


Singularité robotique :ce que c'est dans les bras robotiques
Source :www. idtechex.com
L'utilisation de bras robotiques dans l'industrie manufacturière est en augmentation, de plus en plus d'entreprises profitant des avantages de l'utilisation de bras robotiques. Si vous envisagez d'intégrer des bras robotiques dans vos processus métier, vous devez vous assurer d'être bien informé. Recherchez un fabricant de bras robotiques de qualité avec lequel vous pouvez travailler pour des résultats de qualité.
Le bras robotique comprend le corps, le poignet et également l'effecteur final. L'effecteur final est ce qui est utilisé pour conserver différents produits ou assumer diverses tâches. Dans la plupart des cas, vous aurez besoin que l'effecteur final se déplace dans différentes directions avec précision. C'est là que vous devez vous assurer que vous êtes conscient de la singularité du robot et de la façon dont elle affecte les performances de votre bras robotique. Dans cet article, nous approfondissons la singularité du robot et pourquoi il est essentiel de la garder à l'esprit. Source :www. revuetechnologique.com
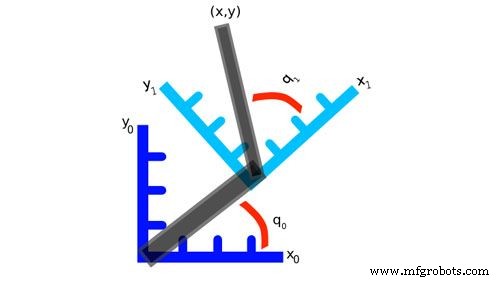
La singularité du robot fait référence à une configuration dans laquelle le mouvement de l'effecteur du robot est bloqué dans certaines directions. Cette configuration limite l'efficacité et la précision du bras robotique avec lequel vous travaillez. Généralement, lorsqu'il s'agit de bras robotiques à 6 axes, ils fonctionnent en se déplaçant par rapport aux axes X, Y et Z dans un plan 3D ou cartésien. Il se compose de 6 articulations qui contribuent aux 6 degrés de liberté dont bénéficie le bras robotique en action.
Ce degré de liberté permet au bras robotique de se déplacer dans différentes directions et d'accomplir facilement les tâches pour lesquelles il est conçu. Si par hasard, l'effecteur du robot n'arrive pas à atteindre les produits ou se déplace dans la mauvaise direction, c'est là qu'intervient le problème de la singularité. Certaines singularités sont assez faciles à identifier et à résoudre vous permettant de retourner dans votre Tâches. Cependant, d'un autre côté, certains robots connaîtront des singularités plus difficiles à identifier, sauf à l'aide de formules complexes et longues. Source :www. mecademic.com
La singularité du robot présentera différents effets et également des défis, en particulier lors de l'identification des problèmes spécifiques. Ces défis varient en fonction de quelques facteurs présentés sur le bras robotique avec lequel vous travaillerez. La complexité et la gravité de la singularité vécue par votre robot dépendent du nombre d'articulations, du type de robot (linéaire ou rotatif) et de la disposition géométrique.
Un bras de robot industriel dispose de deux espaces où il peut être facilement contrôlé. Il s'agit généralement de l'espace joint et de l'espace cartésien. Avec les différents espaces où fonctionne le bras robotique, vous constaterez qu'il comportera deux ensembles de commandes de mouvement en mode position.
En ce qui concerne les commandes d'espace articulaire, le robot recevra des instructions spécifiques avec l'ensemble souhaité d'espaces articulaires. Il se déplacera ensuite pour amener chaque articulation au positionnement articulaire suggéré dans une translation linéaire et simultanée. Avec les commandes d'espace cartésien, la suggestion au robot comportera la pose souhaitée pour l'effecteur final avec un chemin cartésien spécifique. Le chemin cartésien est conçu pour être linéaire ou circulaire.
Pour que le robot s'aligne avec précision avec l'articulation cartésienne et les commandes, le contrôleur du robot calcule la cinématique de position et de vitesse inverse du robot. Cela se traduit par le bon positionnement de l'effecteur final pour effectuer la tâche conçue. Cependant, si les calculs sont erronés, les singularités se produisent là où vous trouvez que l'effecteur final n'est pas positionné avec précision. Cela vous montre les configurations que vous souhaitez éviter pour éviter que les problèmes de singularité n'entravent vos processus d'automatisation. Source :www. dignited.com
