


Cobots 2026 :comment fonctionnent les robots collaboratifs et pourquoi ils sont importants

Par l'équipe éditoriale d'EVST · Dernière mise à jour :10 juin 2026
Un robot collaboratif, ou cobot, est un bras industriel léger conçu pour fonctionner à côté des personnes sans avoir besoin d'une barrière de sécurité. Il y parvient grâce à une limitation de la puissance et de la force :des capteurs de couple dans chaque articulation détectent le contact et arrêtent ou rétractent immédiatement le bras avant qu'une collision ne puisse causer des blessures. La norme ISO/TS 15066 décrit quatre modes de collaboration qui définissent la proximité autorisée entre un humain et un robot. En 2026, les charges utiles des cobots varient généralement de 3 kg à 30 kg, avec des portées d'environ 600 mm à 1 800 mm.
Qu'est-ce qui différencie un cobot d'un robot conventionnel
Le terme « collaboratif » fait référence à la capacité de sécurité et non à une classe mécanique distincte. Un cobot reste un bras articulé à 6 axes équipé de servomoteurs, de boîtes de vitesses et d'encodeurs sur chaque articulation. Ce qui le distingue, c'est la détection et le contrôle supplémentaires qui lui permettent de partager un espace de travail en toute sécurité, combinés à une conception qui minimise les risques de blessures :bords arrondis, faible masse en mouvement, aucun point de pincement et limites de vitesse.
Les robots industriels traditionnels sont conçus pour la vitesse, la charge utile et la répétabilité au sein d'une cellule gardée, en supposant qu'il n'y ait aucune présence humaine dans l'enveloppe de travail. Les cobots échangent leur vitesse de pointe et leur charge utile contre la capacité de fonctionner dans un espace partagé, ce qui modifie à son tour l'économie du déploiement :une cellule de cobot peut renoncer aux clôtures, aux barrières immatérielles et à l'espace aérien requis par une cellule clôturée. Cette économie de coûts constitue un avantage clé pour les petits et moyens fabricants. Pour une présentation structurée des types de cobots et des critères de sélection, consultez notre guide complet sur les types, la sélection et les applications de cobots, qui complète cet article par une analyse plus approfondie des mécanismes de sécurité.
Selon le rapport 2025 World Robotics de la Fédération internationale de robotique, les robots collaboratifs restent le segment du marché des robots industriels qui connaît la croissance la plus rapide en termes de taux de croissance unitaire, même s'ils représentent encore une minorité du total des installations. La croissance est concentrée dans l'assemblage électronique, la maintenance des machines et l'emballage, des domaines où le poids des pièces est faible et où la proximité homme-robot est utile sur le plan opérationnel.
Comment fonctionne un cobot :les mécanismes de sécurité
La technologie de base qui permet aux cobots de détecter et de limiter la force de contact. En 2026, trois approches dominent, et la plupart des cobots de production en combinent plusieurs.
Détection de couple articulaire
Chaque joint contient un capteur de couple, ou le contrôleur déduit le couple du courant du moteur. Pendant un mouvement normal, le contrôleur connaît le profil de couple attendu pour la trajectoire programmée à la vitesse programmée. Si le couple mesuré dépasse un seuil, le contrôleur l'interprète comme une force externe inattendue, déclenche un arrêt de protection et amène le bras dans une position sûre. Le temps de réaction entre le contact et l'arrêt est de l'ordre de quelques millisecondes, ce qui maintient la force de contact en dessous des seuils de blessure.
Limitation de puissance et de force (PFL)
PFL est la méthode collaborative la plus courante. Le robot est conçu et configuré de telle sorte que, même dans le pire des cas, la force et la pression transmises restent inférieures aux limites biomécaniques définies dans la norme ISO/TS 15066 Annexe A pour la région corporelle concernée. Ceci est obtenu grâce à une faible masse mobile, des limites de vitesse, une géométrie arrondie et la butée à détection de couple décrite ci-dessus. PFL permet à de nombreux cobots de fonctionner sans clôtures ni barrières immatérielles, car le robot lui-même fait office de système de sécurité.
Surveillance de la vitesse et de la séparation
En alternative ou en complément, des capteurs de sécurité externes, tels que des scanners laser, des caméras 3D ou des tapis de sécurité, suivent la position de l'opérateur. Le robot tourne à pleine vitesse lorsque personne n'est à proximité, ralentit lorsqu'une personne s'approche et s'arrête si la distance de séparation de protection n'est pas respectée. Cela permet à un robot plus rapide et plus lourd de se comporter de manière collaborative sans sacrifier la vitesse de production lorsque l'espace de travail est dégagé.
