière de vérifier les données des capteurs que nous avons obtenues et fusionnées. Bien que cela dépende de ce que nous suivons, le principe de base consiste à utiliser une autre source d'informations indépendante pour nous donner une vérité contre laquelle nous pouvons vérifier notre sortie. Par exemple, un bras de robot pourrait être déplacé à plusieurs reprises très précisément vers un point connu, et nous pouvons alors voir si nos capteurs nous donnent les mêmes données de position. Lorsque nous détectons une erreur, il peut être possible de la compenser par un calcul, ou il peut être nécessaire de la signaler comme une erreur nécessitant une attention particulière.
Activation de nouvelles fonctionnalités
Une fois que nous avons la capacité de mesurer le mouvement avec une grande précision, cela n'aide pas seulement les applications existantes, cela peut ouvrir la possibilité de nouvelles capacités dans les appareils portables. Par exemple, avec les écouteurs (Figure 2), les interfaces utilisateur conventionnelles sont problématiques :les utilisateurs ne veulent pas s'engager à sortir leur téléphone pour les contrôler, et les écouteurs eux-mêmes sont trop petits pour avoir des boutons pratiques. Au lieu de cela, les tapotements sur les écouteurs peuvent être utilisés pour sauter une chanson, et la détection du mouvement de les retirer de vos oreilles peut être utilisée pour couper tout le son - car c'est probablement le cas lorsque vous voudriez que le son s'arrête de toute façon. L'utilisation du mouvement et des « classificateurs », qui sont des algorithmes pour identifier différents mouvements, conduit à une expérience utilisateur plus pratique et intuitive.

Figure 2 :Appareils audibles (Source :CEVA)
Des informations précises provenant de capteurs de mouvement peuvent également signifier que votre appareil portable a une meilleure idée de ce qui se passe autour de vous ou de l'activité dans laquelle vous êtes engagé. C'est ce qu'on appelle la connaissance du contexte et peut être utilisé pour offrir une expérience plus immersive, telle que en réduisant le volume de votre musique lorsqu'un signal sonore détecte que vous vous dirigez vers un passage pour piétons pour vous permettre d'entendre la sirène d'une ambulance à proximité.
Pour les applications de suivi de la condition physique, une précision accrue peut différencier les différentes activités des utilisateurs. Par exemple, si votre suiveur de pas peut mesurer la taille, la vitesse ou d'autres caractéristiques de vos mouvements, cela peut fonctionner si vous marchez simplement normalement, ou peut-être montez ou descendez des escaliers. Combiné avec d'autres données de capteur, telles que la pression atmosphérique et la localisation dérivée du GPS, le logiciel peut créer une image détaillée de vos mouvements et estimer les calories brûlées.
Ensemble :fusion de capteurs et logiciel
Comme nous l'avons vu, afin de maximiser la précision et l'utilité des données de mouvement, il ne suffit pas de produire simplement un flux de données brutes. Les appareils doivent traiter les données, compenser les inexactitudes systématiques et combiner les informations de plusieurs capteurs.
Il y a beaucoup de choses à maîtriser ici. La fusion du capteur est compliqué, et nécessite un certain savoir-faire pour obtenir les meilleurs résultats dans un petit emballage. Cependant, il existe divers produits disponibles qui intègrent les capteurs et le traitement requis - par exemple le BNO080/085, développé par un partenariat entre Bosch et CEVA Hillcrest Labs, comprend un accéléromètre, un magnétomètre et un gyroscope hautes performances, ainsi qu'un faible -alimentation MCU ARM Cortex M0+ 32 bits.
Le logiciel de concentrateur de capteurs MotionEngine™ de Hillcrest Labs, qui est préprogrammé sur le BNO085, fournit un suivi de mouvement sur 6 et 9 axes, ainsi que des fonctionnalités intelligentes telles que la classification des activités de l'utilisateur comme la marche, la course et la position debout (Figure 3). Le concentrateur de capteurs MotionEngine est compatible avec les principales architectures de traitement embarqué et systèmes d'exploitation, avec des versions spécialisées disponibles pour les appareils auditifs, les téléviseurs intelligents, la robotique, l'informatique mobile, les télécommandes, les applications mobiles à faible consommation, et plus encore.