Les singularités des robots doivent être évitées à tout prix pour garantir que votre bras robotique industriel puisse fonctionner au mieux sur les tâches souhaitées. En savoir plus sur la fonction de la singularité du robot vous permettra de mieux comprendre pourquoi vous devriez viser à l'éviter. La singularité du robot est principalement associée à deux fonctions distinctes. Source :studywolf. wordpress.com
Considérons deux robots cartésiens utilisés pour orienter leurs effecteurs terminaux dans des directions différentes. Les deux robots présentent le positionnement à six axes avec des piles de trois guides linéaires orthogonaux et trois étapes de rotation. Lorsque le robot utilisé peut garder les axes et les articulations là où ils sont censés être, l'orientation de l'effecteur final est alors facile.
Il peut utiliser en continu l'effecteur le long du chemin 6D dans son espace de travail tout en maintenant la précision et l'exactitude. Cependant, lorsque les axes et les articulations coïncident, une singularité se produit et le robot n'est plus en mesure de se déplacer avec les 6 degrés de liberté à sa disposition.
Avec ce robot, vous constatez qu'il ne peut pas faire pivoter son effecteur d'extrémité autour des axes qui coïncident avec les articulations tournantes. Ce type de singularité est souvent appelé verrou de cardan. Étant donné que la plupart des singularités sont résolues à l'aide d'équations, vous constatez qu'il devient plus difficile de déterminer la vitesse de certains vecteurs cartésiens. Lorsque la singularité se produit, cela vous empêche de déterminer l'intensité des nombres associés aux vitesses présentées.
Être capable de mesurer les vitesses d'un bras robotisé est essentiel pour garantir le respect de la sécurité. Face à un problème de singularité, vous constatez qu'il présente un grand risque pour la robotique même si elle n'en est pas encore à ce stade. Il en résulte des vitesses articulaires élevées qui peuvent être dangereuses, surtout si vous travaillez avec des robots industriels gros et rapides. C'est pourquoi il est si important de cartographier les vitesses avec lesquelles vous travaillez. Source :Youtube
En ce qui concerne la singularité du robot, elle affecte non seulement la cinématique de vitesse inverse, mais se répercute également sur les équations cinématiques de position inverse. Lorsque vous travaillez avec des robots industriels, vous constaterez qu'ils présentent des équations et des solutions pour différentes positions d'articulation. Les différentes solutions présentées sont étroitement liées aux différents types de configuration.
Par exemple, si votre robot propose 8 solutions uniques pour les positions articulaires jusqu'à la position de l'effecteur final, il proposera également 8 types de configuration différents. Pour changer un type de configuration il faudrait passer par une singularité. Les singularités sont les frontières trouvées entre les entités 6D présentées dans l'espace de travail cartésien est un robot typique à 6 axes. Cela limite les différentes configurations que vous pouvez réaliser et les limites de l'espace de travail disponibles pour votre robot industriel. Source :blog. grabcad.com
Étant donné que des singularités de robot peuvent se produire dans n'importe quel bras robotique industriel avec lequel vous travaillez, il est important de réaliser qu'il existe différents types. Tout comme le bras robotique se compose de différentes parties, les singularités affecteront également ces différentes parties, ce qui entraînera divers problèmes.
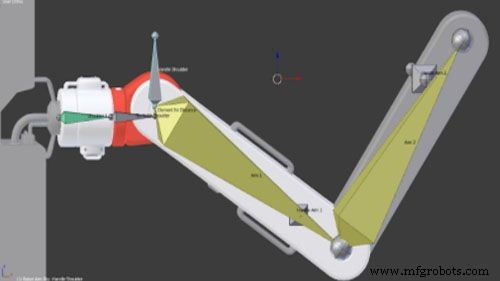
Ici, il est important de garder à l'esprit les différents axes d'articulations présents dans les bras robotiques industriels. Vous allez travailler avec 2 et 3 qui sont parallèles, 1 et 4 qui sont normaux à 2 et 3, l'axe de l'articulation 5 qui est normal aux axes articulations de 4 et 6. Maintenant que vous avez une meilleure compréhension de la différents axes et articulations, vous êtes mieux placé pour explorer les types de singularité. Les types de singularités les plus apparents dans un bras de robot articulé verticalement à prendre en compte : Source :sites. google.com
