


Réduction du bruit et des vibrations des moteurs pas à pas dans les applications de contrôle de mouvement de précision
Les moteurs pas à pas fonctionnent bien dans une large gamme d'applications, mais peuvent être confrontés à des problèmes d'ondulation de couple et de distorsion de courant. Découvrez QuietStep, un algorithme propriétaire d'Allegro MicroSystems, comme solution possible.
Les moteurs pas à pas offrent des avantages uniques par rapport aux moteurs à courant continu (CC) et à courant continu sans balais (BLDC) dans de nombreuses applications. Un moteur pas à pas bipolaire fournit une position précise en boucle ouverte ainsi qu'un couple à vitesse nulle sans utiliser de boucle de contrôle ou de capteurs externes. Grâce à leurs capacités de pas à pas contrôlées, les moteurs pas à pas fonctionnent bien dans une large gamme d'applications de contrôle de mouvement de précision, notamment les téléviseurs en circuit fermé (CCTV), les imprimantes 3D, la commande numérique par ordinateur (CNC), les équipements de fabrication de textiles et les machines de prélèvement et de placement.
Le déploiement réussi des moteurs pas à pas nécessite une gestion efficace du bruit et des vibrations. Dans les applications de vidéosurveillance, par exemple, les vibrations se traduisent directement par le capteur d'image et le cardan. Un zoom important combiné à un mouvement peut déformer l'image. Dans l'impression 3D, la résonance ou le dépassement du moteur causé par une ondulation de couple élevée peut entraîner de nombreux artefacts d'impression indésirables. Dans la plupart des cas, la réduction des vibrations du moteur permet d'obtenir une meilleure qualité d'image ou une impression 3D plus précise. La réduction des vibrations du moteur permet également un fonctionnement global plus silencieux.
Des technologies avancées basées sur des algorithmes propriétaires sont désormais disponibles pour minimiser le bruit et les vibrations dans les conceptions de moteurs pas à pas en réduisant les ondulations de couple et la distorsion du courant. Avant d'explorer ces solutions de contrôle de mouvement, il est utile de comprendre ce qui cause les vibrations et à leur tour le bruit audible. Tout d'abord, examinons de plus près le fonctionnement d'un moteur pas à pas.
Principes de base du stepper
Un moteur pas à pas bipolaire est un moteur à courant continu à positions polaires discrètes constitué de plusieurs bobines disposées en deux groupes appelés phases. Le rapport de courant entre les deux phases détermine la position du rotor entre les deux enroulements. De cette façon, un moteur pas à pas peut diviser sa position entre deux pôles en incréments plus petits appelés micropas.
Le courant dans chaque enroulement de moteur pas à pas peut être additionné pour créer un vecteur où l'amplitude du vecteur est le couple. En examinant le courant dans chacune des deux phases dans l'espace polaire, nous pouvons visualiser le vecteur pendant qu'il tourne à travers chaque cycle électrique.
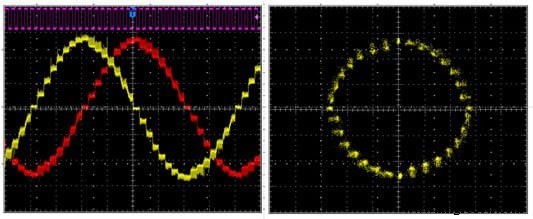
Figure 1. Courant de phase dans chacun des deux enroulements d'un moteur pas à pas bipolaire en 1/8ème de pas (gauche). Courant de phase dans chacun des deux enroulements d'un moteur pas à pas bipolaire en 1/8ème de pas mais représenté dans le domaine polaire (à droite).
Dans le domaine temporel (figure 1 à gauche), le couple est défini comme la somme de l'aire sous les deux courbes. Dans le domaine polaire (Figure 1 à droite), l'amplitude du vecteur est le couple. Sur ces images, nous pouvons voir que le couple est constant à mesure que le champ se déplace à travers chaque cycle électrique. Lorsque le couple n'est pas constant, le système subit des vibrations et des bruits audibles.
En supposant que le moteur ne fonctionne pas à résonance, l'ondulation de couple devient la plus grande source de bruit audible et de vibration dans un moteur pas à pas.
Contrôler un moteur pas à pas (contrôle de courant)
Le contrôle du courant par modulation de largeur d'impulsion (PWM) est le moyen le plus courant de piloter un moteur pas à pas. En mettant en œuvre le contrôle du courant, le contrôleur PWM hache la sortie, limitant le courant dans chaque enroulement pour maintenir un rapport qui définit la position du rotor.
La nature du contrôle de courant PWM entraîne une ondulation de courant basée sur le cycle de service appliqué, l'inductance du moteur et la tension à ses bornes. Pour minimiser l'ondulation, le contrôleur peut gérer la façon dont le courant diminue dans les enroulements en mettant en œuvre divers modes de décroissance.