En pratique, les déploiements les plus propres combinent des méthodes :le PFL comme sécurité de base, avec une surveillance de la vitesse et de la séparation superposée pour récupérer le débit lorsqu'aucun opérateur n'est présent. Les observations de l'industrie issues des déploiements sur les chaînes d'assemblage montrent qu'un cobot configuré uniquement pour la vitesse PFL la plus défavorable peut perdre 40 à 60 % de son débit potentiel par rapport au même bras autorisé à fonctionner rapidement lorsque l'espace de travail est dégagé. C'est pourquoi les configurations hybrides sont désormais la configuration par défaut sur les lignes à plus gros volume.
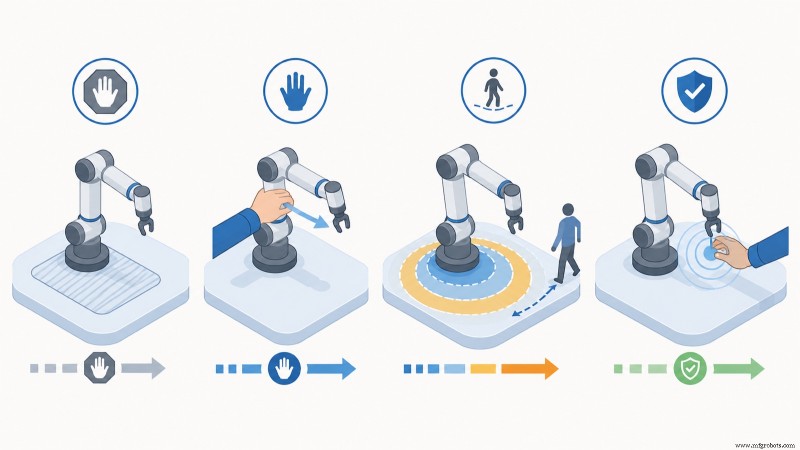
Les quatre modes de collaboration selon ISO/TS 15066
L'ISO/TS 15066 :2016 complète l'ISO10218 pour le fonctionnement collaboratif et définit quatre méthodes de collaboration distinctes. Une même application peut en utiliser un ou en combiner plusieurs. Comprendre le mode dont une application a besoin est la première étape pour spécifier une cellule de cobot sécurisée.
| Mode de collaboration | Comment ça marche | Interaction homme-robot | Application typique |
|---|---|---|---|
| Arrêt surveillé de sécurité | Le robot s'arrête lorsqu'une personne entre dans l'espace partagé ; reprend quand ils partent | Aucun mouvement tant qu'un humain est présent dans la zone collaborative | Chargement/déchargement manuel d'une cellule robotisée, tâches ponctuelles en espace partagé |
| Guidage manuel | L'opérateur déplace physiquement le bras à l'aide d'un dispositif de guidage manuel ; le robot se conforme à la force appliquée | Guidage physique direct, mouvement du robot piloté par l'opérateur | Parcours pédagogiques, levage assisté, positionnement de pièces à faible volume |
| Surveillance de la vitesse et de la séparation | Échelles de vitesse du robot avec distance de l'opérateur, mesurées par des capteurs de sécurité | Coexistence avec réduction dynamique de la vitesse, arrêt complet à distance minimale | Cellules mixtes où humains et robots travaillent en proximité alternée |
| Limitation de puissance et de force | Force de contact et pression maintenues en dessous des limites biomécaniques grâce à la conception et au contrôle | Contact direct autorisé ; le robot s'arrête suite à une force inattendue | Assemblage partagé, maintenance des machines, emballage à côté des opérateurs |
L'ISO/TS 15066 organise les limites biomécaniques par région du corps :les limites pour le visage et le crâne sont bien plus strictes que pour le haut du bras ou la main, reflétant la gravité des blessures potentielles. Une évaluation correcte des risques cartographie les parties de la trajectoire du robot où le contact est possible avec les régions du corps qui pourraient être contactées, puis vérifie que la force et la pression restent inférieures à la limite pertinente. C'est pourquoi un cobot « sûr » pour une application ne l'est pas automatiquement pour une autre :changer d'outil, de pièce ou d'agencement change les scénarios de contact.
Anatomie d'un cobot :composants et spécifications
La fiche technique d’un cobot ressemble à celle d’un petit robot industriel, avec quelques ajouts spécifiques à la collaboration. Les paramètres les plus importants lors de la sélection sont :
- Charge utile — la masse maximale au niveau de la bride de l'outil, y compris la pince ou l'outil. 2 026 charges utiles de cobots regroupées en 3, 5, 6, 10, 12, 16, 18, 20 et jusqu'à la classe des 30 kg.