Lorsqu'il s'agit de bras de robot articulés verticalement avec des poignets alignés, ils ont tendance à avoir la singularité du poignet comme problème le plus répandu. Ce type de singularité se produit lorsque les axes des articulations 4 et 6 coïncident l'un avec l'autre. Lorsque cela se produit, le poignet n'est pas en mesure de déplacer l'effecteur terminal dans la direction de l'axe de l'articulation 5. En application, envisagez un bras de robot industriel qui fonctionne avec précision.
Pour qu'il suive une ligne à travers la singularité, les articulations 4 et 6 doivent être simultanées et tourner à 90 degrés. Cela se fera dans des directions opposées pour s'assurer que le processus est précis. Cela montre que traverser une singularité de poignet est faisable. Cependant, une fois que vous atteignez la singularité, l'effecteur final reste immobile pendant que les deux articulations tournent. Pour que l'effecteur final traverse la singularité, il doit d'abord s'arrêter. S'il était en application, cela nuirait à la précision du bras industriel au travail. Il existe des tonnes de solutions pour la singularité du poignet qui peuvent facilement être mises en œuvre pour corriger le problème. Source :www. professeurelectronique.com
Le deuxième type de singularité que vous pouvez rencontrer lorsque vous travaillez avec des bras de robot articulés verticalement avec des poignets alignés est la singularité du coude. Il se produit principalement lorsque le centre du poignet se trouve sur le plan passant par les axes des articulations 2 et 3. Le centre du poignet est utilisé pour désigner le point d'intersection des axes des articulations 4, 5 et 6. Dans la singularité du coude, vous constaterez que le bras est complètement étiré et peut également présenter des cas où il ne peut pas être complètement plié. Ce type de singularité est principalement déterminé par l'axe et la position de l'articulation 3. La singularité du coude propose également quelques solutions qui peuvent vous aider à résoudre tous les problèmes de performances que vous pourriez rencontrer avec votre bras robotique. Ce type de singularité se produit assez souvent et peut facilement être prédit et également évité. Source :blenderartists. organisation
La dernière singularité que vous pouvez rencontrer est la singularité de l'épaule qui se produit lorsque le centre du poignet du robot se trouve sur la ligne passant par les axes des articulations 1 et 2. Cette singularité est la plus complexe parmi les autres étant donné qu'elle ne dépend pas de une position commune unique. Avec la singularité de l'épaule, la limitation est placée sur le mouvement dans le sens de l'axe d'articulation 2.
En application, pour que le robot suive une ligne à travers la singularité de l'épaule, les articulations 1 et 4 doivent tourner simultanément à un angle de 90 degrés. Cette rotation comme dans la singularité du poignet se fait dans des sens opposés tandis que l'effecteur final reste constant. Comme dans la singularité du poignet, le mouvement à travers la singularité de l'épaule est possible cependant, l'effecteur final devra s'arrêter pour rendre cela possible. Cette singularité comporte également quelques solutions qui peuvent être mises en œuvre pour s'assurer que le bras robotique fonctionne à nouveau au mieux. Source :www. istockphoto.com
En ce qui concerne les robots collaboratifs, vous trouverez les axes des articulations 2, 3 et 4 qui sont parallèles, l'axe de l'articulation 1 se coupe et est normal aux axes de l'articulation 2. De plus, il comporte également l'axe de l'articulation. 5 qui coupe et est normale aux axes des articulations 4 et 6. Comme les singularités des robots articulés, ces robots présentent également des solutions différentes en fonction des différents types de configuration. Les types de singularités inclus dans Cobots incluent :
La singularité du poignet dans ces robots se produit lorsque les axes des articulations 4 et 6 deviennent parallèles. Dans cette situation, vous constaterez peut-être que les axes des articulations 2, 3, 4 et 5 peuvent se déplacer tandis que l'effecteur final reste constant.
Dans ces robots, la singularité du coude se produit lorsque les axes des articulations 2, 3 et 4 sont dans le même plan. Cela limite considérablement le mouvement de l'effecteur final et, à son tour, affecte les performances du bras robotique.