Passons en revue les modes de décroissance courants pour un seul cycle PWM commençant par l'accélération du courant du variateur.
Après l'entraînement, illustré à la figure 2A, le mode de décroissance est mis en œuvre pendant le temps d'arrêt PWM via deux méthodes synchrones illustrées aux figures 2B et 2C.
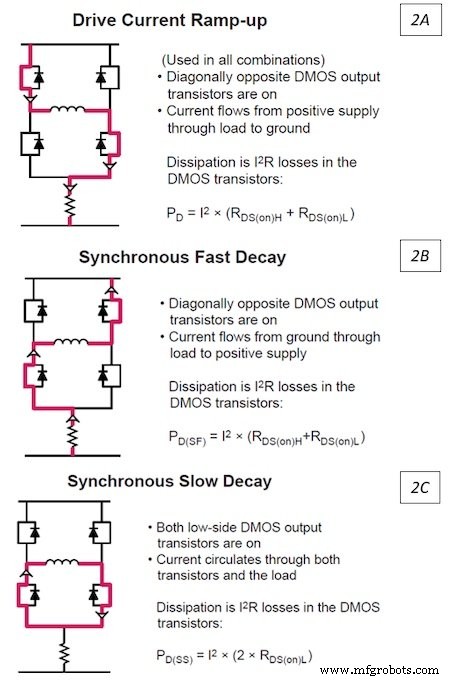
Figure 2. Chemin actuel en pont complet montrant les modes d'entraînement et de décroissance.
La décroissance rapide offre un contrôle optimal du courant mais entraîne une ondulation élevée. Une décroissance lente entraîne une faible ondulation, mais le taux de décroissance est soumis à la force électromotrice arrière (BEMF) du moteur, qui dans certains cas peut créer des distorsions de courant.
La figure 3A montre ce qui peut arriver lors de l'utilisation d'une décroissance lente à 100 %. Lorsque le courant d'enroulement diminue, une décroissance lente ne peut pas diminuer le courant assez rapidement, provoquant une distorsion sur le front descendant. La figure 3B montre les effets de l'utilisation d'une décroissance rapide à 100 %. Le courant d'ondulation est beaucoup plus important, mais le contrôleur maintient un contrôle précis du courant.
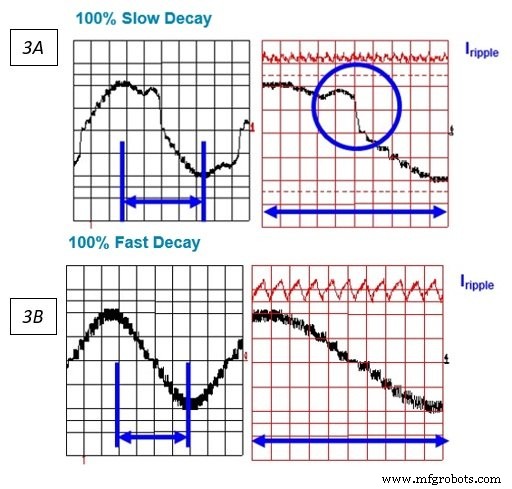
Figure 3A. Une décroissance lente peut produire une distorsion lorsque le courant dans la charge diminue.
Figure 3B. Une décroissance rapide provoque un courant d'ondulation important, ce qui peut entraîner des vibrations et des bruits audibles.
Nous pouvons éviter les effets illustrés à la figure 1 et également maintenir un courant d'ondulation raisonnable en atteignant un compromis. Lorsque le courant diminue dans la charge, le pilote implémente une combinaison de décroissance rapide et lente, connue sous le nom de décroissance mixte. Le temps d'arrêt est divisé en une partie de décroissance rapide et une partie de décroissance lente, comme le montre la figure 4. Lorsque le courant dans la charge augmente, la décroissance lente minimise l'ondulation.
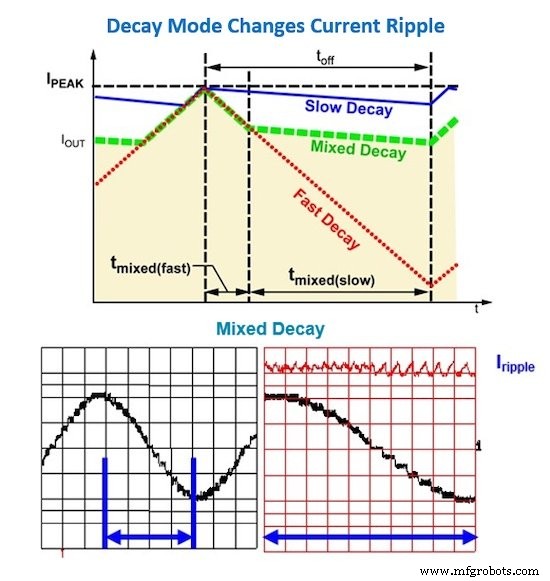
Figure 4. La décroissance mixte minimise l'ondulation tout en maintenant le contrôle du courant dans l'enroulement.