- Portée — le rayon de l'enveloppe de travail, généralement compris entre 500 mm et 1 800 mm. La portée et la charge utile s'équilibrent au sein d'une famille de produits.
- Répétabilité — la précision avec laquelle le bras revient à un point appris, généralement ±0,02 mm à ±0,1 mm selon la taille. La répétabilité mesure la cohérence, ce dont ont besoin la plupart des tâches d'assemblage et d'entretien.
- Degrés de liberté — six est la norme pour les tâches générales en 3D ; Les cobots à sept axes ajoutent une flexibilité de portée dans les espaces encombrés.
- Bride d'outil et E/S — l'interface de montage et les connexions électriques/pneumatiques pour les pinces et les capteurs, souvent acheminées par le poignet.
- Fonctions de sécurité — zones de sécurité configurables, limites de vitesse, limites de force et arrêt surveillé de sécurité, tous certifiés selon les niveaux de sécurité fonctionnelle ISO10218-1 et IEC61508/62061.
La capacité de collaboration réside principalement dans le contrôleur et la détection conjointe, et non dans un seul composant visible. C'est pourquoi deux bras ayant une charge utile et une portée identiques peuvent différer considérablement en termes de sécurité et de vitesse :la différence réside dans le contrôleur de sécurité, la résolution du capteur et le réglage de la détection de collision.
Où les cobots sont appliqués
Les cobots prospèrent dans les applications où le poids des pièces est modeste, la proximité humaine est utile et la flexibilité de redéployer le bras compte plus que le temps de cycle de pointe. Les familles d'applications les plus courantes en 2026 incluent :
Entretien des machines
Chargement et déchargement de machines CNC, de presses à injection et de presses plieuses. Le cobot prélève une pièce brute, charge la machine, attend le cycle et décharge la pièce finie. L’opérateur pouvant toujours accéder à la machine lorsque le cobot est arrêté, la cellule reste flexible. La maintenance des machines est la plus grande application de cobot par base installée.
Assemblage et vissage
Tâches répétitives de fixation, d'insertion et d'assemblage, souvent aux côtés d'un humain qui gère des étapes exigeantes en jugement. Les cobots à contrôle de force excellent dans les tâches d'insertion (ajustements par pression, ajustements par encliquetage) où un profil de force programmé évite d'endommager les pièces.
Emballage et palettisation
Mise en caisses de fin de ligne et palettisation légère. Les palettiseurs Cobot manipulent des boîtes jusqu’à la charge utile du bras, créant ainsi des piles stables sur une palette. Pour les caisses plus lourdes, la charge utile devient le facteur limitant et un robot de palettisation conventionnel prend le relais.
Inspection qualité et automatisation du laboratoire
Les cobots équipés de caméras ou de capteurs effectuent des passes d'inspection répétables et, dans les laboratoires, ils manipulent des échantillons, des pipettes et des instruments. La disposition sans clôture convient aux environnements où les personnes et les équipements partagent des bancs étroits.
Soudage et finition de surface
Le soudage Cobot s'est développé rapidement dans les ateliers, où les joints courts et les faibles volumes ne justifient pas une cellule de soudage clôturée. Les cobots gèrent également le ponçage, le polissage et l’ébavurage avec contrôle de la force. Pour un soudage soutenu de gros volumes de pièces lourdes, un bras clôturé à 6 axes reste l'outil idéal, comme expliqué dans notre guide des robots de soudage pour l'industrie lourde.
Environnements dangereux et extrêmes
Les cobots antidéflagrants étendent les opérations collaboratives aux atmosphères contenant des gaz inflammables, telles que les installations chimiques, de peinture et d'énergie. Ceux-ci nécessitent des boîtiers certifiés plutôt que des boîtiers de cobot standard. Consultez notre guide dédié aux cobots antidéflagrants pour les environnements dangereux pour plus de détails sur la certification.