La singularité de l'épaule se produit lorsque le point d'intersection des axes des articulations 5 et 6 se situe dans le plan passant par les axes des articulations 1 et 2. Voici quelques solutions qui peuvent être mises en œuvre pour remédier à la singularité et avoir un robot industriel fonctionnel. Source :www. ennomotive.com
Avec les différents effets que la singularité du robot a sur les processus de fabrication, il est essentiel de disposer de moyens pour les éviter. Étant donné que différents types de robots, les singularités varient en fonction du type de robot avec lequel vous travaillez, avoir une compréhension de base de la façon de les éviter garantira que vos processus s'exécutent facilement. Généralement, les singularités ne peuvent être évitées qu'en veillant à ce que vos cellules robotiques soient correctement conçues. Cela se répercute également sur le design présenté sur la plaque adaptatrice que vous choisissez d'utiliser pour votre effecteur final.
Par exemple, s'il vous arrive de configurer votre bras robotique et d'attribuer mal un emplacement de sélection correspondant à une singularité de poignet, vous ne pouvez pas faire grand-chose pour résoudre le problème. Avec cela, la seule chose à faire est de vérifier si la pose peut être utilisée dans une application non singulière. De plus, les singularités peuvent également être évitées en ajoutant de petits angles à l'outillage. Cela contribue grandement à réduire les chances que le robot se déplace dans une singularité. C'est une technique qui est principalement utilisée par les techniciens qui comprennent la mécanique et peuvent ajuster les solutions à leur avantage.
Enfin, les singularités peuvent également être évitées en adoptant l'approche de programmation et en se faisant aider par les mathématiques. En cela, vous constaterez que le nombre d'axes est fortement réduit pour permettre d'éviter la singularité. Ceci principalement parce qu'un nombre plus élevé d'axes augmente les chances que des singularités se produisent. N'oubliez pas que des singularités se produisent lorsque les axes s'alignent les uns avec les autres, bloquant le mouvement des bras robotiques dans certaines directions. La réduction du nombre d'axes diminue également les chances qu'ils s'alignent et provoquent des blocages.
La singularité des robots est un problème majeur rencontré dans différentes applications industrielles des bras robotiques et autres équipements d'automatisation. Traiter ces problèmes par vous-même peut s'avérer être un frein, c'est pourquoi vous devriez essayer d'éviter la singularité du robot. Cependant, si vous rencontrez ce problème, vous pouvez trouver une solution ou engager un technicien averti qui s'occupera du problème.
Vous pouvez également établir une relation de travail étroite avec un fabricant d'équipements d'automatisation réputé qui vous aidera lorsque vous rencontrerez des singularités. Prenez votre temps pour vous assurer que votre équipement robotique fonctionne bien pour vous aider à personnaliser entièrement et à capitaliser sur son utilisation pour votre entreprise. 
Table des matières
Qu'est-ce que Robot Singularity

Qu'est-ce qui affecte la singularité du robot ?
Fonctions de Robot Singularity

Le déclin de la cartographie de la vitesse
Limites d'espace de travail internes limitées
Types de singularité de robot dans un robot à articulation verticale

Singularité du poignet
Singularité du coude

Singularité de l'épaule
Types de singularité dans un robot collaboratif à six axes (Cobot)

Singularité du poignet
Singularité du coude
Singularité de l'épaule
Comment éviter la singularité en robotique

Conclusion
Robot industriel
- Enveloppe de travail du robot :qu'est-ce que c'est ?
- Différents degrés de liberté dans les bras robotiques :une explication complète
- Les bras robotiques dans la fabrication et leurs avantages
- Quels sont les avantages des bras robotiques pour les humains ?
- Qu'est-ce qu'un poignet de robot :un guide définitif
- Qu'est-ce que le soudage robotisé ? - Processus et application
- Que sont les cobots ?
- Robotique guidée par la vision
- Qu'est-ce qu'un robot de boissons ?