En fonction des caractéristiques d'un moteur pas à pas et de sa constante de temps LR, une décroissance lente sur le front montant peut créer des problèmes à faibles courants où le taux de variation du courant est trop rapide pour que le contrôleur PWM régule à des courants faibles en raison de la suppression de l'amplificateur de détection de courant. Ce scénario peut entraîner une distorsion du courant lorsque le courant dans la charge augmente, comme le montre la figure 5.
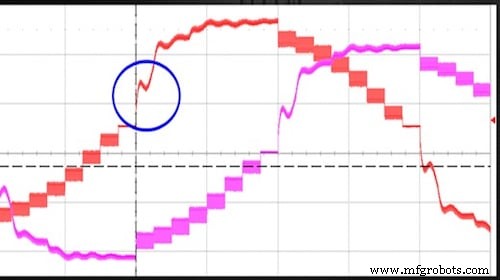
Figure 5. Une décroissance lente sur le front montant peut provoquer une distorsion dans les moteurs avec certaines caractéristiques LR.
Il est difficile de parvenir à un compromis facile qui fonctionne pour tous les moteurs pas à pas bipolaires. Pour résoudre ces problèmes tout en maintenant l'ondulation la plus faible possible, le système doit s'adapter aux différentes caractéristiques du moteur.
Une nouvelle approche pour réduire l'ondulation du couple
Allegro a introduit un moyen de réduire l'ondulation du couple et la distorsion du courant pour les applications de moteur pas à pas. Appelée QuietStep, cette innovation est désormais disponible en option sur le dernier pilote de moteur pas à pas A5984 d'Allegro.
La technologie QuietStep utilise un algorithme propriétaire qui ajuste dynamiquement (à la hausse ou à la baisse) le pourcentage de décroissance rapide nécessaire cycle par cycle pour obtenir les meilleures performances possibles dans toutes les conditions de fonctionnement sans utiliser de logiciel complexe.
L'algorithme inverse l'approche traditionnelle de la décroissance mixte en implémentant d'abord une décroissance lente, suivie d'une décroissance rapide. La figure 6A montre une décroissance mixte traditionnelle avec la partie fixe de décroissance rapide et lente et avec une décroissance rapide commençant le cycle de temps d'arrêt PWM. La figure 6B montre comment la décroissance lente commence lors de l'utilisation de QuietStep au début du cycle de temps d'arrêt PWM. QuietStep ajuste automatiquement le rapport de décroissance rapide et lente pour minimiser l'ondulation du courant tout en maintenant une régulation de courant précise.
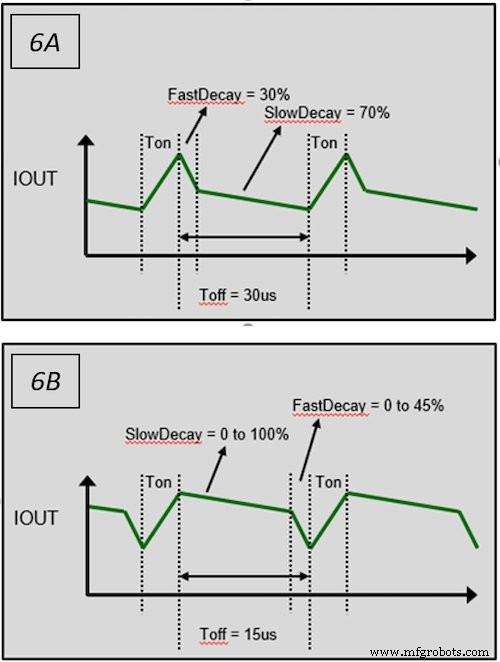
Figure 6A. Décroissance mixte traditionnelle où le rapport de décroissance rapide et lente est fixe.
Figure 6B. QuietStep peut ajuster dynamiquement le rapport de décroissance rapide et lente pour maintenir le contrôle du courant et minimiser l'ondulation du courant.
La décroissance rapide n'est introduite que lorsque cela est nécessaire pour la régulation du courant, ce qui entraîne le courant d'ondulation le plus faible possible. La figure 7 montre le courant d'ondulation élevé résultant d'une décroissance mixte fixe avec un courant décroissant et d'une perte de contrôle du courant avec une décroissance lente avec un courant croissant. La technologie QuietStep élimine ces effets en réduisant de moitié le courant d'ondulation par rapport à la décroissance mixte. Lorsque le courant augmente, QuietStep maintient la régulation de courant jusqu'à zéro ampère.