Cobot vs robot industriel :quand chacun gagne
Le choix entre un cobot et un robot industriel conventionnel est une décision d’application et non une question de savoir quelle technologie est la plus avancée. La matrice ci-dessous encadre le compromis.
| Facteur | Robot collaboratif | Robot industriel conventionnel |
|---|---|---|
| Charge utile | 3 à 30 kg typique | 5 à 800+kg |
| Vitesse | Limité pour des raisons de sécurité ; plus rapide grâce à la surveillance des séparations | Élevé, optimisé pour le temps de cycle |
| Protection de sécurité | Souvent sans clôture après évaluation des risques | Cellule clôturée, barrières immatérielles, verrouillages |
| Espace au sol | Compact, sans empreinte de protection | Plus grand, inclut un périmètre de sécurité |
| Redéploiement | Rapide ; le bras peut être déplacé entre les tâches | Plus lent ; la cellule est semi-permanente |
| Adapté à | Faible charge utile, forte mixité, tâches adjacentes aux humains | Volume élevé, charge utile élevée, cycle soutenu |
Pour un cadre décisionnel complet, consultez notre analyse complémentaire, cobot vs robot industriel :lequel devrait choisir votre usine en 2026. En bref, un cobot gagne lorsque la charge utile est faible, l'aménagement bénéficie du partage de l'espace avec les personnes et la ligne change souvent; un robot conventionnel gagne lorsque le volume et la charge utile sont élevés et que la cellule peut être dédiée.
Déployer un cobot en toute sécurité :l'évaluation des risques
Une idée fausse courante est qu’un cobot est « sécurisé dès sa sortie de la boîte ». Le bras est conçu pour être collaboratif, mais l'application dans son ensemble (le bras plus l'outil, la pièce, la disposition et la tâche) doit être évaluée et certifiée. Selon ISO10218‑2 et ISO/TS15066, l'intégrateur (souvent l'utilisateur final) est responsable d'une évaluation des risques de l'application collaborative complète.
- Identifier les dangers. Cartographiez chaque point de la trajectoire du robot où un contact avec une personne est possible, ainsi que les risques liés aux outils (préhenseurs pointus, effecteurs chauds) et la pièce manipulée.
- Classer le mode de collaboration. Décidez lequel des quatre modes ISO/TS15066 la tâche utilise et pour quelles phases du cycle.
- Vérifiez les limites biomécaniques. Pour un fonctionnement limité en puissance et en force, confirmez que la force et la pression de contact pour chaque contact possible restent inférieures à la limite de l'Annexe A pour cette région du corps, par calcul ou par mesure avec un appareil de test force-pression.
- Configurer les fonctions de sécurité. Définissez les limites de vitesse, de force et de zone dans le contrôleur de sécurité et validez-les.
- Documenter et valider. Enregistrez l'évaluation, validez la cellule telle que construite par rapport à celle-ci et réévaluez chaque fois que l'outil, la pièce ou la présentation change.
En pratique, lorsque les ingénieurs d'application EVST mettent en service une cellule collaborative sur site, le constat le plus fréquent lors de la validation est qu'une pince ou une pièce à arête vive crée une pression de contact supérieure à la limite de l'Annexe A alors même que le bras lui-même est dans les limites de force. Le correctif consiste généralement en une refonte de la pince, une protection des bords ou une réduction de la vitesse sur le segment de trajectoire affecté, et non un robot différent. C'est l'étape que les acheteurs sous-estiment le plus souvent lorsqu'ils supposent qu'un cobot supprime le besoin d'ingénierie de sécurité.
Gamme de robots collaboratifs EVST
EVST, dont le siège est à Chengdu et la fabrication à Wenling, a expédié des produits d'automatisation dans plus de 100 pays en sept ans. Sa gamme de robots collaboratifs couvre des charges utiles de 3 kg à 30 kg, avec des modèles publiés comprenant un bras de 3 kg/620 mm, un bras de 6 kg/917 mm, un bras de 12 kg/1 300 mm et un bras de 18 kg/900 mm. EVST produit également un robot collaboratif antidéflagrant pour les atmosphères dangereuses et une gamme de cobots pour les services de restauration, aux côtés de ses robots industriels conventionnels QJAR, SCARA et delta.
La ligne de production d'EVST est titulaire de la certification de qualité automobile IATF16949 et ses produits sont certifiés par des tiers CE, SGS et TUV. Le cobot antidéflagrant est conçu pour être utilisé dans des atmosphères inflammables, étendant le fonctionnement collaboratif dans des environnements dans lesquels les boîtiers de cobot standard ne peuvent pas pénétrer. La société détient également un brevet d'invention (CNZL202011601091.6), quatre brevets d'invention en cours d'examen quant au fond et deux droits d'auteur sur les logiciels, soutenus par un réseau d'ingénierie de terrain couvrant plus de 100 pays pour la mise en service sur site et l'assistance à l'évaluation des risques.
Questions fréquemment posées
Qu'est-ce qu'un robot collaboratif en termes simples ?