cliquez pour l'image en taille réelle
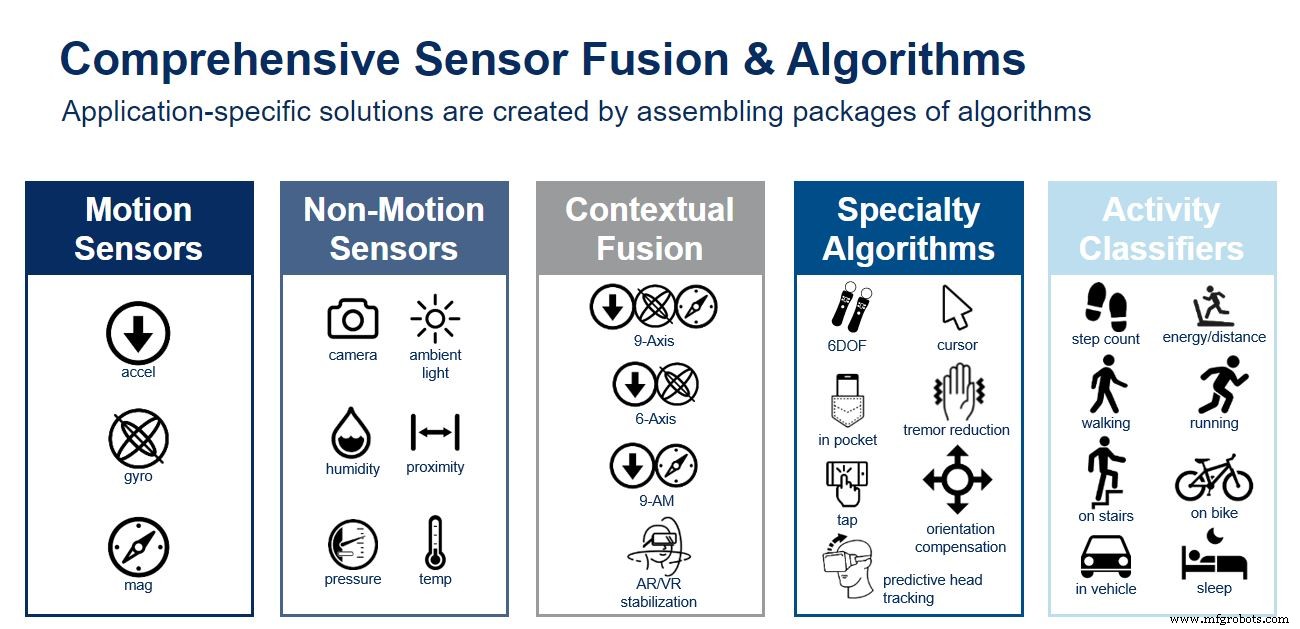
Figure 3 : Fusion complète de capteurs et algorithmes (Source :CEVA)
Rassembler toutes ces données, en temps réel, peut être difficile et nécessite une quantité non négligeable de performances de traitement. Il est peut-être préférable de choisir des capteurs intégrés qui exécutent certains de ces algorithmes sur un cœur MCU dans le capteur lui-même, plutôt que de nécessiter un processeur d'application principal pour assumer ces tâches. En particulier, pour les tâches « toujours actives » comme le comptage de pas, si nous pouvons éviter de réveiller le processeur principal à chaque fois qu'un mouvement est détecté, il peut rester en mode veille, ce qui réduit la consommation d'énergie globale et augmente la durée de vie de la batterie. Pour revenir à notre analogie précédente, un SiP se concentrant sur la fusion de capteurs, c'est comme avoir un vice-président qui s'occupe de certaines décisions afin que le président, le processeur principal, puisse se concentrer sur des tâches plus immédiates.
Conclusion
Les capteurs de mouvement jouent un rôle important dans de nombreuses applications, mais il n'est pas toujours évident de savoir comment choisir le bon appareil et comment atteindre le degré de précision requis pour votre application - ou même à quel point vous devez être précis. Différents cas d'utilisation nécessitent différents niveaux de précision et ont des exigences variables pour le type de données nécessaires.
Les capteurs intégrés et la fusion de capteurs peuvent souvent apporter une solution à ce problème. En travaillant avec un fournisseur approprié, vous pouvez vous assurer de ne pas compromettre l'obtention de données précises et fiables, ainsi que de fonctionnalités à valeur ajoutée pour des applications spécifiques, tout en réduisant les coûts et la consommation d'énergie au minimum.
Embarqué
- ADC de suivi
- Entretien d'experts :Jonathan Warbrick de Graphite Additive Manufacturing sur la réussite de l'impression 3D
- ST :capteur de mouvement avec apprentissage automatique pour un suivi d'activité haute précision et économe en batterie
- Les capteurs de mouvement prennent en charge les exigences de tolérance aux pannes
- Suivi de la boule Raspberry Pi
- Capteur de mouvement utilisant Raspberry Pi
- Technologie de mouvement linéaire
- Système de suivi de mouvement 3D pour technologie autonome
- Badges chez PwC