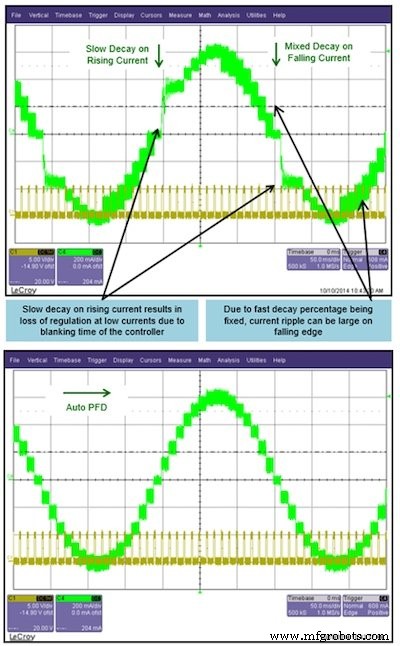
Figure 7. La décroissance lente traditionnelle avec l'augmentation du courant et la décroissance mixte pour la diminution du courant entraînent une perte de régulation lors de l'augmentation avec l'augmentation du courant et une grande ondulation avec la diminution du courant. QuietStep offre une excellente régulation du courant avec un courant croissant tout en maintenant un faible courant d'ondulation tout au long du cycle électrique.
La réduction de l'ondulation et de la résonance du courant au niveau du système minimise les vibrations ainsi que le bruit audible causé par les vibrations. Le résultat est une meilleure imagerie vidéo dans les systèmes de vidéosurveillance et une qualité d'impression supérieure dans les imprimantes 3D.
La réduction du bruit audible et des vibrations améliore presque toutes les applications de commande de moteur, des serrures de porte domotiques et le contrôle des vannes aux systèmes de vision de précision et à l'impression 3D. La technologie QuietStep d'Allegro vous évite d'avoir à essayer de déterminer la source du bruit et des vibrations dans un système. Entièrement intégré au circuit intégré, QuietStep est facile à mettre en œuvre, ne nécessite aucune programmation ni aucun composant externe et est entièrement automatique.
Déploiement de QuietStep avec des pilotes de moteurs pas à pas bipolaires
Avec des pilotes de moteur à micropas permettant cette technologie avancée, comme l'Allegro A5984, les formes d'onde de courant sont automatiquement optimisées sur une large gamme de vitesses et de caractéristiques de moteur pas à pas. Les solutions de pilote de moteur pas à pas, équipées de la technologie QuietStep, ajustent la quantité de décroissance rapide à la volée pendant un cycle PWM pour minimiser l'ondulation du courant dans diverses conditions de fonctionnement.
La fonction QuietStep améliore les performances du système, ce qui se traduit par une réduction du bruit audible du moteur, une réduction des vibrations et une précision accrue des pas. Utilisant cette technologie, le pilote A5984 est conçu pour faire fonctionner des moteurs pas à pas bipolaires des modes pas à pas jusqu'à 1/32 pas et permet une capacité d'entraînement de sortie jusqu'à 40 V et ±2 A. Dans l'ensemble, l'algorithme QuietStep permet un système plus facile conception, réalisation et exploitation.
Pour en savoir plus sur le pilote A5984 et la technologie QuietStep, visitez la page produit A5984.
Allegro MicroSystems est un leader mondial des solutions d'alimentation et de détection pour les systèmes de contrôle de mouvement et d'efficacité énergétique. Pour plus d'informations, visitez le site Web d'Allegro MicroSystems.
Les articles sur l'industrie sont une forme de contenu qui permet aux partenaires de l'industrie de partager des actualités, des messages et des technologies utiles avec les lecteurs d'All About Circuits d'une manière qui ne convient pas au contenu éditorial. Tous les articles de l'industrie sont soumis à des directives éditoriales strictes dans le but d'offrir aux lecteurs des nouvelles utiles, une expertise technique ou des histoires. Les points de vue et opinions exprimés dans les articles de l'industrie sont ceux du partenaire et pas nécessairement ceux d'All About Circuits ou de ses rédacteurs.
Robot industriel
- Circuits permissifs et de verrouillage
- Renesas étend sa gamme de MCU RX24T et RX24U pour les applications de contrôle moteur
- Nanotec :contrôleur de moteur compact pour moteurs CC sans balais et moteurs pas à pas
- Applications et limitations des algorithmes génétiques
- Comment le soudage TIG robotisé ajoute de la précision et du contrôle qualité à votre production
- IQ Motion Control lance une nouvelle gamme de servomoteurs
- La zone grise entre les servomoteurs et les moteurs pas à pas
- Le contrôle de mouvement intégré à la sécurité permet à la sécurité et à la productivité de coexister
- Connexions pour le contrôle :interfaces de communication pour les capteurs de position et de mouvement