Un robot collaboratif est un bras robotique conçu pour travailler en toute sécurité à côté de personnes sans barrière de sécurité. Il utilise des capteurs de couple dans ses articulations pour détecter le contact et s'arrêter rapidement. Il est conçu avec une faible masse, une vitesse limitée et des surfaces arrondies afin que tout contact reste en dessous des limites de force et de pression susceptibles de provoquer des blessures, telles que définies dans la norme ISO/TS15066.
Les cobots n'ont-ils vraiment pas besoin d'une barrière de sécurité ?
Souvent, mais pas automatiquement. La nécessité d'une clôture dépend de l'évaluation des risques de l'application complète, du bras et de son outil, de la pièce et de la tâche. De nombreuses applications à faible charge utile et à faible vitesse fonctionnent sans barrière après évaluation. Mais un outil tranchant, une pièce lourde ou tranchante ou une exigence de vitesse élevée peuvent nécessiter une protection supplémentaire ou une surveillance de la vitesse et de la séparation. Le cobot permet un aménagement sans clôture ; l'évaluation des risques confirme si cela est autorisé.
De quelle charge utile et de quelle portée ai-je besoin pour un cobot ?
Ajoutez le poids de la pièce et le poids de la pince à la taille de la charge utile et laissez une marge d'environ 20 à 30 %. Pour l'entretien des petites pièces par machine, un bras de 5 kg à 10 kg est courant ; pour palettisation ou manutention plus lourde, 16kg à 30kg. La portée doit couvrir toute l'enveloppe de travail de la tâche, généralement de 600 mm à 1 300 mm pour les travaux sur table et sur machine, et plus longue pour la palettisation.
Quelle est la différence entre ISO10218 et ISO/TS15066 ?
ISO10218 (parties 1 et 2) est la norme de sécurité de base pour les robots industriels et leur intégration. ISO/TS15066 est une spécification technique qui la complète spécifiquement pour le fonctionnement collaboratif, en ajoutant les quatre modes de collaboration et les limites biomécaniques de force et de pression dans son Annexe A. Une application collaborative doit satisfaire les deux. Pour une analyse axée sur l'acheteur, consultez notre guide des normes de sécurité des cobots sur le site des produits EVST.
À quelle vitesse un cobot peut-il se déplacer ?
En mode puissance et force limitées, la vitesse du cobot est plafonnée afin que le contact dans le pire des cas reste dans les limites biomécaniques, souvent bien en dessous d'un robot conventionnel. Grâce à la surveillance de la vitesse et de l'espacement, le même bras peut fonctionner près de son maximum mécanique lorsqu'aucun opérateur ne se trouve dans la zone de protection, puis ralentir ou s'arrêter à l'approche d'une personne. Les configurations hybrides récupèrent la majeure partie du débit perdu tout en préservant la sécurité collaborative.
Où aller ensuite
Pour faire correspondre un cobot spécifique à une exigence de charge utile et de portée avec un chemin vers un devis, consultez le guide du site produit EVST pour la sélection de charge utile de robot collaboratif de 3 kg à 30 kg. Pour connaître les détails des normes de sécurité dont les acheteurs ont besoin avant de spécifier une cellule sans clôture, consultez les normes de sécurité des cobots expliquées aux acheteurs. Pour une décision plus large de construire ou d'acheter, lisez cobot vs robot industriel et pour estimer les retours, notre calculateur de retour sur investissement de cobot pour les PME manufacturières. Pour les questions d'approvisionnement, le service commercial EVST est joignable via la page de contact.
À propos de l'auteur :L'équipe éditoriale d'EVST écrit sur la robotique industrielle et la fabrication intelligente pour les ingénieurs et les responsables des opérations évaluant des projets d'automatisation. EVST (EVSTECHCO.,LTD), fondée à Chengdu en 2018, a réalisé plus de 600 projets d'automatisation et est expédiée dans plus de 100 pays, avec la certification de qualité automobile IATF16949 et les certifications tierces CE/SGS/TUV pour les familles de produits QJAR, robot collaboratif, SCARA et delta.
Robot industriel
- Robots de soudage KUKA :une histoire
- Conception pour l'assemblage robotique
- Soudage robotisé :comment les robots peuvent aider à automatiser les tâches de soudage
- Une cellule de travail robotisée pour chaque industrie
- Amélioration des cadences de production avec SpeedRack Products Group – Quincy, MI
- 5 applications robotiques dans l'industrie aérospatiale
- Démarrer avec l'automatisation de l'atelier d'usinage
- Derniers développements en robotique industrielle :CoBots
- Optimiser pour une amélioration continue